
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 3.3//EN" "https://www.web3d.org/specifications/x3d-3.3.dtd">
|
| 3 | <X3D profile='Immersive' version='3.3' xmlns:xsd='http://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-3.3.xsd'> |
| 4 | <head> |
| 5 | <component level='1' name='H-Anim'/> |
| 6 | <meta name='title' content=' HAnimSpecificationLOA3Illustrated.x3d '/> |
| 7 | <meta name='description' content='HAnim Specification reference example providing full coverage and visibility of all specified HAnim constructs, also suitable for re-use as an authoring template. Geometry visualizations are derived from HAnimSpecificationLOA3Invisible.x3d visualization report. Resusable exemplar animations also added via heads-up display (HUD) interface to confirm proper parent-child relationships.'/> |
| 8 | <meta name='reference' content='https://www.web3d.org/files/specifications/19774/V1.0/HAnim/BodyDimensionsAndLOAs.html#LOA3ExampleSourceWithDiamonds'/> |
| 9 | <meta name='created' content='24 April 2013'/> |
| 10 | <meta name='modified' content='2 July 2023'/> |
| 11 | <meta name=' error ' content=' Legacy model, not valid as X3D4 HAnim version 2.0 since HAnim version 1.0 has significant differences and is no longer directly supported '/> |
| 12 | <meta name='creator' content='Matthew T. Beitler, Joe D. Williams, Don Brutzman'/> |
| 13 |
<meta name='Image' content='HAnimSpecificationLOA3Illustrated.png' /> />
|
| 14 |
<meta name='Image' content='HAnimSpecificationLOA3IllustratedLeftSide.png' /> />
|
| 15 | <meta name='reference' content=' HAnimSpecificationLOA3Invisible.x3d '/> |
| 16 | <meta name='reference' content=' HAnimSpecificationLOA3Animation.x3d '/> |
| 17 | <meta name='reference' content=' HAnimSpecificationExampleChangeLog.txt '/> |
| 18 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA1.png' /> />
|
| 19 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA2.png'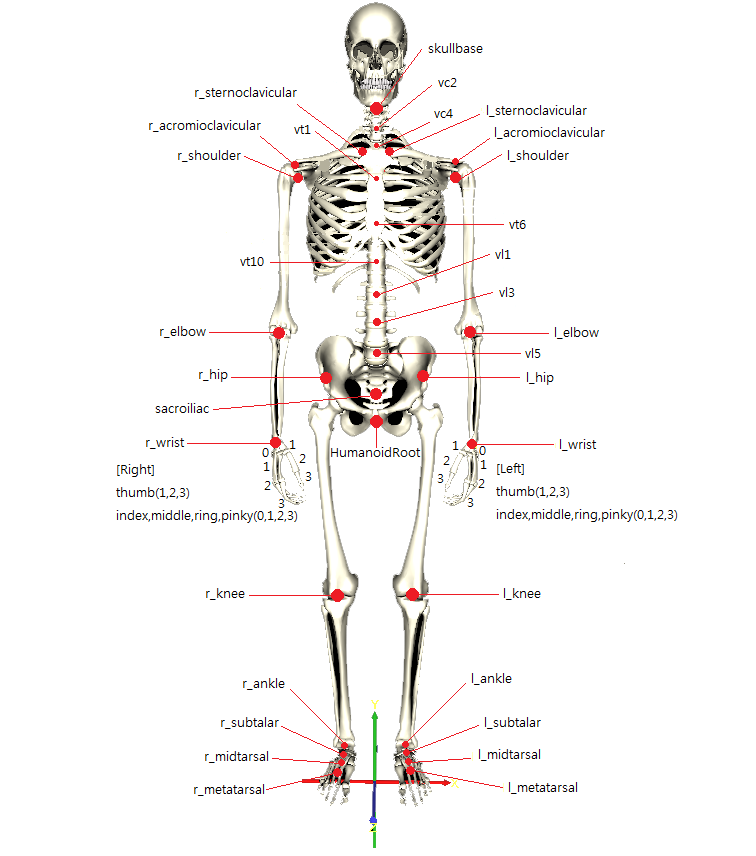 /> />
|
| 20 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA3.png'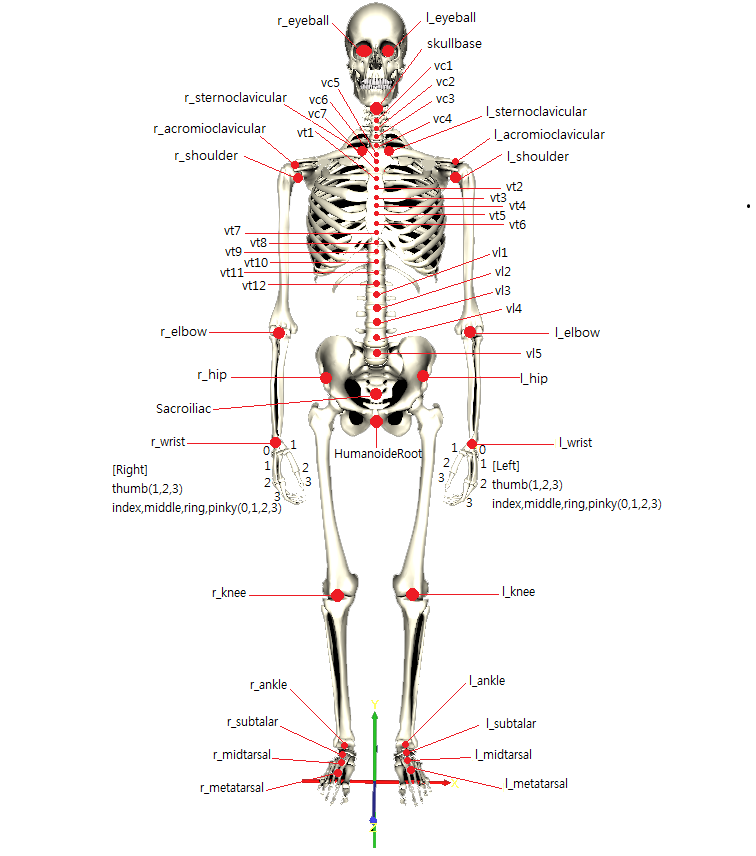 /> />
|
| 21 | <meta name=' TODO ' content=' move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations '/> |
| 22 | <meta name=' warning ' content=' BS Contact and H3DViewer have polygon-culling problems at close range (possibly related to avatarSize), other players look OK '/> |
| 23 | <meta name=' TODO ' content=' insert MetadataInteger nodes indicating LOA for each Joint and Segment '/> |
| 24 | <meta name='reference' content='Norman Badler et al., ANTHROPOMETRY FOR COMPUTER GRAPHICS HUMAN FIGURES, University of Pennsylvania, 1989.'/> |
| 25 | <meta name='reference' content='http://www.cis.upenn.edu/~badler/anthro/89-71.ps'/> |
| 26 | <meta name='reference' content=' tables/AnthropometryForComputerGraphicsHumanFigures89-71.pdf '/> |
| 27 | <meta name='translator' content='Don Brutzman and Joe Williams'/> |
| 28 | <meta name='generator' content='BS Contact Geo 8.001, http://www.bitmanagement.de/en/products/interactive-3d-clients/bs-contact-geo'/> |
| 29 | <meta name='reference' content='originals/LOA3ExampleSourceWithDiamondsOriginal.wrl'/> |
| 30 | <meta name='reference' content=' originals/LOA3ExampleSourceWithDiamondsOriginal.x3d '/> |
| 31 | <meta name='reference' content=' originals/LOA3ExampleSourceWithDiamondsOriginalBsContactExport.x3d '/> |
| 32 | <meta name='reference' content='HAnim Specification Table 4.4 - Face Joint object names, https://www.web3d.org/files/specifications/19774/V1.0/HAnim/concepts.html#FaceJointObjectNames'/> |
| 33 | <meta name='generator' content='X3D-Edit 3.3, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 34 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Specifications/HAnimSpecificationLOA3Illustrated.x3d '/> |
| 35 | <meta name='license' content='../license.html'/> |
| 36 | </head> |
| 37 | <Scene> |
| 38 | <Background skyColor='0.3 0.3 0.3'/> |
| 39 | <NavigationInfo/> |
| 40 | <Group DEF='Original_WorldInfo'> |
| 41 | <WorldInfo info=' " HANIM 200x Default Joint Centers, Level-Of-Articulation 3 HANIM 200x (VRML97) Author name: eMpTy (a.k.a. Matthew T. Beitler) HANIM 200x (VRML97) Author email: beitler@cis.upenn.edu or beitler@acm.org HANIM 200x (VRML97) Author homepage: http://www.cis.upenn.edu/~beitler HANIM 200x (VRML97) Compliance Date: August 12, 2003 HANIM 200x Compliance Information: http://HAnim.org/Specifications/HAnim200x Construction Info (joint centers): The joint centers of this figure are based on the work of Norman Badler, director of the Center for Human Modeling and Simulation at the University of Pennsylvania. The original document which these joint centers are based on can be found at: http://www.cis.upenn.edu/~badler/anthro/89-71.ps " ' title='HANIM 200x Default Joint Centers, LOA3'/> |
| 42 | </Group> |
| 43 | <!-- TODO move viewpoints to be internal to HAnimHumanoid --> |
| 44 | <!-- Viewpoint centerOfRotation="0 0.9149 0.0016" matches initial at-rest locaton of the sacroliac. Note that these viewpoints are external to the HAnimHumanoid and do not move with the human. --> |
| 45 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front' position='0 0.4 4'/> |
| 46 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Close' position='0 0.8 2'/> |
| 47 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Closer' position='0 1.2 1'/> |
| 48 | <Viewpoint centerOfRotation='0 1.5 0.0016' description='Humanoid LOA 3 Front Face' position='0 1.63 1'/> |
| 49 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side' orientation='0 1 0 1.5708' position='2.6 0.8 0'/> |
| 50 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side Close' orientation='0 1 0 1.2' position='1 0.8 0.5'/> |
| 51 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side Close' orientation='0 1 0 -1.2' position='-1 0.8 0.5'/> |
| 52 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side' orientation='0 1 0 -1.5708' position='-2.6 0.8 0'/> |
| 53 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Top' orientation='1 0 0 -1.5708' position='0 3.5 0'/> |
| 54 | <HAnimHumanoid DEF='hanim_humanoid' info='"authorName=Matthew T. Beitler Joe D. Williams Don Brutzman" "authorEmail=HAnim@web3D.org" "copyright=none" "creationDate=12 May 1999" "usageRestrictions=none" "humanoidVersion=2.0" "height=1.7504"' name='humanoid'> |
| 55 | <!-- Only one root HAnimJoint is expected --> |
| 56 |
<!-- HAnimJoint
hanim_humanoid_root is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_humanoid_root' center='0 0.824 0.0277' containerField='skeleton' name='humanoid_root'> |
| 57 |
<!-- HAnimSegment
hanim_sacrum is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_sacrum' name='sacrum'> |
| 58 | <!-- <HAnimJoint name='humanoid_root'/> visualization sphere is placed within <HAnimSegment name='sacrum'/> --> |
| 59 | <TouchSensor description='HAnimJoint HumanoidRoot, HAnimSegment sacrum'/> |
| 60 | <Transform translation='0 0.824 0.0277'> |
| 61 |
<!-- Shape
HAnimJointShape is a DEF node that has 93 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92, USE_93 -->
<Shape DEF='HAnimJointShape'> |
| 62 | <Sphere radius='0.006'/> |
| 63 | <Appearance DEF='HAnimJointAppearance'> |
| 64 | <Material diffuseColor='1 0.5 0' transparency='0.5'/> |
| 65 | </Appearance> |
| 66 | </Shape> |
| 67 | </Transform> |
| 68 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='sacroiliac'/> --> |
| 69 | <Shape> |
| 70 | <LineSet vertexCount='2' containerField='geometry'> |
| 71 | <Coordinate point='0 0.824 0.0277 0 0.9149 0.0016'/> |
| 72 |
<!-- ColorRGBA
HAnimSegmentLineColorRGBA is a DEF node that has 92 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92 --> <ColorRGBA DEF='HAnimSegmentLineColorRGBA' color='1 1 0 1 1 1 0 0.1'/> |
| 73 | </LineSet> |
| 74 | </Shape> |
| 75 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='vl5'/> --> |
| 76 | <Shape> |
| 77 | <LineSet vertexCount='2' containerField='geometry'> |
| 78 | <Coordinate point='0 0.824 0.0277 0.0028 1.0568 -0.0776'/> |
| 79 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 80 | </LineSet> |
| 81 | </Shape> |
| 82 | </HAnimSegment> |
| 83 |
<!-- HAnimJoint
hanim_sacroiliac is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_sacroiliac' center='0 0.9149 0.0016' name='sacroiliac'> |
| 84 |
<!-- HAnimSegment
hanim_pelvis is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_pelvis' name='pelvis'> |
| 85 | <!-- <HAnimJoint name='sacroiliac'/> visualization sphere is placed within <HAnimSegment name='pelvis'/> --> |
| 86 | <TouchSensor description='HAnimJoint sacroiliac, HAnimSegment pelvis'/> |
| 87 | <Transform translation='0 0.9149 0.0016'> |
| 88 | <Shape USE='HAnimJointShape'/> |
| 89 | </Transform> |
| 90 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='l_hip'/> --> |
| 91 | <Shape> |
| 92 | <LineSet vertexCount='2' containerField='geometry'> |
| 93 | <Coordinate point='0 0.9149 0.0016 0.0961 0.9124 -0.0001'/> |
| 94 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 95 | </LineSet> |
| 96 | </Shape> |
| 97 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='r_hip'/> --> |
| 98 | <Shape> |
| 99 | <LineSet vertexCount='2' containerField='geometry'> |
| 100 | <Coordinate point='0 0.9149 0.0016 -0.0961 0.9124 -0.0001'/> |
| 101 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 102 | </LineSet> |
| 103 | </Shape> |
| 104 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_iliocristale'/> --> |
| 105 | <Shape> |
| 106 | <LineSet vertexCount='2' containerField='geometry'> |
| 107 | <Coordinate point='0 0.9149 0.0016 -0.1525 1.0628 0.0035'/> |
| 108 |
<!-- ColorRGBA
HAnimSiteLineColorRGBA is a DEF node that has 90 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90 --> <ColorRGBA DEF='HAnimSiteLineColorRGBA' color='1 0 0 1 1 0 0 0.1'/> |
| 109 | </LineSet> |
| 110 | </Shape> |
| 111 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_trochanterion'/> --> |
| 112 | <Shape> |
| 113 | <LineSet vertexCount='2' containerField='geometry'> |
| 114 | <Coordinate point='0 0.9149 0.0016 -0.1689 0.8419 0.0352'/> |
| 115 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 116 | </LineSet> |
| 117 | </Shape> |
| 118 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_iliocristale'/> --> |
| 119 | <Shape> |
| 120 | <LineSet vertexCount='2' containerField='geometry'> |
| 121 | <Coordinate point='0 0.9149 0.0016 0.1612 1.0537 0.0008'/> |
| 122 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 123 | </LineSet> |
| 124 | </Shape> |
| 125 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_trochanterion'/> --> |
| 126 | <Shape> |
| 127 | <LineSet vertexCount='2' containerField='geometry'> |
| 128 | <Coordinate point='0 0.9149 0.0016 0.1677 0.8336 0.0303'/> |
| 129 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 130 | </LineSet> |
| 131 | </Shape> |
| 132 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_asis'/> --> |
| 133 | <Shape> |
| 134 | <LineSet vertexCount='2' containerField='geometry'> |
| 135 | <Coordinate point='0 0.9149 0.0016 -0.0887 1.0021 0.1112'/> |
| 136 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 137 | </LineSet> |
| 138 | </Shape> |
| 139 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_asis'/> --> |
| 140 | <Shape> |
| 141 | <LineSet vertexCount='2' containerField='geometry'> |
| 142 | <Coordinate point='0 0.9149 0.0016 0.0925 0.9983 0.1052'/> |
| 143 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 144 | </LineSet> |
| 145 | </Shape> |
| 146 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_psis'/> --> |
| 147 | <Shape> |
| 148 | <LineSet vertexCount='2' containerField='geometry'> |
| 149 | <Coordinate point='0 0.9149 0.0016 -0.0716 1.019 -0.1138'/> |
| 150 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 151 | </LineSet> |
| 152 | </Shape> |
| 153 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_psis'/> --> |
| 154 | <Shape> |
| 155 | <LineSet vertexCount='2' containerField='geometry'> |
| 156 | <Coordinate point='0 0.9149 0.0016 0.0774 1.019 -0.1151'/> |
| 157 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 158 | </LineSet> |
| 159 | </Shape> |
| 160 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='crotch'/> --> |
| 161 | <Shape> |
| 162 | <LineSet vertexCount='2' containerField='geometry'> |
| 163 | <Coordinate point='0 0.9149 0.0016 0.0034 0.8266 0.0257'/> |
| 164 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 165 | </LineSet> |
| 166 | </Shape> |
| 167 |
<!-- HAnimSite
hanim_r_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_iliocristale_pt' name='r_iliocristale_pt' translation='-0.1525 1.0628 0.0035'> |
| 168 | <!-- HAnimSite visualization shape --> |
| 169 | <TouchSensor description='HAnimSite r_iliocristale'/> |
| 170 |
<!-- Shape
HAnimSiteShape is a DEF node that has 108 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92, USE_93, USE_94, USE_95, USE_96, USE_97, USE_98, USE_99, USE_100, USE_101, USE_102, USE_103, USE_104, USE_105, USE_106, USE_107, USE_108 -->
<Shape DEF='HAnimSiteShape'> |
| 171 | <IndexedFaceSet DEF='DiamondIFS' creaseAngle='0.5' solid='false' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 172 | <Coordinate point='0 0.008 0 -0.008 0 0 0 0 0.008 0.008 0 0 0 0 -0.008 0 -0.008 0'/> |
| 173 | </IndexedFaceSet> |
| 174 | <Appearance> |
| 175 | <Material diffuseColor='1 0 0'/> |
| 176 | </Appearance> |
| 177 | </Shape> |
| 178 | </HAnimSite> |
| 179 |
<!-- HAnimSite
hanim_r_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_trochanterion_pt' name='r_trochanterion_pt' translation='-0.1689 0.8419 0.0352'> |
| 180 | <!-- HAnimSite visualization shape --> |
| 181 | <TouchSensor description='HAnimSite r_trochanterion'/> |
| 182 | <Shape USE='HAnimSiteShape'/> |
| 183 | </HAnimSite> |
| 184 |
<!-- HAnimSite
hanim_l_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_iliocristale_pt' name='l_iliocristale_pt' translation='0.1612 1.0537 0.0008'> |
| 185 | <!-- HAnimSite visualization shape --> |
| 186 | <TouchSensor description='HAnimSite l_iliocristale'/> |
| 187 | <Shape USE='HAnimSiteShape'/> |
| 188 | </HAnimSite> |
| 189 |
<!-- HAnimSite
hanim_l_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_trochanterion_pt' name='l_trochanterion_pt' translation='0.1677 0.8336 0.0303'> |
| 190 | <!-- HAnimSite visualization shape --> |
| 191 | <TouchSensor description='HAnimSite l_trochanterion'/> |
| 192 | <Shape USE='HAnimSiteShape'/> |
| 193 | </HAnimSite> |
| 194 |
<!-- HAnimSite
hanim_r_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_asis_pt' name='r_asis_pt' translation='-0.0887 1.0021 0.1112'> |
| 195 | <!-- HAnimSite visualization shape --> |
| 196 | <TouchSensor description='HAnimSite r_asis'/> |
| 197 | <Shape USE='HAnimSiteShape'/> |
| 198 | </HAnimSite> |
| 199 |
<!-- HAnimSite
hanim_l_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_asis_pt' name='l_asis_pt' translation='0.0925 0.9983 0.1052'> |
| 200 | <!-- HAnimSite visualization shape --> |
| 201 | <TouchSensor description='HAnimSite l_asis'/> |
| 202 | <Shape USE='HAnimSiteShape'/> |
| 203 | </HAnimSite> |
| 204 |
<!-- HAnimSite
hanim_r_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_psis_pt' name='r_psis_pt' translation='-0.0716 1.019 -0.1138'> |
| 205 | <!-- HAnimSite visualization shape --> |
| 206 | <TouchSensor description='HAnimSite r_psis'/> |
| 207 | <Shape USE='HAnimSiteShape'/> |
| 208 | </HAnimSite> |
| 209 |
<!-- HAnimSite
hanim_l_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_psis_pt' name='l_psis_pt' translation='0.0774 1.019 -0.1151'> |
| 210 | <!-- HAnimSite visualization shape --> |
| 211 | <TouchSensor description='HAnimSite l_psis'/> |
| 212 | <Shape USE='HAnimSiteShape'/> |
| 213 | </HAnimSite> |
| 214 |
<!-- HAnimSite
hanim_crotch_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_crotch_pt' name='crotch_pt' translation='0.0034 0.8266 0.0257'> |
| 215 | <!-- HAnimSite visualization shape --> |
| 216 | <TouchSensor description='HAnimSite crotch'/> |
| 217 | <Shape USE='HAnimSiteShape'/> |
| 218 | </HAnimSite> |
| 219 | </HAnimSegment> |
| 220 |
<!-- HAnimJoint
hanim_l_hip is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_hip' center='0.0961 0.9124 -0.0001' name='l_hip'> |
| 221 |
<!-- HAnimSegment
hanim_l_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thigh' name='l_thigh'> |
| 222 | <!-- <HAnimJoint name='l_hip'/> visualization sphere is placed within <HAnimSegment name='l_thigh'/> --> |
| 223 | <TouchSensor description='HAnimJoint l_hip, HAnimSegment l_thigh'/> |
| 224 | <Transform translation='0.0961 0.9124 -0.0001'> |
| 225 | <Shape USE='HAnimJointShape'/> |
| 226 | </Transform> |
| 227 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_hip'/> to <HAnimJoint name='l_knee'/> --> |
| 228 | <Shape> |
| 229 | <LineSet vertexCount='2' containerField='geometry'> |
| 230 | <Coordinate point='0.0961 0.9124 -0.0001 0.104 0.4867 0.0308'/> |
| 231 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 232 | </LineSet> |
| 233 | </Shape> |
| 234 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_knee_crease'/> --> |
| 235 | <Shape> |
| 236 | <LineSet vertexCount='2' containerField='geometry'> |
| 237 | <Coordinate point='0.0961 0.9124 -0.0001 0.0993 0.4881 -0.0309'/> |
| 238 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 239 | </LineSet> |
| 240 | </Shape> |
| 241 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_lateral_epicn'/> --> |
| 242 | <Shape> |
| 243 | <LineSet vertexCount='2' containerField='geometry'> |
| 244 | <Coordinate point='0.0961 0.9124 -0.0001 0.1598 0.4967 0.0297'/> |
| 245 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 246 | </LineSet> |
| 247 | </Shape> |
| 248 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_medial_epicn'/> --> |
| 249 | <Shape> |
| 250 | <LineSet vertexCount='2' containerField='geometry'> |
| 251 | <Coordinate point='0.0961 0.9124 -0.0001 0.0398 0.4946 0.0303'/> |
| 252 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 253 | </LineSet> |
| 254 | </Shape> |
| 255 |
<!-- HAnimSite
hanim_l_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt' translation='0.0993 0.4881 -0.0309'> |
| 256 | <!-- HAnimSite visualization shape --> |
| 257 | <TouchSensor description='HAnimSite l_knee_crease'/> |
| 258 | <Shape USE='HAnimSiteShape'/> |
| 259 | </HAnimSite> |
| 260 |
<!-- HAnimSite
hanim_l_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt' translation='0.1598 0.4967 0.0297'> |
| 261 | <!-- HAnimSite visualization shape --> |
| 262 | <TouchSensor description='HAnimSite l_femoral_lateral_epicn'/> |
| 263 | <Shape USE='HAnimSiteShape'/> |
| 264 | </HAnimSite> |
| 265 |
<!-- HAnimSite
hanim_l_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt' translation='0.0398 0.4946 0.0303'> |
| 266 | <!-- HAnimSite visualization shape --> |
| 267 | <TouchSensor description='HAnimSite l_femoral_medial_epicn'/> |
| 268 | <Shape USE='HAnimSiteShape'/> |
| 269 | </HAnimSite> |
| 270 | </HAnimSegment> |
| 271 |
<!-- HAnimJoint
hanim_l_knee is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_knee' center='0.104 0.4867 0.0308' name='l_knee'> |
| 272 |
<!-- HAnimSegment
hanim_l_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_calf' name='l_calf'> |
| 273 | <!-- <HAnimJoint name='l_knee'/> visualization sphere is placed within <HAnimSegment name='l_calf'/> --> |
| 274 | <TouchSensor description='HAnimJoint l_knee, HAnimSegment l_calf'/> |
| 275 | <Transform translation='0.104 0.4867 0.0308'> |
| 276 | <Shape USE='HAnimJointShape'/> |
| 277 | </Transform> |
| 278 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_knee'/> to <HAnimJoint name='l_ankle'/> --> |
| 279 | <Shape> |
| 280 | <LineSet vertexCount='2' containerField='geometry'> |
| 281 | <Coordinate point='0.104 0.4867 0.0308 0.1101 0.0656 -0.0736'/> |
| 282 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 283 | </LineSet> |
| 284 | </Shape> |
| 285 | </HAnimSegment> |
| 286 |
<!-- HAnimJoint
hanim_l_ankle is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ankle' center='0.1101 0.0656 -0.0736' name='l_ankle'> |
| 287 |
<!-- HAnimSegment
hanim_l_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hindfoot' name='l_hindfoot'> |
| 288 | <!-- <HAnimJoint name='l_ankle'/> visualization sphere is placed within <HAnimSegment name='l_hindfoot'/> --> |
| 289 | <TouchSensor description='HAnimJoint l_ankle, HAnimSegment l_hindfoot'/> |
| 290 | <Transform translation='0.1101 0.0656 -0.0736'> |
| 291 | <Shape USE='HAnimJointShape'/> |
| 292 | </Transform> |
| 293 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ankle'/> to <HAnimJoint name='l_subtalar'/> --> |
| 294 | <Shape> |
| 295 | <LineSet vertexCount='2' containerField='geometry'> |
| 296 | <Coordinate point='0.1101 0.0656 -0.0736 0.1086 0.0001 -0.0368'/> |
| 297 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 298 | </LineSet> |
| 299 | </Shape> |
| 300 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_lateral_malleolus'/> --> |
| 301 | <Shape> |
| 302 | <LineSet vertexCount='2' containerField='geometry'> |
| 303 | <Coordinate point='0.1101 0.0656 -0.0736 0.1308 0.0597 -0.1032'/> |
| 304 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 305 | </LineSet> |
| 306 | </Shape> |
| 307 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_medial_malleolus'/> --> |
| 308 | <Shape> |
| 309 | <LineSet vertexCount='2' containerField='geometry'> |
| 310 | <Coordinate point='0.1101 0.0656 -0.0736 0.089 0.0716 -0.0881'/> |
| 311 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 312 | </LineSet> |
| 313 | </Shape> |
| 314 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_sphyrion'/> --> |
| 315 | <Shape> |
| 316 | <LineSet vertexCount='2' containerField='geometry'> |
| 317 | <Coordinate point='0.1101 0.0656 -0.0736 0.089 0.0575 -0.0943'/> |
| 318 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 319 | </LineSet> |
| 320 | </Shape> |
| 321 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_calcaneous_post'/> --> |
| 322 | <Shape> |
| 323 | <LineSet vertexCount='2' containerField='geometry'> |
| 324 | <Coordinate point='0.1101 0.0656 -0.0736 0.0974 0.0259 -0.1171'/> |
| 325 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 326 | </LineSet> |
| 327 | </Shape> |
| 328 |
<!-- HAnimSite
hanim_l_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt' translation='0.1308 0.0597 -0.1032'> |
| 329 | <!-- HAnimSite visualization shape --> |
| 330 | <TouchSensor description='HAnimSite l_lateral_malleolus'/> |
| 331 | <Shape USE='HAnimSiteShape'/> |
| 332 | </HAnimSite> |
| 333 |
<!-- HAnimSite
hanim_l_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt' translation='0.089 0.0716 -0.0881'> |
| 334 | <!-- HAnimSite visualization shape --> |
| 335 | <TouchSensor description='HAnimSite l_medial_malleolus'/> |
| 336 | <Shape USE='HAnimSiteShape'/> |
| 337 | </HAnimSite> |
| 338 |
<!-- HAnimSite
hanim_l_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt' translation='0.089 0.0575 -0.0943'> |
| 339 | <!-- HAnimSite visualization shape --> |
| 340 | <TouchSensor description='HAnimSite l_sphyrion'/> |
| 341 | <Shape USE='HAnimSiteShape'/> |
| 342 | </HAnimSite> |
| 343 |
<!-- HAnimSite
hanim_l_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt' translation='0.0974 0.0259 -0.1171'> |
| 344 | <!-- HAnimSite visualization shape --> |
| 345 | <TouchSensor description='HAnimSite l_calcaneous_post'/> |
| 346 | <Shape USE='HAnimSiteShape'/> |
| 347 | </HAnimSite> |
| 348 | </HAnimSegment> |
| 349 |
<!-- HAnimJoint
hanim_l_subtalar is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_subtalar' center='0.1086 0.0001 -0.0368' name='l_subtalar'> |
| 350 |
<!-- HAnimSegment
hanim_l_midproximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_midproximal' name='l_midproximal'> |
| 351 | <!-- <HAnimJoint name='l_subtalar'/> visualization sphere is placed within <HAnimSegment name='l_midproximal'/> --> |
| 352 | <TouchSensor description='HAnimJoint l_subtalar, HAnimSegment l_midproximal'/> |
| 353 | <Transform translation='0.1086 0.0001 -0.0368'> |
| 354 | <Shape USE='HAnimJointShape'/> |
| 355 | </Transform> |
| 356 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_subtalar'/> to <HAnimJoint name='l_midtarsal'/> --> |
| 357 | <Shape> |
| 358 | <LineSet vertexCount='2' containerField='geometry'> |
| 359 | <Coordinate point='0.1086 0.0001 -0.0368 0.1086 0.0001 0.0368'/> |
| 360 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 361 | </LineSet> |
| 362 | </Shape> |
| 363 | </HAnimSegment> |
| 364 |
<!-- HAnimJoint
hanim_l_midtarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_midtarsal' center='0.1086 0.0001 0.0368' name='l_midtarsal'> |
| 365 |
<!-- HAnimSegment
hanim_l_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middistal' name='l_middistal'> |
| 366 | <!-- <HAnimJoint name='l_midtarsal'/> visualization sphere is placed within <HAnimSegment name='l_middistal'/> --> |
| 367 | <TouchSensor description='HAnimJoint l_midtarsal, HAnimSegment l_middistal'/> |
| 368 | <Transform translation='0.1086 0.0001 0.0368'> |
| 369 | <Shape USE='HAnimJointShape'/> |
| 370 | </Transform> |
| 371 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_midtarsal'/> to <HAnimJoint name='l_metatarsal'/> --> |
| 372 | <Shape> |
| 373 | <LineSet vertexCount='2' containerField='geometry'> |
| 374 | <Coordinate point='0.1086 0.0001 0.0368 0.1086 0 0.0762'/> |
| 375 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 376 | </LineSet> |
| 377 | </Shape> |
| 378 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_midtarsal'/> to <HAnimSite name='l_metatarsal_pha1'/> --> |
| 379 | <Shape> |
| 380 | <LineSet vertexCount='2' containerField='geometry'> |
| 381 | <Coordinate point='0.1086 0.0001 0.0368 0.0816 0.0232 0.0106'/> |
| 382 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 383 | </LineSet> |
| 384 | </Shape> |
| 385 |
<!-- HAnimSite
hanim_l_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt' translation='0.0816 0.0232 0.0106'> |
| 386 | <!-- HAnimSite visualization shape --> |
| 387 | <TouchSensor description='HAnimSite l_metatarsal_pha1'/> |
| 388 | <Shape USE='HAnimSiteShape'/> |
| 389 | </HAnimSite> |
| 390 | </HAnimSegment> |
| 391 |
<!-- HAnimJoint
hanim_l_metatarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_metatarsal' center='0.1086 0 0.0762' name='l_metatarsal'> |
| 392 |
<!-- HAnimSegment
hanim_l_forefoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_forefoot' name='l_forefoot'> |
| 393 | <!-- <HAnimJoint name='l_metatarsal'/> visualization sphere is placed within <HAnimSegment name='l_forefoot'/> --> |
| 394 | <TouchSensor description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot'/> |
| 395 | <Transform translation='0.1086 0 0.0762'> |
| 396 | <Shape USE='HAnimJointShape'/> |
| 397 | </Transform> |
| 398 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_forefoot_tip'/> --> |
| 399 | <Shape> |
| 400 | <LineSet vertexCount='2' containerField='geometry'> |
| 401 | <Coordinate point='0.1086 0 0.0762 0.1354 0.0016 0.1476'/> |
| 402 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 403 | </LineSet> |
| 404 | </Shape> |
| 405 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_metatarsal_pha5'/> --> |
| 406 | <Shape> |
| 407 | <LineSet vertexCount='2' containerField='geometry'> |
| 408 | <Coordinate point='0.1086 0 0.0762 0.1825 0.007 0.0928'/> |
| 409 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 410 | </LineSet> |
| 411 | </Shape> |
| 412 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_digit2'/> --> |
| 413 | <Shape> |
| 414 | <LineSet vertexCount='2' containerField='geometry'> |
| 415 | <Coordinate point='0.1086 0 0.0762 0.1195 0.0079 0.1433'/> |
| 416 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 417 | </LineSet> |
| 418 | </Shape> |
| 419 |
<!-- HAnimSite
hanim_l_forefoot_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_forefoot_tip' name='l_forefoot_tip' translation='0.1354 0.0016 0.1476'> |
| 420 | <!-- HAnimSite visualization shape --> |
| 421 | <TouchSensor description='HAnimSite l_forefoot_tip'/> |
| 422 | <Shape USE='HAnimSiteShape'/> |
| 423 | </HAnimSite> |
| 424 |
<!-- HAnimSite
hanim_l_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt' translation='0.1825 0.007 0.0928'> |
| 425 | <!-- HAnimSite visualization shape --> |
| 426 | <TouchSensor description='HAnimSite l_metatarsal_pha5'/> |
| 427 | <Shape USE='HAnimSiteShape'/> |
| 428 | </HAnimSite> |
| 429 |
<!-- HAnimSite
hanim_l_digit2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_digit2_pt' name='l_digit2_pt' translation='0.1195 0.0079 0.1433'> |
| 430 | <!-- HAnimSite visualization shape --> |
| 431 | <TouchSensor description='HAnimSite l_digit2'/> |
| 432 | <Shape USE='HAnimSiteShape'/> |
| 433 | </HAnimSite> |
| 434 | </HAnimSegment> |
| 435 | </HAnimJoint> |
| 436 | </HAnimJoint> |
| 437 | </HAnimJoint> |
| 438 | </HAnimJoint> |
| 439 | </HAnimJoint> |
| 440 | </HAnimJoint> |
| 441 |
<!-- HAnimJoint
hanim_r_hip is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_hip' center='-0.0961 0.9124 -0.0001' name='r_hip'> |
| 442 |
<!-- HAnimSegment
hanim_r_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thigh' name='r_thigh'> |
| 443 | <!-- <HAnimJoint name='r_hip'/> visualization sphere is placed within <HAnimSegment name='r_thigh'/> --> |
| 444 | <TouchSensor description='HAnimJoint r_hip, HAnimSegment r_thigh'/> |
| 445 | <Transform translation='-0.0961 0.9124 -0.0001'> |
| 446 | <Shape USE='HAnimJointShape'/> |
| 447 | </Transform> |
| 448 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_hip'/> to <HAnimJoint name='r_knee'/> --> |
| 449 | <Shape> |
| 450 | <LineSet vertexCount='2' containerField='geometry'> |
| 451 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.104 0.4867 0.0308'/> |
| 452 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 453 | </LineSet> |
| 454 | </Shape> |
| 455 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_knee_crease'/> --> |
| 456 | <Shape> |
| 457 | <LineSet vertexCount='2' containerField='geometry'> |
| 458 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.0825 0.4932 -0.0326'/> |
| 459 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 460 | </LineSet> |
| 461 | </Shape> |
| 462 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_lateral_epicn'/> --> |
| 463 | <Shape> |
| 464 | <LineSet vertexCount='2' containerField='geometry'> |
| 465 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.1421 0.4992 0.031'/> |
| 466 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 467 | </LineSet> |
| 468 | </Shape> |
| 469 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_medial_epicn'/> --> |
| 470 | <Shape> |
| 471 | <LineSet vertexCount='2' containerField='geometry'> |
| 472 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.0221 0.5014 0.0289'/> |
| 473 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 474 | </LineSet> |
| 475 | </Shape> |
| 476 |
<!-- HAnimSite
hanim_r_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt' translation='-0.0825 0.4932 -0.0326'> |
| 477 | <!-- HAnimSite visualization shape --> |
| 478 | <TouchSensor description='HAnimSite r_knee_crease'/> |
| 479 | <Shape USE='HAnimSiteShape'/> |
| 480 | </HAnimSite> |
| 481 |
<!-- HAnimSite
hanim_r_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt' translation='-0.1421 0.4992 0.031'> |
| 482 | <!-- HAnimSite visualization shape --> |
| 483 | <TouchSensor description='HAnimSite r_femoral_lateral_epicn'/> |
| 484 | <Shape USE='HAnimSiteShape'/> |
| 485 | </HAnimSite> |
| 486 |
<!-- HAnimSite
hanim_r_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt' translation='-0.0221 0.5014 0.0289'> |
| 487 | <!-- HAnimSite visualization shape --> |
| 488 | <TouchSensor description='HAnimSite r_femoral_medial_epicn'/> |
| 489 | <Shape USE='HAnimSiteShape'/> |
| 490 | </HAnimSite> |
| 491 | </HAnimSegment> |
| 492 |
<!-- HAnimJoint
hanim_r_knee is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_knee' center='-0.104 0.4867 0.0308' name='r_knee'> |
| 493 |
<!-- HAnimSegment
hanim_r_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_calf' name='r_calf'> |
| 494 | <!-- <HAnimJoint name='r_knee'/> visualization sphere is placed within <HAnimSegment name='r_calf'/> --> |
| 495 | <TouchSensor description='HAnimJoint r_knee, HAnimSegment r_calf'/> |
| 496 | <Transform translation='-0.104 0.4867 0.0308'> |
| 497 | <Shape USE='HAnimJointShape'/> |
| 498 | </Transform> |
| 499 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_knee'/> to <HAnimJoint name='r_ankle'/> --> |
| 500 | <Shape> |
| 501 | <LineSet vertexCount='2' containerField='geometry'> |
| 502 | <Coordinate point='-0.104 0.4867 0.0308 -0.1101 0.0656 -0.0736'/> |
