public class Hand
extends java.lang.Object
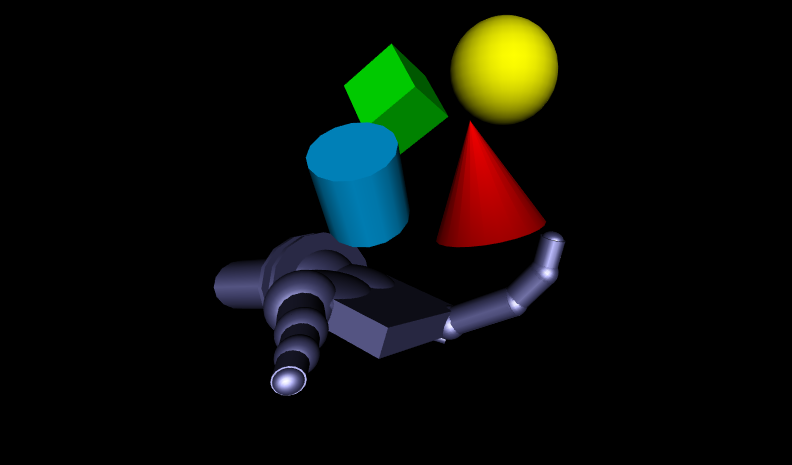
Robotic hand juggling primitives: this scene illustrates the use of the primitive shapes and a lot of nested Transform nodes to created articulated structures.
Related links: Hand.java source, Hand catalog page, X3D Resources, X3D Scene Authoring Hints, and X3D Tooltips.
This program uses the
X3D Java Scene Access Interface Library (X3DJSAIL).
It has been produced using the
X3dToJava.xslt
stylesheet to create Java source code from an .x3d model.
| Constructor and Description |
|---|
Hand()
Default constructor to create this object.
|
| Modifier and Type | Method and Description |
|---|---|
org.web3d.x3d.jsail.Core.X3DObject |
getX3dModel()
Provide a
shallow copy
of the X3D model.
|
void |
initialize()
Create and initialize the X3D model for this object.
|
static void |
main(java.lang.String[] args)
Default main() method provided for test purposes, uses CommandLine to set global ConfigurationProperties for this object.
|
public final void initialize()
public org.web3d.x3d.jsail.Core.X3DObject getX3dModel()
public static void main(java.lang.String[] args)
args - array of input parameters, provided as argumentsCopyright ©2005-2019 Web3D Consortium under an open-source license, free for any use. Feedback is welcome.
{kind=link}