
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 3.3//EN" "https://www.web3d.org/specifications/x3d-3.3.dtd">
|
| 3 | <X3D profile='Immersive' version='3.3' xmlns:xsd='http://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-3.3.xsd'> |
| 4 | <head> |
| 5 | <component level='1' name='H-Anim'/> |
| 6 | <meta name='title' content=' HAnimSpecificationLOA3Animation.x3d '/> |
| 7 | <meta name='description' content='HAnim Specification reference example providing full coverage and visibility of all specified HAnim constructs, plus motion animations. Geometry visualizations are derived from HAnimSpecificationLOA3Invisible.x3d visualization report. Resusable exemplar animations also added via heads-up display (HUD) interface to confirm proper parent-child relationships.'/> |
| 8 | <meta name='reference' content='https://www.web3d.org/files/specifications/19774/V1.0/HAnim/BodyDimensionsAndLOAs.html#LOA3ExampleSourceWithDiamonds'/> |
| 9 | <meta name='created' content='24 April 2013'/> |
| 10 | <meta name='modified' content='16 March 2026'/> |
| 11 | <meta name=' error ' content=' Legacy model, not valid as X3D4 HAnim version 2.0 since HAnim version 1.0 has significant differences and is no longer directly supported '/> |
| 12 |
<meta name='Image' content='HAnimSpecificationLOA3MotionH3DViewer.png' /> />
|
| 13 |
<meta name='Image' content='HAnimSpecificationLOA3MotionInstantReality.png' /> />
|
| 14 |
<meta name='Image' content='HAnimSpecificationLOA3MotionOctagaVS.png' /> />
|
| 15 |
<meta name='Image' content='HAnimSpecificationLOA3MotionView3dscene.png' /> />
|
| 16 | <meta name='reference' content=' HAnimSpecificationLOA3Illustrated.x3d '/> |
| 17 | <meta name='reference' content=' HAnimSpecificationLOA3Invisible.x3d '/> |
| 18 | <meta name='reference' content=' HAnimSpecificationExampleChangeLog.txt '/> |
| 19 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA1.png' /> />
|
| 20 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA2.png'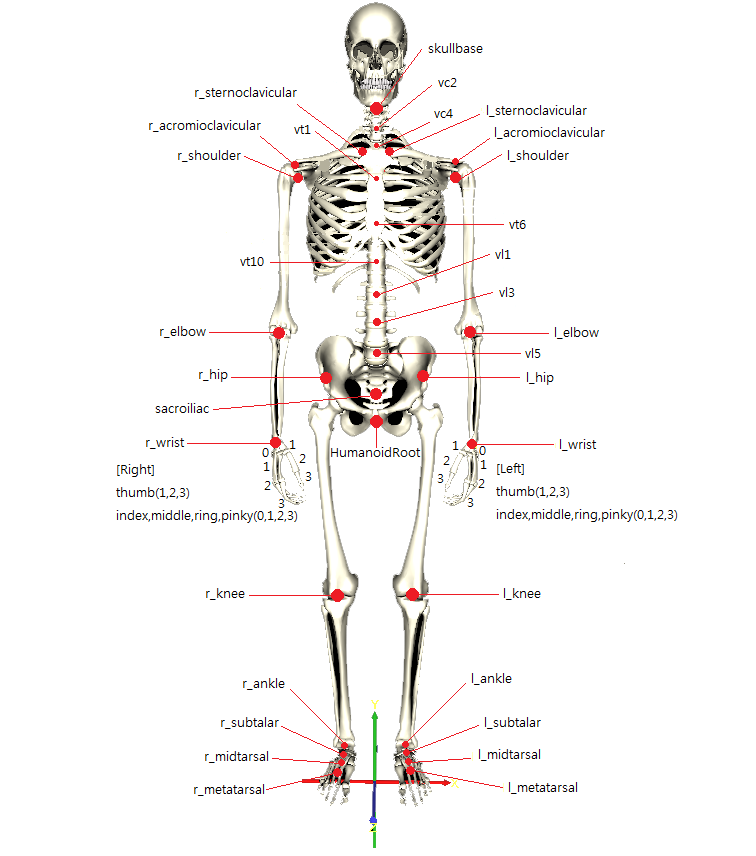 /> />
|
| 21 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA3.png'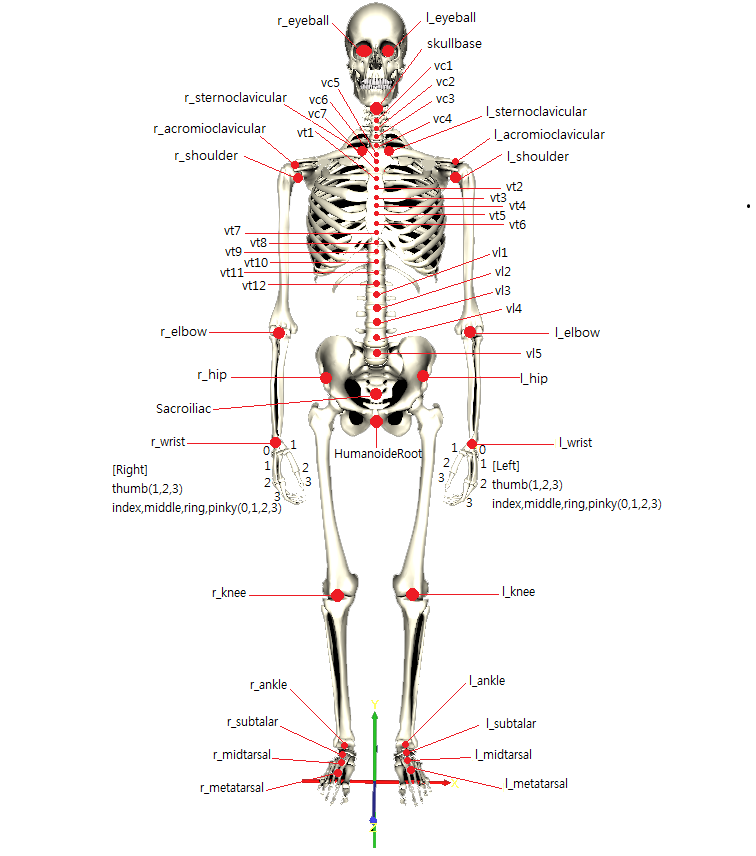 /> />
|
| 22 | <meta name='reference' content='Norman Badler et al., ANTHROPOMETRY FOR COMPUTER GRAPHICS HUMAN FIGURES, University of Pennsylvania, 1989.'/> |
| 23 | <meta name='reference' content='http://www.cis.upenn.edu/~badler/anthro/89-71.ps'/> |
| 24 | <meta name='reference' content=' tables/AnthropometryForComputerGraphicsHumanFigures89-71.pdf '/> |
| 25 | <meta name='creator' content='Matthew T. Beitler, Joe D. Williams, Don Brutzman'/> |
| 26 | <meta name='translator' content='Don Brutzman and Joe Williams'/> |
| 27 | <meta name='generator' content='BS Contact Geo 8.001, http://www.bitmanagement.de/en/products/interactive-3d-clients/bs-contact-geo'/> |
| 28 | <meta name='reference' content='originals/LOA3ExampleSourceWithDiamondsOriginal.wrl'/> |
| 29 | <meta name='reference' content=' originals/LOA3ExampleSourceWithDiamondsOriginal.x3d '/> |