| 503 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 504 | </LineSet> |
| 505 | </Shape> |
| 506 | </HAnimSegment> |
| 507 |
<!-- HAnimJoint
hanim_r_ankle is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ankle' center='-0.1101 0.0656 -0.0736' name='r_ankle'> |
| 508 |
<!-- HAnimSegment
hanim_r_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hindfoot' name='r_hindfoot'> |
| 509 | <!-- <HAnimJoint name='r_ankle'/> visualization sphere is placed within <HAnimSegment name='r_hindfoot'/> --> |
| 510 | <TouchSensor description='HAnimJoint r_ankle, HAnimSegment r_hindfoot'/> |
| 511 | <Transform translation='-0.1101 0.0656 -0.0736'> |
| 512 | <Shape USE='HAnimJointShape'/> |
| 513 | </Transform> |
| 514 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ankle'/> to <HAnimJoint name='r_subtalar'/> --> |
| 515 | <Shape> |
| 516 | <LineSet vertexCount='2' containerField='geometry'> |
| 517 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.1086 0.0001 -0.0368'/> |
| 518 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 519 | </LineSet> |
| 520 | </Shape> |
| 521 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_lateral_malleolus'/> --> |
| 522 | <Shape> |
| 523 | <LineSet vertexCount='2' containerField='geometry'> |
| 524 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.1006 0.0658 -0.1075'/> |
| 525 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 526 | </LineSet> |
| 527 | </Shape> |
| 528 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_medial_malleolus'/> --> |
| 529 | <Shape> |
| 530 | <LineSet vertexCount='2' containerField='geometry'> |
| 531 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0591 0.076 -0.0928'/> |
| 532 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 533 | </LineSet> |
| 534 | </Shape> |
| 535 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_sphyrion'/> --> |
| 536 | <Shape> |
| 537 | <LineSet vertexCount='2' containerField='geometry'> |
| 538 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0603 0.061 -0.1002'/> |
| 539 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 540 | </LineSet> |
| 541 | </Shape> |
| 542 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_calcaneous_post'/> --> |
| 543 | <Shape> |
| 544 | <LineSet vertexCount='2' containerField='geometry'> |
| 545 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0692 0.0297 -0.1221'/> |
| 546 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 547 | </LineSet> |
| 548 | </Shape> |
| 549 |
<!-- HAnimSite
hanim_r_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt' translation='-0.1006 0.0658 -0.1075'> |
| 550 | <!-- HAnimSite visualization shape --> |
| 551 | <TouchSensor description='HAnimSite r_lateral_malleolus'/> |
| 552 | <Shape USE='HAnimSiteShape'/> |
| 553 | </HAnimSite> |
| 554 |
<!-- HAnimSite
hanim_r_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt' translation='-0.0591 0.076 -0.0928'> |
| 555 | <!-- HAnimSite visualization shape --> |
| 556 | <TouchSensor description='HAnimSite r_medial_malleolus'/> |
| 557 | <Shape USE='HAnimSiteShape'/> |
| 558 | </HAnimSite> |
| 559 |
<!-- HAnimSite
hanim_r_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt' translation='-0.0603 0.061 -0.1002'> |
| 560 | <!-- HAnimSite visualization shape --> |
| 561 | <TouchSensor description='HAnimSite r_sphyrion'/> |
| 562 | <Shape USE='HAnimSiteShape'/> |
| 563 | </HAnimSite> |
| 564 |
<!-- HAnimSite
hanim_r_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt' translation='-0.0692 0.0297 -0.1221'> |
| 565 | <!-- HAnimSite visualization shape --> |
| 566 | <TouchSensor description='HAnimSite r_calcaneous_post'/> |
| 567 | <Shape USE='HAnimSiteShape'/> |
| 568 | </HAnimSite> |
| 569 | </HAnimSegment> |
| 570 |
<!-- HAnimJoint
hanim_r_subtalar is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_subtalar' center='-0.1086 0.0001 -0.0368' name='r_subtalar'> |
| 571 |
<!-- HAnimSegment
hanim_r_midproximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_midproximal' name='r_midproximal'> |
| 572 | <!-- <HAnimJoint name='r_subtalar'/> visualization sphere is placed within <HAnimSegment name='r_midproximal'/> --> |
| 573 | <TouchSensor description='HAnimJoint r_subtalar, HAnimSegment r_midproximal'/> |
| 574 | <Transform translation='-0.1086 0.0001 -0.0368'> |
| 575 | <Shape USE='HAnimJointShape'/> |
| 576 | </Transform> |
| 577 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_subtalar'/> to <HAnimJoint name='r_midtarsal'/> --> |
| 578 | <Shape> |
| 579 | <LineSet vertexCount='2' containerField='geometry'> |
| 580 | <Coordinate point='-0.1086 0.0001 -0.0368 -0.1086 0.0001 0.0368'/> |
| 581 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 582 | </LineSet> |
| 583 | </Shape> |
| 584 | </HAnimSegment> |
| 585 |
<!-- HAnimJoint
hanim_r_midtarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midtarsal' center='-0.1086 0.0001 0.0368' name='r_midtarsal'> |
| 586 |
<!-- HAnimSegment
hanim_r_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middistal' name='r_middistal'> |
| 587 | <!-- <HAnimJoint name='r_midtarsal'/> visualization sphere is placed within <HAnimSegment name='r_middistal'/> --> |
| 588 | <TouchSensor description='HAnimJoint r_midtarsal, HAnimSegment r_middistal'/> |
| 589 | <Transform translation='-0.1086 0.0001 0.0368'> |
| 590 | <Shape USE='HAnimJointShape'/> |
| 591 | </Transform> |
| 592 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_midtarsal'/> to <HAnimJoint name='r_metatarsal'/> --> |
| 593 | <Shape> |
| 594 | <LineSet vertexCount='2' containerField='geometry'> |
| 595 | <Coordinate point='-0.1086 0.0001 0.0368 -0.1086 0 0.0762'/> |
| 596 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 597 | </LineSet> |
| 598 | </Shape> |
| 599 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_midtarsal'/> to <HAnimSite name='r_metatarsal_pha1'/> --> |
| 600 | <Shape> |
| 601 | <LineSet vertexCount='2' containerField='geometry'> |
| 602 | <Coordinate point='-0.1086 0.0001 0.0368 -0.0521 0.026 0.0127'/> |
| 603 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 604 | </LineSet> |
| 605 | </Shape> |
| 606 |
<!-- HAnimSite
hanim_r_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt' translation='-0.0521 0.026 0.0127'> |
| 607 | <!-- HAnimSite visualization shape --> |
| 608 | <TouchSensor description='HAnimSite r_metatarsal_pha1'/> |
| 609 | <Shape USE='HAnimSiteShape'/> |
| 610 | </HAnimSite> |
| 611 | </HAnimSegment> |
| 612 |
<!-- HAnimJoint
hanim_r_metatarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metatarsal' center='-0.1086 0 0.0762' name='r_metatarsal'> |
| 613 |
<!-- HAnimSegment
hanim_r_forefoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_forefoot' name='r_forefoot'> |
| 614 | <!-- <HAnimJoint name='r_metatarsal'/> visualization sphere is placed within <HAnimSegment name='r_forefoot'/> --> |
| 615 | <TouchSensor description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot'/> |
| 616 | <Transform translation='-0.1086 0 0.0762'> |
| 617 | <Shape USE='HAnimJointShape'/> |
| 618 | </Transform> |
| 619 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_forefoot_tip'/> --> |
| 620 | <Shape> |
| 621 | <LineSet vertexCount='2' containerField='geometry'> |
| 622 | <Coordinate point='-0.1086 0 0.0762 -0.1043 0.0227 0.145'/> |
| 623 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 624 | </LineSet> |
| 625 | </Shape> |
| 626 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_metatarsal_pha5'/> --> |
| 627 | <Shape> |
| 628 | <LineSet vertexCount='2' containerField='geometry'> |
| 629 | <Coordinate point='-0.1086 0 0.0762 -0.1523 0.0166 0.0895'/> |
| 630 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 631 | </LineSet> |
| 632 | </Shape> |
| 633 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_digit2'/> --> |
| 634 | <Shape> |
| 635 | <LineSet vertexCount='2' containerField='geometry'> |
| 636 | <Coordinate point='-0.1086 0 0.0762 -0.0883 0.0134 0.1383'/> |
| 637 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 638 | </LineSet> |
| 639 | </Shape> |
| 640 |
<!-- HAnimSite
hanim_r_forefoot_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_forefoot_tip' name='r_forefoot_tip' translation='-0.1043 0.0227 0.145'> |
| 641 | <!-- HAnimSite visualization shape --> |
| 642 | <TouchSensor description='HAnimSite r_forefoot_tip'/> |
| 643 | <Shape USE='HAnimSiteShape'/> |
| 644 | </HAnimSite> |
| 645 |
<!-- HAnimSite
hanim_r_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt' translation='-0.1523 0.0166 0.0895'> |
| 646 | <!-- HAnimSite visualization shape --> |
| 647 | <TouchSensor description='HAnimSite r_metatarsal_pha5'/> |
| 648 | <Shape USE='HAnimSiteShape'/> |
| 649 | </HAnimSite> |
| 650 |
<!-- HAnimSite
hanim_r_digit2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_digit2_pt' name='r_digit2_pt' translation='-0.0883 0.0134 0.1383'> |
| 651 | <!-- HAnimSite visualization shape --> |
| 652 | <TouchSensor description='HAnimSite r_digit2'/> |
| 653 | <Shape USE='HAnimSiteShape'/> |
| 654 | </HAnimSite> |
| 655 | </HAnimSegment> |
| 656 | </HAnimJoint> |
| 657 | </HAnimJoint> |
| 658 | </HAnimJoint> |
| 659 | </HAnimJoint> |
| 660 | </HAnimJoint> |
| 661 | </HAnimJoint> |
| 662 | </HAnimJoint> |
| 663 | |
| 664 | |
| 665 | <!-- <HAnimJoint name='vl5'/> visualization sphere is placed within <HAnimSegment name='l5'/> --> |
| 666 | <TouchSensor description='HAnimJoint vl5, HAnimSegment l5'/> |
| 667 | <Transform translation='0.0028 1.0568 -0.0776'> |
| 668 | <Shape USE='HAnimJointShape'/> |
| 669 | </Transform> |
| 670 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl5'/> to <HAnimJoint name='vl4'/> --> |
| 671 | <Shape> |
| 672 | <LineSet vertexCount='2' containerField='geometry'> |
| 673 | <Coordinate point='0.0028 1.0568 -0.0776 0.0035 1.0925 -0.0787'/> |
| 674 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 675 | </LineSet> |
| 676 | </Shape> |
| 677 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='waist_preferred_post'/> --> |
| 678 | <Shape> |
| 679 | <LineSet vertexCount='2' containerField='geometry'> |
| 680 | <Coordinate point='0.0028 1.0568 -0.0776 0 1.0915 -0.1091'/> |
| 681 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 682 | </LineSet> |
| 683 | </Shape> |
| 684 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='navel'/> --> |
| 685 | <Shape> |
| 686 | <LineSet vertexCount='2' containerField='geometry'> |
| 687 | <Coordinate point='0.0028 1.0568 -0.0776 0.0069 1.0966 0.1017'/> |
| 688 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 689 | </LineSet> |
| 690 | </Shape> |
| 691 |
<!-- HAnimSite
hanim_waist_preferred_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_waist_preferred_post_pt' name='waist_preferred_post_pt' translation='0 1.0915 -0.1091'> |
| 692 | <!-- HAnimSite visualization shape --> |
| 693 | <TouchSensor description='HAnimSite waist_preferred_post'/> |
| 694 | <Shape USE='HAnimSiteShape'/> |
| 695 | </HAnimSite> |
| 696 |
<!-- HAnimSite
hanim_navel_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_navel_pt' name='navel_pt' translation='0.0069 1.0966 0.1017'> |
| 697 | <!-- HAnimSite visualization shape --> |
| 698 | <TouchSensor description='HAnimSite navel'/> |
| 699 | <Shape USE='HAnimSiteShape'/> |
| 700 | </HAnimSite> |
| 701 | </HAnimSegment> |
| 702 | |
| 703 | |
| 704 | <!-- <HAnimJoint name='vl4'/> visualization sphere is placed within <HAnimSegment name='l4'/> --> |
| 705 | <TouchSensor description='HAnimJoint vl4, HAnimSegment l4'/> |
| 706 | <Transform translation='0.0035 1.0925 -0.0787'> |
| 707 | <Shape USE='HAnimJointShape'/> |
| 708 | </Transform> |
| 709 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl4'/> to <HAnimJoint name='vl3'/> --> |
| 710 | <Shape> |
| 711 | <LineSet vertexCount='2' containerField='geometry'> |
| 712 | <Coordinate point='0.0035 1.0925 -0.0787 0.0041 1.1276 -0.0796'/> |
| 713 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 714 | </LineSet> |
| 715 | </Shape> |
| 716 | </HAnimSegment> |
| 717 | |
| 718 | |
| 719 | <!-- <HAnimJoint name='vl3'/> visualization sphere is placed within <HAnimSegment name='l3'/> --> |
| 720 | <TouchSensor description='HAnimJoint vl3, HAnimSegment l3'/> |
| 721 | <Transform translation='0.0041 1.1276 -0.0796'> |
| 722 | <Shape USE='HAnimJointShape'/> |
| 723 | </Transform> |
| 724 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl3'/> to <HAnimJoint name='vl2'/> --> |
| 725 | <Shape> |
| 726 | <LineSet vertexCount='2' containerField='geometry'> |
| 727 | <Coordinate point='0.0041 1.1276 -0.0796 0.0045 1.1546 -0.08'/> |
| 728 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 729 | </LineSet> |
| 730 | </Shape> |
| 731 | </HAnimSegment> |
| 732 | |
| 733 | |
| 734 | <!-- <HAnimJoint name='vl2'/> visualization sphere is placed within <HAnimSegment name='l2'/> --> |
| 735 | <TouchSensor description='HAnimJoint vl2, HAnimSegment l2'/> |
| 736 | <Transform translation='0.0045 1.1546 -0.08'> |
| 737 | <Shape USE='HAnimJointShape'/> |
| 738 | </Transform> |
| 739 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl2'/> to <HAnimJoint name='vl1'/> --> |
| 740 | <Shape> |
| 741 | <LineSet vertexCount='2' containerField='geometry'> |
| 742 | <Coordinate point='0.0045 1.1546 -0.08 0.0048 1.1912 -0.0805'/> |
| 743 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 744 | </LineSet> |
| 745 | </Shape> |
| 746 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='r_rib10'/> --> |
| 747 | <Shape> |
| 748 | <LineSet vertexCount='2' containerField='geometry'> |
| 749 | <Coordinate point='0.0045 1.1546 -0.08 -0.0711 1.1941 0.1016'/> |
| 750 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 751 | </LineSet> |
| 752 | </Shape> |
| 753 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='l_rib10'/> --> |
| 754 | <Shape> |
| 755 | <LineSet vertexCount='2' containerField='geometry'> |
| 756 | <Coordinate point='0.0045 1.1546 -0.08 0.0871 1.1925 0.0992'/> |
| 757 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 758 | </LineSet> |
| 759 | </Shape> |
| 760 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='rib10_midspine'/> --> |
| 761 | <Shape> |
| 762 | <LineSet vertexCount='2' containerField='geometry'> |
| 763 | <Coordinate point='0.0045 1.1546 -0.08 0.0049 1.1908 -0.1113'/> |
| 764 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 765 | </LineSet> |
| 766 | </Shape> |
| 767 |
<!-- HAnimSite
hanim_r_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_rib10_pt' name='r_rib10_pt' translation='-0.0711 1.1941 0.1016'> |
| 768 | <!-- HAnimSite visualization shape --> |
| 769 | <TouchSensor description='HAnimSite r_rib10'/> |
| 770 | <Shape USE='HAnimSiteShape'/> |
| 771 | </HAnimSite> |
| 772 |
<!-- HAnimSite
hanim_l_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_rib10_pt' name='l_rib10_pt' translation='0.0871 1.1925 0.0992'> |
| 773 | <!-- HAnimSite visualization shape --> |
| 774 | <TouchSensor description='HAnimSite l_rib10'/> |
| 775 | <Shape USE='HAnimSiteShape'/> |
| 776 | </HAnimSite> |
| 777 |
<!-- HAnimSite
hanim_rib10_midspine_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_rib10_midspine_pt' name='rib10_midspine_pt' translation='0.0049 1.1908 -0.1113'> |
| 778 | <!-- HAnimSite visualization shape --> |
| 779 | <TouchSensor description='HAnimSite rib10_midspine'/> |
| 780 | <Shape USE='HAnimSiteShape'/> |
| 781 | </HAnimSite> |
| 782 | </HAnimSegment> |
| 783 | |
| 784 | |
| 785 | <!-- <HAnimJoint name='vl1'/> visualization sphere is placed within <HAnimSegment name='l1'/> --> |
| 786 | <TouchSensor description='HAnimJoint vl1, HAnimSegment l1'/> |
| 787 | <Transform translation='0.0048 1.1912 -0.0805'> |
| 788 | <Shape USE='HAnimJointShape'/> |
| 789 | </Transform> |
| 790 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl1'/> to <HAnimJoint name='vt12'/> --> |
| 791 | <Shape> |
| 792 | <LineSet vertexCount='2' containerField='geometry'> |
| 793 | <Coordinate point='0.0048 1.1912 -0.0805 0.0051 1.2278 -0.0808'/> |
| 794 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 795 | </LineSet> |
| 796 | </Shape> |
| 797 | </HAnimSegment> |
| 798 |
<!-- HAnimJoint
hanim_vt12 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_vt12' center='0.0051 1.2278 -0.0808' name='vt12'> |
| 799 | |
| 800 | <!-- <HAnimJoint name='vt12'/> visualization sphere is placed within <HAnimSegment name='t12'/> --> |
| 801 | <TouchSensor description='HAnimJoint vt12, HAnimSegment t12'/> |
| 802 | <Transform translation='0.0051 1.2278 -0.0808'> |
| 803 | <Shape USE='HAnimJointShape'/> |
| 804 | </Transform> |
| 805 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt12'/> to <HAnimJoint name='vt11'/> --> |
| 806 | <Shape> |
| 807 | <LineSet vertexCount='2' containerField='geometry'> |
| 808 | <Coordinate point='0.0051 1.2278 -0.0808 0.0053 1.2679 -0.081'/> |
| 809 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 810 | </LineSet> |
| 811 | </Shape> |
| 812 | </HAnimSegment> |
| 813 |
<!-- HAnimJoint
hanim_vt11 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_vt11' center='0.0053 1.2679 -0.081' name='vt11'> |
| 814 | |
| 815 | <!-- <HAnimJoint name='vt11'/> visualization sphere is placed within <HAnimSegment name='t11'/> --> |
| 816 | <TouchSensor description='HAnimJoint vt11, HAnimSegment t11'/> |
| 817 | <Transform translation='0.0053 1.2679 -0.081'> |
| 818 | <Shape USE='HAnimJointShape'/> |
| 819 | </Transform> |
| 820 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt11'/> to <HAnimJoint name='vt10'/> --> |
| 821 | <Shape> |
| 822 | <LineSet vertexCount='2' containerField='geometry'> |
| 823 | <Coordinate point='0.0053 1.2679 -0.081 0.0056 1.2848 -0.0822'/> |
| 824 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 825 | </LineSet> |
| 826 | </Shape> |
| 827 | </HAnimSegment> |
| 828 |
<!-- HAnimJoint
hanim_vt10 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_vt10' center='0.0056 1.2848 -0.0822' name='vt10'> |
| 829 | |
| 830 | <!-- <HAnimJoint name='vt10'/> visualization sphere is placed within <HAnimSegment name='t10'/> --> |
| 831 | <TouchSensor description='HAnimJoint vt10, HAnimSegment t10'/> |
| 832 | <Transform translation='0.0056 1.2848 -0.0822'> |
| 833 | <Shape USE='HAnimJointShape'/> |
| 834 | </Transform> |
| 835 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt10'/> to <HAnimJoint name='vt9'/> --> |
| 836 | <Shape> |
| 837 | <LineSet vertexCount='2' containerField='geometry'> |
| 838 | <Coordinate point='0.0056 1.2848 -0.0822 0.0057 1.3126 -0.0838'/> |
| 839 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 840 | </LineSet> |
| 841 | </Shape> |
| 842 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt10'/> to <HAnimSite name='substernale'/> --> |
| 843 | <Shape> |
| 844 | <LineSet vertexCount='2' containerField='geometry'> |
| 845 | <Coordinate point='0.0056 1.2848 -0.0822 0.0085 1.2995 0.1147'/> |
| 846 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 847 | </LineSet> |
| 848 | </Shape> |
| 849 |
<!-- HAnimSite
hanim_substernale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_substernale_pt' name='substernale_pt' translation='0.0085 1.2995 0.1147'> |
| 850 | <!-- HAnimSite visualization shape --> |
| 851 | <TouchSensor description='HAnimSite substernale'/> |
| 852 | <Shape USE='HAnimSiteShape'/> |
| 853 | </HAnimSite> |
| 854 | </HAnimSegment> |
| 855 | |
| 856 | |
| 857 | <!-- <HAnimJoint name='vt9'/> visualization sphere is placed within <HAnimSegment name='t9'/> --> |
| 858 | <TouchSensor description='HAnimJoint vt9, HAnimSegment t9'/> |
| 859 | <Transform translation='0.0057 1.3126 -0.0838'> |
| 860 | <Shape USE='HAnimJointShape'/> |
| 861 | </Transform> |
| 862 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt9'/> to <HAnimJoint name='vt8'/> --> |
| 863 | <Shape> |
| 864 | <LineSet vertexCount='2' containerField='geometry'> |
| 865 | <Coordinate point='0.0057 1.3126 -0.0838 0.0057 1.3382 -0.0845'/> |
| 866 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 867 | </LineSet> |
| 868 | </Shape> |
| 869 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='r_thelion'/> --> |
| 870 | <Shape> |
| 871 | <LineSet vertexCount='2' containerField='geometry'> |
| 872 | <Coordinate point='0.0057 1.3126 -0.0838 -0.0736 1.3385 0.1217'/> |
| 873 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 874 | </LineSet> |
| 875 | </Shape> |
| 876 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='l_thelion'/> --> |
| 877 | <Shape> |
| 878 | <LineSet vertexCount='2' containerField='geometry'> |
| 879 | <Coordinate point='0.0057 1.3126 -0.0838 0.0918 1.3382 0.1192'/> |
| 880 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 881 | </LineSet> |
| 882 | </Shape> |
| 883 |
<!-- HAnimSite
hanim_r_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_thelion_pt' name='r_thelion_pt' translation='-0.0736 1.3385 0.1217'> |
| 884 | <!-- HAnimSite visualization shape --> |
| 885 | <TouchSensor description='HAnimSite r_thelion'/> |
| 886 | <Shape USE='HAnimSiteShape'/> |
| 887 | </HAnimSite> |
| 888 |
<!-- HAnimSite
hanim_l_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_thelion_pt' name='l_thelion_pt' translation='0.0918 1.3382 0.1192'> |
| 889 | <!-- HAnimSite visualization shape --> |
| 890 | <TouchSensor description='HAnimSite l_thelion'/> |
| 891 | <Shape USE='HAnimSiteShape'/> |
| 892 | </HAnimSite> |
| 893 | </HAnimSegment> |
| 894 | |
| 895 | |
| 896 | <!-- <HAnimJoint name='vt8'/> visualization sphere is placed within <HAnimSegment name='t8'/> --> |
| 897 | <TouchSensor description='HAnimJoint vt8, HAnimSegment t8'/> |
| 898 | <Transform translation='0.0057 1.3382 -0.0845'> |
| 899 | <Shape USE='HAnimJointShape'/> |
| 900 | </Transform> |
| 901 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt8'/> to <HAnimJoint name='vt7'/> --> |
| 902 | <Shape> |
| 903 | <LineSet vertexCount='2' containerField='geometry'> |
| 904 | <Coordinate point='0.0057 1.3382 -0.0845 0.0058 1.3625 -0.0833'/> |
| 905 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 906 | </LineSet> |
| 907 | </Shape> |
| 908 | </HAnimSegment> |
| 909 | |
| 910 | |
| 911 | <!-- <HAnimJoint name='vt7'/> visualization sphere is placed within <HAnimSegment name='t7'/> --> |
| 912 | <TouchSensor description='HAnimJoint vt7, HAnimSegment t7'/> |
| 913 | <Transform translation='0.0058 1.3625 -0.0833'> |
| 914 | <Shape USE='HAnimJointShape'/> |
| 915 | </Transform> |
| 916 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt7'/> to <HAnimJoint name='vt6'/> --> |
| 917 | <Shape> |
| 918 | <LineSet vertexCount='2' containerField='geometry'> |
| 919 | <Coordinate point='0.0058 1.3625 -0.0833 0.0059 1.3866 -0.08'/> |
| 920 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 921 | </LineSet> |
| 922 | </Shape> |
| 923 | </HAnimSegment> |
| 924 | |
| 925 | |
| 926 | <!-- <HAnimJoint name='vt6'/> visualization sphere is placed within <HAnimSegment name='t6'/> --> |
| 927 | <TouchSensor description='HAnimJoint vt6, HAnimSegment t6'/> |
| 928 | <Transform translation='0.0059 1.3866 -0.08'> |
| 929 | <Shape USE='HAnimJointShape'/> |
| 930 | </Transform> |
| 931 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt6'/> to <HAnimJoint name='vt5'/> --> |
| 932 | <Shape> |
| 933 | <LineSet vertexCount='2' containerField='geometry'> |
| 934 | <Coordinate point='0.0059 1.3866 -0.08 0.006 1.4102 -0.0745'/> |
| 935 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 936 | </LineSet> |
| 937 | </Shape> |
| 938 | </HAnimSegment> |
| 939 | |
| 940 | |
| 941 | <!-- <HAnimJoint name='vt5'/> visualization sphere is placed within <HAnimSegment name='t5'/> --> |
| 942 | <TouchSensor description='HAnimJoint vt5, HAnimSegment t5'/> |
| 943 | <Transform translation='0.006 1.4102 -0.0745'> |
| 944 | <Shape USE='HAnimJointShape'/> |
| 945 | </Transform> |
| 946 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt5'/> to <HAnimJoint name='vt4'/> --> |
| 947 | <Shape> |
| 948 | <LineSet vertexCount='2' containerField='geometry'> |
| 949 | <Coordinate point='0.006 1.4102 -0.0745 0.0061 1.432 -0.0675'/> |
| 950 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 951 | </LineSet> |
| 952 | </Shape> |
| 953 | </HAnimSegment> |
| 954 | |
| 955 | |
| 956 | <!-- <HAnimJoint name='vt4'/> visualization sphere is placed within <HAnimSegment name='t4'/> --> |
| 957 | <TouchSensor description='HAnimJoint vt4, HAnimSegment t4'/> |
| 958 | <Transform translation='0.0061 1.432 -0.0675'> |
| 959 | <Shape USE='HAnimJointShape'/> |
| 960 | </Transform> |
| 961 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt4'/> to <HAnimJoint name='vt3'/> --> |
| 962 | <Shape> |
| 963 | <LineSet vertexCount='2' containerField='geometry'> |
| 964 | <Coordinate point='0.0061 1.432 -0.0675 0.0062 1.4583 -0.057'/> |
| 965 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 966 | </LineSet> |
| 967 | </Shape> |
| 968 | </HAnimSegment> |
| 969 | |
| 970 | |
| 971 | <!-- <HAnimJoint name='vt3'/> visualization sphere is placed within <HAnimSegment name='t3'/> --> |
| 972 | <TouchSensor description='HAnimJoint vt3, HAnimSegment t3'/> |
| 973 | <Transform translation='0.0062 1.4583 -0.057'> |
| 974 | <Shape USE='HAnimJointShape'/> |
| 975 | </Transform> |
| 976 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt3'/> to <HAnimJoint name='vt2'/> --> |
| 977 | <Shape> |
| 978 | <LineSet vertexCount='2' containerField='geometry'> |
| 979 | <Coordinate point='0.0062 1.4583 -0.057 0.0063 1.4761 -0.0484'/> |
| 980 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 981 | </LineSet> |
| 982 | </Shape> |
| 983 | </HAnimSegment> |
| 984 | |
| 985 | |
| 986 | <!-- <HAnimJoint name='vt2'/> visualization sphere is placed within <HAnimSegment name='t2'/> --> |
| 987 | <TouchSensor description='HAnimJoint vt2, HAnimSegment t2'/> |
| 988 | <Transform translation='0.0063 1.4761 -0.0484'> |
| 989 | <Shape USE='HAnimJointShape'/> |
| 990 | </Transform> |
| 991 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt2'/> to <HAnimJoint name='vt1'/> --> |
| 992 | <Shape> |
| 993 | <LineSet vertexCount='2' containerField='geometry'> |
| 994 | <Coordinate point='0.0063 1.4761 -0.0484 0.0065 1.4951 -0.0387'/> |
| 995 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 996 | </LineSet> |
| 997 | </Shape> |
| 998 | </HAnimSegment> |
| 999 | |
| 1000 | |
| 1001 | <!-- <HAnimJoint name='vt1'/> visualization sphere is placed within <HAnimSegment name='t1'/> --> |
| 1002 | <TouchSensor description='HAnimJoint vt1, HAnimSegment t1'/> |
| 1003 | <Transform translation='0.0065 1.4951 -0.0387'> |
| 1004 | <Shape USE='HAnimJointShape'/> |
| 1005 | </Transform> |
| 1006 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='vc7'/> --> |
| 1007 | <Shape> |
| 1008 | <LineSet vertexCount='2' containerField='geometry'> |
| 1009 | <Coordinate point='0.0065 1.4951 -0.0387 0.0066 1.5132 -0.0301'/> |
| 1010 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1011 | </LineSet> |
| 1012 | </Shape> |
| 1013 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='l_sternoclavicular'/> --> |
| 1014 | <Shape> |
| 1015 | <LineSet vertexCount='2' containerField='geometry'> |
| 1016 | <Coordinate point='0.0065 1.4951 -0.0387 0.082 1.4488 -0.0353'/> |
| 1017 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1018 | </LineSet> |
| 1019 | </Shape> |
| 1020 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='r_sternoclavicular'/> --> |
| 1021 | <Shape> |
| 1022 | <LineSet vertexCount='2' containerField='geometry'> |
| 1023 | <Coordinate point='0.0065 1.4951 -0.0387 -0.082 1.4488 -0.0353'/> |
| 1024 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1025 | </LineSet> |
| 1026 | </Shape> |
| 1027 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='suprasternale'/> --> |
| 1028 | <Shape> |
| 1029 | <LineSet vertexCount='2' containerField='geometry'> |
| 1030 | <Coordinate point='0.0065 1.4951 -0.0387 0.0084 1.4714 0.0551'/> |
| 1031 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1032 | </LineSet> |
| 1033 | </Shape> |
| 1034 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='cervicale'/> --> |
| 1035 | <Shape> |
| 1036 | <LineSet vertexCount='2' containerField='geometry'> |
| 1037 | <Coordinate point='0.0065 1.4951 -0.0387 0.0064 1.52 -0.0815'/> |
| 1038 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1039 | </LineSet> |
| 1040 | </Shape> |
| 1041 |
<!-- HAnimSite
hanim_suprasternale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_suprasternale_pt' name='suprasternale_pt' translation='0.0084 1.4714 0.0551'> |
| 1042 | <!-- HAnimSite visualization shape --> |
| 1043 | <TouchSensor description='HAnimSite suprasternale'/> |
| 1044 | <Shape USE='HAnimSiteShape'/> |
| 1045 | </HAnimSite> |
| 1046 |
<!-- HAnimSite
hanim_cervicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_cervicale_pt' name='cervicale_pt' translation='0.0064 1.52 -0.0815'> |
| 1047 | <!-- HAnimSite visualization shape --> |
| 1048 | <TouchSensor description='HAnimSite cervicale'/> |
| 1049 | <Shape USE='HAnimSiteShape'/> |
| 1050 | </HAnimSite> |
| 1051 | </HAnimSegment> |
| 1052 | |
| 1053 | |
| 1054 | <!-- <HAnimJoint name='vc7'/> visualization sphere is placed within <HAnimSegment name='c7'/> --> |
| 1055 | <TouchSensor description='HAnimJoint vc7, HAnimSegment c7'/> |
| 1056 | <Transform translation='0.0066 1.5132 -0.0301'> |
| 1057 | <Shape USE='HAnimJointShape'/> |
| 1058 | </Transform> |
| 1059 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc7'/> to <HAnimJoint name='vc6'/> --> |
| 1060 | <Shape> |
| 1061 | <LineSet vertexCount='2' containerField='geometry'> |
| 1062 | <Coordinate point='0.0066 1.5132 -0.0301 0.0066 1.5357 -0.0143'/> |
| 1063 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1064 | </LineSet> |
| 1065 | </Shape> |
| 1066 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='r_neck_base'/> --> |
| 1067 | <Shape> |
| 1068 | <LineSet vertexCount='2' containerField='geometry'> |
| 1069 | <Coordinate point='0.0066 1.5132 -0.0301 -0.0419 1.5149 -0.022'/> |
| 1070 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1071 | </LineSet> |
| 1072 | </Shape> |
| 1073 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='l_neck_base'/> --> |
| 1074 | <Shape> |
| 1075 | <LineSet vertexCount='2' containerField='geometry'> |
| 1076 | <Coordinate point='0.0066 1.5132 -0.0301 0.0646 1.5141 -0.038'/> |
| 1077 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1078 | </LineSet> |
| 1079 | </Shape> |
| 1080 |
<!-- HAnimSite
hanim_r_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_neck_base_pt' name='r_neck_base_pt' translation='-0.0419 1.5149 -0.022'> |
| 1081 | <!-- HAnimSite visualization shape --> |
| 1082 | <TouchSensor description='HAnimSite r_neck_base'/> |
| 1083 | <Shape USE='HAnimSiteShape'/> |
| 1084 | </HAnimSite> |
| 1085 |
<!-- HAnimSite
hanim_l_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_neck_base_pt' name='l_neck_base_pt' translation='0.0646 1.5141 -0.038'> |
| 1086 | <!-- HAnimSite visualization shape --> |
| 1087 | <TouchSensor description='HAnimSite l_neck_base'/> |
| 1088 | <Shape USE='HAnimSiteShape'/> |
| 1089 | </HAnimSite> |
| 1090 | </HAnimSegment> |
| 1091 | |
| 1092 | |
| 1093 | <!-- <HAnimJoint name='vc6'/> visualization sphere is placed within <HAnimSegment name='c6'/> --> |
| 1094 | <TouchSensor description='HAnimJoint vc6, HAnimSegment c6'/> |
| 1095 | <Transform translation='0.0066 1.5357 -0.0143'> |
| 1096 | <Shape USE='HAnimJointShape'/> |
| 1097 | </Transform> |
| 1098 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc6'/> to <HAnimJoint name='vc5'/> --> |
| 1099 | <Shape> |
| 1100 | <LineSet vertexCount='2' containerField='geometry'> |
| 1101 | <Coordinate point='0.0066 1.5357 -0.0143 0.0066 1.552 -0.0082'/> |
| 1102 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1103 | </LineSet> |
| 1104 | </Shape> |
| 1105 | </HAnimSegment> |
| 1106 | |
| 1107 | |
| 1108 | <!-- <HAnimJoint name='vc5'/> visualization sphere is placed within <HAnimSegment name='c5'/> --> |
| 1109 | <TouchSensor description='HAnimJoint vc5, HAnimSegment c5'/> |
| 1110 | <Transform translation='0.0066 1.552 -0.0082'> |
| 1111 | <Shape USE='HAnimJointShape'/> |
| 1112 | </Transform> |
| 1113 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc5'/> to <HAnimJoint name='vc4'/> --> |
| 1114 | <Shape> |
| 1115 | <LineSet vertexCount='2' containerField='geometry'> |
| 1116 | <Coordinate point='0.0066 1.552 -0.0082 0.0066 1.5662 -0.0084'/> |
| 1117 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1118 | </LineSet> |
| 1119 | </Shape> |
| 1120 | </HAnimSegment> |
| 1121 | |
| 1122 | |
| 1123 | <!-- <HAnimJoint name='vc4'/> visualization sphere is placed within <HAnimSegment name='c4'/> --> |
| 1124 | <TouchSensor description='HAnimJoint vc4, HAnimSegment c4'/> |
