
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 3.3//EN" "https://www.web3d.org/specifications/x3d-3.3.dtd">
|
| 3 | <X3D profile='Immersive' version='3.3' xmlns:xsd='http://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-3.3.xsd'> |
| 4 | <head> |
| 5 | <meta name='title' content=' Robots.x3d '/> |
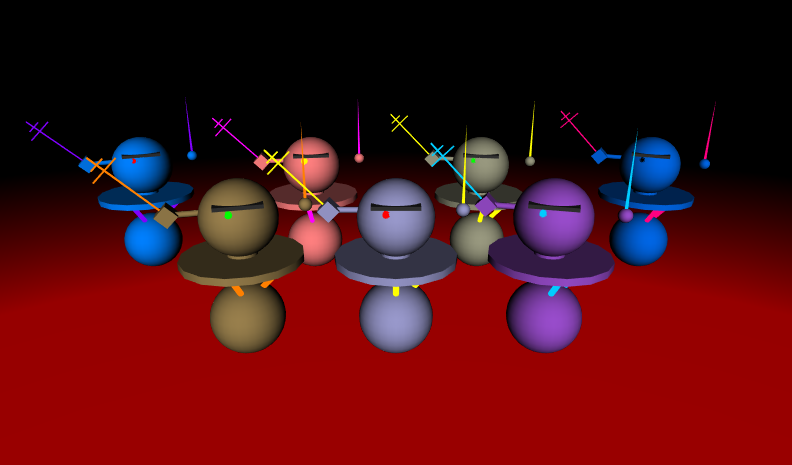
| 6 | <meta name='description' content='Robot generator prototype to create multiple new nodes. For this example, we create a new "Robot" node type that has three fields, one each for setting the l color (robot body), its eye color, and its rod color (gadgets on the body). Those three fields are used within the body of the Prototype where the robot form is constructed. Each time a Prototype field (l, eye, and rod colors) is used within the Prototype body, use the "IS" syntax to say: "this field within the Prototype body IS equal to the argument in the Prototype interface."'/> |
| 7 | <meta name='creator' content='David R. Nadeau'/> |
| 8 | <meta name='translator' content='Don Brutzman'/> |
| 9 | <meta name='created' content='1 July 1998'/> |
| 10 | <meta name='translated' content='2 February 2014'/> |
| 11 | <meta name='modified' content='20 October 2019'/> |
| 12 | <meta name='reference' content=' RoboBill.x3d '/> |
| 13 | <meta name='reference' content='originals/robot.wrl'/> |
| 14 | <meta name='reference' content='http://www.siggraph.org/s98'/> |
| 15 | <meta name='reference' content=' http://www.siggraph.org/s98/conference/courses/18.html '/> |
| 16 | <meta name='reference' content=' http://www.sdsc.edu/~moreland/courses/Siggraph98/vrml97/slides/mt0479.htm '/> |
| 17 | <meta name='reference' content=' http://www.sdsc.edu/~moreland/courses/Siggraph98/vrml97/vrml97.htm '/> |
| 18 | <meta name='reference' content=' https://www.web3d.org/x3d/content/examples/X3dResources.html '/> |
| 19 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/Vrml2Sourcebook/Siggraph98Course/Robots.x3d '/> |
| 20 | <meta name='generator' content=' Vrml97ToX3dNist, http://ovrt.nist.gov/v2_x3d.html '/> |
| 21 | <meta name='generator' content='X3D-Edit, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 22 | <meta name='license' content='../license.html'/> |
| 23 | </head> |
| 24 | <Scene> |
| 25 | <WorldInfo info='"Copyright (c) 1998, David R. Nadeau"' title='Robot Generator'/> |
| 26 | <Viewpoint description='Entry view' orientation='1.0 0.0 0.0 -0.34' position='0.0 3.6 6.8'/> |
| 27 | <NavigationInfo/> |
| 28 | <Background skyAngle='1.77 1.87 1.97' skyColor='0.0 0.0 0.0 0.0 0.0 0.0 0.4 0.0 0.0 0.6 0.0 0.0'/> |
| 29 | <ProtoDeclare name='Robot'> |
| 30 | <ProtoInterface> |
| 31 | <field name='rodColor' type='SFColor' value='1.0 1.0 0.0' accessType='initializeOnly'/> |
| 32 | <field name='eyeColor' type='SFColor' value='0.6 0.0 0.0' accessType='initializeOnly'/> |
| 33 | <field name='lColor' type='SFColor' value='0.6 0.6 0.8' accessType='initializeOnly'/> |
| 34 | </ProtoInterface> |
| 35 | <ProtoBody> |
| 36 | <Group> |
| 37 | <Shape> |
| 38 | |
| 39 | <Material> |
| 40 | <IS> |
| 41 | <connect nodeField='diffuseColor' protoField='lColor'/> |
| 42 | </IS> |
| 43 | </Material> |
| 44 | </Appearance> |
| 45 | <Sphere radius='0.5'/> |
| 46 | </Shape> |
| 47 | |
| 48 | <Shape> |
| 49 | |
| 50 | <Material diffuseColor='0.0 0.0 0.0'> |
| 51 | <IS> |