| 1125 | <Transform translation='0.0066 1.5662 -0.0084'> |
| 1126 | <Shape USE='HAnimJointShape'/> |
| 1127 | </Transform> |
| 1128 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc4'/> to <HAnimJoint name='vc3'/> --> |
| 1129 | <Shape> |
| 1130 | <LineSet vertexCount='2' containerField='geometry'> |
| 1131 | <Coordinate point='0.0066 1.5662 -0.0084 0.0066 1.58 -0.0103'/> |
| 1132 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1133 | </LineSet> |
| 1134 | </Shape> |
| 1135 | </HAnimSegment> |
| 1136 | |
| 1137 | |
| 1138 | <!-- <HAnimJoint name='vc3'/> visualization sphere is placed within <HAnimSegment name='c3'/> --> |
| 1139 | <TouchSensor description='HAnimJoint vc3, HAnimSegment c3'/> |
| 1140 | <Transform translation='0.0066 1.58 -0.0103'> |
| 1141 | <Shape USE='HAnimJointShape'/> |
| 1142 | </Transform> |
| 1143 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc3'/> to <HAnimJoint name='vc2'/> --> |
| 1144 | <Shape> |
| 1145 | <LineSet vertexCount='2' containerField='geometry'> |
| 1146 | <Coordinate point='0.0066 1.58 -0.0103 0.0066 1.5928 -0.0103'/> |
| 1147 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1148 | </LineSet> |
| 1149 | </Shape> |
| 1150 | </HAnimSegment> |
| 1151 | |
| 1152 | |
| 1153 | <!-- <HAnimJoint name='vc2'/> visualization sphere is placed within <HAnimSegment name='c2'/> --> |
| 1154 | <TouchSensor description='HAnimJoint vc2, HAnimSegment c2'/> |
| 1155 | <Transform translation='0.0066 1.5928 -0.0103'> |
| 1156 | <Shape USE='HAnimJointShape'/> |
| 1157 | </Transform> |
| 1158 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc2'/> to <HAnimJoint name='vc1'/> --> |
| 1159 | <Shape> |
| 1160 | <LineSet vertexCount='2' containerField='geometry'> |
| 1161 | <Coordinate point='0.0066 1.5928 -0.0103 0.0066 1.6144 -0.0034'/> |
| 1162 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1163 | </LineSet> |
| 1164 | </Shape> |
| 1165 | </HAnimSegment> |
| 1166 | |
| 1167 | |
| 1168 | <!-- <HAnimJoint name='vc1'/> visualization sphere is placed within <HAnimSegment name='c1'/> --> |
| 1169 | <TouchSensor description='HAnimJoint vc1, HAnimSegment c1'/> |
| 1170 | <Transform translation='0.0066 1.6144 -0.0034'> |
| 1171 | <Shape USE='HAnimJointShape'/> |
| 1172 | </Transform> |
| 1173 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc1'/> to <HAnimJoint name='skullbase'/> --> |
| 1174 | <Shape> |
| 1175 | <LineSet vertexCount='2' containerField='geometry'> |
| 1176 | <Coordinate point='0.0066 1.6144 -0.0034 0.0044 1.6209 0.0236'/> |
| 1177 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1178 | </LineSet> |
| 1179 | </Shape> |
| 1180 | </HAnimSegment> |
| 1181 |
<!-- HAnimJoint
hanim_skullbase is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_skullbase' center='0.0044 1.6209 0.0236' name='skullbase'> |
| 1182 |
<!-- HAnimSegment
hanim_skull is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_skull' name='skull'> |
| 1183 | <!-- <HAnimJoint name='skullbase'/> visualization sphere is placed within <HAnimSegment name='skull'/> --> |
| 1184 | <TouchSensor description='HAnimJoint skullbase, HAnimSegment skull'/> |
| 1185 | <Transform translation='0.0044 1.6209 0.0236'> |
| 1186 | <Shape USE='HAnimJointShape'/> |
| 1187 | </Transform> |
| 1188 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyeball_joint'/> --> |
| 1189 | <Shape> |
| 1190 | <LineSet vertexCount='2' containerField='geometry'> |
| 1191 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.6332 0.0502'/> |
| 1192 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1193 | </LineSet> |
| 1194 | </Shape> |
| 1195 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyelid_joint'/> --> |
| 1196 | <Shape> |
| 1197 | <LineSet vertexCount='2' containerField='geometry'> |
| 1198 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.6332 0.0502'/> |
| 1199 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1200 | </LineSet> |
| 1201 | </Shape> |
| 1202 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyebrow_joint'/> --> |
| 1203 | <Shape> |
| 1204 | <LineSet vertexCount='2' containerField='geometry'> |
| 1205 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.635 0.0506'/> |
| 1206 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1207 | </LineSet> |
| 1208 | </Shape> |
| 1209 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyeball_joint'/> --> |
| 1210 | <Shape> |
| 1211 | <LineSet vertexCount='2' containerField='geometry'> |
| 1212 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.6332 0.0502'/> |
| 1213 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1214 | </LineSet> |
| 1215 | </Shape> |
| 1216 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyelid_joint'/> --> |
| 1217 | <Shape> |
| 1218 | <LineSet vertexCount='2' containerField='geometry'> |
| 1219 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.6332 0.0502'/> |
| 1220 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1221 | </LineSet> |
| 1222 | </Shape> |
| 1223 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyebrow_joint'/> --> |
| 1224 | <Shape> |
| 1225 | <LineSet vertexCount='2' containerField='geometry'> |
| 1226 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.635 0.0506'/> |
| 1227 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1228 | </LineSet> |
| 1229 | </Shape> |
| 1230 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='temporomandibular'/> --> |
| 1231 | <Shape> |
| 1232 | <LineSet vertexCount='2' containerField='geometry'> |
| 1233 | <Coordinate point='0.0044 1.6209 0.0236 0 1.63 0.015'/> |
| 1234 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1235 | </LineSet> |
| 1236 | </Shape> |
| 1237 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='skull_tip'/> --> |
| 1238 | <Shape> |
| 1239 | <LineSet vertexCount='2' containerField='geometry'> |
| 1240 | <Coordinate point='0.0044 1.6209 0.0236 0.005 1.7504 0.0055'/> |
| 1241 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1242 | </LineSet> |
| 1243 | </Shape> |
| 1244 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='sellion'/> --> |
| 1245 | <Shape> |
| 1246 | <LineSet vertexCount='2' containerField='geometry'> |
| 1247 | <Coordinate point='0.0044 1.6209 0.0236 0.0058 1.6316 0.0852'/> |
| 1248 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1249 | </LineSet> |
| 1250 | </Shape> |
| 1251 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_infraorbitale'/> --> |
| 1252 | <Shape> |
| 1253 | <LineSet vertexCount='2' containerField='geometry'> |
| 1254 | <Coordinate point='0.0044 1.6209 0.0236 -0.0237 1.6171 0.0752'/> |
| 1255 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1256 | </LineSet> |
| 1257 | </Shape> |
| 1258 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_infraorbitale'/> --> |
| 1259 | <Shape> |
| 1260 | <LineSet vertexCount='2' containerField='geometry'> |
| 1261 | <Coordinate point='0.0044 1.6209 0.0236 0.0341 1.6171 0.0752'/> |
| 1262 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1263 | </LineSet> |
| 1264 | </Shape> |
| 1265 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='supramenton'/> --> |
| 1266 | <Shape> |
| 1267 | <LineSet vertexCount='2' containerField='geometry'> |
| 1268 | <Coordinate point='0.0044 1.6209 0.0236 0.0061 1.541 0.0805'/> |
| 1269 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1270 | </LineSet> |
| 1271 | </Shape> |
| 1272 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_tragion'/> --> |
| 1273 | <Shape> |
| 1274 | <LineSet vertexCount='2' containerField='geometry'> |
| 1275 | <Coordinate point='0.0044 1.6209 0.0236 -0.0646 1.6347 0.0302'/> |
| 1276 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1277 | </LineSet> |
| 1278 | </Shape> |
| 1279 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_gonion'/> --> |
| 1280 | <Shape> |
| 1281 | <LineSet vertexCount='2' containerField='geometry'> |
| 1282 | <Coordinate point='0.0044 1.6209 0.0236 -0.052 1.5529 0.0347'/> |
| 1283 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1284 | </LineSet> |
| 1285 | </Shape> |
| 1286 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_tragion'/> --> |
| 1287 | <Shape> |
| 1288 | <LineSet vertexCount='2' containerField='geometry'> |
| 1289 | <Coordinate point='0.0044 1.6209 0.0236 0.0739 1.6348 0.0282'/> |
| 1290 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1291 | </LineSet> |
| 1292 | </Shape> |
| 1293 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_gonion'/> --> |
| 1294 | <Shape> |
| 1295 | <LineSet vertexCount='2' containerField='geometry'> |
| 1296 | <Coordinate point='0.0044 1.6209 0.0236 0.0631 1.553 0.033'/> |
| 1297 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1298 | </LineSet> |
| 1299 | </Shape> |
| 1300 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='nuchale'/> --> |
| 1301 | <Shape> |
| 1302 | <LineSet vertexCount='2' containerField='geometry'> |
| 1303 | <Coordinate point='0.0044 1.6209 0.0236 0.0039 1.5972 -0.0796'/> |
| 1304 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1305 | </LineSet> |
| 1306 | </Shape> |
| 1307 |
<!-- HAnimSite
hanim_skull_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_skull_tip' name='skull_tip' translation='0.005 1.7504 0.0055'> |
| 1308 | <!-- TODO move skull_tip x to zero, check others for symmetry --> |
| 1309 | <!-- HAnimSite visualization shape --> |
| 1310 | <TouchSensor description='HAnimSite skull_tip'/> |
| 1311 | <Shape USE='HAnimSiteShape'/> |
| 1312 | </HAnimSite> |
| 1313 |
<!-- HAnimSite
hanim_sellion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_sellion_pt' name='sellion_pt' translation='0.0058 1.6316 0.0852'> |
| 1314 | <!-- HAnimSite visualization shape --> |
| 1315 | <TouchSensor description='HAnimSite sellion'/> |
| 1316 | <Shape USE='HAnimSiteShape'/> |
| 1317 | </HAnimSite> |
| 1318 |
<!-- HAnimSite
hanim_r_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt' translation='-0.0237 1.6171 0.0752'> |
| 1319 | <!-- HAnimSite visualization shape --> |
| 1320 | <TouchSensor description='HAnimSite r_infraorbitale'/> |
| 1321 | <Shape USE='HAnimSiteShape'/> |
| 1322 | </HAnimSite> |
| 1323 |
<!-- HAnimSite
hanim_l_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt' translation='0.0341 1.6171 0.0752'> |
| 1324 | <!-- HAnimSite visualization shape --> |
| 1325 | <TouchSensor description='HAnimSite l_infraorbitale'/> |
| 1326 | <Shape USE='HAnimSiteShape'/> |
| 1327 | </HAnimSite> |
| 1328 |
<!-- HAnimSite
hanim_supramenton_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_supramenton_pt' name='supramenton_pt' translation='0.0061 1.541 0.0805'> |
| 1329 | <!-- HAnimSite visualization shape --> |
| 1330 | <TouchSensor description='HAnimSite supramenton'/> |
| 1331 | <Shape USE='HAnimSiteShape'/> |
| 1332 | </HAnimSite> |
| 1333 |
<!-- HAnimSite
hanim_r_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_tragion_pt' name='r_tragion_pt' translation='-0.0646 1.6347 0.0302'> |
| 1334 | <!-- HAnimSite visualization shape --> |
| 1335 | <TouchSensor description='HAnimSite r_tragion'/> |
| 1336 | <Shape USE='HAnimSiteShape'/> |
| 1337 | </HAnimSite> |
| 1338 |
<!-- HAnimSite
hanim_r_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_gonion_pt' name='r_gonion_pt' translation='-0.052 1.5529 0.0347'> |
| 1339 | <!-- HAnimSite visualization shape --> |
| 1340 | <TouchSensor description='HAnimSite r_gonion'/> |
| 1341 | <Shape USE='HAnimSiteShape'/> |
| 1342 | </HAnimSite> |
| 1343 |
<!-- HAnimSite
hanim_l_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_tragion_pt' name='l_tragion_pt' translation='0.0739 1.6348 0.0282'> |
| 1344 | <!-- HAnimSite visualization shape --> |
| 1345 | <TouchSensor description='HAnimSite l_tragion'/> |
| 1346 | <Shape USE='HAnimSiteShape'/> |
| 1347 | </HAnimSite> |
| 1348 |
<!-- HAnimSite
hanim_l_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_gonion_pt' name='l_gonion_pt' translation='0.0631 1.553 0.033'> |
| 1349 | <!-- HAnimSite visualization shape --> |
| 1350 | <TouchSensor description='HAnimSite l_gonion'/> |
| 1351 | <Shape USE='HAnimSiteShape'/> |
| 1352 | </HAnimSite> |
| 1353 |
<!-- HAnimSite
hanim_nuchale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_nuchale_pt' name='nuchale_pt' translation='0.0039 1.5972 -0.0796'> |
| 1354 | <!-- HAnimSite visualization shape --> |
| 1355 | <TouchSensor description='HAnimSite nuchale'/> |
| 1356 | <Shape USE='HAnimSiteShape'/> |
| 1357 | </HAnimSite> |
| 1358 | </HAnimSegment> |
| 1359 |
<!-- HAnimJoint
hanim_l_eyeball_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_eyeball_joint' center='0.0336 1.6332 0.0502' name='l_eyeball_joint'> |
| 1360 |
<!-- HAnimSegment
hanim_l_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyeball' name='l_eyeball'> |
| 1361 | <!-- <HAnimJoint name='l_eyeball_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyeball'/> --> |
| 1362 | <TouchSensor description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball'/> |
| 1363 | <Transform translation='0.0336 1.6332 0.0502'> |
| 1364 | <Shape USE='HAnimJointShape'/> |
| 1365 | </Transform> |
| 1366 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_eyeball_joint'/> to <HAnimSite name='l_eyeball_site_view'/> --> |
| 1367 | <Shape> |
| 1368 | <LineSet vertexCount='2' containerField='geometry'> |
| 1369 | <Coordinate point='0.0336 1.6332 0.0502 0.034 1.64 0.05'/> |
| 1370 |
<!-- ColorRGBA
HAnimSiteViewpointLineColorRGBA is a DEF node that has 3 USE nodes: USE_1, USE_2, USE_3 --> <ColorRGBA DEF='HAnimSiteViewpointLineColorRGBA' color='0 0 1 1 0 0 1 0.1'/> |
| 1371 | </LineSet> |
| 1372 | </Shape> |
| 1373 |
<!-- HAnimSite
hanim_l_eyeball_site_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_eyeball_site_view' name='l_eyeball_site_view' translation='0.034 1.64 0.05'> |
| 1374 | <!-- HAnimSite visualization shape --> |
| 1375 | <TouchSensor description='HAnimSite l_eyeball_site_view'/> |
| 1376 | <Shape USE='HAnimSiteShape'/> |
| 1377 | <Viewpoint DEF='hanim_l_eyeball_site_viewpoint' description='l_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 1378 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1379 | <Anchor description='HAnimSite hanim_l_eyeball_site_view Viewpoint' url=' "#hanim_l_eyeball_site_viewpoint" '> |
| 1380 | <LOD forceTransitions='true' range='0.04'> |
| 1381 | <WorldInfo info='"hide diamond when close"'/> |
| 1382 | |
| 1383 | <IndexedFaceSet DEF='SiteViewpointDiamondIFS' creaseAngle='0.5' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 1384 | <Coordinate point='0 0.01 0 -0.01 0 0 0 0 0.01 0.01 0 0 0 0 -0.01 0 -0.01 0'/> |
| 1385 | </IndexedFaceSet> |
| 1386 | <Appearance> |
| 1387 | <Material diffuseColor='0 0 1' transparency='0.6'/> |
| 1388 | </Appearance> |
| 1389 | </Shape> |
| 1390 | </LOD> |
| 1391 | </Anchor> |
| 1392 | </HAnimSite> |
| 1393 | </HAnimSegment> |
| 1394 | </HAnimJoint> |
| 1395 |
<!-- HAnimJoint
hanim_l_eyelid_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_eyelid_joint' center='0.0336 1.6332 0.0502' name='l_eyelid_joint'> |
| 1396 |
<!-- HAnimSegment
hanim_l_eyelid is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyelid' name='l_eyelid'> |
| 1397 | <!-- <HAnimJoint name='l_eyelid_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyelid'/> --> |
| 1398 | <TouchSensor description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid'/> |
| 1399 | <Transform translation='0.0336 1.6332 0.0502'> |
| 1400 | <Shape USE='HAnimJointShape'/> |
| 1401 | </Transform> |
| 1402 | </HAnimSegment> |
| 1403 | </HAnimJoint> |
| 1404 |
<!-- HAnimJoint
hanim_l_eyebrow_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_eyebrow_joint' center='0.0336 1.635 0.0506' name='l_eyebrow_joint'> |
| 1405 |
<!-- HAnimSegment
hanim_l_eyebrow is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyebrow' name='l_eyebrow'> |
| 1406 | <!-- <HAnimJoint name='l_eyebrow_joint'/> visualization sphere is placed within <HAnimSegment name='l_eyebrow'/> --> |
| 1407 | <TouchSensor description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow'/> |
| 1408 | <Transform translation='0.0336 1.635 0.0506'> |
| 1409 | <Shape USE='HAnimJointShape'/> |
| 1410 | </Transform> |
| 1411 | </HAnimSegment> |
| 1412 | </HAnimJoint> |
| 1413 |
<!-- HAnimJoint
hanim_r_eyeball_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_eyeball_joint' center='-0.0336 1.6332 0.0502' name='r_eyeball_joint'> |
| 1414 |
<!-- HAnimSegment
hanim_r_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyeball' name='r_eyeball'> |
| 1415 | <!-- <HAnimJoint name='r_eyeball_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyeball'/> --> |
| 1416 | <TouchSensor description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball'/> |
| 1417 | <Transform translation='-0.0336 1.6332 0.0502'> |
| 1418 | <Shape USE='HAnimJointShape'/> |
| 1419 | </Transform> |
| 1420 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_eyeball_joint'/> to <HAnimSite name='r_eyeball_site_view'/> --> |
| 1421 | <Shape> |
| 1422 | <LineSet vertexCount='2' containerField='geometry'> |
| 1423 | <Coordinate point='-0.0336 1.6332 0.0502 -0.034 1.64 0.05'/> |
| 1424 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 1425 | </LineSet> |
| 1426 | </Shape> |
| 1427 |
<!-- HAnimSite
hanim_r_eyeball_site_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_eyeball_site_view' name='r_eyeball_site_view' translation='-0.034 1.64 0.05'> |
| 1428 | <!-- HAnimSite visualization shape --> |
| 1429 | <TouchSensor description='HAnimSite r_eyeball_site_view'/> |
| 1430 | <Shape USE='HAnimSiteShape'/> |
| 1431 | <Viewpoint DEF='hanim_r_eyeball_site_viewpoint' description='r_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 1432 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1433 | <Anchor description='HAnimSite hanim_r_eyeball_site_view Viewpoint' url=' "#hanim_r_eyeball_site_viewpoint" '> |
| 1434 | <LOD forceTransitions='true' range='0.04'> |
| 1435 | <WorldInfo info='"hide diamond when close"'/> |
| 1436 | <Shape USE='HAnimSiteViewpointShape'/> |
| 1437 | </LOD> |
| 1438 | </Anchor> |
| 1439 | </HAnimSite> |
| 1440 | </HAnimSegment> |
| 1441 | </HAnimJoint> |
| 1442 |
<!-- HAnimJoint
hanim_r_eyelid_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_eyelid_joint' center='-0.0336 1.6332 0.0502' name='r_eyelid_joint'> |
| 1443 |
<!-- HAnimSegment
hanim_r_eyelid is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyelid' name='r_eyelid'> |
| 1444 | <!-- <HAnimJoint name='r_eyelid_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyelid'/> --> |
| 1445 | <TouchSensor description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid'/> |
| 1446 | <Transform translation='-0.0336 1.6332 0.0502'> |
| 1447 | <Shape USE='HAnimJointShape'/> |
| 1448 | </Transform> |
| 1449 | </HAnimSegment> |
| 1450 | </HAnimJoint> |
| 1451 |
<!-- HAnimJoint
hanim_r_eyebrow_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_eyebrow_joint' center='-0.0336 1.635 0.0506' name='r_eyebrow_joint'> |
| 1452 |
<!-- HAnimSegment
hanim_r_eyebrow is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyebrow' name='r_eyebrow'> |
| 1453 | <!-- <HAnimJoint name='r_eyebrow_joint'/> visualization sphere is placed within <HAnimSegment name='r_eyebrow'/> --> |
| 1454 | <TouchSensor description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow'/> |
| 1455 | <Transform translation='-0.0336 1.635 0.0506'> |
| 1456 | <Shape USE='HAnimJointShape'/> |
| 1457 | </Transform> |
| 1458 | </HAnimSegment> |
| 1459 | </HAnimJoint> |
| 1460 |
<!-- HAnimJoint
hanim_temporomandibular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_temporomandibular' center='0 1.63 0.015' name='temporomandibular'> |
| 1461 | <!-- Single joint, single segment for jaw, two sites for left/right TMJs https://en.wikipedia.org/wiki/Temporomandibular_joint --> |
| 1462 | |
| 1463 | <!-- <HAnimJoint name='temporomandibular'/> visualization sphere is placed within <HAnimSegment name='jaw'/> --> |
| 1464 | <TouchSensor description='HAnimJoint temporomandibular, HAnimSegment jaw'/> |
| 1465 | <Transform translation='0 1.63 0.015'> |
| 1466 | <Shape USE='HAnimJointShape'/> |
| 1467 | </Transform> |
| 1468 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_l_site'/> --> |
| 1469 | <Shape> |
| 1470 | <LineSet vertexCount='2' containerField='geometry'> |
| 1471 | <Coordinate point='0 1.63 0.015 0.045 1.63 0'/> |
| 1472 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1473 | </LineSet> |
| 1474 | </Shape> |
| 1475 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_r_site'/> --> |
| 1476 | <Shape> |
| 1477 | <LineSet vertexCount='2' containerField='geometry'> |
| 1478 | <Coordinate point='0 1.63 0.015 -0.045 1.63 0'/> |
| 1479 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1480 | </LineSet> |
| 1481 | </Shape> |
| 1482 |
<!-- HAnimSite
hanim_temporomandibular_l_site_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_temporomandibular_l_site_pt' name='temporomandibular_l_site_pt' translation='0.045 1.63 0'> |
| 1483 | <!-- HAnimSite visualization shape --> |
| 1484 | <TouchSensor description='HAnimSite temporomandibular_l_site'/> |
| 1485 | <Shape USE='HAnimSiteShape'/> |
| 1486 | </HAnimSite> |
| 1487 |
<!-- HAnimSite
hanim_temporomandibular_r_site_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_temporomandibular_r_site_pt' name='temporomandibular_r_site_pt' translation='-0.045 1.63 0'> |
| 1488 | <!-- HAnimSite visualization shape --> |
| 1489 | <TouchSensor description='HAnimSite temporomandibular_r_site'/> |
| 1490 | <Shape USE='HAnimSiteShape'/> |
| 1491 | </HAnimSite> |
| 1492 | </HAnimSegment> |
| 1493 | </HAnimJoint> |
| 1494 | </HAnimJoint> |
| 1495 | </HAnimJoint> |
| 1496 | </HAnimJoint> |
| 1497 | </HAnimJoint> |
| 1498 | </HAnimJoint> |
| 1499 | </HAnimJoint> |
| 1500 | </HAnimJoint> |
| 1501 | </HAnimJoint> |
| 1502 |
<!-- HAnimJoint
hanim_l_sternoclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_sternoclavicular' center='0.082 1.4488 -0.0353' name='l_sternoclavicular'> |
| 1503 |
<!-- HAnimSegment
hanim_l_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_clavicle' name='l_clavicle'> |
| 1504 | <!-- <HAnimJoint name='l_sternoclavicular'/> visualization sphere is placed within <HAnimSegment name='l_clavicle'/> --> |
| 1505 | <TouchSensor description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle'/> |
| 1506 | <Transform translation='0.082 1.4488 -0.0353'> |
| 1507 | <Shape USE='HAnimJointShape'/> |
| 1508 | </Transform> |
| 1509 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_sternoclavicular'/> to <HAnimJoint name='l_acromioclavicular'/> --> |
| 1510 | <Shape> |
| 1511 | <LineSet vertexCount='2' containerField='geometry'> |
| 1512 | <Coordinate point='0.082 1.4488 -0.0353 0.0962 1.4269 -0.0424'/> |
| 1513 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1514 | </LineSet> |
| 1515 | </Shape> |
| 1516 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_clavicale'/> --> |
| 1517 | <Shape> |
| 1518 | <LineSet vertexCount='2' containerField='geometry'> |
| 1519 | <Coordinate point='0.082 1.4488 -0.0353 0.0271 1.4943 0.0394'/> |
| 1520 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1521 | </LineSet> |
| 1522 | </Shape> |
| 1523 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_acromion'/> --> |
| 1524 | <Shape> |
| 1525 | <LineSet vertexCount='2' containerField='geometry'> |
| 1526 | <Coordinate point='0.082 1.4488 -0.0353 0.2032 1.476 -0.049'/> |
| 1527 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1528 | </LineSet> |
| 1529 | </Shape> |
| 1530 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_ant'/> --> |
| 1531 | <Shape> |
| 1532 | <LineSet vertexCount='2' containerField='geometry'> |
| 1533 | <Coordinate point='0.082 1.4488 -0.0353 0.1777 1.4065 -0.0075'/> |
| 1534 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1535 | </LineSet> |
| 1536 | </Shape> |
| 1537 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_post'/> --> |
| 1538 | <Shape> |
| 1539 | <LineSet vertexCount='2' containerField='geometry'> |
| 1540 | <Coordinate point='0.082 1.4488 -0.0353 0.1706 1.4072 -0.0875'/> |
| 1541 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1542 | </LineSet> |
| 1543 | </Shape> |
| 1544 |
<!-- HAnimSite
hanim_l_clavicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_clavicale_pt' name='l_clavicale_pt' translation='0.0271 1.4943 0.0394'> |
| 1545 | <!-- HAnimSite visualization shape --> |
| 1546 | <TouchSensor description='HAnimSite l_clavicale'/> |
| 1547 | <Shape USE='HAnimSiteShape'/> |
| 1548 | </HAnimSite> |
| 1549 |
<!-- HAnimSite
hanim_l_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_acromion_pt' name='l_acromion_pt' translation='0.2032 1.476 -0.049'> |
| 1550 | <!-- HAnimSite visualization shape --> |
| 1551 | <TouchSensor description='HAnimSite l_acromion'/> |
| 1552 | <Shape USE='HAnimSiteShape'/> |
| 1553 | </HAnimSite> |
| 1554 |
<!-- HAnimSite
hanim_l_axilla_ant_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_axilla_ant_pt' name='l_axilla_ant_pt' translation='0.1777 1.4065 -0.0075'> |
| 1555 | <!-- HAnimSite visualization shape --> |
| 1556 | <TouchSensor description='HAnimSite l_axilla_ant'/> |
| 1557 | <Shape USE='HAnimSiteShape'/> |
| 1558 | </HAnimSite> |
| 1559 |
<!-- HAnimSite
hanim_l_axilla_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_axilla_post_pt' name='l_axilla_post_pt' translation='0.1706 1.4072 -0.0875'> |
| 1560 | <!-- HAnimSite visualization shape --> |
| 1561 | <TouchSensor description='HAnimSite l_axilla_post'/> |
| 1562 | <Shape USE='HAnimSiteShape'/> |
| 1563 | </HAnimSite> |
| 1564 | </HAnimSegment> |
| 1565 |
<!-- HAnimJoint
hanim_l_acromioclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_acromioclavicular' center='0.0962 1.4269 -0.0424' name='l_acromioclavicular'> |
| 1566 |
<!-- HAnimSegment
hanim_l_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_scapula' name='l_scapula'> |
| 1567 | <!-- <HAnimJoint name='l_acromioclavicular'/> visualization sphere is placed within <HAnimSegment name='l_scapula'/> --> |
| 1568 | <TouchSensor description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula'/> |
| 1569 | <Transform translation='0.0962 1.4269 -0.0424'> |
| 1570 | <Shape USE='HAnimJointShape'/> |
| 1571 | </Transform> |
| 1572 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_acromioclavicular'/> to <HAnimJoint name='l_shoulder'/> --> |
| 1573 | <Shape> |
| 1574 | <LineSet vertexCount='2' containerField='geometry'> |
| 1575 | <Coordinate point='0.0962 1.4269 -0.0424 0.2029 1.4376 -0.0387'/> |
| 1576 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1577 | </LineSet> |
| 1578 | </Shape> |
| 1579 | </HAnimSegment> |
| 1580 |
<!-- HAnimJoint
hanim_l_shoulder is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_shoulder' center='0.2029 1.4376 -0.0387' name='l_shoulder'> |
| 1581 |
<!-- HAnimSegment
hanim_l_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_upperarm' name='l_upperarm'> |
| 1582 | <!-- <HAnimJoint name='l_shoulder'/> visualization sphere is placed within <HAnimSegment name='l_upperarm'/> --> |
| 1583 | <TouchSensor description='HAnimJoint l_shoulder, HAnimSegment l_upperarm'/> |
| 1584 | <Transform translation='0.2029 1.4376 -0.0387'> |
| 1585 | <Shape USE='HAnimJointShape'/> |
| 1586 | </Transform> |
| 1587 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_shoulder'/> to <HAnimJoint name='l_elbow'/> --> |
| 1588 | <Shape> |
| 1589 | <LineSet vertexCount='2' containerField='geometry'> |
| 1590 | <Coordinate point='0.2029 1.4376 -0.0387 0.2014 1.1357 -0.0682'/> |
| 1591 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1592 | </LineSet> |
| 1593 | </Shape> |
| 1594 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_shoulder'/> to <HAnimSite name='l_humeral_lateral_epicn'/> --> |
| 1595 | <Shape> |
| 1596 | <LineSet vertexCount='2' containerField='geometry'> |
| 1597 | <Coordinate point='0.2029 1.4376 -0.0387 0.228 1.1482 -0.11'/> |
| 1598 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1599 | </LineSet> |
| 1600 | </Shape> |
| 1601 |
<!-- HAnimSite
hanim_l_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt' translation='0.228 1.1482 -0.11'> |
| 1602 | <!-- HAnimSite visualization shape --> |
| 1603 | <TouchSensor description='HAnimSite l_humeral_lateral_epicn'/> |
| 1604 | <Shape USE='HAnimSiteShape'/> |
| 1605 | </HAnimSite> |
| 1606 | </HAnimSegment> |
| 1607 |
<!-- HAnimJoint
hanim_l_elbow is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_elbow' center='0.2014 1.1357 -0.0682' name='l_elbow'> |
| 1608 |
<!-- HAnimSegment
hanim_l_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_forearm' name='l_forearm'> |
| 1609 | <!-- <HAnimJoint name='l_elbow'/> visualization sphere is placed within <HAnimSegment name='l_forearm'/> --> |
| 1610 | <TouchSensor description='HAnimJoint l_elbow, HAnimSegment l_forearm'/> |
| 1611 | <Transform translation='0.2014 1.1357 -0.0682'> |
| 1612 | <Shape USE='HAnimJointShape'/> |
| 1613 | </Transform> |
| 1614 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_elbow'/> to <HAnimJoint name='l_wrist'/> --> |
| 1615 | <Shape> |
| 1616 | <LineSet vertexCount='2' containerField='geometry'> |
| 1617 | <Coordinate point='0.2014 1.1357 -0.0682 0.1984 0.8663 -0.0583'/> |
| 1618 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1619 | </LineSet> |
| 1620 | </Shape> |
| 1621 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radial_styloid'/> --> |
| 1622 | <Shape> |
| 1623 | <LineSet vertexCount='2' containerField='geometry'> |
| 1624 | <Coordinate point='0.2014 1.1357 -0.0682 0.1901 0.8645 -0.0415'/> |
| 1625 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1626 | </LineSet> |
| 1627 | </Shape> |
| 1628 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_olecranon'/> --> |
| 1629 | <Shape> |
| 1630 | <LineSet vertexCount='2' containerField='geometry'> |
| 1631 | <Coordinate point='0.2014 1.1357 -0.0682 0.1962 1.1375 -0.1123'/> |
| 1632 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1633 | </LineSet> |
| 1634 | </Shape> |
| 1635 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_humeral_medial_epicn'/> --> |
| 1636 | <Shape> |
| 1637 | <LineSet vertexCount='2' containerField='geometry'> |
| 1638 | <Coordinate point='0.2014 1.1357 -0.0682 0.1735 1.1272 -0.1113'/> |
| 1639 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1640 | </LineSet> |
| 1641 | </Shape> |
| 1642 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radiale'/> --> |
| 1643 | <Shape> |
| 1644 | <LineSet vertexCount='2' containerField='geometry'> |
| 1645 | <Coordinate point='0.2014 1.1357 -0.0682 0.2182 1.1212 -0.1167'/> |
| 1646 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1647 | </LineSet> |
| 1648 | </Shape> |
| 1649 |
<!-- HAnimSite
hanim_l_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt' translation='0.1901 0.8645 -0.0415'> |
| 1650 | <!-- HAnimSite visualization shape --> |
| 1651 | <TouchSensor description='HAnimSite l_radial_styloid'/> |
| 1652 | <Shape USE='HAnimSiteShape'/> |
| 1653 | </HAnimSite> |
| 1654 |
<!-- HAnimSite
hanim_l_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_olecranon_pt' name='l_olecranon_pt' translation='0.1962 1.1375 -0.1123'> |
| 1655 | <!-- HAnimSite visualization shape --> |
| 1656 | <TouchSensor description='HAnimSite l_olecranon'/> |
| 1657 | <Shape USE='HAnimSiteShape'/> |
| 1658 | </HAnimSite> |
| 1659 |
<!-- HAnimSite
hanim_l_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt' translation='0.1735 1.1272 -0.1113'> |
| 1660 | <!-- HAnimSite visualization shape --> |
| 1661 | <TouchSensor description='HAnimSite l_humeral_medial_epicn'/> |
| 1662 | <Shape USE='HAnimSiteShape'/> |
| 1663 | </HAnimSite> |
| 1664 |
<!-- HAnimSite
hanim_l_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_radiale_pt' name='l_radiale_pt' translation='0.2182 1.1212 -0.1167'> |
| 1665 | <!-- HAnimSite visualization shape --> |
| 1666 | <TouchSensor description='HAnimSite l_radiale'/> |
| 1667 | <Shape USE='HAnimSiteShape'/> |
| 1668 | </HAnimSite> |
| 1669 | </HAnimSegment> |
| 1670 |
<!-- HAnimJoint
hanim_l_wrist is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_wrist' center='0.1984 0.8663 -0.0583' name='l_wrist'> |
| 1671 |
<!-- HAnimSegment
hanim_l_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hand' name='l_hand'> |
| 1672 | <!-- <HAnimJoint name='l_wrist'/> visualization sphere is placed within <HAnimSegment name='l_hand'/> --> |
| 1673 | <TouchSensor description='HAnimJoint l_wrist, HAnimSegment l_hand'/> |
| 1674 | <Transform translation='0.1984 0.8663 -0.0583'> |
| 1675 | <Shape USE='HAnimJointShape'/> |
| 1676 | </Transform> |
| 1677 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_thumb1'/> --> |
| 1678 | <Shape> |
| 1679 | <LineSet vertexCount='2' containerField='geometry'> |
| 1680 | <Coordinate point='0.1984 0.8663 -0.0583 0.1924 0.8472 -0.0534'/> |
| 1681 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1682 | </LineSet> |
| 1683 | </Shape> |
| 1684 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_index0'/> --> |
| 1685 | <Shape> |
| 1686 | <LineSet vertexCount='2' containerField='geometry'> |
| 1687 | <Coordinate point='0.1984 0.8663 -0.0583 0.1983 0.8024 -0.028'/> |
| 1688 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1689 | </LineSet> |
| 1690 | </Shape> |
| 1691 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_middle0'/> --> |
| 1692 | <Shape> |
| 1693 | <LineSet vertexCount='2' containerField='geometry'> |
| 1694 | <Coordinate point='0.1984 0.8663 -0.0583 0.1987 0.8029 -0.053'/> |
| 1695 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1696 | </LineSet> |
| 1697 | </Shape> |
| 1698 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_ring0'/> --> |
| 1699 | <Shape> |
| 1700 | <LineSet vertexCount='2' containerField='geometry'> |
| 1701 | <Coordinate point='0.1984 0.8663 -0.0583 0.1956 0.8019 -0.0794'/> |
| 1702 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1703 | </LineSet> |
| 1704 | </Shape> |
| 1705 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_pinky0'/> --> |
| 1706 | <Shape> |
| 1707 | <LineSet vertexCount='2' containerField='geometry'> |
| 1708 | <Coordinate point='0.1984 0.8663 -0.0583 0.1925 0.8066 -0.1036'/> |
| 1709 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1710 | </LineSet> |
| 1711 | </Shape> |
| 1712 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha2'/> --> |
| 1713 | <Shape> |
| 1714 | <LineSet vertexCount='2' containerField='geometry'> |
| 1715 | <Coordinate point='0.1984 0.8663 -0.0583 0.2009 0.8139 -0.0237'/> |
| 1716 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1717 | </LineSet> |
| 1718 | </Shape> |
| 1719 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_ulnar_styloid'/> --> |
| 1720 | <Shape> |
| 1721 | <LineSet vertexCount='2' containerField='geometry'> |
| 1722 | <Coordinate point='0.1984 0.8663 -0.0583 0.2142 0.8529 -0.0648'/> |
| 1723 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1724 | </LineSet> |
| 1725 | </Shape> |
| 1726 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha5'/> --> |
| 1727 | <Shape> |
| 1728 | <LineSet vertexCount='2' containerField='geometry'> |
| 1729 | <Coordinate point='0.1984 0.8663 -0.0583 0.1929 0.786 -0.1122'/> |
| 1730 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1731 | </LineSet> |
| 1732 | </Shape> |
| 1733 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_hand_front_view'/> --> |
| 1734 | <Shape> |
| 1735 | <LineSet vertexCount='2' containerField='geometry'> |
| 1736 | <Coordinate point='0.1984 0.8663 -0.0583 0.3 0.75 0.45'/> |
| 1737 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 1738 | </LineSet> |
| 1739 | </Shape> |
| 1740 |
<!-- HAnimSite
hanim_l_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt' translation='0.2009 0.8139 -0.0237'> |
| 1741 | <!-- HAnimSite visualization shape --> |
| 1742 | <TouchSensor description='HAnimSite l_metacarpal_pha2'/> |
| 1743 | <Shape USE='HAnimSiteShape'/> |
| 1744 | </HAnimSite> |
| 1745 |
<!-- HAnimSite
hanim_l_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt' translation='0.2142 0.8529 -0.0648'> |
| 1746 | <!-- HAnimSite visualization shape --> |
| 1747 | <TouchSensor description='HAnimSite l_ulnar_styloid'/> |
| 1748 | <Shape USE='HAnimSiteShape'/> |
| 1749 | </HAnimSite> |
| 1750 |
<!-- HAnimSite
hanim_l_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt' translation='0.1929 0.786 -0.1122'> |
| 1751 | <!-- HAnimSite visualization shape --> |
| 1752 | <TouchSensor description='HAnimSite l_metacarpal_pha5'/> |
| 1753 | <Shape USE='HAnimSiteShape'/> |
| 1754 | </HAnimSite> |
| 1755 |
<!-- HAnimSite
hanim_l_hand_front_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_hand_front_view' name='l_hand_front_view' translation='0.3 0.75 0.45'> |
| 1756 | <!-- HAnimSite visualization shape --> |
| 1757 | <TouchSensor description='HAnimSite l_hand_front_view'/> |
| 1758 | <Shape USE='HAnimSiteShape'/> |
| 1759 | <Viewpoint DEF='hanim_l_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='left hand front' position='0 0 0'/> |
| 1760 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1761 | <Anchor description='HAnimSite hanim_l_hand_front_view Viewpoint' url=' "#hanim_l_hand_front_viewpoint" '> |
| 1762 | <LOD forceTransitions='true' range='0.04'> |
| 1763 | <WorldInfo info='"hide diamond when close"'/> |
| 1764 | <Shape USE='HAnimSiteViewpointShape'/> |
| 1765 | </LOD> |
| 1766 | </Anchor> |
| 1767 | </HAnimSite> |
| 1768 | </HAnimSegment> |
| 1769 |
<!-- HAnimJoint
hanim_l_thumb1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_thumb1' center='0.1924 0.8472 -0.0534' name='l_thumb1'> |
| 1770 |
<!-- HAnimSegment
hanim_l_thumb_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_metacarpal' name='l_thumb_metacarpal'> |
| 1771 | <!-- <HAnimJoint name='l_thumb1'/> visualization sphere is placed within <HAnimSegment name='l_thumb_metacarpal'/> --> |
| 1772 | <TouchSensor description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal'/> |
| 1773 | <Transform translation='0.1924 0.8472 -0.0534'> |
| 1774 | <Shape USE='HAnimJointShape'/> |
| 1775 | </Transform> |
| 1776 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb1'/> to <HAnimJoint name='l_thumb2'/> --> |
| 1777 | <Shape> |
| 1778 | <LineSet vertexCount='2' containerField='geometry'> |
| 1779 | <Coordinate point='0.1924 0.8472 -0.0534 0.1951 0.8226 0.0246'/> |
| 1780 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1781 | </LineSet> |
| 1782 | </Shape> |
| 1783 | </HAnimSegment> |
| 1784 |
<!-- HAnimJoint
hanim_l_thumb2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_thumb2' center='0.1951 0.8226 0.0246' name='l_thumb2'> |
| 1785 |
<!-- HAnimSegment
hanim_l_thumb_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_proximal' name='l_thumb_proximal'> |
| 1786 | <!-- <HAnimJoint name='l_thumb2'/> visualization sphere is placed within <HAnimSegment name='l_thumb_proximal'/> --> |
| 1787 | <TouchSensor description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal'/> |
| 1788 | <Transform translation='0.1951 0.8226 0.0246'> |
| 1789 | <Shape USE='HAnimJointShape'/> |
| 1790 | </Transform> |
| 1791 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb2'/> to <HAnimJoint name='l_thumb3'/> --> |
| 1792 | <Shape> |
| 1793 | <LineSet vertexCount='2' containerField='geometry'> |
| 1794 | <Coordinate point='0.1951 0.8226 0.0246 0.1955 0.8159 0.0464'/> |
| 1795 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1796 | </LineSet> |
| 1797 | </Shape> |
| 1798 | </HAnimSegment> |
| 1799 |
<!-- HAnimJoint
hanim_l_thumb3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_thumb3' center='0.1955 0.8159 0.0464' name='l_thumb3'> |
| 1800 |
<!-- HAnimSegment
hanim_l_thumb_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_distal' name='l_thumb_distal'> |
| 1801 | <!-- <HAnimJoint name='l_thumb3'/> visualization sphere is placed within <HAnimSegment name='l_thumb_distal'/> --> |
| 1802 | <TouchSensor description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal'/> |
| 1803 | <Transform translation='0.1955 0.8159 0.0464'> |
| 1804 | <Shape USE='HAnimJointShape'/> |
| 1805 | </Transform> |
| 1806 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_thumb3'/> to <HAnimSite name='l_thumb_distal_tip'/> --> |
| 1807 | <Shape> |
| 1808 | <LineSet vertexCount='2' containerField='geometry'> |
| 1809 | <Coordinate point='0.1955 0.8159 0.0464 0.1982 0.8061 0.0759'/> |
| 1810 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1811 | </LineSet> |
| 1812 | </Shape> |
| 1813 |
<!-- HAnimSite
hanim_l_thumb_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_thumb_distal_tip' name='l_thumb_distal_tip' translation='0.1982 0.8061 0.0759'> |
| 1814 | <!-- HAnimSite visualization shape --> |
| 1815 | <TouchSensor description='HAnimSite l_thumb_distal_tip'/> |
| 1816 | <Shape USE='HAnimSiteShape'/> |
| 1817 | </HAnimSite> |
| 1818 | </HAnimSegment> |
| 1819 | </HAnimJoint> |
| 1820 | </HAnimJoint> |
| 1821 | </HAnimJoint> |
| 1822 |
<!-- HAnimJoint
hanim_l_index0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_index0' center='0.1983 0.8024 -0.028' name='l_index0'> |
| 1823 |
<!-- HAnimSegment
hanim_l_index_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_metacarpal' name='l_index_metacarpal'> |
| 1824 | <!-- <HAnimJoint name='l_index0'/> visualization sphere is placed within <HAnimSegment name='l_index_metacarpal'/> --> |
| 1825 | <TouchSensor description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal'/> |
| 1826 | <Transform translation='0.1983 0.8024 -0.028'> |
| 1827 | <Shape USE='HAnimJointShape'/> |
| 1828 | </Transform> |
| 1829 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index0'/> to <HAnimJoint name='l_index1'/> --> |
| 1830 | <Shape> |
| 1831 | <LineSet vertexCount='2' containerField='geometry'> |
| 1832 | <Coordinate point='0.1983 0.8024 -0.028 0.1983 0.7815 -0.028'/> |
| 1833 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1834 | </LineSet> |
| 1835 | </Shape> |
| 1836 | </HAnimSegment> |
| 1837 |
<!-- HAnimJoint
hanim_l_index1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_index1' center='0.1983 0.7815 -0.028' name='l_index1'> |
| 1838 |
<!-- HAnimSegment
hanim_l_index_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_proximal' name='l_index_proximal'> |
| 1839 | <!-- <HAnimJoint name='l_index1'/> visualization sphere is placed within <HAnimSegment name='l_index_proximal'/> --> |
| 1840 | <TouchSensor description='HAnimJoint l_index1, HAnimSegment l_index_proximal'/> |
| 1841 | <Transform translation='0.1983 0.7815 -0.028'> |
| 1842 | <Shape USE='HAnimJointShape'/> |
| 1843 | </Transform> |
| 1844 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index1'/> to <HAnimJoint name='l_index2'/> --> |
| 1845 | <Shape> |
| 1846 | <LineSet vertexCount='2' containerField='geometry'> |
| 1847 | <Coordinate point='0.1983 0.7815 -0.028 0.2017 0.7363 -0.0248'/> |
| 1848 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1849 | </LineSet> |
| 1850 | </Shape> |
| 1851 | </HAnimSegment> |
| 1852 |
<!-- HAnimJoint
hanim_l_index2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_index2' center='0.2017 0.7363 -0.0248' name='l_index2'> |
| 1853 |
<!-- HAnimSegment
hanim_l_index_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_middle' name='l_index_middle'> |
| 1854 | <!-- <HAnimJoint name='l_index2'/> visualization sphere is placed within <HAnimSegment name='l_index_middle'/> --> |
| 1855 | <TouchSensor description='HAnimJoint l_index2, HAnimSegment l_index_middle'/> |
| 1856 | <Transform translation='0.2017 0.7363 -0.0248'> |
| 1857 | <Shape USE='HAnimJointShape'/> |
| 1858 | </Transform> |
| 1859 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index2'/> to <HAnimJoint name='l_index3'/> --> |
| 1860 | <Shape> |
| 1861 | <LineSet vertexCount='2' containerField='geometry'> |
| 1862 | <Coordinate point='0.2017 0.7363 -0.0248 0.2028 0.7139 -0.0236'/> |
| 1863 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1864 | </LineSet> |
| 1865 | </Shape> |
| 1866 | </HAnimSegment> |
| 1867 |
<!-- HAnimJoint
hanim_l_index3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_index3' center='0.2028 0.7139 -0.0236' name='l_index3'> |
| 1868 |
<!-- HAnimSegment
hanim_l_index_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_distal' name='l_index_distal'> |
| 1869 | <!-- <HAnimJoint name='l_index3'/> visualization sphere is placed within <HAnimSegment name='l_index_distal'/> --> |
| 1870 | <TouchSensor description='HAnimJoint l_index3, HAnimSegment l_index_distal'/> |
| 1871 | <Transform translation='0.2028 0.7139 -0.0236'> |
| 1872 | <Shape USE='HAnimJointShape'/> |
| 1873 | </Transform> |
| 1874 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_index_distal_tip'/> --> |
| 1875 | <Shape> |
| 1876 | <LineSet vertexCount='2' containerField='geometry'> |
| 1877 | <Coordinate point='0.2028 0.7139 -0.0236 0.2089 0.6858 -0.0245'/> |
| 1878 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1879 | </LineSet> |
| 1880 | </Shape> |
| 1881 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_dactylion'/> --> |
| 1882 | <Shape> |
| 1883 | <LineSet vertexCount='2' containerField='geometry'> |
| 1884 | <Coordinate point='0.2028 0.7139 -0.0236 0.2056 0.6743 -0.0482'/> |
| 1885 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1886 | </LineSet> |
| 1887 | </Shape> |
| 1888 |
<!-- HAnimSite
hanim_l_index_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_index_distal_tip' name='l_index_distal_tip' translation='0.2089 0.6858 -0.0245'> |
| 1889 | <!-- HAnimSite visualization shape --> |
| 1890 | <TouchSensor description='HAnimSite l_index_distal_tip'/> |
| 1891 | <Shape USE='HAnimSiteShape'/> |
| 1892 | </HAnimSite> |
| 1893 |
<!-- HAnimSite
hanim_l_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_dactylion_pt' name='l_dactylion_pt' translation='0.2056 0.6743 -0.0482'> |
| 1894 | <!-- HAnimSite visualization shape --> |
| 1895 | <TouchSensor description='HAnimSite l_dactylion'/> |
| 1896 | <Shape USE='HAnimSiteShape'/> |
| 1897 | </HAnimSite> |
| 1898 | </HAnimSegment> |
| 1899 | </HAnimJoint> |
| 1900 | </HAnimJoint> |
| 1901 | </HAnimJoint> |
| 1902 | </HAnimJoint> |
| 1903 |
<!-- HAnimJoint
hanim_l_middle0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_middle0' center='0.1987 0.8029 -0.053' name='l_middle0'> |
| 1904 |
<!-- HAnimSegment
hanim_l_middle_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_metacarpal' name='l_middle_metacarpal'> |
| 1905 | <!-- <HAnimJoint name='l_middle0'/> visualization sphere is placed within <HAnimSegment name='l_middle_metacarpal'/> --> |
| 1906 | <TouchSensor description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal'/> |
| 1907 | <Transform translation='0.1987 0.8029 -0.053'> |
| 1908 | <Shape USE='HAnimJointShape'/> |
| 1909 | </Transform> |
| 1910 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle0'/> to <HAnimJoint name='l_middle1'/> --> |
| 1911 | <Shape> |
| 1912 | <LineSet vertexCount='2' containerField='geometry'> |
| 1913 | <Coordinate point='0.1987 0.8029 -0.053 0.1987 0.7818 -0.053'/> |
| 1914 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1915 | </LineSet> |
| 1916 | </Shape> |
| 1917 | </HAnimSegment> |
| 1918 |
<!-- HAnimJoint
hanim_l_middle1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_middle1' center='0.1987 0.7818 -0.053' name='l_middle1'> |
| 1919 |
<!-- HAnimSegment
hanim_l_middle_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_proximal' name='l_middle_proximal'> |
| 1920 | <!-- <HAnimJoint name='l_middle1'/> visualization sphere is placed within <HAnimSegment name='l_middle_proximal'/> --> |
| 1921 | <TouchSensor description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal'/> |
| 1922 | <Transform translation='0.1987 0.7818 -0.053'> |
| 1923 | <Shape USE='HAnimJointShape'/> |
| 1924 | </Transform> |
| 1925 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle1'/> to <HAnimJoint name='l_middle2'/> --> |
| 1926 | <Shape> |
| 1927 | <LineSet vertexCount='2' containerField='geometry'> |
| 1928 | <Coordinate point='0.1987 0.7818 -0.053 0.2013 0.7273 -0.0503'/> |
| 1929 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1930 | </LineSet> |
| 1931 | </Shape> |
| 1932 | </HAnimSegment> |
| 1933 |
<!-- HAnimJoint
hanim_l_middle2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_middle2' center='0.2013 0.7273 -0.0503' name='l_middle2'> |
| 1934 |
<!-- HAnimSegment
hanim_l_middle_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_middle' name='l_middle_middle'> |
| 1935 | <!-- <HAnimJoint name='l_middle2'/> visualization sphere is placed within <HAnimSegment name='l_middle_middle'/> --> |
| 1936 | <TouchSensor description='HAnimJoint l_middle2, HAnimSegment l_middle_middle'/> |
| 1937 | <Transform translation='0.2013 0.7273 -0.0503'> |
| 1938 | <Shape USE='HAnimJointShape'/> |
| 1939 | </Transform> |
| 1940 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle2'/> to <HAnimJoint name='l_middle3'/> --> |
| 1941 | <Shape> |
| 1942 | <LineSet vertexCount='2' containerField='geometry'> |
| 1943 | <Coordinate point='0.2013 0.7273 -0.0503 0.2026 0.7011 -0.0494'/> |
| 1944 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1945 | </LineSet> |
| 1946 | </Shape> |
| 1947 | </HAnimSegment> |
| 1948 |
<!-- HAnimJoint
hanim_l_middle3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_middle3' center='0.2026 0.7011 -0.0494' name='l_middle3'> |
| 1949 |
<!-- HAnimSegment
hanim_l_middle_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_distal' name='l_middle_distal'> |
| 1950 | <!-- <HAnimJoint name='l_middle3'/> visualization sphere is placed within <HAnimSegment name='l_middle_distal'/> --> |
| 1951 | <TouchSensor description='HAnimJoint l_middle3, HAnimSegment l_middle_distal'/> |
| 1952 | <Transform translation='0.2026 0.7011 -0.0494'> |
| 1953 | <Shape USE='HAnimJointShape'/> |
| 1954 | </Transform> |
| 1955 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_middle3'/> to <HAnimSite name='l_middle_distal_tip'/> --> |
| 1956 | <Shape> |
| 1957 | <LineSet vertexCount='2' containerField='geometry'> |
| 1958 | <Coordinate point='0.2026 0.7011 -0.0494 0.208 0.6731 -0.0491'/> |
| 1959 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1960 | </LineSet> |
| 1961 | </Shape> |
| 1962 |
<!-- HAnimSite
hanim_l_middle_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_middle_distal_tip' name='l_middle_distal_tip' translation='0.208 0.6731 -0.0491'> |
| 1963 | <!-- HAnimSite visualization shape --> |
| 1964 | <TouchSensor description='HAnimSite l_middle_distal_tip'/> |
| 1965 | <Shape USE='HAnimSiteShape'/> |
| 1966 | </HAnimSite> |
| 1967 | </HAnimSegment> |
| 1968 | </HAnimJoint> |
| 1969 | </HAnimJoint> |
| 1970 | </HAnimJoint> |
| 1971 | </HAnimJoint> |
| 1972 |
<!-- HAnimJoint
hanim_l_ring0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ring0' center='0.1956 0.8019 -0.0794' name='l_ring0'> |
| 1973 |
<!-- HAnimSegment
hanim_l_ring_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_metacarpal' name='l_ring_metacarpal'> |
| 1974 | <!-- <HAnimJoint name='l_ring0'/> visualization sphere is placed within <HAnimSegment name='l_ring_metacarpal'/> --> |
| 1975 | <TouchSensor description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal'/> |
| 1976 | <Transform translation='0.1956 0.8019 -0.0794'> |
| 1977 | <Shape USE='HAnimJointShape'/> |
| 1978 | </Transform> |
| 1979 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring0'/> to <HAnimJoint name='l_ring1'/> --> |
| 1980 | <Shape> |
| 1981 | <LineSet vertexCount='2' containerField='geometry'> |
| 1982 | <Coordinate point='0.1956 0.8019 -0.0794 0.1956 0.7815 -0.0794'/> |
| 1983 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1984 | </LineSet> |
| 1985 | </Shape> |
| 1986 | </HAnimSegment> |
| 1987 |
<!-- HAnimJoint
hanim_l_ring1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ring1' center='0.1956 0.7815 -0.0794' name='l_ring1'> |
| 1988 |
<!-- HAnimSegment
hanim_l_ring_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_proximal' name='l_ring_proximal'> |
| 1989 | <!-- <HAnimJoint name='l_ring1'/> visualization sphere is placed within <HAnimSegment name='l_ring_proximal'/> --> |
| 1990 | <TouchSensor description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal'/> |
| 1991 | <Transform translation='0.1956 0.7815 -0.0794'> |
| 1992 | <Shape USE='HAnimJointShape'/> |
| 1993 | </Transform> |
| 1994 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring1'/> to <HAnimJoint name='l_ring2'/> --> |
| 1995 | <Shape> |
| 1996 | <LineSet vertexCount='2' containerField='geometry'> |
| 1997 | <Coordinate point='0.1956 0.7815 -0.0794 0.1973 0.7287 -0.0777'/> |
| 1998 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1999 | </LineSet> |
| 2000 | </Shape> |
| 2001 | </HAnimSegment> |
| 2002 |
<!-- HAnimJoint
hanim_l_ring2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ring2' center='0.1973 0.7287 -0.0777' name='l_ring2'> |
| 2003 |
<!-- HAnimSegment
hanim_l_ring_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_middle' name='l_ring_middle'> |
| 2004 | <!-- <HAnimJoint name='l_ring2'/> visualization sphere is placed within <HAnimSegment name='l_ring_middle'/> --> |
| 2005 | <TouchSensor description='HAnimJoint l_ring2, HAnimSegment l_ring_middle'/> |
| 2006 | <Transform translation='0.1973 0.7287 -0.0777'> |
| 2007 | <Shape USE='HAnimJointShape'/> |
| 2008 | </Transform> |
| 2009 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring2'/> to <HAnimJoint name='l_ring3'/> --> |
| 2010 | <Shape> |
| 2011 | <LineSet vertexCount='2' containerField='geometry'> |
| 2012 | <Coordinate point='0.1973 0.7287 -0.0777 0.1983 0.7045 -0.0767'/> |
| 2013 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2014 | </LineSet> |
| 2015 | </Shape> |
| 2016 | </HAnimSegment> |
| 2017 |
<!-- HAnimJoint
hanim_l_ring3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ring3' center='0.1983 0.7045 -0.0767' name='l_ring3'> |
| 2018 |
<!-- HAnimSegment
hanim_l_ring_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_distal' name='l_ring_distal'> |
| 2019 | <!-- <HAnimJoint name='l_ring3'/> visualization sphere is placed within <HAnimSegment name='l_ring_distal'/> --> |
| 2020 | <TouchSensor description='HAnimJoint l_ring3, HAnimSegment l_ring_distal'/> |
| 2021 | <Transform translation='0.1983 0.7045 -0.0767'> |
| 2022 | <Shape USE='HAnimJointShape'/> |
| 2023 | </Transform> |
| 2024 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ring3'/> to <HAnimSite name='l_ring_distal_tip'/> --> |
| 2025 | <Shape> |
| 2026 | <LineSet vertexCount='2' containerField='geometry'> |
| 2027 | <Coordinate point='0.1983 0.7045 -0.0767 0.2035 0.675 -0.0756'/> |
| 2028 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2029 | </LineSet> |
| 2030 | </Shape> |
| 2031 |
<!-- HAnimSite
hanim_l_ring_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_ring_distal_tip' name='l_ring_distal_tip' translation='0.2035 0.675 -0.0756'> |
| 2032 | <!-- HAnimSite visualization shape --> |
| 2033 | <TouchSensor description='HAnimSite l_ring_distal_tip'/> |
| 2034 | <Shape USE='HAnimSiteShape'/> |
| 2035 | </HAnimSite> |
| 2036 | </HAnimSegment> |
| 2037 | </HAnimJoint> |
| 2038 | </HAnimJoint> |
| 2039 | </HAnimJoint> |
| 2040 | </HAnimJoint> |
| 2041 |
<!-- HAnimJoint
hanim_l_pinky0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_pinky0' center='0.1925 0.8066 -0.1036' name='l_pinky0'> |
| 2042 |
<!-- HAnimSegment
hanim_l_pinky_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_metacarpal' name='l_pinky_metacarpal'> |
| 2043 | <!-- <HAnimJoint name='l_pinky0'/> visualization sphere is placed within <HAnimSegment name='l_pinky_metacarpal'/> --> |
| 2044 | <TouchSensor description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal'/> |
| 2045 | <Transform translation='0.1925 0.8066 -0.1036'> |
| 2046 | <Shape USE='HAnimJointShape'/> |
| 2047 | </Transform> |
| 2048 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky0'/> to <HAnimJoint name='l_pinky1'/> --> |
| 2049 | <Shape> |
| 2050 | <LineSet vertexCount='2' containerField='geometry'> |
| 2051 | <Coordinate point='0.1925 0.8066 -0.1036 0.1925 0.7866 -0.1036'/> |
| 2052 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2053 | </LineSet> |
| 2054 | </Shape> |
| 2055 | </HAnimSegment> |
| 2056 |
<!-- HAnimJoint
hanim_l_pinky1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_pinky1' center='0.1925 0.7866 -0.1036' name='l_pinky1'> |
| 2057 |
<!-- HAnimSegment
hanim_l_pinky_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_proximal' name='l_pinky_proximal'> |
| 2058 | <!-- <HAnimJoint name='l_pinky1'/> visualization sphere is placed within <HAnimSegment name='l_pinky_proximal'/> --> |
| 2059 | <TouchSensor description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal'/> |
| 2060 | <Transform translation='0.1925 0.7866 -0.1036'> |
| 2061 | <Shape USE='HAnimJointShape'/> |
| 2062 | </Transform> |
| 2063 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky1'/> to <HAnimJoint name='l_pinky2'/> --> |
| 2064 | <Shape> |
| 2065 | <LineSet vertexCount='2' containerField='geometry'> |
| 2066 | <Coordinate point='0.1925 0.7866 -0.1036 0.1938 0.7452 -0.1024'/> |
| 2067 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2068 | </LineSet> |
| 2069 | </Shape> |
| 2070 | </HAnimSegment> |
| 2071 |
<!-- HAnimJoint
hanim_l_pinky2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_pinky2' center='0.1938 0.7452 -0.1024' name='l_pinky2'> |
| 2072 |
<!-- HAnimSegment
hanim_l_pinky_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_middle' name='l_pinky_middle'> |
| 2073 | <!-- <HAnimJoint name='l_pinky2'/> visualization sphere is placed within <HAnimSegment name='l_pinky_middle'/> --> |
| 2074 | <TouchSensor description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle'/> |
| 2075 | <Transform translation='0.1938 0.7452 -0.1024'> |
| 2076 | <Shape USE='HAnimJointShape'/> |
| 2077 | </Transform> |
| 2078 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky2'/> to <HAnimJoint name='l_pinky3'/> --> |
| 2079 | <Shape> |
| 2080 | <LineSet vertexCount='2' containerField='geometry'> |
| 2081 | <Coordinate point='0.1938 0.7452 -0.1024 0.1948 0.7277 -0.1017'/> |
| 2082 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2083 | </LineSet> |
| 2084 | </Shape> |
| 2085 | </HAnimSegment> |
| 2086 |
<!-- HAnimJoint
hanim_l_pinky3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_pinky3' center='0.1948 0.7277 -0.1017' name='l_pinky3'> |
| 2087 |
<!-- HAnimSegment
hanim_l_pinky_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_distal' name='l_pinky_distal'> |
| 2088 | <!-- <HAnimJoint name='l_pinky3'/> visualization sphere is placed within <HAnimSegment name='l_pinky_distal'/> --> |
| 2089 | <TouchSensor description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal'/> |
| 2090 | <Transform translation='0.1948 0.7277 -0.1017'> |
| 2091 | <Shape USE='HAnimJointShape'/> |
| 2092 | </Transform> |
| 2093 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_pinky3'/> to <HAnimSite name='l_pinky_distal_tip'/> --> |
| 2094 | <Shape> |
| 2095 | <LineSet vertexCount='2' containerField='geometry'> |
| 2096 | <Coordinate point='0.1948 0.7277 -0.1017 0.2014 0.7009 -0.1012'/> |
| 2097 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2098 | </LineSet> |
| 2099 | </Shape> |
| 2100 |
<!-- HAnimSite
hanim_l_pinky_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_pinky_distal_tip' name='l_pinky_distal_tip' translation='0.2014 0.7009 -0.1012'> |
| 2101 | <!-- HAnimSite visualization shape --> |
| 2102 | <TouchSensor description='HAnimSite l_pinky_distal_tip'/> |
| 2103 | <Shape USE='HAnimSiteShape'/> |
| 2104 | </HAnimSite> |
| 2105 | </HAnimSegment> |
| 2106 | </HAnimJoint> |
| 2107 | </HAnimJoint> |
| 2108 | </HAnimJoint> |
| 2109 | </HAnimJoint> |
| 2110 | </HAnimJoint> |
| 2111 | </HAnimJoint> |
| 2112 | </HAnimJoint> |
| 2113 | </HAnimJoint> |
| 2114 | </HAnimJoint> |
| 2115 |
<!-- HAnimJoint
hanim_r_sternoclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_sternoclavicular' center='-0.082 1.4488 -0.0353' name='r_sternoclavicular'> |
| 2116 |
<!-- HAnimSegment
hanim_r_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_clavicle' name='r_clavicle'> |
| 2117 | <!-- <HAnimJoint name='r_sternoclavicular'/> visualization sphere is placed within <HAnimSegment name='r_clavicle'/> --> |
| 2118 | <TouchSensor description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle'/> |
| 2119 | <Transform translation='-0.082 1.4488 -0.0353'> |
| 2120 | <Shape USE='HAnimJointShape'/> |
| 2121 | </Transform> |
| 2122 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_sternoclavicular'/> to <HAnimJoint name='r_acromioclavicular'/> --> |
| 2123 | <Shape> |
| 2124 | <LineSet vertexCount='2' containerField='geometry'> |
| 2125 | <Coordinate point='-0.082 1.4488 -0.0353 -0.0962 1.4269 -0.0424'/> |
| 2126 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2127 | </LineSet> |
| 2128 | </Shape> |
| 2129 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_clavicale'/> --> |
| 2130 | <Shape> |
| 2131 | <LineSet vertexCount='2' containerField='geometry'> |
| 2132 | <Coordinate point='-0.082 1.4488 -0.0353 -0.0115 1.4943 0.04'/> |
| 2133 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2134 | </LineSet> |
| 2135 | </Shape> |
| 2136 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_acromion'/> --> |
| 2137 | <Shape> |
| 2138 | <LineSet vertexCount='2' containerField='geometry'> |
| 2139 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1905 1.4791 -0.0431'/> |
| 2140 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2141 | </LineSet> |
| 2142 | </Shape> |
| 2143 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_ant'/> --> |
| 2144 | <Shape> |
| 2145 | <LineSet vertexCount='2' containerField='geometry'> |
| 2146 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1626 1.4072 -0.0031'/> |
| 2147 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2148 | </LineSet> |
| 2149 | </Shape> |
| 2150 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_post'/> --> |
| 2151 | <Shape> |
| 2152 | <LineSet vertexCount='2' containerField='geometry'> |
| 2153 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1603 1.4098 -0.0826'/> |
| 2154 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2155 | </LineSet> |
| 2156 | </Shape> |
| 2157 |
<!-- HAnimSite
hanim_r_clavicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_clavicale_pt' name='r_clavicale_pt' translation='-0.0115 1.4943 0.04'> |
| 2158 | <!-- HAnimSite visualization shape --> |
| 2159 | <TouchSensor description='HAnimSite r_clavicale'/> |
| 2160 | <Shape USE='HAnimSiteShape'/> |
| 2161 | </HAnimSite> |
| 2162 |
<!-- HAnimSite
hanim_r_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_acromion_pt' name='r_acromion_pt' translation='-0.1905 1.4791 -0.0431'> |
| 2163 | <!-- HAnimSite visualization shape --> |
| 2164 | <TouchSensor description='HAnimSite r_acromion'/> |
| 2165 | <Shape USE='HAnimSiteShape'/> |
| 2166 | </HAnimSite> |
| 2167 |
<!-- HAnimSite
hanim_r_axilla_ant_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_axilla_ant_pt' name='r_axilla_ant_pt' translation='-0.1626 1.4072 -0.0031'> |
| 2168 | <!-- HAnimSite visualization shape --> |
| 2169 | <TouchSensor description='HAnimSite r_axilla_ant'/> |
| 2170 | <Shape USE='HAnimSiteShape'/> |
| 2171 | </HAnimSite> |
| 2172 |
<!-- HAnimSite
hanim_r_axilla_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_axilla_post_pt' name='r_axilla_post_pt' translation='-0.1603 1.4098 -0.0826'> |
| 2173 | <!-- HAnimSite visualization shape --> |
| 2174 | <TouchSensor description='HAnimSite r_axilla_post'/> |
| 2175 | <Shape USE='HAnimSiteShape'/> |
| 2176 | </HAnimSite> |
| 2177 | </HAnimSegment> |
| 2178 |
<!-- HAnimJoint
hanim_r_acromioclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_acromioclavicular' center='-0.0962 1.4269 -0.0424' name='r_acromioclavicular'> |
| 2179 |
<!-- HAnimSegment
hanim_r_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_scapula' name='r_scapula'> |
| 2180 | <!-- <HAnimJoint name='r_acromioclavicular'/> visualization sphere is placed within <HAnimSegment name='r_scapula'/> --> |
| 2181 | <TouchSensor description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula'/> |
| 2182 | <Transform translation='-0.0962 1.4269 -0.0424'> |
| 2183 | <Shape USE='HAnimJointShape'/> |
| 2184 | </Transform> |
| 2185 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_acromioclavicular'/> to <HAnimJoint name='r_shoulder'/> --> |
| 2186 | <Shape> |
| 2187 | <LineSet vertexCount='2' containerField='geometry'> |
| 2188 | <Coordinate point='-0.0962 1.4269 -0.0424 -0.2029 1.4376 -0.0387'/> |
| 2189 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2190 | </LineSet> |
| 2191 | </Shape> |
| 2192 | </HAnimSegment> |
| 2193 |
<!-- HAnimJoint
hanim_r_shoulder is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_shoulder' center='-0.2029 1.4376 -0.0387' name='r_shoulder'> |
| 2194 |
<!-- HAnimSegment
hanim_r_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_upperarm' name='r_upperarm'> |
| 2195 | <!-- <HAnimJoint name='r_shoulder'/> visualization sphere is placed within <HAnimSegment name='r_upperarm'/> --> |
| 2196 | <TouchSensor description='HAnimJoint r_shoulder, HAnimSegment r_upperarm'/> |
| 2197 | <Transform translation='-0.2029 1.4376 -0.0387'> |
| 2198 | <Shape USE='HAnimJointShape'/> |