| 52 | <connect nodeField='emissiveColor' protoField='rodColor'/> |
| 53 | </IS> |
| 54 | </Material> |
| 55 | </Appearance> |
| 56 | <Cylinder height='0.65' radius='0.04'/> |
| 57 | </Shape> |
| 58 | </Transform> |
| 59 | <Transform rotation='0.0 1.0 0.0 1.57'> |
| 60 | <Transform USE='Rod'/> |
| 61 | </Transform> |
| 62 | <Transform rotation='0.0 1.0 0.0 3.14'> |
| 63 | <Transform USE='Rod'/> |
| 64 | </Transform> |
| 65 | <Transform rotation='0.0 1.0 0.0 -1.57'> |
| 66 | <Transform USE='Rod'/> |
| 67 | </Transform> |
| 68 | <Transform translation='0.0 0.85 0.0'> |
| 69 | <Shape> |
| 70 | <Appearance USE='RobotColor'/> |
| 71 | <Cylinder height='0.1' radius='0.8'/> |
| 72 | </Shape> |
| 73 | </Transform> |
| 74 | <Transform translation='0.0 0.95 0.0'> |
| 75 | <Shape> |
| 76 | <Appearance USE='RobotColor'/> |
| 77 | <Cylinder height='0.1' radius='0.2'/> |
| 78 | </Shape> |
| 79 | </Transform> |
| 80 | <Billboard> |
| 81 | <Transform translation='0.0 1.4 0.0'> |
| 82 | <Shape> |
| 83 | <Appearance USE='RobotColor'/> |
| 84 | <Sphere radius='0.5'/> |
| 85 | </Shape> |
| 86 | <Transform translation='0.0 0.25 0.35'> |
| 87 | <Shape> |
| 88 | <Appearance> |
| 89 | <Material diffuseColor='0.2 0.2 0.2'/> |
| 90 | </Appearance> |
| 91 | <Box size='0.6 0.05 0.2'/> |
| 92 | </Shape> |
| 93 | </Transform> |
| 94 | <Transform translation='0.1 0.15 0.38'> |
| 95 | |
| 96 | <Appearance> |
| 97 | <Material diffuseColor='0.0 0.0 0.0'> |
| 98 | <IS> |
| 99 | <connect nodeField='emissiveColor' protoField='eyeColor'/> |
| 100 | </IS> |
| 101 | </Material> |
| 102 | </Appearance> |
| 103 | <Sphere radius='0.09'/> |
| 104 | </Shape> |
| 105 | </Transform> |
| 106 | <Transform translation='-0.1 0.15 0.38'> |
| 107 | <Shape USE='Eye'/> |
| 108 | </Transform> |
| 109 | <Transform translation='0.85 0.1 0.0'> |
| 110 | <Transform rotation='0.0 0.0 1.0 1.57' translation='-0.2 0.0 0.0'> |
| 111 |
<!-- Shape
AntenaeBar is a DEF node that has 1 USE node: USE_1 -->
<Shape DEF='AntenaeBar'> |
| 112 | <Appearance USE='RobotColor'/> |
| 113 | <Cylinder height='0.4' radius='0.04'/> |
| 114 | </Shape> |
| 115 | </Transform> |
| 116 | <Shape> |
| 117 | <Appearance USE='RobotColor'/> |
| 118 | <Sphere radius='0.09'/> |
| 119 | </Shape> |
| 120 | <Transform translation='0.0 0.58 0.0'> |
| 121 | <Shape> |
| 122 | <Appearance USE='RobotGlow'/> |
| 123 | <Cone bottomRadius='0.02' height='1.0'/> |
| 124 | </Shape> |
| 125 | </Transform> |
| 126 | </Transform> |
| 127 | <Transform translation='-0.85 0.1 0.0'> |
| 128 | <Transform rotation='0.0 0.0 1.0 -1.57' translation='0.2 0.0 0.0'> |
| 129 | <Shape USE='AntenaeBar'/> |
| 130 | </Transform> |
| 131 | <Transform rotation='0.0 0.0 1.0 0.785'> |
| 132 | <Shape> |
| 133 | <Appearance USE='RobotColor'/> |
| 134 | <Box size='0.2 0.2 0.2'/> |
| 135 | </Shape> |
| 136 | <Transform translation='0.0 0.58 0.0'> |
| 137 | <Shape> |
| 138 | <Appearance USE='RobotGlow'/> |
| 139 | <Box size='0.02 1.0 0.02'/> |
| 140 | </Shape> |
| 141 | </Transform> |
| 142 | <Transform translation='0.0 0.95 0.0'> |
| 143 | <Shape> |
| 144 | <Appearance USE='RobotGlow'/> |
| 145 | <Box size='0.2 0.02 0.02'/> |
| 146 | </Shape> |
| 147 | </Transform> |
| 148 | <Transform translation='0.0 0.85 0.0'> |
| 149 | <Shape> |
| 150 | <Appearance USE='RobotGlow'/> |
| 151 | <Box size='0.4 0.02 0.02'/> |
| 152 | </Shape> |
| 153 | </Transform> |
| 154 | </Transform> |