| 2199 | </Transform> |
| 2200 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_shoulder'/> to <HAnimJoint name='r_elbow'/> --> |
| 2201 | <Shape> |
| 2202 | <LineSet vertexCount='2' containerField='geometry'> |
| 2203 | <Coordinate point='-0.2029 1.4376 -0.0387 -0.2014 1.1357 -0.0682'/> |
| 2204 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2205 | </LineSet> |
| 2206 | </Shape> |
| 2207 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_shoulder'/> to <HAnimSite name='r_humeral_lateral_epicn'/> --> |
| 2208 | <Shape> |
| 2209 | <LineSet vertexCount='2' containerField='geometry'> |
| 2210 | <Coordinate point='-0.2029 1.4376 -0.0387 -0.2224 1.1517 -0.1033'/> |
| 2211 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2212 | </LineSet> |
| 2213 | </Shape> |
| 2214 |
<!-- HAnimSite
hanim_r_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt' translation='-0.2224 1.1517 -0.1033'> |
| 2215 | <!-- HAnimSite visualization shape --> |
| 2216 | <TouchSensor description='HAnimSite r_humeral_lateral_epicn'/> |
| 2217 | <Shape USE='HAnimSiteShape'/> |
| 2218 | </HAnimSite> |
| 2219 | </HAnimSegment> |
| 2220 |
<!-- HAnimJoint
hanim_r_elbow is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_elbow' center='-0.2014 1.1357 -0.0682' name='r_elbow'> |
| 2221 |
<!-- HAnimSegment
hanim_r_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_forearm' name='r_forearm'> |
| 2222 | <!-- <HAnimJoint name='r_elbow'/> visualization sphere is placed within <HAnimSegment name='r_forearm'/> --> |
| 2223 | <TouchSensor description='HAnimJoint r_elbow, HAnimSegment r_forearm'/> |
| 2224 | <Transform translation='-0.2014 1.1357 -0.0682'> |
| 2225 | <Shape USE='HAnimJointShape'/> |
| 2226 | </Transform> |
| 2227 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_elbow'/> to <HAnimJoint name='r_wrist'/> --> |
| 2228 | <Shape> |
| 2229 | <LineSet vertexCount='2' containerField='geometry'> |
| 2230 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1984 0.8663 -0.0583'/> |
| 2231 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2232 | </LineSet> |
| 2233 | </Shape> |
| 2234 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radial_styloid'/> --> |
| 2235 | <Shape> |
| 2236 | <LineSet vertexCount='2' containerField='geometry'> |
| 2237 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1884 0.8676 -0.036'/> |
| 2238 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2239 | </LineSet> |
| 2240 | </Shape> |
| 2241 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_olecranon'/> --> |
| 2242 | <Shape> |
| 2243 | <LineSet vertexCount='2' containerField='geometry'> |
| 2244 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1907 1.1405 -0.1065'/> |
| 2245 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2246 | </LineSet> |
| 2247 | </Shape> |
| 2248 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_humeral_medial_epicn'/> --> |
| 2249 | <Shape> |
| 2250 | <LineSet vertexCount='2' containerField='geometry'> |
| 2251 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.168 1.1298 -0.1062'/> |
| 2252 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2253 | </LineSet> |
| 2254 | </Shape> |
| 2255 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radiale'/> --> |
| 2256 | <Shape> |
| 2257 | <LineSet vertexCount='2' containerField='geometry'> |
| 2258 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.213 1.1305 -0.1091'/> |
| 2259 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2260 | </LineSet> |
| 2261 | </Shape> |
| 2262 |
<!-- HAnimSite
hanim_r_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt' translation='-0.1884 0.8676 -0.036'> |
| 2263 | <!-- HAnimSite visualization shape --> |
| 2264 | <TouchSensor description='HAnimSite r_radial_styloid'/> |
| 2265 | <Shape USE='HAnimSiteShape'/> |
| 2266 | </HAnimSite> |
| 2267 |
<!-- HAnimSite
hanim_r_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_olecranon_pt' name='r_olecranon_pt' translation='-0.1907 1.1405 -0.1065'> |
| 2268 | <!-- HAnimSite visualization shape --> |
| 2269 | <TouchSensor description='HAnimSite r_olecranon'/> |
| 2270 | <Shape USE='HAnimSiteShape'/> |
| 2271 | </HAnimSite> |
| 2272 |
<!-- HAnimSite
hanim_r_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt' translation='-0.168 1.1298 -0.1062'> |
| 2273 | <!-- HAnimSite visualization shape --> |
| 2274 | <TouchSensor description='HAnimSite r_humeral_medial_epicn'/> |
| 2275 | <Shape USE='HAnimSiteShape'/> |
| 2276 | </HAnimSite> |
| 2277 |
<!-- HAnimSite
hanim_r_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_radiale_pt' name='r_radiale_pt' translation='-0.213 1.1305 -0.1091'> |
| 2278 | <!-- HAnimSite visualization shape --> |
| 2279 | <TouchSensor description='HAnimSite r_radiale'/> |
| 2280 | <Shape USE='HAnimSiteShape'/> |
| 2281 | </HAnimSite> |
| 2282 | </HAnimSegment> |
| 2283 |
<!-- HAnimJoint
hanim_r_wrist is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_wrist' center='-0.1984 0.8663 -0.0583' name='r_wrist'> |
| 2284 |
<!-- HAnimSegment
hanim_r_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hand' name='r_hand'> |
| 2285 | <!-- <HAnimJoint name='r_wrist'/> visualization sphere is placed within <HAnimSegment name='r_hand'/> --> |
| 2286 | <TouchSensor description='HAnimJoint r_wrist, HAnimSegment r_hand'/> |
| 2287 | <Transform translation='-0.1984 0.8663 -0.0583'> |
| 2288 | <Shape USE='HAnimJointShape'/> |
| 2289 | </Transform> |
| 2290 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_thumb1'/> --> |
| 2291 | <Shape> |
| 2292 | <LineSet vertexCount='2' containerField='geometry'> |
| 2293 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1924 0.8472 -0.0534'/> |
| 2294 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2295 | </LineSet> |
| 2296 | </Shape> |
| 2297 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_index0'/> --> |
| 2298 | <Shape> |
| 2299 | <LineSet vertexCount='2' containerField='geometry'> |
| 2300 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1983 0.8024 -0.028'/> |
| 2301 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2302 | </LineSet> |
| 2303 | </Shape> |
| 2304 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_middle0'/> --> |
| 2305 | <Shape> |
| 2306 | <LineSet vertexCount='2' containerField='geometry'> |
| 2307 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1987 0.8029 -0.053'/> |
| 2308 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2309 | </LineSet> |
| 2310 | </Shape> |
| 2311 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_ring0'/> --> |
| 2312 | <Shape> |
| 2313 | <LineSet vertexCount='2' containerField='geometry'> |
| 2314 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1956 0.8019 -0.0794'/> |
| 2315 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2316 | </LineSet> |
| 2317 | </Shape> |
| 2318 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_pinky0'/> --> |
| 2319 | <Shape> |
| 2320 | <LineSet vertexCount='2' containerField='geometry'> |
| 2321 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1925 0.8066 -0.1036'/> |
| 2322 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2323 | </LineSet> |
| 2324 | </Shape> |
| 2325 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha2'/> --> |
| 2326 | <Shape> |
| 2327 | <LineSet vertexCount='2' containerField='geometry'> |
| 2328 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1977 0.8169 -0.0177'/> |
| 2329 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2330 | </LineSet> |
| 2331 | </Shape> |
| 2332 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_ulnar_styloid'/> --> |
| 2333 | <Shape> |
| 2334 | <LineSet vertexCount='2' containerField='geometry'> |
| 2335 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.2117 0.8562 -0.0584'/> |
| 2336 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2337 | </LineSet> |
| 2338 | </Shape> |
| 2339 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha5'/> --> |
| 2340 | <Shape> |
| 2341 | <LineSet vertexCount='2' containerField='geometry'> |
| 2342 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1929 0.789 -0.1064'/> |
| 2343 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2344 | </LineSet> |
| 2345 | </Shape> |
| 2346 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_hand_front_view'/> --> |
| 2347 | <Shape> |
| 2348 | <LineSet vertexCount='2' containerField='geometry'> |
| 2349 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.3 0.75 0.45'/> |
| 2350 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 2351 | </LineSet> |
| 2352 | </Shape> |
| 2353 |
<!-- HAnimSite
hanim_r_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt' translation='-0.1977 0.8169 -0.0177'> |
| 2354 | <!-- HAnimSite visualization shape --> |
| 2355 | <TouchSensor description='HAnimSite r_metacarpal_pha2'/> |
| 2356 | <Shape USE='HAnimSiteShape'/> |
| 2357 | </HAnimSite> |
| 2358 |
<!-- HAnimSite
hanim_r_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt' translation='-0.2117 0.8562 -0.0584'> |
| 2359 | <!-- HAnimSite visualization shape --> |
| 2360 | <TouchSensor description='HAnimSite r_ulnar_styloid'/> |
| 2361 | <Shape USE='HAnimSiteShape'/> |
| 2362 | </HAnimSite> |
| 2363 |
<!-- HAnimSite
hanim_r_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt' translation='-0.1929 0.789 -0.1064'> |
| 2364 | <!-- HAnimSite visualization shape --> |
| 2365 | <TouchSensor description='HAnimSite r_metacarpal_pha5'/> |
| 2366 | <Shape USE='HAnimSiteShape'/> |
| 2367 | </HAnimSite> |
| 2368 |
<!-- HAnimSite
hanim_r_hand_front_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_hand_front_view' name='r_hand_front_view' translation='-0.3 0.75 0.45'> |
| 2369 | <!-- HAnimSite visualization shape --> |
| 2370 | <TouchSensor description='HAnimSite r_hand_front_view'/> |
| 2371 | <Shape USE='HAnimSiteShape'/> |
| 2372 | <Viewpoint DEF='hanim_r_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='right hand front' position='0 0 0'/> |
| 2373 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2374 | <Anchor description='HAnimSite hanim_r_hand_front_view Viewpoint' url=' "#hanim_r_hand_front_viewpoint" '> |
| 2375 | <LOD forceTransitions='true' range='0.04'> |
| 2376 | <WorldInfo info='"hide diamond when close"'/> |
| 2377 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2378 | </LOD> |
| 2379 | </Anchor> |
| 2380 | </HAnimSite> |
| 2381 | </HAnimSegment> |
| 2382 |
<!-- HAnimJoint
hanim_r_thumb1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_thumb1' center='-0.1924 0.8472 -0.0534' name='r_thumb1'> |
| 2383 |
<!-- HAnimSegment
hanim_r_thumb_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_metacarpal' name='r_thumb_metacarpal'> |
| 2384 | <!-- <HAnimJoint name='r_thumb1'/> visualization sphere is placed within <HAnimSegment name='r_thumb_metacarpal'/> --> |
| 2385 | <TouchSensor description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal'/> |
| 2386 | <Transform translation='-0.1924 0.8472 -0.0534'> |
| 2387 | <Shape USE='HAnimJointShape'/> |
| 2388 | </Transform> |
| 2389 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb1'/> to <HAnimJoint name='r_thumb2'/> --> |
| 2390 | <Shape> |
| 2391 | <LineSet vertexCount='2' containerField='geometry'> |
| 2392 | <Coordinate point='-0.1924 0.8472 -0.0534 -0.1951 0.8226 0.0246'/> |
| 2393 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2394 | </LineSet> |
| 2395 | </Shape> |
| 2396 | </HAnimSegment> |
| 2397 |
<!-- HAnimJoint
hanim_r_thumb2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_thumb2' center='-0.1951 0.8226 0.0246' name='r_thumb2'> |
| 2398 |
<!-- HAnimSegment
hanim_r_thumb_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_proximal' name='r_thumb_proximal'> |
| 2399 | <!-- <HAnimJoint name='r_thumb2'/> visualization sphere is placed within <HAnimSegment name='r_thumb_proximal'/> --> |
| 2400 | <TouchSensor description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal'/> |
| 2401 | <Transform translation='-0.1951 0.8226 0.0246'> |
| 2402 | <Shape USE='HAnimJointShape'/> |
| 2403 | </Transform> |
| 2404 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb2'/> to <HAnimJoint name='r_thumb3'/> --> |
| 2405 | <Shape> |
| 2406 | <LineSet vertexCount='2' containerField='geometry'> |
| 2407 | <Coordinate point='-0.1951 0.8226 0.0246 -0.1955 0.8159 0.0464'/> |
| 2408 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2409 | </LineSet> |
| 2410 | </Shape> |
| 2411 | </HAnimSegment> |
| 2412 |
<!-- HAnimJoint
hanim_r_thumb3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_thumb3' center='-0.1955 0.8159 0.0464' name='r_thumb3'> |
| 2413 |
<!-- HAnimSegment
hanim_r_thumb_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_distal' name='r_thumb_distal'> |
| 2414 | <!-- <HAnimJoint name='r_thumb3'/> visualization sphere is placed within <HAnimSegment name='r_thumb_distal'/> --> |
| 2415 | <TouchSensor description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal'/> |
| 2416 | <Transform translation='-0.1955 0.8159 0.0464'> |
| 2417 | <Shape USE='HAnimJointShape'/> |
| 2418 | </Transform> |
| 2419 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_thumb3'/> to <HAnimSite name='r_thumb_distal_tip'/> --> |
| 2420 | <Shape> |
| 2421 | <LineSet vertexCount='2' containerField='geometry'> |
| 2422 | <Coordinate point='-0.1955 0.8159 0.0464 -0.1869 0.809 0.082'/> |
| 2423 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2424 | </LineSet> |
| 2425 | </Shape> |
| 2426 |
<!-- HAnimSite
hanim_r_thumb_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_thumb_distal_tip' name='r_thumb_distal_tip' translation='-0.1869 0.809 0.082'> |
| 2427 | <!-- HAnimSite visualization shape --> |
| 2428 | <TouchSensor description='HAnimSite r_thumb_distal_tip'/> |
| 2429 | <Shape USE='HAnimSiteShape'/> |
| 2430 | </HAnimSite> |
| 2431 | </HAnimSegment> |
| 2432 | </HAnimJoint> |
| 2433 | </HAnimJoint> |
| 2434 | </HAnimJoint> |
| 2435 |
<!-- HAnimJoint
hanim_r_index0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_index0' center='-0.1983 0.8024 -0.028' name='r_index0'> |
| 2436 |
<!-- HAnimSegment
hanim_r_index_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_metacarpal' name='r_index_metacarpal'> |
| 2437 | <!-- <HAnimJoint name='r_index0'/> visualization sphere is placed within <HAnimSegment name='r_index_metacarpal'/> --> |
| 2438 | <TouchSensor description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal'/> |
| 2439 | <Transform translation='-0.1983 0.8024 -0.028'> |
| 2440 | <Shape USE='HAnimJointShape'/> |
| 2441 | </Transform> |
| 2442 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index0'/> to <HAnimJoint name='r_index1'/> --> |
| 2443 | <Shape> |
| 2444 | <LineSet vertexCount='2' containerField='geometry'> |
| 2445 | <Coordinate point='-0.1983 0.8024 -0.028 -0.1983 0.7815 -0.028'/> |
| 2446 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2447 | </LineSet> |
| 2448 | </Shape> |
| 2449 | </HAnimSegment> |
| 2450 |
<!-- HAnimJoint
hanim_r_index1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_index1' center='-0.1983 0.7815 -0.028' name='r_index1'> |
| 2451 |
<!-- HAnimSegment
hanim_r_index_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_proximal' name='r_index_proximal'> |
| 2452 | <!-- <HAnimJoint name='r_index1'/> visualization sphere is placed within <HAnimSegment name='r_index_proximal'/> --> |
| 2453 | <TouchSensor description='HAnimJoint r_index1, HAnimSegment r_index_proximal'/> |
| 2454 | <Transform translation='-0.1983 0.7815 -0.028'> |
| 2455 | <Shape USE='HAnimJointShape'/> |
| 2456 | </Transform> |
| 2457 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index1'/> to <HAnimJoint name='r_index2'/> --> |
| 2458 | <Shape> |
| 2459 | <LineSet vertexCount='2' containerField='geometry'> |
| 2460 | <Coordinate point='-0.1983 0.7815 -0.028 -0.2017 0.7363 -0.0248'/> |
| 2461 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2462 | </LineSet> |
| 2463 | </Shape> |
| 2464 | </HAnimSegment> |
| 2465 |
<!-- HAnimJoint
hanim_r_index2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_index2' center='-0.2017 0.7363 -0.0248' name='r_index2'> |
| 2466 |
<!-- HAnimSegment
hanim_r_index_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_middle' name='r_index_middle'> |
| 2467 | <!-- <HAnimJoint name='r_index2'/> visualization sphere is placed within <HAnimSegment name='r_index_middle'/> --> |
| 2468 | <TouchSensor description='HAnimJoint r_index2, HAnimSegment r_index_middle'/> |
| 2469 | <Transform translation='-0.2017 0.7363 -0.0248'> |
| 2470 | <Shape USE='HAnimJointShape'/> |
| 2471 | </Transform> |
| 2472 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index2'/> to <HAnimJoint name='r_index3'/> --> |
| 2473 | <Shape> |
| 2474 | <LineSet vertexCount='2' containerField='geometry'> |
| 2475 | <Coordinate point='-0.2017 0.7363 -0.0248 -0.2028 0.7139 -0.0236'/> |
| 2476 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2477 | </LineSet> |
| 2478 | </Shape> |
| 2479 | </HAnimSegment> |
| 2480 |
<!-- HAnimJoint
hanim_r_index3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_index3' center='-0.2028 0.7139 -0.0236' name='r_index3'> |
| 2481 |
<!-- HAnimSegment
hanim_r_index_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_distal' name='r_index_distal'> |
| 2482 | <!-- <HAnimJoint name='r_index3'/> visualization sphere is placed within <HAnimSegment name='r_index_distal'/> --> |
| 2483 | <TouchSensor description='HAnimJoint r_index3, HAnimSegment r_index_distal'/> |
| 2484 | <Transform translation='-0.2028 0.7139 -0.0236'> |
| 2485 | <Shape USE='HAnimJointShape'/> |
| 2486 | </Transform> |
| 2487 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_index_distal_tip'/> --> |
| 2488 | <Shape> |
| 2489 | <LineSet vertexCount='2' containerField='geometry'> |
| 2490 | <Coordinate point='-0.2028 0.7139 -0.0236 -0.198 0.6883 -0.018'/> |
| 2491 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2492 | </LineSet> |
| 2493 | </Shape> |
| 2494 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_dactylion'/> --> |
| 2495 | <Shape> |
| 2496 | <LineSet vertexCount='2' containerField='geometry'> |
| 2497 | <Coordinate point='-0.2028 0.7139 -0.0236 -0.1941 0.6772 -0.0423'/> |
| 2498 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2499 | </LineSet> |
| 2500 | </Shape> |
| 2501 |
<!-- HAnimSite
hanim_r_index_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_index_distal_tip' name='r_index_distal_tip' translation='-0.198 0.6883 -0.018'> |
| 2502 | <!-- HAnimSite visualization shape --> |
| 2503 | <TouchSensor description='HAnimSite r_index_distal_tip'/> |
| 2504 | <Shape USE='HAnimSiteShape'/> |
| 2505 | </HAnimSite> |
| 2506 |
<!-- HAnimSite
hanim_r_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_dactylion_pt' name='r_dactylion_pt' translation='-0.1941 0.6772 -0.0423'> |
| 2507 | <!-- HAnimSite visualization shape --> |
| 2508 | <TouchSensor description='HAnimSite r_dactylion'/> |
| 2509 | <Shape USE='HAnimSiteShape'/> |
| 2510 | </HAnimSite> |
| 2511 | </HAnimSegment> |
| 2512 | </HAnimJoint> |
| 2513 | </HAnimJoint> |
| 2514 | </HAnimJoint> |
| 2515 | </HAnimJoint> |
| 2516 |
<!-- HAnimJoint
hanim_r_middle0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_middle0' center='-0.1987 0.8029 -0.053' name='r_middle0'> |
| 2517 |
<!-- HAnimSegment
hanim_r_middle_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_metacarpal' name='r_middle_metacarpal'> |
| 2518 | <!-- <HAnimJoint name='r_middle0'/> visualization sphere is placed within <HAnimSegment name='r_middle_metacarpal'/> --> |
| 2519 | <TouchSensor description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal'/> |
| 2520 | <Transform translation='-0.1987 0.8029 -0.053'> |
| 2521 | <Shape USE='HAnimJointShape'/> |
| 2522 | </Transform> |
| 2523 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle0'/> to <HAnimJoint name='r_middle1'/> --> |
| 2524 | <Shape> |
| 2525 | <LineSet vertexCount='2' containerField='geometry'> |
| 2526 | <Coordinate point='-0.1987 0.8029 -0.053 -0.1987 0.7818 -0.053'/> |
| 2527 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2528 | </LineSet> |
| 2529 | </Shape> |
| 2530 | </HAnimSegment> |
| 2531 |
<!-- HAnimJoint
hanim_r_middle1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_middle1' center='-0.1987 0.7818 -0.053' name='r_middle1'> |
| 2532 |
<!-- HAnimSegment
hanim_r_middle_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_proximal' name='r_middle_proximal'> |
| 2533 | <!-- <HAnimJoint name='r_middle1'/> visualization sphere is placed within <HAnimSegment name='r_middle_proximal'/> --> |
| 2534 | <TouchSensor description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal'/> |
| 2535 | <Transform translation='-0.1987 0.7818 -0.053'> |
| 2536 | <Shape USE='HAnimJointShape'/> |
| 2537 | </Transform> |
| 2538 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle1'/> to <HAnimJoint name='r_middle2'/> --> |
| 2539 | <Shape> |
| 2540 | <LineSet vertexCount='2' containerField='geometry'> |
| 2541 | <Coordinate point='-0.1987 0.7818 -0.053 -0.2013 0.7273 -0.0503'/> |
| 2542 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2543 | </LineSet> |
| 2544 | </Shape> |
| 2545 | </HAnimSegment> |
| 2546 |
<!-- HAnimJoint
hanim_r_middle2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_middle2' center='-0.2013 0.7273 -0.0503' name='r_middle2'> |
| 2547 |
<!-- HAnimSegment
hanim_r_middle_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_middle' name='r_middle_middle'> |
| 2548 | <!-- <HAnimJoint name='r_middle2'/> visualization sphere is placed within <HAnimSegment name='r_middle_middle'/> --> |
| 2549 | <TouchSensor description='HAnimJoint r_middle2, HAnimSegment r_middle_middle'/> |
| 2550 | <Transform translation='-0.2013 0.7273 -0.0503'> |
| 2551 | <Shape USE='HAnimJointShape'/> |
| 2552 | </Transform> |
| 2553 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle2'/> to <HAnimJoint name='r_middle3'/> --> |
| 2554 | <Shape> |
| 2555 | <LineSet vertexCount='2' containerField='geometry'> |
| 2556 | <Coordinate point='-0.2013 0.7273 -0.0503 -0.2026 0.7011 -0.0494'/> |
| 2557 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2558 | </LineSet> |
| 2559 | </Shape> |
| 2560 | </HAnimSegment> |
| 2561 |
<!-- HAnimJoint
hanim_r_middle3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_middle3' center='-0.2026 0.7011 -0.0494' name='r_middle3'> |
| 2562 |
<!-- HAnimSegment
hanim_r_middle_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_distal' name='r_middle_distal'> |
| 2563 | <!-- <HAnimJoint name='r_middle3'/> visualization sphere is placed within <HAnimSegment name='r_middle_distal'/> --> |
| 2564 | <TouchSensor description='HAnimJoint r_middle3, HAnimSegment r_middle_distal'/> |
| 2565 | <Transform translation='-0.2026 0.7011 -0.0494'> |
| 2566 | <Shape USE='HAnimJointShape'/> |
| 2567 | </Transform> |
| 2568 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_middle3'/> to <HAnimSite name='r_middle_distal_tip'/> --> |
| 2569 | <Shape> |
| 2570 | <LineSet vertexCount='2' containerField='geometry'> |
| 2571 | <Coordinate point='-0.2026 0.7011 -0.0494 -0.1969 0.6758 -0.0427'/> |
| 2572 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2573 | </LineSet> |
| 2574 | </Shape> |
| 2575 |
<!-- HAnimSite
hanim_r_middle_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_middle_distal_tip' name='r_middle_distal_tip' translation='-0.1969 0.6758 -0.0427'> |
| 2576 | <!-- HAnimSite visualization shape --> |
| 2577 | <TouchSensor description='HAnimSite r_middle_distal_tip'/> |
| 2578 | <Shape USE='HAnimSiteShape'/> |
| 2579 | </HAnimSite> |
| 2580 | </HAnimSegment> |
| 2581 | </HAnimJoint> |
| 2582 | </HAnimJoint> |
| 2583 | </HAnimJoint> |
| 2584 | </HAnimJoint> |
| 2585 |
<!-- HAnimJoint
hanim_r_ring0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ring0' center='-0.1956 0.8019 -0.0794' name='r_ring0'> |
| 2586 |
<!-- HAnimSegment
hanim_r_ring_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_metacarpal' name='r_ring_metacarpal'> |
| 2587 | <!-- <HAnimJoint name='r_ring0'/> visualization sphere is placed within <HAnimSegment name='r_ring_metacarpal'/> --> |
| 2588 | <TouchSensor description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal'/> |
| 2589 | <Transform translation='-0.1956 0.8019 -0.0794'> |
| 2590 | <Shape USE='HAnimJointShape'/> |
| 2591 | </Transform> |
| 2592 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring0'/> to <HAnimJoint name='r_ring1'/> --> |
| 2593 | <Shape> |
| 2594 | <LineSet vertexCount='2' containerField='geometry'> |
| 2595 | <Coordinate point='-0.1956 0.8019 -0.0794 -0.1956 0.7815 -0.0794'/> |
| 2596 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2597 | </LineSet> |
| 2598 | </Shape> |
| 2599 | </HAnimSegment> |
| 2600 |
<!-- HAnimJoint
hanim_r_ring1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ring1' center='-0.1956 0.7815 -0.0794' name='r_ring1'> |
| 2601 |
<!-- HAnimSegment
hanim_r_ring_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_proximal' name='r_ring_proximal'> |
| 2602 | <!-- <HAnimJoint name='r_ring1'/> visualization sphere is placed within <HAnimSegment name='r_ring_proximal'/> --> |
| 2603 | <TouchSensor description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal'/> |
| 2604 | <Transform translation='-0.1956 0.7815 -0.0794'> |
| 2605 | <Shape USE='HAnimJointShape'/> |
| 2606 | </Transform> |
| 2607 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring1'/> to <HAnimJoint name='r_ring2'/> --> |
| 2608 | <Shape> |
| 2609 | <LineSet vertexCount='2' containerField='geometry'> |
| 2610 | <Coordinate point='-0.1956 0.7815 -0.0794 -0.1973 0.7287 -0.0777'/> |
| 2611 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2612 | </LineSet> |
| 2613 | </Shape> |
| 2614 | </HAnimSegment> |
| 2615 |
<!-- HAnimJoint
hanim_r_ring2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ring2' center='-0.1973 0.7287 -0.0777' name='r_ring2'> |
| 2616 |
<!-- HAnimSegment
hanim_r_ring_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_middle' name='r_ring_middle'> |
| 2617 | <!-- <HAnimJoint name='r_ring2'/> visualization sphere is placed within <HAnimSegment name='r_ring_middle'/> --> |
| 2618 | <TouchSensor description='HAnimJoint r_ring2, HAnimSegment r_ring_middle'/> |
| 2619 | <Transform translation='-0.1973 0.7287 -0.0777'> |
| 2620 | <Shape USE='HAnimJointShape'/> |
| 2621 | </Transform> |
| 2622 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring2'/> to <HAnimJoint name='r_ring3'/> --> |
| 2623 | <Shape> |
| 2624 | <LineSet vertexCount='2' containerField='geometry'> |
| 2625 | <Coordinate point='-0.1973 0.7287 -0.0777 -0.1983 0.7045 -0.0767'/> |
| 2626 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2627 | </LineSet> |
| 2628 | </Shape> |
| 2629 | </HAnimSegment> |
| 2630 |
<!-- HAnimJoint
hanim_r_ring3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ring3' center='-0.1983 0.7045 -0.0767' name='r_ring3'> |
| 2631 |
<!-- HAnimSegment
hanim_r_ring_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_distal' name='r_ring_distal'> |
| 2632 | <!-- <HAnimJoint name='r_ring3'/> visualization sphere is placed within <HAnimSegment name='r_ring_distal'/> --> |
| 2633 | <TouchSensor description='HAnimJoint r_ring3, HAnimSegment r_ring_distal'/> |
| 2634 | <Transform translation='-0.1983 0.7045 -0.0767'> |
| 2635 | <Shape USE='HAnimJointShape'/> |
| 2636 | </Transform> |
| 2637 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ring3'/> to <HAnimSite name='r_ring_distal_tip'/> --> |
| 2638 | <Shape> |
| 2639 | <LineSet vertexCount='2' containerField='geometry'> |
| 2640 | <Coordinate point='-0.1983 0.7045 -0.0767 -0.1934 0.6778 -0.0693'/> |
| 2641 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2642 | </LineSet> |
| 2643 | </Shape> |
| 2644 |
<!-- HAnimSite
hanim_r_ring_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_ring_distal_tip' name='r_ring_distal_tip' translation='-0.1934 0.6778 -0.0693'> |
| 2645 | <!-- HAnimSite visualization shape --> |
| 2646 | <TouchSensor description='HAnimSite r_ring_distal_tip'/> |
| 2647 | <Shape USE='HAnimSiteShape'/> |
| 2648 | </HAnimSite> |
| 2649 | </HAnimSegment> |
| 2650 | </HAnimJoint> |
| 2651 | </HAnimJoint> |
| 2652 | </HAnimJoint> |
| 2653 | </HAnimJoint> |
| 2654 |
<!-- HAnimJoint
hanim_r_pinky0 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_pinky0' center='-0.1925 0.8066 -0.1036' name='r_pinky0'> |
| 2655 |
<!-- HAnimSegment
hanim_r_pinky_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_metacarpal' name='r_pinky_metacarpal'> |
| 2656 | <!-- <HAnimJoint name='r_pinky0'/> visualization sphere is placed within <HAnimSegment name='r_pinky_metacarpal'/> --> |
| 2657 | <TouchSensor description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal'/> |
| 2658 | <Transform translation='-0.1925 0.8066 -0.1036'> |
| 2659 | <Shape USE='HAnimJointShape'/> |
| 2660 | </Transform> |
| 2661 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky0'/> to <HAnimJoint name='r_pinky1'/> --> |
| 2662 | <Shape> |
| 2663 | <LineSet vertexCount='2' containerField='geometry'> |
| 2664 | <Coordinate point='-0.1925 0.8066 -0.1036 -0.1925 0.7866 -0.1036'/> |
| 2665 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2666 | </LineSet> |
| 2667 | </Shape> |
| 2668 | </HAnimSegment> |
| 2669 |
<!-- HAnimJoint
hanim_r_pinky1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_pinky1' center='-0.1925 0.7866 -0.1036' name='r_pinky1'> |
| 2670 |
<!-- HAnimSegment
hanim_r_pinky_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_proximal' name='r_pinky_proximal'> |
| 2671 | <!-- <HAnimJoint name='r_pinky1'/> visualization sphere is placed within <HAnimSegment name='r_pinky_proximal'/> --> |
| 2672 | <TouchSensor description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal'/> |
| 2673 | <Transform translation='-0.1925 0.7866 -0.1036'> |
| 2674 | <Shape USE='HAnimJointShape'/> |
| 2675 | </Transform> |
| 2676 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky1'/> to <HAnimJoint name='r_pinky2'/> --> |
| 2677 | <Shape> |
| 2678 | <LineSet vertexCount='2' containerField='geometry'> |
| 2679 | <Coordinate point='-0.1925 0.7866 -0.1036 -0.1938 0.7452 -0.1024'/> |
| 2680 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2681 | </LineSet> |
| 2682 | </Shape> |
| 2683 | </HAnimSegment> |
| 2684 |
<!-- HAnimJoint
hanim_r_pinky2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_pinky2' center='-0.1938 0.7452 -0.1024' name='r_pinky2'> |
| 2685 |
<!-- HAnimSegment
hanim_r_pinky_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_middle' name='r_pinky_middle'> |
| 2686 | <!-- <HAnimJoint name='r_pinky2'/> visualization sphere is placed within <HAnimSegment name='r_pinky_middle'/> --> |
| 2687 | <TouchSensor description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle'/> |
| 2688 | <Transform translation='-0.1938 0.7452 -0.1024'> |
| 2689 | <Shape USE='HAnimJointShape'/> |
| 2690 | </Transform> |
| 2691 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky2'/> to <HAnimJoint name='r_pinky3'/> --> |
| 2692 | <Shape> |
| 2693 | <LineSet vertexCount='2' containerField='geometry'> |
| 2694 | <Coordinate point='-0.1938 0.7452 -0.1024 -0.1948 0.7277 -0.1017'/> |
| 2695 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2696 | </LineSet> |
| 2697 | </Shape> |
| 2698 | </HAnimSegment> |
| 2699 |
<!-- HAnimJoint
hanim_r_pinky3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_pinky3' center='-0.1948 0.7277 -0.1017' name='r_pinky3'> |
| 2700 |
<!-- HAnimSegment
hanim_r_pinky_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_distal' name='r_pinky_distal'> |
| 2701 | <!-- <HAnimJoint name='r_pinky3'/> visualization sphere is placed within <HAnimSegment name='r_pinky_distal'/> --> |
| 2702 | <TouchSensor description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal'/> |
| 2703 | <Transform translation='-0.1948 0.7277 -0.1017'> |
| 2704 | <Shape USE='HAnimJointShape'/> |
| 2705 | </Transform> |
| 2706 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_pinky3'/> to <HAnimSite name='r_pinky_distal_tip'/> --> |
| 2707 | <Shape> |
| 2708 | <LineSet vertexCount='2' containerField='geometry'> |
| 2709 | <Coordinate point='-0.1948 0.7277 -0.1017 -0.1938 0.7035 -0.0949'/> |
| 2710 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2711 | </LineSet> |
| 2712 | </Shape> |
| 2713 |
<!-- HAnimSite
hanim_r_pinky_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_pinky_distal_tip' name='r_pinky_distal_tip' translation='-0.1938 0.7035 -0.0949'> |
| 2714 | <!-- HAnimSite visualization shape --> |
| 2715 | <TouchSensor description='HAnimSite r_pinky_distal_tip'/> |
| 2716 | <Shape USE='HAnimSiteShape'/> |
| 2717 | </HAnimSite> |
| 2718 | </HAnimSegment> |
| 2719 | </HAnimJoint> |
| 2720 | </HAnimJoint> |
| 2721 | </HAnimJoint> |
| 2722 | </HAnimJoint> |
| 2723 | </HAnimJoint> |
| 2724 | </HAnimJoint> |
| 2725 | </HAnimJoint> |
| 2726 | </HAnimJoint> |
| 2727 | </HAnimJoint> |
| 2728 | </HAnimJoint> |
| 2729 | </HAnimJoint> |
| 2730 | </HAnimJoint> |
| 2731 | </HAnimJoint> |
| 2732 | </HAnimJoint> |
| 2733 | </HAnimJoint> |
| 2734 | </HAnimJoint> |
| 2735 | </HAnimJoint> |
| 2736 | </HAnimJoint> |
| 2737 | </HAnimJoint> |
| 2738 | </HAnimJoint> |
| 2739 | </HAnimJoint> |
| 2740 | </HAnimJoint> |
| 2741 | </HAnimJoint> |
| 2742 | </HAnimJoint> |
| 2743 | </HAnimJoint> |
| 2744 | </HAnimJoint> |
| 2745 | </HAnimJoint> |
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> |
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> |
| 2748 | <HAnimSite DEF='hanim_l_inclined_view' containerField='viewpoints' name='l_inclined_view' rotation='-0.113 0.993 0.0347 0.671' translation='1.62 1.05 2.06'> |
| 2749 | <!-- HAnimSite visualization shape --> |
| 2750 | <TouchSensor description='HAnimSite l_inclined_view'/> |
| 2751 | <Shape USE='HAnimSiteShape'/> |
| 2752 | <Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/> |
| 2753 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2754 | <Anchor description='HAnimSite hanim_l_inclined_view Viewpoint' url=' "#hanim_l_inclined_viewpoint" '> |
| 2755 | <LOD forceTransitions='true' range='0.04'> |
| 2756 | <WorldInfo info='"hide diamond when close"'/> |
| 2757 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2758 | </LOD> |
| 2759 | </Anchor> |
| 2760 | </HAnimSite> |
| 2761 | <HAnimSite DEF='hanim_r_inclined_view' containerField='viewpoints' name='r_inclined_view' rotation='-0.113 -0.993 0.0347 0.671' translation='-1.62 1.05 2.06'> |
| 2762 | <!-- HAnimSite visualization shape --> |
| 2763 | <TouchSensor description='HAnimSite r_inclined_view'/> |
| 2764 | <Shape USE='HAnimSiteShape'/> |
| 2765 | <Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/> |
| 2766 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2767 | <Anchor description='HAnimSite hanim_r_inclined_view Viewpoint' url=' "#hanim_r_inclined_viewpoint" '> |
| 2768 | <LOD forceTransitions='true' range='0.04'> |
| 2769 | <WorldInfo info='"hide diamond when close"'/> |
| 2770 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2771 | </LOD> |
| 2772 | </Anchor> |
| 2773 | </HAnimSite> |
| 2774 | <HAnimSite DEF='hanim_front_view' containerField='viewpoints' name='front_view' translation='0 0.85 2.58'> |
| 2775 | <!-- HAnimSite visualization shape --> |
| 2776 | <TouchSensor description='HAnimSite front_view'/> |
| 2777 | <Shape USE='HAnimSiteShape'/> |
| 2778 | <Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/> |
| 2779 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2780 | <Anchor description='HAnimSite hanim_front_view Viewpoint' url=' "#hanim_front_viewpoint" '> |
| 2781 | <LOD forceTransitions='true' range='0.04'> |
| 2782 | <WorldInfo info='"hide diamond when close"'/> |
| 2783 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2784 | </LOD> |
| 2785 | </Anchor> |
| 2786 | </HAnimSite> |
| 2787 | <HAnimSite DEF='hanim_back_view' containerField='viewpoints' name='back_view' rotation='0 1 0 3.14' translation='0 0.85 -2.58'> |
| 2788 | <!-- HAnimSite visualization shape --> |
| 2789 | <TouchSensor description='HAnimSite back_view'/> |
| 2790 | <Shape USE='HAnimSiteShape'/> |
| 2791 | <Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/> |
| 2792 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2793 | <Anchor description='HAnimSite hanim_back_view Viewpoint' url=' "#hanim_back_viewpoint" '> |
| 2794 | <LOD forceTransitions='true' range='0.04'> |
| 2795 | <WorldInfo info='"hide diamond when close"'/> |
| 2796 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2797 | </LOD> |
| 2798 | </Anchor> |
| 2799 | </HAnimSite> |
| 2800 | <HAnimSite DEF='hanim_l_side_view' containerField='viewpoints' name='l_side_view' rotation='0 1 0 1.5708' translation='2.6 0.854 0'> |
| 2801 | <!-- HAnimSite visualization shape --> |
| 2802 | <TouchSensor description='HAnimSite l_side_view'/> |
| 2803 | <Shape USE='HAnimSiteShape'/> |
| 2804 | <Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/> |
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2806 | <Anchor description='HAnimSite hanim_l_side_view Viewpoint' url=' "#hanim_l_side_viewpoint" '> |
| 2807 | <LOD forceTransitions='true' range='0.04'> |
| 2808 | <WorldInfo info='"hide diamond when close"'/> |
| 2809 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2810 | </LOD> |
| 2811 | </Anchor> |
| 2812 | </HAnimSite> |
| 2813 | <HAnimSite DEF='hanim_Top_view' containerField='viewpoints' name='Top_view' rotation='1 0 0 -1.57' translation='0 3.5 0'> |
| 2814 | <!-- HAnimSite visualization shape --> |
| 2815 | <TouchSensor description='HAnimSite Top_view'/> |
| 2816 | <Shape USE='HAnimSiteShape'/> |
| 2817 | <Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/> |
| 2818 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2819 | <Anchor description='HAnimSite hanim_Top_view Viewpoint' url=' "#hanim_Top_viewpoint" '> |
| 2820 | <LOD forceTransitions='true' range='0.04'> |
| 2821 | <WorldInfo info='"hide diamond when close"'/> |
| 2822 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2823 | </LOD> |
| 2824 | </Anchor> |
| 2825 | </HAnimSite> |
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> |
| 2827 | <HAnimSite DEF='hanim_front_close_view' containerField='viewpoints' name='front_close_view' translation='0 0.854 1.575'> |
| 2828 | <!-- HAnimSite visualization shape --> |
| 2829 | <TouchSensor description='HAnimSite front_close_view'/> |
| 2830 | <Shape USE='HAnimSiteShape'/> |
| 2831 | <Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/> |
| 2832 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2833 | <Anchor description='HAnimSite hanim_front_close_view Viewpoint' url=' "#hanim_front_close_viewpoint" '> |
| 2834 | <LOD forceTransitions='true' range='0.04'> |
| 2835 | <WorldInfo info='"hide diamond when close"'/> |
| 2836 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2837 | </LOD> |
| 2838 | </Anchor> |
| 2839 | </HAnimSite> |
| 2840 | <HAnimSite DEF='hanim_side_close_view' containerField='viewpoints' name='side_close_view' rotation='0 1 0 1.5708' translation='1.56 0.854 0'> |
| 2841 | <!-- HAnimSite visualization shape --> |
| 2842 | <TouchSensor description='HAnimSite side_close_view'/> |
| 2843 | <Shape USE='HAnimSiteShape'/> |
| 2844 | <Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/> |
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2846 | <Anchor description='HAnimSite hanim_side_close_view Viewpoint' url=' "#hanim_side_close_viewpoint" '> |
| 2847 | <LOD forceTransitions='true' range='0.04'> |
| 2848 | <WorldInfo info='"hide diamond when close"'/> |
| 2849 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2850 | </LOD> |
| 2851 | </Anchor> |
| 2852 | </HAnimSite> |
| 2853 | <HAnimSite DEF='hanim_head_front_close_view' containerField='viewpoints' name='head_front_close_view' translation='0 1.5 1'> |
| 2854 | <!-- HAnimSite visualization shape --> |
| 2855 | <TouchSensor description='HAnimSite head_front_close_view'/> |
| 2856 | <Shape USE='HAnimSiteShape'/> |
| 2857 | <Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/> |
| 2858 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2859 | <Anchor description='HAnimSite hanim_head_front_close_view Viewpoint' url=' "#hanim_head_front_close_viewpoint" '> |
| 2860 | <LOD forceTransitions='true' range='0.04'> |
| 2861 | <WorldInfo info='"hide diamond when close"'/> |
| 2862 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2863 | </LOD> |
| 2864 | </Anchor> |
| 2865 | </HAnimSite> |
| 2866 | <HAnimSite DEF='hanim_chest_front_close_view' containerField='viewpoints' name='chest_front_close_view' translation='0 1.2 1'> |
| 2867 | <!-- HAnimSite visualization shape --> |
| 2868 | <TouchSensor description='HAnimSite chest_front_close_view'/> |
| 2869 | <Shape USE='HAnimSiteShape'/> |
| 2870 | <Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/> |
| 2871 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2872 | <Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint' url=' "#hanim_chest_front_close_viewpoint" '> |
| 2873 | <LOD forceTransitions='true' range='0.04'> |
| 2874 | <WorldInfo info='"hide diamond when close"'/> |
| 2875 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2876 | </LOD> |
| 2877 | </Anchor> |
| 2878 | </HAnimSite> |
| 2879 | <HAnimSite DEF='hanim_pelvis_front_close_view' containerField='viewpoints' name='pelvis_front_close_view' translation='0 0.8 1'> |
| 2880 | <!-- HAnimSite visualization shape --> |
| 2881 | <TouchSensor description='HAnimSite pelvis_front_close_view'/> |
| 2882 | <Shape USE='HAnimSiteShape'/> |
| 2883 | <Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/> |
| 2884 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2885 | <Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint' url=' "#hanim_pelvis_front_close_viewpoint" '> |
| 2886 | <LOD forceTransitions='true' range='0.04'> |
| 2887 | <WorldInfo info='"hide diamond when close"'/> |
| 2888 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2889 | </LOD> |
| 2890 | </Anchor> |
| 2891 | </HAnimSite> |
| 2892 | <HAnimSite DEF='hanim_knees_front_close_view' containerField='viewpoints' name='knees_front_close_view' translation='0 0.4 1'> |
| 2893 | <!-- HAnimSite visualization shape --> |
| 2894 | <TouchSensor description='HAnimSite knees_front_close_view'/> |
| 2895 | <Shape USE='HAnimSiteShape'/> |
| 2896 | <Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/> |
| 2897 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2898 | <Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint' url=' "#hanim_knees_front_close_viewpoint" '> |
| 2899 | <LOD forceTransitions='true' range='0.04'> |
| 2900 | <WorldInfo info='"hide diamond when close"'/> |
| 2901 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2902 | </LOD> |
| 2903 | </Anchor> |
| 2904 | </HAnimSite> |
| 2905 | <HAnimSite DEF='hanim_feet_front_close_view' containerField='viewpoints' name='feet_front_close_view' translation='0 0 1'> |
| 2906 | <!-- HAnimSite visualization shape --> |
| 2907 | <TouchSensor description='HAnimSite feet_front_close_view'/> |
| 2908 | <Shape USE='HAnimSiteShape'/> |
| 2909 | <Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/> |
| 2910 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2911 | <Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint' url=' "#hanim_feet_front_close_viewpoint" '> |
| 2912 | <LOD forceTransitions='true' range='0.04'> |
| 2913 | <WorldInfo info='"hide diamond when close"'/> |
| 2914 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2915 | </LOD> |
| 2916 | </Anchor> |
| 2917 | </HAnimSite> |
| 2918 | <!-- right between the eyes, stationary position not animating except with body itself --> |
| 2919 | <HAnimSite DEF='hanim_eye_level_view' containerField='viewpoints' name='eye_level_view' translation='0 1.6332 0.0502'> |
| 2920 | <!-- HAnimSite visualization shape --> |
| 2921 | <TouchSensor description='HAnimSite eye_level_view'/> |
| 2922 | <Shape USE='HAnimSiteShape'/> |
| 2923 | <Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 2924 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2925 | <Anchor description='HAnimSite hanim_eye_level_view Viewpoint' url=' "#hanim_eye_level_viewpoint" '> |
| 2926 | <LOD forceTransitions='true' range='0.04'> |
| 2927 | <WorldInfo info='"hide diamond when close"'/> |
| 2928 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2929 | </LOD> |
| 2930 | </Anchor> |
| 2931 | </HAnimSite> |
| 2932 | <HAnimJoint USE='hanim_humanoid_root' containerField='joints'/> |
| 2933 | <HAnimJoint USE='hanim_sacroiliac' containerField='joints'/> |
| 2934 | <HAnimJoint USE='hanim_vl5' containerField='joints'/> |
| 2935 | <HAnimJoint USE='hanim_vl4' containerField='joints'/> |
| 2936 | <HAnimJoint USE='hanim_vl3' containerField='joints'/> |
| 2937 | <HAnimJoint USE='hanim_vl2' containerField='joints'/> |
| 2938 | <HAnimJoint USE='hanim_vl1' containerField='joints'/> |
| 2939 | <HAnimJoint USE='hanim_vt12' containerField='joints'/> |
| 2940 | <HAnimJoint USE='hanim_vt11' containerField='joints'/> |
| 2941 | <HAnimJoint USE='hanim_vt10' containerField='joints'/> |
| 2942 | <HAnimJoint USE='hanim_vt9' containerField='joints'/> |
| 2943 | <HAnimJoint USE='hanim_vt8' containerField='joints'/> |
| 2944 | <HAnimJoint USE='hanim_vt7' containerField='joints'/> |
| 2945 | <HAnimJoint USE='hanim_vt6' containerField='joints'/> |
| 2946 | <HAnimJoint USE='hanim_vt5' containerField='joints'/> |
| 2947 | <HAnimJoint USE='hanim_vt4' containerField='joints'/> |
| 2948 | <HAnimJoint USE='hanim_vt3' containerField='joints'/> |
| 2949 | <HAnimJoint USE='hanim_vt2' containerField='joints'/> |
| 2950 | <HAnimJoint USE='hanim_vt1' containerField='joints'/> |
| 2951 | <HAnimJoint USE='hanim_vc7' containerField='joints'/> |
| 2952 | <HAnimJoint USE='hanim_vc6' containerField='joints'/> |
| 2953 | <HAnimJoint USE='hanim_vc5' containerField='joints'/> |
| 2954 | <HAnimJoint USE='hanim_vc4' containerField='joints'/> |
| 2955 | <HAnimJoint USE='hanim_vc3' containerField='joints'/> |
| 2956 | <HAnimJoint USE='hanim_vc2' containerField='joints'/> |
| 2957 | <HAnimJoint USE='hanim_vc1' containerField='joints'/> |
| 2958 | <HAnimJoint USE='hanim_skullbase' containerField='joints'/> |
| 2959 | <HAnimJoint USE='hanim_temporomandibular' containerField='joints'/> |
| 2960 | <HAnimJoint USE='hanim_l_acromioclavicular' containerField='joints'/> |
| 2961 | <HAnimJoint USE='hanim_r_acromioclavicular' containerField='joints'/> |
| 2962 | <HAnimJoint USE='hanim_l_ankle' containerField='joints'/> |
| 2963 | <HAnimJoint USE='hanim_r_ankle' containerField='joints'/> |
| 2964 | <HAnimJoint USE='hanim_l_elbow' containerField='joints'/> |
| 2965 | <HAnimJoint USE='hanim_r_elbow' containerField='joints'/> |
| 2966 | <HAnimJoint USE='hanim_l_eyeball_joint' containerField='joints'/> |
| 2967 | <HAnimJoint USE='hanim_r_eyeball_joint' containerField='joints'/> |
| 2968 | <HAnimJoint USE='hanim_l_eyebrow_joint' containerField='joints'/> |
| 2969 | <HAnimJoint USE='hanim_r_eyebrow_joint' containerField='joints'/> |
| 2970 | <HAnimJoint USE='hanim_l_eyelid_joint' containerField='joints'/> |
| 2971 | <HAnimJoint USE='hanim_r_eyelid_joint' containerField='joints'/> |
| 2972 | <HAnimJoint USE='hanim_l_hip' containerField='joints'/> |
| 2973 | <HAnimJoint USE='hanim_r_hip' containerField='joints'/> |
| 2974 | <HAnimJoint USE='hanim_l_index0' containerField='joints'/> |
| 2975 | <HAnimJoint USE='hanim_r_index0' containerField='joints'/> |
| 2976 | <HAnimJoint USE='hanim_l_index1' containerField='joints'/> |
| 2977 | <HAnimJoint USE='hanim_r_index1' containerField='joints'/> |
| 2978 | <HAnimJoint USE='hanim_l_index2' containerField='joints'/> |
| 2979 | <HAnimJoint USE='hanim_r_index2' containerField='joints'/> |
| 2980 | <HAnimJoint USE='hanim_l_index3' containerField='joints'/> |
| 2981 | <HAnimJoint USE='hanim_r_index3' containerField='joints'/> |
| 2982 | <HAnimJoint USE='hanim_l_knee' containerField='joints'/> |
| 2983 | <HAnimJoint USE='hanim_r_knee' containerField='joints'/> |
| 2984 | <HAnimJoint USE='hanim_l_metatarsal' containerField='joints'/> |
| 2985 | <HAnimJoint USE='hanim_r_metatarsal' containerField='joints'/> |
| 2986 | <HAnimJoint USE='hanim_l_middle0' containerField='joints'/> |
| 2987 | <HAnimJoint USE='hanim_r_middle0' containerField='joints'/> |
| 2988 | <HAnimJoint USE='hanim_l_middle1' containerField='joints'/> |
| 2989 | <HAnimJoint USE='hanim_r_middle1' containerField='joints'/> |
| 2990 | <HAnimJoint USE='hanim_l_middle2' containerField='joints'/> |
| 2991 | <HAnimJoint USE='hanim_r_middle2' containerField='joints'/> |
| 2992 | <HAnimJoint USE='hanim_l_middle3' containerField='joints'/> |
| 2993 | <HAnimJoint USE='hanim_r_middle3' containerField='joints'/> |
| 2994 | <HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/> |
| 2995 | <HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/> |
| 2996 | <HAnimJoint USE='hanim_l_pinky0' containerField='joints'/> |
| 2997 | <HAnimJoint USE='hanim_r_pinky0' containerField='joints'/> |
| 2998 | <HAnimJoint USE='hanim_l_pinky1' containerField='joints'/> |
| 2999 | <HAnimJoint USE='hanim_r_pinky1' containerField='joints'/> |
| 3000 | <HAnimJoint USE='hanim_l_pinky2' containerField='joints'/> |
| 3001 | <HAnimJoint USE='hanim_r_pinky2' containerField='joints'/> |
| 3002 | <HAnimJoint USE='hanim_l_pinky3' containerField='joints'/> |
| 3003 | <HAnimJoint USE='hanim_r_pinky3' containerField='joints'/> |
| 3004 | <HAnimJoint USE='hanim_l_ring0' containerField='joints'/> |
| 3005 | <HAnimJoint USE='hanim_r_ring0' containerField='joints'/> |
| 3006 | <HAnimJoint USE='hanim_l_ring1' containerField='joints'/> |
| 3007 | <HAnimJoint USE='hanim_r_ring1' containerField='joints'/> |
| 3008 | <HAnimJoint USE='hanim_l_ring2' containerField='joints'/> |
| 3009 | <HAnimJoint USE='hanim_r_ring2' containerField='joints'/> |
| 3010 | <HAnimJoint USE='hanim_l_ring3' containerField='joints'/> |
| 3011 | <HAnimJoint USE='hanim_r_ring3' containerField='joints'/> |
| 3012 | <HAnimJoint USE='hanim_l_shoulder' containerField='joints'/> |
| 3013 | <HAnimJoint USE='hanim_r_shoulder' containerField='joints'/> |
| 3014 | <HAnimJoint USE='hanim_l_sternoclavicular' containerField='joints'/> |
| 3015 | <HAnimJoint USE='hanim_r_sternoclavicular' containerField='joints'/> |
| 3016 | <HAnimJoint USE='hanim_l_subtalar' containerField='joints'/> |
| 3017 | <HAnimJoint USE='hanim_r_subtalar' containerField='joints'/> |
| 3018 | <HAnimJoint USE='hanim_l_thumb1' containerField='joints'/> |
| 3019 | <HAnimJoint USE='hanim_r_thumb1' containerField='joints'/> |
| 3020 | <HAnimJoint USE='hanim_l_thumb2' containerField='joints'/> |
| 3021 | <HAnimJoint USE='hanim_r_thumb2' containerField='joints'/> |
| 3022 | <HAnimJoint USE='hanim_l_thumb3' containerField='joints'/> |
| 3023 | <HAnimJoint USE='hanim_r_thumb3' containerField='joints'/> |
| 3024 | <HAnimJoint USE='hanim_l_wrist' containerField='joints'/> |
| 3025 | <HAnimJoint USE='hanim_r_wrist' containerField='joints'/> |
| 3026 | <HAnimSegment USE='hanim_pelvis' containerField='segments'/> |
| 3027 | <HAnimSegment USE='hanim_skull' containerField='segments'/> |
| 3028 | <HAnimSegment USE='hanim_jaw' containerField='segments'/> |
| 3029 | <HAnimSegment USE='hanim_c1' containerField='segments'/> |
| 3030 | <HAnimSegment USE='hanim_c2' containerField='segments'/> |
| 3031 | <HAnimSegment USE='hanim_c3' containerField='segments'/> |
| 3032 | <HAnimSegment USE='hanim_c4' containerField='segments'/> |
| 3033 | <HAnimSegment USE='hanim_c5' containerField='segments'/> |
| 3034 | <HAnimSegment USE='hanim_c6' containerField='segments'/> |
| 3035 | <HAnimSegment USE='hanim_c7' containerField='segments'/> |
| 3036 | <HAnimSegment USE='hanim_t1' containerField='segments'/> |
| 3037 | <HAnimSegment USE='hanim_t2' containerField='segments'/> |
| 3038 | <HAnimSegment USE='hanim_t3' containerField='segments'/> |
| 3039 | <HAnimSegment USE='hanim_t4' containerField='segments'/> |
| 3040 | <HAnimSegment USE='hanim_t5' containerField='segments'/> |
| 3041 | <HAnimSegment USE='hanim_t6' containerField='segments'/> |
| 3042 | <HAnimSegment USE='hanim_t7' containerField='segments'/> |
| 3043 | <HAnimSegment USE='hanim_t8' containerField='segments'/> |
| 3044 | <HAnimSegment USE='hanim_t9' containerField='segments'/> |
| 3045 | <HAnimSegment USE='hanim_t10' containerField='segments'/> |
| 3046 | <HAnimSegment USE='hanim_t11' containerField='segments'/> |
| 3047 | <HAnimSegment USE='hanim_t12' containerField='segments'/> |
| 3048 | <HAnimSegment USE='hanim_l1' containerField='segments'/> |
| 3049 | <HAnimSegment USE='hanim_l2' containerField='segments'/> |
| 3050 | <HAnimSegment USE='hanim_l3' containerField='segments'/> |
| 3051 | <HAnimSegment USE='hanim_l4' containerField='segments'/> |
| 3052 | <HAnimSegment USE='hanim_l5' containerField='segments'/> |
| 3053 | <HAnimSegment USE='hanim_sacrum' containerField='segments'/> |
| 3054 | <HAnimSegment USE='hanim_l_calf' containerField='segments'/> |
| 3055 | <HAnimSegment USE='hanim_r_calf' containerField='segments'/> |
| 3056 | <HAnimSegment USE='hanim_l_clavicle' containerField='segments'/> |
| 3057 | <HAnimSegment USE='hanim_r_clavicle' containerField='segments'/> |
| 3058 | <HAnimSegment USE='hanim_l_eyeball' containerField='segments'/> |
| 3059 | <HAnimSegment USE='hanim_r_eyeball' containerField='segments'/> |
| 3060 | <HAnimSegment USE='hanim_l_eyebrow' containerField='segments'/> |
| 3061 | <HAnimSegment USE='hanim_r_eyebrow' containerField='segments'/> |
| 3062 | <HAnimSegment USE='hanim_l_eyelid' containerField='segments'/> |
| 3063 | <HAnimSegment USE='hanim_r_eyelid' containerField='segments'/> |
| 3064 | <HAnimSegment USE='hanim_l_forearm' containerField='segments'/> |
| 3065 | <HAnimSegment USE='hanim_r_forearm' containerField='segments'/> |
| 3066 | <HAnimSegment USE='hanim_l_forefoot' containerField='segments'/> |
| 3067 | <HAnimSegment USE='hanim_r_forefoot' containerField='segments'/> |
| 3068 | <HAnimSegment USE='hanim_l_hand' containerField='segments'/> |
| 3069 | <HAnimSegment USE='hanim_r_hand' containerField='segments'/> |
| 3070 | <HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/> |
| 3071 | <HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/> |
| 3072 | <HAnimSegment USE='hanim_l_index_distal' containerField='segments'/> |
| 3073 | <HAnimSegment USE='hanim_r_index_distal' containerField='segments'/> |
| 3074 | <HAnimSegment USE='hanim_l_index_metacarpal' containerField='segments'/> |
| 3075 | <HAnimSegment USE='hanim_r_index_metacarpal' containerField='segments'/> |
| 3076 | <HAnimSegment USE='hanim_l_index_middle' containerField='segments'/> |
| 3077 | <HAnimSegment USE='hanim_r_index_middle' containerField='segments'/> |
| 3078 | <HAnimSegment USE='hanim_l_index_proximal' containerField='segments'/> |
| 3079 | <HAnimSegment USE='hanim_r_index_proximal' containerField='segments'/> |
| 3080 | <HAnimSegment USE='hanim_l_middistal' containerField='segments'/> |
| 3081 | <HAnimSegment USE='hanim_r_middistal' containerField='segments'/> |
| 3082 | <HAnimSegment USE='hanim_l_middle_distal' containerField='segments'/> |
| 3083 | <HAnimSegment USE='hanim_r_middle_distal' containerField='segments'/> |
| 3084 | <HAnimSegment USE='hanim_l_middle_metacarpal' containerField='segments'/> |
| 3085 | <HAnimSegment USE='hanim_r_middle_metacarpal' containerField='segments'/> |
| 3086 | <HAnimSegment USE='hanim_l_middle_middle' containerField='segments'/> |
| 3087 | <HAnimSegment USE='hanim_r_middle_middle' containerField='segments'/> |
| 3088 | <HAnimSegment USE='hanim_l_middle_proximal' containerField='segments'/> |
| 3089 | <HAnimSegment USE='hanim_r_middle_proximal' containerField='segments'/> |
| 3090 | <HAnimSegment USE='hanim_l_midproximal' containerField='segments'/> |
| 3091 | <HAnimSegment USE='hanim_r_midproximal' containerField='segments'/> |
| 3092 | <HAnimSegment USE='hanim_l_pinky_distal' containerField='segments'/> |
| 3093 | <HAnimSegment USE='hanim_r_pinky_distal' containerField='segments'/> |
| 3094 | <HAnimSegment USE='hanim_l_pinky_metacarpal' containerField='segments'/> |
| 3095 | <HAnimSegment USE='hanim_r_pinky_metacarpal' containerField='segments'/> |
| 3096 | <HAnimSegment USE='hanim_l_pinky_middle' containerField='segments'/> |
| 3097 | <HAnimSegment USE='hanim_r_pinky_middle' containerField='segments'/> |
| 3098 | <HAnimSegment USE='hanim_l_pinky_proximal' containerField='segments'/> |
| 3099 | <HAnimSegment USE='hanim_r_pinky_proximal' containerField='segments'/> |
| 3100 | <HAnimSegment USE='hanim_l_ring_distal' containerField='segments'/> |
| 3101 | <HAnimSegment USE='hanim_r_ring_distal' containerField='segments'/> |
| 3102 | <HAnimSegment USE='hanim_l_ring_metacarpal' containerField='segments'/> |
| 3103 | <HAnimSegment USE='hanim_r_ring_metacarpal' containerField='segments'/> |
| 3104 | <HAnimSegment USE='hanim_l_ring_middle' containerField='segments'/> |
| 3105 | <HAnimSegment USE='hanim_r_ring_middle' containerField='segments'/> |
| 3106 | <HAnimSegment USE='hanim_l_ring_proximal' containerField='segments'/> |
| 3107 | <HAnimSegment USE='hanim_r_ring_proximal' containerField='segments'/> |
| 3108 | <HAnimSegment USE='hanim_l_scapula' containerField='segments'/> |
| 3109 | <HAnimSegment USE='hanim_r_scapula' containerField='segments'/> |
| 3110 | <HAnimSegment USE='hanim_l_thigh' containerField='segments'/> |
| 3111 | <HAnimSegment USE='hanim_r_thigh' containerField='segments'/> |
| 3112 | <HAnimSegment USE='hanim_l_thumb_distal' containerField='segments'/> |
| 3113 | <HAnimSegment USE='hanim_r_thumb_distal' containerField='segments'/> |
| 3114 | <HAnimSegment USE='hanim_l_thumb_metacarpal' containerField='segments'/> |
| 3115 | <HAnimSegment USE='hanim_r_thumb_metacarpal' containerField='segments'/> |
| 3116 | <HAnimSegment USE='hanim_l_thumb_proximal' containerField='segments'/> |
| 3117 | <HAnimSegment USE='hanim_r_thumb_proximal' containerField='segments'/> |
| 3118 | <HAnimSegment USE='hanim_l_upperarm' containerField='segments'/> |
| 3119 | <HAnimSegment USE='hanim_r_upperarm' containerField='segments'/> |
| 3120 | <HAnimSite USE='hanim_crotch_pt' containerField='sites'/> |
| 3121 | <HAnimSite USE='hanim_skull_tip' containerField='sites'/> |
| 3122 | <HAnimSite USE='hanim_sellion_pt' containerField='sites'/> |
| 3123 | <HAnimSite USE='hanim_supramenton_pt' containerField='sites'/> |
| 3124 | <HAnimSite USE='hanim_nuchale_pt' containerField='sites'/> |
| 3125 | <HAnimSite USE='hanim_suprasternale_pt' containerField='sites'/> |
| 3126 | <HAnimSite USE='hanim_cervicale_pt' containerField='sites'/> |
| 3127 | <HAnimSite USE='hanim_substernale_pt' containerField='sites'/> |
| 3128 | <HAnimSite USE='hanim_rib10_midspine_pt' containerField='sites'/> |
| 3129 | <HAnimSite USE='hanim_waist_preferred_post_pt' containerField='sites'/> |
| 3130 | <HAnimSite USE='hanim_navel_pt' containerField='sites'/> |
| 3131 | <HAnimSite USE='hanim_l_acromion_pt' containerField='sites'/> |
| 3132 | <HAnimSite USE='hanim_r_acromion_pt' containerField='sites'/> |
| 3133 | <HAnimSite USE='hanim_r_asis_pt' containerField='sites'/> |
| 3134 | <HAnimSite USE='hanim_l_asis_pt' containerField='sites'/> |
| 3135 | <HAnimSite USE='hanim_l_axilla_ant_pt' containerField='sites'/> |
| 3136 | <HAnimSite USE='hanim_r_axilla_ant_pt' containerField='sites'/> |
| 3137 | <HAnimSite USE='hanim_l_axilla_post_pt' containerField='sites'/> |
| 3138 | <HAnimSite USE='hanim_r_axilla_post_pt' containerField='sites'/> |
| 3139 | <HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/> |
| 3140 | <HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/> |
| 3141 | <HAnimSite USE='hanim_l_clavicale_pt' containerField='sites'/> |
| 3142 | <HAnimSite USE='hanim_r_clavicale_pt' containerField='sites'/> |
| 3143 | <HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/> |
| 3144 | <HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/> |
| 3145 | <HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/> |
| 3146 | <HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/> |
| 3147 | <HAnimSite USE='hanim_l_eyeball_site_view' containerField='viewpoints'/> |
| 3148 | <HAnimSite USE='hanim_r_eyeball_site_view' containerField='viewpoints'/> |
| 3149 | <HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/> |
| 3150 | <HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/> |
| 3151 | <HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/> |
| 3152 | <HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/> |
| 3153 | <HAnimSite USE='hanim_l_forefoot_tip' containerField='sites'/> |
| 3154 | <HAnimSite USE='hanim_r_forefoot_tip' containerField='sites'/> |
| 3155 | <HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/> |
| 3156 | <HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/> |
| 3157 | <HAnimSite USE='hanim_l_hand_front_view' containerField='viewpoints'/> |
| 3158 | <HAnimSite USE='hanim_r_hand_front_view' containerField='viewpoints'/> |
| 3159 | <HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/> |
| 3160 | <HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/> |
| 3161 | <HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/> |
| 3162 | <HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/> |
| 3163 | <HAnimSite USE='hanim_r_iliocristale_pt' containerField='sites'/> |
| 3164 | <HAnimSite USE='hanim_l_iliocristale_pt' containerField='sites'/> |
| 3165 | <HAnimSite USE='hanim_l_index_distal_tip' containerField='sites'/> |
| 3166 | <HAnimSite USE='hanim_r_index_distal_tip' containerField='sites'/> |
| 3167 | <HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/> |
| 3168 | <HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/> |
| 3169 | <HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/> |
| 3170 | <HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/> |
| 3171 | <HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/> |
| 3172 | <HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/> |
| 3173 | <HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/> |
| 3174 | <HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/> |
| 3175 | <HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/> |
| 3176 | <HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/> |
| 3177 | <HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/> |
| 3178 | <HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/> |
| 3179 | <HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/> |
| 3180 | <HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/> |
| 3181 | <HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/> |
| 3182 | <HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/> |
| 3183 | <HAnimSite USE='hanim_l_middle_distal_tip' containerField='sites'/> |
| 3184 | <HAnimSite USE='hanim_r_middle_distal_tip' containerField='sites'/> |
| 3185 | <HAnimSite USE='hanim_r_neck_base_pt' containerField='sites'/> |
| 3186 | <HAnimSite USE='hanim_l_neck_base_pt' containerField='sites'/> |
| 3187 | <HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/> |
| 3188 | <HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/> |
| 3189 | <HAnimSite USE='hanim_l_pinky_distal_tip' containerField='sites'/> |
| 3190 | <HAnimSite USE='hanim_r_pinky_distal_tip' containerField='sites'/> |
| 3191 | <HAnimSite USE='hanim_r_psis_pt' containerField='sites'/> |
| 3192 | <HAnimSite USE='hanim_l_psis_pt' containerField='sites'/> |
| 3193 | <HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/> |
| 3194 | <HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/> |
| 3195 | <HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/> |
| 3196 | <HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/> |
| 3197 | <HAnimSite USE='hanim_r_rib10_pt' containerField='sites'/> |
| 3198 | <HAnimSite USE='hanim_l_rib10_pt' containerField='sites'/> |
| 3199 | <HAnimSite USE='hanim_l_ring_distal_tip' containerField='sites'/> |
| 3200 | <HAnimSite USE='hanim_r_ring_distal_tip' containerField='sites'/> |
| 3201 | <HAnimSite USE='hanim_temporomandibular_l_site_pt' containerField='sites'/> |
| 3202 | <HAnimSite USE='hanim_temporomandibular_r_site_pt' containerField='sites'/> |
| 3203 | <HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/> |
| 3204 | <HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/> |
| 3205 | <HAnimSite USE='hanim_r_thelion_pt' containerField='sites'/> |
| 3206 | <HAnimSite USE='hanim_l_thelion_pt' containerField='sites'/> |
| 3207 | <HAnimSite USE='hanim_l_thumb_distal_tip' containerField='sites'/> |
| 3208 | <HAnimSite USE='hanim_r_thumb_distal_tip' containerField='sites'/> |
| 3209 | <HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/> |
| 3210 | <HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/> |
| 3211 | <HAnimSite USE='hanim_r_trochanterion_pt' containerField='sites'/> |
| 3212 | <HAnimSite USE='hanim_l_trochanterion_pt' containerField='sites'/> |
| 3213 | <HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/> |
| 3214 | <HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/> |
| 3215 | </HAnimHumanoid> |
| 3216 | </Scene> |
| 3217 | </X3D> |
=============================================================================================================================
HAnimHumanoid hanim_humanoid skeleton holds X3D3 HAnim1 joints/segments/sites.
[key] jointname : segmentname ^ sitename