| 155 | </Transform> |
| 156 | </Transform> |
| 157 | </Billboard> |
| 158 | </Group> |
| 159 | </ProtoBody> |
| 160 | </ProtoDeclare> |
| 161 | <ProtoInstance name='Robot'> |
| 162 | <fieldValue name='eyeColor' value='1.0 0.0 0.0'/> |
| 163 | <fieldValue name='rodColor' value='1.0 1.0 0.0'/> |
| 164 | <fieldValue name='lColor' value='0.6 0.6 0.8'/> |
| 165 | </ProtoInstance> |
| 166 | <Transform translation='-2.0 0.0 0.0'> |
| 167 | <ProtoInstance name='Robot'> |
| 168 | <fieldValue name='eyeColor' value='0.0 1.0 0.0'/> |
| 169 | <fieldValue name='rodColor' value='1.0 0.5 0.0'/> |
| 170 | <fieldValue name='lColor' value='0.6 0.5 0.3'/> |
| 171 | </ProtoInstance> |
| 172 | </Transform> |
| 173 | <Transform translation='2.0 0.0 0.0'> |
| 174 | <ProtoInstance name='Robot'> |
| 175 | <fieldValue name='eyeColor' value='0.0 0.8 1.0'/> |
| 176 | <fieldValue name='rodColor' value='0.0 0.8 1.0'/> |
| 177 | <fieldValue name='lColor' value='0.6 0.3 0.8'/> |
| 178 | </ProtoInstance> |
| 179 | </Transform> |
| 180 | <Transform translation='4.5 0.0 -3.0'> |
| 181 | <ProtoInstance name='Robot'> |
| 182 | <fieldValue name='eyeColor' value='0.0 0.0 0.0'/> |
| 183 | <fieldValue name='rodColor' value='1.0 0.0 0.5'/> |
| 184 | <fieldValue name='lColor' value='0.0 0.4 0.9'/> |
| 185 | </ProtoInstance> |
| 186 | </Transform> |
| 187 | <Transform translation='1.5 0.0 -3.0'> |
| 188 | <ProtoInstance name='Robot'> |
| 189 | <fieldValue name='eyeColor' value='0.0 1.0 0.0'/> |
| 190 | <fieldValue name='rodColor' value='1.0 1.0 0.0'/> |
| 191 | <fieldValue name='lColor' value='0.6 0.6 0.5'/> |
| 192 | </ProtoInstance> |
| 193 | </Transform> |
| 194 | <Transform translation='-1.5 0.0 -3.0'> |
| 195 | <ProtoInstance name='Robot'> |
| 196 | <fieldValue name='eyeColor' value='1.0 1.0 0.0'/> |
| 197 | <fieldValue name='rodColor' value='1.0 0.0 1.0'/> |
| 198 | <fieldValue name='lColor' value='1.0 0.5 0.5'/> |
| 199 | </ProtoInstance> |
| 200 | </Transform> |
| 201 | <Transform translation='-4.5 0.0 -3.0'> |
| 202 | <ProtoInstance name='Robot'> |
| 203 | <fieldValue name='eyeColor' value='1.0 0.0 0.0'/> |
| 204 | <fieldValue name='rodColor' value='0.5 0.0 1.0'/> |
| 205 | <fieldValue name='lColor' value='0.0 0.5 1.0'/> |
| 206 | </ProtoInstance> |
| 207 | </Transform> |
| 208 | </Scene> |
| 209 | </X3D> |
Event Graph ROUTE Table with 0 ROUTE connections total, showing X3D event-model relationships for this scene.
Each row shows an event cascade that may occur during a single timestamp interval between frame renderings, as part of the X3D execution model.
| line 161
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 167
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 174
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 181
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 188
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 195
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
| line 202
ProtoInstance Robot |
No direct ROUTE connection found for events to/from this node. This ProtoInstance contains SFNode/MFNode fieldValue declarations with direct access to other nodes, and thus has potential to produce run-time animation. |
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
<ProtoInstance name='ProtoName'>
<field name='fieldName'/> </ProtoInstance>
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
{kind=link}