[nodes] HAnimJoint (94), : HAnimSegment (94), % HAnimDisplacer (0), $ HAnimMotion (0), ^ HAnimSite (109), @ skin nodes (0)
=============================================================================================================================
HAnimHumanoid DEF='hanim_humanoid name='humanoid' loa=''
skeleton
humanoid_root : sacrum
sacroiliac : pelvis ^ r_iliocristale_pt, r_trochanterion_pt, l_iliocristale_pt, l_trochanterion_pt, r_asis_pt, l_asis_pt, r_psis_pt, l_psis_pt, crotch_pt
| l_hip : l_thigh ^ l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
| | l_knee : l_calf
| | l_ankle : l_hindfoot ^ l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
| | l_subtalar : l_midproximal
| | l_midtarsal : l_middistal ^ l_metatarsal_pha1_pt
| | l_metatarsal : l_forefoot ^ l_forefoot_tip, l_metatarsal_pha5_pt, l_digit2_pt
| r_hip : r_thigh ^ r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
| r_knee : r_calf
| r_ankle : r_hindfoot ^ r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
| r_subtalar : r_midproximal
| r_midtarsal : r_middistal ^ r_metatarsal_pha1_pt
| r_metatarsal : r_forefoot ^ r_forefoot_tip, r_metatarsal_pha5_pt, r_digit2_pt
vl5 : l5 ^ waist_preferred_post_pt, navel_pt
vl4 : l4
vl3 : l3
vl2 : l2 ^ r_rib10_pt, l_rib10_pt, rib10_midspine_pt
vl1 : l1
vt12 : t12
vt11 : t11
vt10 : t10 ^ substernale_pt
vt9 : t9 ^ r_thelion_pt, l_thelion_pt
vt8 : t8
vt7 : t7
vt6 : t6
vt5 : t5
vt4 : t4
vt3 : t3
vt2 : t2
vt1 : t1 ^ suprasternale_pt, cervicale_pt
vc7 : c7 ^ r_neck_base_pt, l_neck_base_pt
| vc6 : c6
| vc5 : c5
| vc4 : c4
| vc3 : c3
| vc2 : c2
| vc1 : c1
| skullbase : skull ^ skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
| l_eyeball_joint : l_eyeball ^ l_eyeball_site_view
| l_eyelid_joint : l_eyelid
| l_eyebrow_joint : l_eyebrow
| r_eyeball_joint : r_eyeball ^ r_eyeball_site_view
| r_eyelid_joint : r_eyelid
| r_eyebrow_joint : r_eyebrow
| temporomandibular : jaw ^ temporomandibular_l_site_pt, temporomandibular_r_site_pt
l_sternoclavicular : l_clavicle ^ l_clavicale_pt, l_acromion_pt, l_axilla_ant_pt, l_axilla_post_pt
| l_acromioclavicular : l_scapula
| l_shoulder : l_upperarm ^ l_humeral_lateral_epicn_pt
| l_elbow : l_forearm ^ l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
| l_wrist : l_hand ^ l_metacarpal_pha2_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt, l_hand_front_view
| l_thumb1 : l_thumb_metacarpal
| | l_thumb2 : l_thumb_proximal
| | l_thumb3 : l_thumb_distal ^ l_thumb_distal_tip
| l_index0 : l_index_metacarpal
| | l_index1 : l_index_proximal
| | l_index2 : l_index_middle
| | l_index3 : l_index_distal ^ l_index_distal_tip, l_dactylion_pt
| l_middle0 : l_middle_metacarpal
| | l_middle1 : l_middle_proximal
| | l_middle2 : l_middle_middle
| | l_middle3 : l_middle_distal ^ l_middle_distal_tip
| l_ring0 : l_ring_metacarpal
| | l_ring1 : l_ring_proximal
| | l_ring2 : l_ring_middle
| | l_ring3 : l_ring_distal ^ l_ring_distal_tip
| l_pinky0 : l_pinky_metacarpal
| l_pinky1 : l_pinky_proximal
| l_pinky2 : l_pinky_middle
| l_pinky3 : l_pinky_distal ^ l_pinky_distal_tip
r_sternoclavicular : r_clavicle ^ r_clavicale_pt, r_acromion_pt, r_axilla_ant_pt, r_axilla_post_pt
r_acromioclavicular : r_scapula
r_shoulder : r_upperarm ^ r_humeral_lateral_epicn_pt
r_elbow : r_forearm ^ r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
r_wrist : r_hand ^ r_metacarpal_pha2_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt, r_hand_front_view
r_thumb1 : r_thumb_metacarpal
| r_thumb2 : r_thumb_proximal
| r_thumb3 : r_thumb_distal ^ r_thumb_distal_tip
r_index0 : r_index_metacarpal
| r_index1 : r_index_proximal
| r_index2 : r_index_middle
| r_index3 : r_index_distal ^ r_index_distal_tip, r_dactylion_pt
r_middle0 : r_middle_metacarpal
| r_middle1 : r_middle_proximal
| r_middle2 : r_middle_middle
| r_middle3 : r_middle_distal ^ r_middle_distal_tip
r_ring0 : r_ring_metacarpal
| r_ring1 : r_ring_proximal
| r_ring2 : r_ring_middle
| r_ring3 : r_ring_distal ^ r_ring_distal_tip
r_pinky0 : r_pinky_metacarpal
r_pinky1 : r_pinky_proximal
r_pinky2 : r_pinky_middle
r_pinky3 : r_pinky_distal ^ r_pinky_distal_tip
^ HAnimHumanoid humanoid holds 14 HAnimSite nodes: l_inclined_view, r_inclined_view, front_view, back_view, l_side_view, Top_view, front_close_view, side_close_view, head_front_close_view, chest_front_close_view, pelvis_front_close_view, knees_front_close_view, feet_front_close_view, eye_level_view
^ HAnimSegment pelvis holds 9 HAnimSite nodes: r_iliocristale_pt, r_trochanterion_pt, l_iliocristale_pt, l_trochanterion_pt, r_asis_pt, l_asis_pt, r_psis_pt, l_psis_pt, crotch_pt
^ HAnimSegment l_thigh holds 3 HAnimSite nodes: l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
^ HAnimSegment l_hindfoot holds 4 HAnimSite nodes: l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
^ HAnimSegment l_middistal holds 1 HAnimSite node: l_metatarsal_pha1_pt
^ HAnimSegment l_forefoot holds 3 HAnimSite nodes: l_forefoot_tip, l_metatarsal_pha5_pt, l_digit2_pt
^ HAnimSegment r_thigh holds 3 HAnimSite nodes: r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
^ HAnimSegment r_hindfoot holds 4 HAnimSite nodes: r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
^ HAnimSegment r_middistal holds 1 HAnimSite node: r_metatarsal_pha1_pt
^ HAnimSegment r_forefoot holds 3 HAnimSite nodes: r_forefoot_tip, r_metatarsal_pha5_pt, r_digit2_pt
^ HAnimSegment l5 holds 2 HAnimSite nodes: waist_preferred_post_pt, navel_pt
^ HAnimSegment l2 holds 3 HAnimSite nodes: r_rib10_pt, l_rib10_pt, rib10_midspine_pt
^ HAnimSegment t10 holds 1 HAnimSite node: substernale_pt
^ HAnimSegment t9 holds 2 HAnimSite nodes: r_thelion_pt, l_thelion_pt
^ HAnimSegment t1 holds 2 HAnimSite nodes: suprasternale_pt, cervicale_pt
^ HAnimSegment c7 holds 2 HAnimSite nodes: r_neck_base_pt, l_neck_base_pt
^ HAnimSegment skull holds 10 HAnimSite nodes: skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
^ HAnimSegment l_eyeball holds 1 HAnimSite node: l_eyeball_site_view
^ HAnimSegment r_eyeball holds 1 HAnimSite node: r_eyeball_site_view
^ HAnimSegment jaw holds 2 HAnimSite nodes: temporomandibular_l_site_pt, temporomandibular_r_site_pt
^ HAnimSegment l_clavicle holds 4 HAnimSite nodes: l_clavicale_pt, l_acromion_pt, l_axilla_ant_pt, l_axilla_post_pt
^ HAnimSegment l_upperarm holds 1 HAnimSite node: l_humeral_lateral_epicn_pt
^ HAnimSegment l_forearm holds 4 HAnimSite nodes: l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
^ HAnimSegment l_hand holds 4 HAnimSite nodes: l_metacarpal_pha2_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt, l_hand_front_view
^ HAnimSegment l_thumb_distal holds 1 HAnimSite node: l_thumb_distal_tip
^ HAnimSegment l_index_distal holds 2 HAnimSite nodes: l_index_distal_tip, l_dactylion_pt
^ HAnimSegment l_middle_distal holds 1 HAnimSite node: l_middle_distal_tip
^ HAnimSegment l_ring_distal holds 1 HAnimSite node: l_ring_distal_tip
^ HAnimSegment l_pinky_distal holds 1 HAnimSite node: l_pinky_distal_tip
^ HAnimSegment r_clavicle holds 4 HAnimSite nodes: r_clavicale_pt, r_acromion_pt, r_axilla_ant_pt, r_axilla_post_pt
^ HAnimSegment r_upperarm holds 1 HAnimSite node: r_humeral_lateral_epicn_pt
^ HAnimSegment r_forearm holds 4 HAnimSite nodes: r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
^ HAnimSegment r_hand holds 4 HAnimSite nodes: r_metacarpal_pha2_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt, r_hand_front_view
^ HAnimSegment r_thumb_distal holds 1 HAnimSite node: r_thumb_distal_tip
^ HAnimSegment r_index_distal holds 2 HAnimSite nodes: r_index_distal_tip, r_dactylion_pt
^ HAnimSegment r_middle_distal holds 1 HAnimSite node: r_middle_distal_tip
^ HAnimSegment r_ring_distal holds 1 HAnimSite node: r_ring_distal_tip
^ HAnimSegment r_pinky_distal holds 1 HAnimSite node: r_pinky_distal_tip
=============================================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes. Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
| <HAnimHumanoid DEF='hanim_humanoid' name='humanoid' version ='1.0' | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| info=' | "authorName=Matthew T. Beitler Joe D. Williams Don Brutzman" "authorEmail=HAnim@web3D.org" "copyright=none" "creationDate=12 May 1999" "usageRestrictions=none" "humanoidVersion=2.0" "height=1.7504" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2749 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2753 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2750 | <TouchSensor description='HAnimSite l_inclined_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2751 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2752 | <Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2754 | <Anchor description='HAnimSite hanim_l_inclined_view Viewpoint' url=' "#hanim_l_inclined_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2755 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2756 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2757 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2758 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2759 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2749 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2753 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2762 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2766 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2763 | <TouchSensor description='HAnimSite r_inclined_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2764 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2765 | <Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2767 | <Anchor description='HAnimSite hanim_r_inclined_view Viewpoint' url=' "#hanim_r_inclined_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2768 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2769 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2770 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2771 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2772 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2762 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2766 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2775 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2779 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2776 | <TouchSensor description='HAnimSite front_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2777 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2778 | <Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2780 | <Anchor description='HAnimSite hanim_front_view Viewpoint' url=' "#hanim_front_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2781 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2782 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2783 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2784 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2785 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2775 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2779 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2788 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2792 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2789 | <TouchSensor description='HAnimSite back_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2790 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2791 | <Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2793 | <Anchor description='HAnimSite hanim_back_view Viewpoint' url=' "#hanim_back_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2794 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2795 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2796 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2797 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2798 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2788 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2792 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2801 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2802 | <TouchSensor description='HAnimSite l_side_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2803 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2804 | <Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2806 | <Anchor description='HAnimSite hanim_l_side_view Viewpoint' url=' "#hanim_l_side_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2807 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2808 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2809 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2810 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2811 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2801 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2814 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2818 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2815 | <TouchSensor description='HAnimSite Top_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2816 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2817 | <Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2819 | <Anchor description='HAnimSite hanim_Top_view Viewpoint' url=' "#hanim_Top_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2820 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2821 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2822 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2823 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2824 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2814 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2818 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2828 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2832 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2829 | <TouchSensor description='HAnimSite front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2830 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2831 | <Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2833 | <Anchor description='HAnimSite hanim_front_close_view Viewpoint' url=' "#hanim_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2834 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2835 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2836 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2837 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2838 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2828 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2832 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2841 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2842 | <TouchSensor description='HAnimSite side_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2843 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2844 | <Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2846 | <Anchor description='HAnimSite hanim_side_close_view Viewpoint' url=' "#hanim_side_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2847 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2848 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2849 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2850 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2851 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2841 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2854 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2858 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2855 | <TouchSensor description='HAnimSite head_front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2856 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2857 | <Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2859 | <Anchor description='HAnimSite hanim_head_front_close_view Viewpoint' url=' "#hanim_head_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2860 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2861 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2862 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2863 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2864 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2854 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2858 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2867 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2871 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2868 | <TouchSensor description='HAnimSite chest_front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2869 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2870 | <Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2872 | <Anchor description='HAnimSite hanim_chest_front_close_view Viewpoint' url=' "#hanim_chest_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2873 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2874 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2875 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2876 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2877 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2867 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2871 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2880 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2884 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2881 | <TouchSensor description='HAnimSite pelvis_front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2882 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2883 | <Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2885 | <Anchor description='HAnimSite hanim_pelvis_front_close_view Viewpoint' url=' "#hanim_pelvis_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2886 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2887 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2888 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2889 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2890 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2880 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2884 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2893 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2897 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2894 | <TouchSensor description='HAnimSite knees_front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2895 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2896 | <Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2898 | <Anchor description='HAnimSite hanim_knees_front_close_view Viewpoint' url=' "#hanim_knees_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2899 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2900 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2901 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2902 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2903 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2893 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2897 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2906 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2910 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2907 | <TouchSensor description='HAnimSite feet_front_close_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2908 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2909 | <Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2911 | <Anchor description='HAnimSite hanim_feet_front_close_view Viewpoint' url=' "#hanim_feet_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2912 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2913 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2914 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2915 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2916 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2906 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2910 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 55 | <!-- Only one root HAnimJoint is expected --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <!-- USE nodes go here for access by inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <!-- Top-level HAnimSite/Viewpoint nodes that move with the human center but are unaffected by body animation --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <!-- TODO move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations, if so also revert containerField to default --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2918 | <!-- right between the eyes, stationary position not animating except with body itself --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2920 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2924 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2921 | <TouchSensor description='HAnimSite eye_level_view'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2922 | <Shape USE='HAnimSiteShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2923 | <Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2925 | <Anchor description='HAnimSite hanim_eye_level_view Viewpoint' url=' "#hanim_eye_level_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2926 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2927 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2928 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2929 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2930 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2920 | <!-- HAnimSite visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2924 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2932 |
<HAnimJoint USE='hanim_humanoid_root' containerField='joints'/>
|
2933 |
<HAnimJoint USE='hanim_sacroiliac' containerField='joints'/>
|
2934 |
<HAnimJoint USE='hanim_vl5' containerField='joints'/>
|
2935 |
<HAnimJoint USE='hanim_vl4' containerField='joints'/>
|
2936 |
<HAnimJoint USE='hanim_vl3' containerField='joints'/>
|
2937 |
<HAnimJoint USE='hanim_vl2' containerField='joints'/>
|
2938 |
<HAnimJoint USE='hanim_vl1' containerField='joints'/>
|
2939 |
<HAnimJoint USE='hanim_vt12' containerField='joints'/>
|
2940 |
<HAnimJoint USE='hanim_vt11' containerField='joints'/>
|
2941 |
<HAnimJoint USE='hanim_vt10' containerField='joints'/>
|
2942 |
<HAnimJoint USE='hanim_vt9' containerField='joints'/>
|
2943 |
<HAnimJoint USE='hanim_vt8' containerField='joints'/>
|
2944 |
<HAnimJoint USE='hanim_vt7' containerField='joints'/>
|
2945 |
<HAnimJoint USE='hanim_vt6' containerField='joints'/>
|
2946 |
<HAnimJoint USE='hanim_vt5' containerField='joints'/>
|
2947 |
<HAnimJoint USE='hanim_vt4' containerField='joints'/>
|
2948 |
<HAnimJoint USE='hanim_vt3' containerField='joints'/>
|
2949 |
<HAnimJoint USE='hanim_vt2' containerField='joints'/>
|
2950 |
<HAnimJoint USE='hanim_vt1' containerField='joints'/>
|
2951 |
<HAnimJoint USE='hanim_vc7' containerField='joints'/>
|
2952 |
<HAnimJoint USE='hanim_vc6' containerField='joints'/>
|
2953 |
<HAnimJoint USE='hanim_vc5' containerField='joints'/>
|
2954 |
<HAnimJoint USE='hanim_vc4' containerField='joints'/>
|
2955 |
<HAnimJoint USE='hanim_vc3' containerField='joints'/>
|
2956 |
<HAnimJoint USE='hanim_vc2' containerField='joints'/>
|
2957 |
<HAnimJoint USE='hanim_vc1' containerField='joints'/>
|
2958 |
<HAnimJoint USE='hanim_skullbase' containerField='joints'/>
|
2959 |
<HAnimJoint USE='hanim_temporomandibular' containerField='joints'/>
|
2960 |
<HAnimJoint USE='hanim_l_acromioclavicular' containerField='joints'/>
|
2961 |
<HAnimJoint USE='hanim_r_acromioclavicular' containerField='joints'/>
|
2962 |
<HAnimJoint USE='hanim_l_ankle' containerField='joints'/>
|
2963 |
<HAnimJoint USE='hanim_r_ankle' containerField='joints'/>
|
2964 |
<HAnimJoint USE='hanim_l_elbow' containerField='joints'/>
|
2965 |
<HAnimJoint USE='hanim_r_elbow' containerField='joints'/>
|
2966 |
<HAnimJoint USE='hanim_l_eyeball_joint' containerField='joints'/>
|
2967 |
<HAnimJoint USE='hanim_r_eyeball_joint' containerField='joints'/>
|
2968 |
<HAnimJoint USE='hanim_l_eyebrow_joint' containerField='joints'/>
|
2969 |
<HAnimJoint USE='hanim_r_eyebrow_joint' containerField='joints'/>
|
2970 |
<HAnimJoint USE='hanim_l_eyelid_joint' containerField='joints'/>
|
2971 |
<HAnimJoint USE='hanim_r_eyelid_joint' containerField='joints'/>
|
2972 |
<HAnimJoint USE='hanim_l_hip' containerField='joints'/>
|
2973 |
<HAnimJoint USE='hanim_r_hip' containerField='joints'/>
|
2974 |
<HAnimJoint USE='hanim_l_index0' containerField='joints'/>
|
2975 |
<HAnimJoint USE='hanim_r_index0' containerField='joints'/>
|
2976 |
<HAnimJoint USE='hanim_l_index1' containerField='joints'/>
|
2977 |
<HAnimJoint USE='hanim_r_index1' containerField='joints'/>
|
2978 |
<HAnimJoint USE='hanim_l_index2' containerField='joints'/>
|
2979 |
<HAnimJoint USE='hanim_r_index2' containerField='joints'/>
|
2980 |
<HAnimJoint USE='hanim_l_index3' containerField='joints'/>
|
2981 |
<HAnimJoint USE='hanim_r_index3' containerField='joints'/>
|
2982 |
<HAnimJoint USE='hanim_l_knee' containerField='joints'/>
|
2983 |
<HAnimJoint USE='hanim_r_knee' containerField='joints'/>
|
2984 |
<HAnimJoint USE='hanim_l_metatarsal' containerField='joints'/>
|
2985 |
<HAnimJoint USE='hanim_r_metatarsal' containerField='joints'/>
|
2986 |
<HAnimJoint USE='hanim_l_middle0' containerField='joints'/>
|
2987 |
<HAnimJoint USE='hanim_r_middle0' containerField='joints'/>
|
2988 |
<HAnimJoint USE='hanim_l_middle1' containerField='joints'/>
|
2989 |
<HAnimJoint USE='hanim_r_middle1' containerField='joints'/>
|
2990 |
<HAnimJoint USE='hanim_l_middle2' containerField='joints'/>
|
2991 |
<HAnimJoint USE='hanim_r_middle2' containerField='joints'/>
|
2992 |
<HAnimJoint USE='hanim_l_middle3' containerField='joints'/>
|
2993 |
<HAnimJoint USE='hanim_r_middle3' containerField='joints'/>
|
2994 |
<HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/>
|
2995 |
<HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/>
|
2996 |
<HAnimJoint USE='hanim_l_pinky0' containerField='joints'/>
|
2997 |
<HAnimJoint USE='hanim_r_pinky0' containerField='joints'/>
|
2998 |
<HAnimJoint USE='hanim_l_pinky1' containerField='joints'/>
|
2999 |
<HAnimJoint USE='hanim_r_pinky1' containerField='joints'/>
|
3000 |
<HAnimJoint USE='hanim_l_pinky2' containerField='joints'/>
|
3001 |
<HAnimJoint USE='hanim_r_pinky2' containerField='joints'/>
|
3002 |
<HAnimJoint USE='hanim_l_pinky3' containerField='joints'/>
|
3003 |
<HAnimJoint USE='hanim_r_pinky3' containerField='joints'/>
|
3004 |
<HAnimJoint USE='hanim_l_ring0' containerField='joints'/>
|
3005 |
<HAnimJoint USE='hanim_r_ring0' containerField='joints'/>
|
3006 |
<HAnimJoint USE='hanim_l_ring1' containerField='joints'/>
|
3007 |
<HAnimJoint USE='hanim_r_ring1' containerField='joints'/>
|
3008 |
<HAnimJoint USE='hanim_l_ring2' containerField='joints'/>
|
3009 |
<HAnimJoint USE='hanim_r_ring2' containerField='joints'/>
|
3010 |
<HAnimJoint USE='hanim_l_ring3' containerField='joints'/>
|
3011 |
<HAnimJoint USE='hanim_r_ring3' containerField='joints'/>
|
3012 |
<HAnimJoint USE='hanim_l_shoulder' containerField='joints'/>
|
3013 |
<HAnimJoint USE='hanim_r_shoulder' containerField='joints'/>
|
3014 |
<HAnimJoint USE='hanim_l_sternoclavicular' containerField='joints'/>
|
3015 |
<HAnimJoint USE='hanim_r_sternoclavicular' containerField='joints'/>
|
3016 |
<HAnimJoint USE='hanim_l_subtalar' containerField='joints'/>
|
3017 |
<HAnimJoint USE='hanim_r_subtalar' containerField='joints'/>
|
3018 |
<HAnimJoint USE='hanim_l_thumb1' containerField='joints'/>
|
3019 |
<HAnimJoint USE='hanim_r_thumb1' containerField='joints'/>
|
3020 |
<HAnimJoint USE='hanim_l_thumb2' containerField='joints'/>
|
3021 |
<HAnimJoint USE='hanim_r_thumb2' containerField='joints'/>
|
3022 |
<HAnimJoint USE='hanim_l_thumb3' containerField='joints'/>
|
3023 |
<HAnimJoint USE='hanim_r_thumb3' containerField='joints'/>
|
3024 |
<HAnimJoint USE='hanim_l_wrist' containerField='joints'/>
|
3025 |
<HAnimJoint USE='hanim_r_wrist' containerField='joints'/>
|
3026 |
<HAnimSegment USE='hanim_pelvis' containerField='segments'/>
|
3027 |
<HAnimSegment USE='hanim_skull' containerField='segments'/>
|
3028 |
<HAnimSegment USE='hanim_jaw' containerField='segments'/>
|
3029 |
<HAnimSegment USE='hanim_c1' containerField='segments'/>
|
3030 |
<HAnimSegment USE='hanim_c2' containerField='segments'/>
|
3031 |
<HAnimSegment USE='hanim_c3' containerField='segments'/>
|
3032 |
<HAnimSegment USE='hanim_c4' containerField='segments'/>
|
3033 |
<HAnimSegment USE='hanim_c5' containerField='segments'/>
|
3034 |
<HAnimSegment USE='hanim_c6' containerField='segments'/>
|
3035 |
<HAnimSegment USE='hanim_c7' containerField='segments'/>
|
3036 |
<HAnimSegment USE='hanim_t1' containerField='segments'/>
|
3037 |
<HAnimSegment USE='hanim_t2' containerField='segments'/>
|
3038 |
<HAnimSegment USE='hanim_t3' containerField='segments'/>
|
3039 |
<HAnimSegment USE='hanim_t4' containerField='segments'/>
|
3040 |
<HAnimSegment USE='hanim_t5' containerField='segments'/>
|
3041 |
<HAnimSegment USE='hanim_t6' containerField='segments'/>
|
3042 |
<HAnimSegment USE='hanim_t7' containerField='segments'/>
|
3043 |
<HAnimSegment USE='hanim_t8' containerField='segments'/>
|
3044 |
<HAnimSegment USE='hanim_t9' containerField='segments'/>
|
3045 |
<HAnimSegment USE='hanim_t10' containerField='segments'/>
|
3046 |
<HAnimSegment USE='hanim_t11' containerField='segments'/>
|
3047 |
<HAnimSegment USE='hanim_t12' containerField='segments'/>
|
3048 |
<HAnimSegment USE='hanim_l1' containerField='segments'/>
|
3049 |
<HAnimSegment USE='hanim_l2' containerField='segments'/>
|
3050 |
<HAnimSegment USE='hanim_l3' containerField='segments'/>
|
3051 |
<HAnimSegment USE='hanim_l4' containerField='segments'/>
|
3052 |
<HAnimSegment USE='hanim_l5' containerField='segments'/>
|
3053 |
<HAnimSegment USE='hanim_sacrum' containerField='segments'/>
|
3054 |
<HAnimSegment USE='hanim_l_calf' containerField='segments'/>
|
3055 |
<HAnimSegment USE='hanim_r_calf' containerField='segments'/>
|
3056 |
<HAnimSegment USE='hanim_l_clavicle' containerField='segments'/>
|
3057 |
<HAnimSegment USE='hanim_r_clavicle' containerField='segments'/>
|
3058 |
<HAnimSegment USE='hanim_l_eyeball' containerField='segments'/>
|
3059 |
<HAnimSegment USE='hanim_r_eyeball' containerField='segments'/>
|
3060 |
<HAnimSegment USE='hanim_l_eyebrow' containerField='segments'/>
|
3061 |
<HAnimSegment USE='hanim_r_eyebrow' containerField='segments'/>
|
3062 |
<HAnimSegment USE='hanim_l_eyelid' containerField='segments'/>
|
3063 |
<HAnimSegment USE='hanim_r_eyelid' containerField='segments'/>
|
3064 |
<HAnimSegment USE='hanim_l_forearm' containerField='segments'/>
|
3065 |
<HAnimSegment USE='hanim_r_forearm' containerField='segments'/>
|
3066 |
<HAnimSegment USE='hanim_l_forefoot' containerField='segments'/>
|
3067 |
<HAnimSegment USE='hanim_r_forefoot' containerField='segments'/>
|
3068 |
<HAnimSegment USE='hanim_l_hand' containerField='segments'/>
|
3069 |
<HAnimSegment USE='hanim_r_hand' containerField='segments'/>
|
3070 |
<HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/>
|
3071 |
<HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/>
|
3072 |
<HAnimSegment USE='hanim_l_index_distal' containerField='segments'/>
|
3073 |
<HAnimSegment USE='hanim_r_index_distal' containerField='segments'/>
|
3074 |
<HAnimSegment USE='hanim_l_index_metacarpal' containerField='segments'/>
|
3075 |
<HAnimSegment USE='hanim_r_index_metacarpal' containerField='segments'/>
|
3076 |
<HAnimSegment USE='hanim_l_index_middle' containerField='segments'/>
|
3077 |
<HAnimSegment USE='hanim_r_index_middle' containerField='segments'/>
|
3078 |
<HAnimSegment USE='hanim_l_index_proximal' containerField='segments'/>
|
3079 |
<HAnimSegment USE='hanim_r_index_proximal' containerField='segments'/>
|
3080 |
<HAnimSegment USE='hanim_l_middistal' containerField='segments'/>
|
3081 |
<HAnimSegment USE='hanim_r_middistal' containerField='segments'/>
|
3082 |
<HAnimSegment USE='hanim_l_middle_distal' containerField='segments'/>
|
3083 |
<HAnimSegment USE='hanim_r_middle_distal' containerField='segments'/>
|
3084 |
<HAnimSegment USE='hanim_l_middle_metacarpal' containerField='segments'/>
|
3085 |
<HAnimSegment USE='hanim_r_middle_metacarpal' containerField='segments'/>
|
3086 |
<HAnimSegment USE='hanim_l_middle_middle' containerField='segments'/>
|
3087 |
<HAnimSegment USE='hanim_r_middle_middle' containerField='segments'/>
|
3088 |
<HAnimSegment USE='hanim_l_middle_proximal' containerField='segments'/>
|
3089 |
<HAnimSegment USE='hanim_r_middle_proximal' containerField='segments'/>
|
3090 |
<HAnimSegment USE='hanim_l_midproximal' containerField='segments'/>
|
3091 |
<HAnimSegment USE='hanim_r_midproximal' containerField='segments'/>
|
3092 |
<HAnimSegment USE='hanim_l_pinky_distal' containerField='segments'/>
|
3093 |
<HAnimSegment USE='hanim_r_pinky_distal' containerField='segments'/>
|
3094 |
<HAnimSegment USE='hanim_l_pinky_metacarpal' containerField='segments'/>
|
3095 |
<HAnimSegment USE='hanim_r_pinky_metacarpal' containerField='segments'/>
|
3096 |
<HAnimSegment USE='hanim_l_pinky_middle' containerField='segments'/>
|
3097 |
<HAnimSegment USE='hanim_r_pinky_middle' containerField='segments'/>
|
3098 |
<HAnimSegment USE='hanim_l_pinky_proximal' containerField='segments'/>
|
3099 |
<HAnimSegment USE='hanim_r_pinky_proximal' containerField='segments'/>
|
3100 |
<HAnimSegment USE='hanim_l_ring_distal' containerField='segments'/>
|
3101 |
<HAnimSegment USE='hanim_r_ring_distal' containerField='segments'/>
|
3102 |
<HAnimSegment USE='hanim_l_ring_metacarpal' containerField='segments'/>
|
3103 |
<HAnimSegment USE='hanim_r_ring_metacarpal' containerField='segments'/>
|
3104 |
<HAnimSegment USE='hanim_l_ring_middle' containerField='segments'/>
|
3105 |
<HAnimSegment USE='hanim_r_ring_middle' containerField='segments'/>
|
3106 |
<HAnimSegment USE='hanim_l_ring_proximal' containerField='segments'/>
|
3107 |
<HAnimSegment USE='hanim_r_ring_proximal' containerField='segments'/>
|
3108 |
<HAnimSegment USE='hanim_l_scapula' containerField='segments'/>
|
3109 |
<HAnimSegment USE='hanim_r_scapula' containerField='segments'/>
|
3110 |
<HAnimSegment USE='hanim_l_thigh' containerField='segments'/>
|
3111 |
<HAnimSegment USE='hanim_r_thigh' containerField='segments'/>
|
3112 |
<HAnimSegment USE='hanim_l_thumb_distal' containerField='segments'/>
|
3113 |
<HAnimSegment USE='hanim_r_thumb_distal' containerField='segments'/>
|
3114 |
<HAnimSegment USE='hanim_l_thumb_metacarpal' containerField='segments'/>
|
3115 |
<HAnimSegment USE='hanim_r_thumb_metacarpal' containerField='segments'/>
|
3116 |
<HAnimSegment USE='hanim_l_thumb_proximal' containerField='segments'/>
|
3117 |
<HAnimSegment USE='hanim_r_thumb_proximal' containerField='segments'/>
|
3118 |
<HAnimSegment USE='hanim_l_upperarm' containerField='segments'/>
|
3119 |
<HAnimSegment USE='hanim_r_upperarm' containerField='segments'/>
|
3120 |
<HAnimSite USE='hanim_crotch_pt' containerField='sites'/>
|
3121 |
<HAnimSite USE='hanim_skull_tip' containerField='sites'/>
|
3122 |
<HAnimSite USE='hanim_sellion_pt' containerField='sites'/>
|
3123 |
<HAnimSite USE='hanim_supramenton_pt' containerField='sites'/>
|
3124 |
<HAnimSite USE='hanim_nuchale_pt' containerField='sites'/>
|
3125 |
<HAnimSite USE='hanim_suprasternale_pt' containerField='sites'/>
|
3126 |
<HAnimSite USE='hanim_cervicale_pt' containerField='sites'/>
|
3127 |
<HAnimSite USE='hanim_substernale_pt' containerField='sites'/>
|
3128 |
<HAnimSite USE='hanim_rib10_midspine_pt' containerField='sites'/>
|
3129 |
<HAnimSite USE='hanim_waist_preferred_post_pt' containerField='sites'/>
|
3130 |
<HAnimSite USE='hanim_navel_pt' containerField='sites'/>
|
3131 |
<HAnimSite USE='hanim_l_acromion_pt' containerField='sites'/>
|
3132 |
<HAnimSite USE='hanim_r_acromion_pt' containerField='sites'/>
|
3133 |
<HAnimSite USE='hanim_r_asis_pt' containerField='sites'/>
|
3134 |
<HAnimSite USE='hanim_l_asis_pt' containerField='sites'/>
|
3135 |
<HAnimSite USE='hanim_l_axilla_ant_pt' containerField='sites'/>
|
3136 |
<HAnimSite USE='hanim_r_axilla_ant_pt' containerField='sites'/>
|
3137 |
<HAnimSite USE='hanim_l_axilla_post_pt' containerField='sites'/>
|
3138 |
<HAnimSite USE='hanim_r_axilla_post_pt' containerField='sites'/>
|
3139 |
<HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/>
|
3140 |
<HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/>
|
3141 |
<HAnimSite USE='hanim_l_clavicale_pt' containerField='sites'/>
|
3142 |
<HAnimSite USE='hanim_r_clavicale_pt' containerField='sites'/>
|
3143 |
<HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/>
|
3144 |
<HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/>
|
3145 |
<HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/>
|
3146 |
<HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/>
|
3147 |
<HAnimSite USE='hanim_l_eyeball_site_view' containerField='viewpoints'/>
|
3148 |
<HAnimSite USE='hanim_r_eyeball_site_view' containerField='viewpoints'/>
|
3149 |
<HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/>
|
3150 |
<HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/>
|
3151 |
<HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/>
|
3152 |
<HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/>
|
3153 |
<HAnimSite USE='hanim_l_forefoot_tip' containerField='sites'/>
|
3154 |
<HAnimSite USE='hanim_r_forefoot_tip' containerField='sites'/>
|
3155 |
<HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/>
|
3156 |
<HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/>
|
3157 |
<HAnimSite USE='hanim_l_hand_front_view' containerField='viewpoints'/>
|
3158 |
<HAnimSite USE='hanim_r_hand_front_view' containerField='viewpoints'/>
|
3159 |
<HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/>
|
3160 |
<HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/>
|
3161 |
<HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/>
|
3162 |
<HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/>
|
3163 |
<HAnimSite USE='hanim_r_iliocristale_pt' containerField='sites'/>
|
3164 |
<HAnimSite USE='hanim_l_iliocristale_pt' containerField='sites'/>
|
3165 |
<HAnimSite USE='hanim_l_index_distal_tip' containerField='sites'/>
|
3166 |
<HAnimSite USE='hanim_r_index_distal_tip' containerField='sites'/>
|
3167 |
<HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/>
|
3168 |
<HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/>
|
3169 |
<HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/>
|
3170 |
<HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/>
|
3171 |
<HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/>
|
3172 |
<HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/>
|
3173 |
<HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/>
|
3174 |
<HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/>
|
3175 |
<HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/>
|
3176 |
<HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/>
|
3177 |
<HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/>
|
3178 |
<HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/>
|
3179 |
<HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/>
|
3180 |
<HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/>
|
3181 |
<HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/>
|
3182 |
<HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/>
|
3183 |
<HAnimSite USE='hanim_l_middle_distal_tip' containerField='sites'/>
|
3184 |
<HAnimSite USE='hanim_r_middle_distal_tip' containerField='sites'/>
|
3185 |
<HAnimSite USE='hanim_r_neck_base_pt' containerField='sites'/>
|
3186 |
<HAnimSite USE='hanim_l_neck_base_pt' containerField='sites'/>
|
3187 |
<HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/>
|
3188 |
<HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/>
|
3189 |
<HAnimSite USE='hanim_l_pinky_distal_tip' containerField='sites'/>
|
3190 |
<HAnimSite USE='hanim_r_pinky_distal_tip' containerField='sites'/>
|
3191 |
<HAnimSite USE='hanim_r_psis_pt' containerField='sites'/>
|
3192 |
<HAnimSite USE='hanim_l_psis_pt' containerField='sites'/>
|
3193 |
<HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/>
|
3194 |
<HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/>
|
3195 |
<HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/>
|
3196 |
<HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/>
|
3197 |
<HAnimSite USE='hanim_r_rib10_pt' containerField='sites'/>
|
3198 |
<HAnimSite USE='hanim_l_rib10_pt' containerField='sites'/>
|
3199 |
<HAnimSite USE='hanim_l_ring_distal_tip' containerField='sites'/>
|
3200 |
<HAnimSite USE='hanim_r_ring_distal_tip' containerField='sites'/>
|
3201 |
<HAnimSite USE='hanim_temporomandibular_l_site_pt' containerField='sites'/>
|
3202 |
<HAnimSite USE='hanim_temporomandibular_r_site_pt' containerField='sites'/>
|
3203 |
<HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/>
|
3204 |
<HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/>
|
3205 |
<HAnimSite USE='hanim_r_thelion_pt' containerField='sites'/>
|
3206 |
<HAnimSite USE='hanim_l_thelion_pt' containerField='sites'/>
|
3207 |
<HAnimSite USE='hanim_l_thumb_distal_tip' containerField='sites'/>
|
3208 |
<HAnimSite USE='hanim_r_thumb_distal_tip' containerField='sites'/>
|
3209 |
<HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/>
|
3210 |
<HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/>
|
3211 |
<HAnimSite USE='hanim_r_trochanterion_pt' containerField='sites'/>
|
3212 |
<HAnimSite USE='hanim_l_trochanterion_pt' containerField='sites'/>
|
3213 |
<HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/>
|
3214 |
<HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/>
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
</HAnimHumanoid> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Event Graph ROUTE Table with 0 ROUTE connections total, showing X3D event-model relationships for this scene.
Each row shows an event cascade that may occur during a single timestamp interval between frame renderings, as part of the X3D execution model.
| line 59
TouchSensor |
description='HAnimJoint HumanoidRoot, HAnimSegment sacrum' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 86
TouchSensor |
description='HAnimJoint sacroiliac, HAnimSegment pelvis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 169
TouchSensor |
description='HAnimSite r_iliocristale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 181
TouchSensor |
description='HAnimSite r_trochanterion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 186
TouchSensor |
description='HAnimSite l_iliocristale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 191
TouchSensor |
description='HAnimSite l_trochanterion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 196
TouchSensor |
description='HAnimSite r_asis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 201
TouchSensor |
description='HAnimSite l_asis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 206
TouchSensor |
description='HAnimSite r_psis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 211
TouchSensor |
description='HAnimSite l_psis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 216
TouchSensor |
description='HAnimSite crotch' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 223
TouchSensor |
description='HAnimJoint l_hip, HAnimSegment l_thigh' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 257
TouchSensor |
description='HAnimSite l_knee_crease' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 262
TouchSensor |
description='HAnimSite l_femoral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 267
TouchSensor |
description='HAnimSite l_femoral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 274
TouchSensor |
description='HAnimJoint l_knee, HAnimSegment l_calf' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 289
TouchSensor |
description='HAnimJoint l_ankle, HAnimSegment l_hindfoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 330
TouchSensor |
description='HAnimSite l_lateral_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 335
TouchSensor |
description='HAnimSite l_medial_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 340
TouchSensor |
description='HAnimSite l_sphyrion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 345
TouchSensor |
description='HAnimSite l_calcaneous_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 352
TouchSensor |
description='HAnimJoint l_subtalar, HAnimSegment l_midproximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 367
TouchSensor |
description='HAnimJoint l_midtarsal, HAnimSegment l_middistal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 387
TouchSensor |
description='HAnimSite l_metatarsal_pha1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 394
TouchSensor |
description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 421
TouchSensor |
description='HAnimSite l_forefoot_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 426
TouchSensor |
description='HAnimSite l_metatarsal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 431
TouchSensor |
description='HAnimSite l_digit2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 444
TouchSensor |
description='HAnimJoint r_hip, HAnimSegment r_thigh' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 478
TouchSensor |
description='HAnimSite r_knee_crease' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 483
TouchSensor |
description='HAnimSite r_femoral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 488
TouchSensor |
description='HAnimSite r_femoral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 495
TouchSensor |
description='HAnimJoint r_knee, HAnimSegment r_calf' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 510
TouchSensor |
description='HAnimJoint r_ankle, HAnimSegment r_hindfoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 551
TouchSensor |
description='HAnimSite r_lateral_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 556
TouchSensor |
description='HAnimSite r_medial_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 561
TouchSensor |
description='HAnimSite r_sphyrion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 566
TouchSensor |
description='HAnimSite r_calcaneous_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 573
TouchSensor |
description='HAnimJoint r_subtalar, HAnimSegment r_midproximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 588
TouchSensor |
description='HAnimJoint r_midtarsal, HAnimSegment r_middistal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 608
TouchSensor |
description='HAnimSite r_metatarsal_pha1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 615
TouchSensor |
description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 642
TouchSensor |
description='HAnimSite r_forefoot_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 647
TouchSensor |
description='HAnimSite r_metatarsal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 652
TouchSensor |
description='HAnimSite r_digit2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 666
TouchSensor |
description='HAnimJoint vl5, HAnimSegment l5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 693
TouchSensor |
description='HAnimSite waist_preferred_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 698
TouchSensor |
description='HAnimSite navel' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 705
TouchSensor |
description='HAnimJoint vl4, HAnimSegment l4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 720
TouchSensor |
description='HAnimJoint vl3, HAnimSegment l3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 735
TouchSensor |
description='HAnimJoint vl2, HAnimSegment l2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 769
TouchSensor |
description='HAnimSite r_rib10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 774
TouchSensor |
description='HAnimSite l_rib10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 779
TouchSensor |
description='HAnimSite rib10_midspine' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 786
TouchSensor |
description='HAnimJoint vl1, HAnimSegment l1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 801
TouchSensor |
description='HAnimJoint vt12, HAnimSegment t12' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 816
TouchSensor |
description='HAnimJoint vt11, HAnimSegment t11' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 831
TouchSensor |
description='HAnimJoint vt10, HAnimSegment t10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 851
TouchSensor |
description='HAnimSite substernale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 858
TouchSensor |
description='HAnimJoint vt9, HAnimSegment t9' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 885
TouchSensor |
description='HAnimSite r_thelion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 890
TouchSensor |
description='HAnimSite l_thelion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 897
TouchSensor |
description='HAnimJoint vt8, HAnimSegment t8' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 912
TouchSensor |
description='HAnimJoint vt7, HAnimSegment t7' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 927
TouchSensor |
description='HAnimJoint vt6, HAnimSegment t6' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 942
TouchSensor |
description='HAnimJoint vt5, HAnimSegment t5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 957
TouchSensor |
description='HAnimJoint vt4, HAnimSegment t4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 972
TouchSensor |
description='HAnimJoint vt3, HAnimSegment t3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 987
TouchSensor |
description='HAnimJoint vt2, HAnimSegment t2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1002
TouchSensor |
description='HAnimJoint vt1, HAnimSegment t1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1043
TouchSensor |
description='HAnimSite suprasternale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1048
TouchSensor |
description='HAnimSite cervicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1055
TouchSensor |
description='HAnimJoint vc7, HAnimSegment c7' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1082
TouchSensor |
description='HAnimSite r_neck_base' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1087
TouchSensor |
description='HAnimSite l_neck_base' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1094
TouchSensor |
description='HAnimJoint vc6, HAnimSegment c6' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1109
TouchSensor |
description='HAnimJoint vc5, HAnimSegment c5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1124
TouchSensor |
description='HAnimJoint vc4, HAnimSegment c4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1139
TouchSensor |
description='HAnimJoint vc3, HAnimSegment c3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1154
TouchSensor |
description='HAnimJoint vc2, HAnimSegment c2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1169
TouchSensor |
description='HAnimJoint vc1, HAnimSegment c1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1184
TouchSensor |
description='HAnimJoint skullbase, HAnimSegment skull' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1310
TouchSensor |
description='HAnimSite skull_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1315
TouchSensor |
description='HAnimSite sellion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1320
TouchSensor |
description='HAnimSite r_infraorbitale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1325
TouchSensor |
description='HAnimSite l_infraorbitale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1330
TouchSensor |
description='HAnimSite supramenton' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1335
TouchSensor |
description='HAnimSite r_tragion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1340
TouchSensor |
description='HAnimSite r_gonion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1345
TouchSensor |
description='HAnimSite l_tragion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1350
TouchSensor |
description='HAnimSite l_gonion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1355
TouchSensor |
description='HAnimSite nuchale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1362
TouchSensor |
description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1375
TouchSensor |
description='HAnimSite l_eyeball_site_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1398
TouchSensor |
description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1407
TouchSensor |
description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1416
TouchSensor |
description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1429
TouchSensor |
description='HAnimSite r_eyeball_site_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1445
TouchSensor |
description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1454
TouchSensor |
description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1464
TouchSensor |
description='HAnimJoint temporomandibular, HAnimSegment jaw' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1484
TouchSensor |
description='HAnimSite temporomandibular_l_site' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1489
TouchSensor |
description='HAnimSite temporomandibular_r_site' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1505
TouchSensor |
description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1546
TouchSensor |
description='HAnimSite l_clavicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1551
TouchSensor |
description='HAnimSite l_acromion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1556
TouchSensor |
description='HAnimSite l_axilla_ant' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1561
TouchSensor |
description='HAnimSite l_axilla_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1568
TouchSensor |
description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1583
TouchSensor |
description='HAnimJoint l_shoulder, HAnimSegment l_upperarm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1603
TouchSensor |
description='HAnimSite l_humeral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1610
TouchSensor |
description='HAnimJoint l_elbow, HAnimSegment l_forearm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1651
TouchSensor |
description='HAnimSite l_radial_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1656
TouchSensor |
description='HAnimSite l_olecranon' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1661
TouchSensor |
description='HAnimSite l_humeral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1666
TouchSensor |
description='HAnimSite l_radiale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1673
TouchSensor |
description='HAnimJoint l_wrist, HAnimSegment l_hand' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1742
TouchSensor |
description='HAnimSite l_metacarpal_pha2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1747
TouchSensor |
description='HAnimSite l_ulnar_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1752
TouchSensor |
description='HAnimSite l_metacarpal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1757
TouchSensor |
description='HAnimSite l_hand_front_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1772
TouchSensor |
description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1787
TouchSensor |
description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1802
TouchSensor |
description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1815
TouchSensor |
description='HAnimSite l_thumb_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1825
TouchSensor |
description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1840
TouchSensor |
description='HAnimJoint l_index1, HAnimSegment l_index_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1855
TouchSensor |
description='HAnimJoint l_index2, HAnimSegment l_index_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1870
TouchSensor |
description='HAnimJoint l_index3, HAnimSegment l_index_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1890
TouchSensor |
description='HAnimSite l_index_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1895
TouchSensor |
description='HAnimSite l_dactylion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1906
TouchSensor |
description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1921
TouchSensor |
description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1936
TouchSensor |
description='HAnimJoint l_middle2, HAnimSegment l_middle_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1951
TouchSensor |
description='HAnimJoint l_middle3, HAnimSegment l_middle_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1964
TouchSensor |
description='HAnimSite l_middle_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1975
TouchSensor |
description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1990
TouchSensor |
description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2005
TouchSensor |
description='HAnimJoint l_ring2, HAnimSegment l_ring_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2020
TouchSensor |
description='HAnimJoint l_ring3, HAnimSegment l_ring_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2033
TouchSensor |
description='HAnimSite l_ring_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2044
TouchSensor |
description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2059
TouchSensor |
description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2074
TouchSensor |
description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2089
TouchSensor |
description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2102
TouchSensor |
description='HAnimSite l_pinky_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2118
TouchSensor |
description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2159
TouchSensor |
description='HAnimSite r_clavicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2164
TouchSensor |
description='HAnimSite r_acromion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2169
TouchSensor |
description='HAnimSite r_axilla_ant' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2174
TouchSensor |
description='HAnimSite r_axilla_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2181
TouchSensor |
description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2196
TouchSensor |
description='HAnimJoint r_shoulder, HAnimSegment r_upperarm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2216
TouchSensor |
description='HAnimSite r_humeral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2223
TouchSensor |
description='HAnimJoint r_elbow, HAnimSegment r_forearm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2264
TouchSensor |
description='HAnimSite r_radial_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2269
TouchSensor |
description='HAnimSite r_olecranon' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2274
TouchSensor |
description='HAnimSite r_humeral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2279
TouchSensor |
description='HAnimSite r_radiale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2286
TouchSensor |
description='HAnimJoint r_wrist, HAnimSegment r_hand' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2355
TouchSensor |
description='HAnimSite r_metacarpal_pha2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2360
TouchSensor |
description='HAnimSite r_ulnar_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2365
TouchSensor |
description='HAnimSite r_metacarpal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2370
TouchSensor |
description='HAnimSite r_hand_front_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2385
TouchSensor |
description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2400
TouchSensor |
description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2415
TouchSensor |
description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2428
TouchSensor |
description='HAnimSite r_thumb_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2438
TouchSensor |
description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2453
TouchSensor |
description='HAnimJoint r_index1, HAnimSegment r_index_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2468
TouchSensor |
description='HAnimJoint r_index2, HAnimSegment r_index_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2483
TouchSensor |
description='HAnimJoint r_index3, HAnimSegment r_index_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2503
TouchSensor |
description='HAnimSite r_index_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2508
TouchSensor |
description='HAnimSite r_dactylion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2519
TouchSensor |
description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2534
TouchSensor |
description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2549
TouchSensor |
description='HAnimJoint r_middle2, HAnimSegment r_middle_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2564
TouchSensor |
description='HAnimJoint r_middle3, HAnimSegment r_middle_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2577
TouchSensor |
description='HAnimSite r_middle_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2588
TouchSensor |
description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2603
TouchSensor |
description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2618
TouchSensor |
description='HAnimJoint r_ring2, HAnimSegment r_ring_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2633
TouchSensor |
description='HAnimJoint r_ring3, HAnimSegment r_ring_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2646
TouchSensor |
description='HAnimSite r_ring_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2657
TouchSensor |
description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2672
TouchSensor |
description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2687
TouchSensor |
description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2702
TouchSensor |
description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2715
TouchSensor |
description='HAnimSite r_pinky_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2750
TouchSensor |
description='HAnimSite l_inclined_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2763
TouchSensor |
description='HAnimSite r_inclined_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2776
TouchSensor |
description='HAnimSite front_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2789
TouchSensor |
description='HAnimSite back_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2802
TouchSensor |
description='HAnimSite l_side_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2815
TouchSensor |
description='HAnimSite Top_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2829
TouchSensor |
description='HAnimSite front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2842
TouchSensor |
description='HAnimSite side_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2855
TouchSensor |
description='HAnimSite head_front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2868
TouchSensor |
description='HAnimSite chest_front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2881
TouchSensor |
description='HAnimSite pelvis_front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2894
TouchSensor |
description='HAnimSite knees_front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2907
TouchSensor |
description='HAnimSite feet_front_close_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2921
TouchSensor |
description='HAnimSite eye_level_view' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1379
Anchor |
description='HAnimSite hanim_l_eyeball_site_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 1433
Anchor |
description='HAnimSite hanim_r_eyeball_site_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 1761
Anchor |
description='HAnimSite hanim_l_hand_front_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2374
Anchor |
description='HAnimSite hanim_r_hand_front_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2754
Anchor |
description='HAnimSite hanim_l_inclined_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2767
Anchor |
description='HAnimSite hanim_r_inclined_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2780
Anchor |
description='HAnimSite hanim_front_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2793
Anchor |
description='HAnimSite hanim_back_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2806
Anchor |
description='HAnimSite hanim_l_side_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2819
Anchor |
description='HAnimSite hanim_Top_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2833
Anchor |
description='HAnimSite hanim_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2846
Anchor |
description='HAnimSite hanim_side_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2859
Anchor |
description='HAnimSite hanim_head_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2872
Anchor |
description='HAnimSite hanim_chest_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2885
Anchor |
description='HAnimSite hanim_pelvis_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2898
Anchor |
description='HAnimSite hanim_knees_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2911
Anchor |
description='HAnimSite hanim_feet_front_close_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
| line 2925
Anchor |
description='HAnimSite hanim_eye_level_view Viewpoint' No direct ROUTE connection found for events to/from this node. |
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}