| 30 | <meta name='reference' content=' originals/LOA3ExampleSourceWithDiamondsOriginalBsContactExport.x3d '/> |
| 31 | <meta name='generator' content='X3D-Edit 3.3, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 32 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Specifications/HAnimSpecificationLOA3Animation.x3d '/> |
| 33 | <meta name='license' content='../license.html'/> |
| 34 | </head> |
HAnimHumanoid model visualization report: humanoid HAnimHumanoid Report
Event Graph ROUTE Table shows event connections.
-->
<!--
![]() DEF nodes index:
_RollInterpolator,
Backing,
BehaviorSynchronization,
Circle0,
Circle1,
Circle2,
Clear,
CoordinateAxes,
CoordinateAxesAdjustedScale,
cordsys,
DiamondIFS,
hanim_back_view,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_feet_front_close_view,
hanim_front_close_view,
hanim_front_view,
hanim_head_front_close_view,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
HudProximitySensor,
HudXform,
Jump,
Jump_Back,
Jump_head_RotationInterpolator,
Jump_l_acromioclavicular_RollInterpolator,
Jump_l_ankle_RotationInterpolator,
Jump_l_elbow_RotationInterpolator,
Jump_l_hip_RotationInterpolator,
Jump_l_knee_RotationInterpolator,
Jump_l_shoulder_RotationInterpolator,
Jump_l_sternoclavicular_RollInterpolator,
Jump_l_thumb1_PitchInterpolator,
Jump_l_wrist_RotationInterpolator,
Jump_lower_body_RotationInterpolator,
Jump_neck_RotationInterpolator,
Jump_r_acromioclavicular_RollInterpolator,
Jump_r_ankle_RotationInterpolator,
Jump_r_elbow_RotationInterpolator,
Jump_r_hip_RotationInterpolator,
Jump_r_knee_RotationInterpolator,
Jump_r_metatarsal_PitchInterpolator,
Jump_r_shoulder_RotationInterpolator,
Jump_r_sternoclavicular_RollInterpolator,
Jump_r_thumb1_PitchInterpolator,
Jump_r_wrist_RotationInterpolator,
Jump_sacroiliac_YawInterpolator,
Jump_Touch,
Jump_upper_body_RotationInterpolator,
Jump_vc6_YawInterpolator,
Jump_vl5_YawInterpolator,
Jump_whole_body_RotationInterpolator,
Jump_whole_body_TranslationInterpolator,
JumpAnimation,
JumpTimer,
JumpTransform,
Kick_Back,
Kick_l_acromioclavicular_RollInterpolator,
Kick_l_ForeArm_PitchInterpolator,
Kick_l_hip_PitchInterpolator,
Kick_l_knee_PitchInterpolator,
Kick_l_shoulder_RollInterpolator,
Kick_l_sternoclavicular_RollInterpolator,
Kick_l_thumb1_PitchInterpolator,
Kick_l_wrist_RollInterpolator,
Kick_lower_body_RotationInterpolator,
Kick_neck_RotationInterpolator,
Kick_r_acromioclavicular_RollInterpolator,
Kick_r_ankle_PitchInterpolator,
Kick_r_ForeArm_PitchInterpolator,
Kick_r_hip_PitchInterpolator,
Kick_r_knee_PitchInterpolator,
Kick_r_metatarsal_PitchInterpolator,
Kick_r_shoulder_RollInterpolator,
Kick_r_sternoclavicular_RollInterpolator,
Kick_r_thumb1_PitchInterpolator,
Kick_r_wrist_RollInterpolator,
Kick_sacroiliac_YawInterpolator,
Kick_Touch,
Kick_upper_body_RotationInterpolator,
Kick_vc6_YawInterpolator,
Kick_vl5_YawInterpolator,
Kick_whole_body_RotationInterpolator,
Kick_whole_body_TranslationInterpolator,
KickAnimation,
KickText,
KickTimer,
KickTransform,
Orbit1,
Original_WorldInfo,
Pitch_Back,
Pitch_l_acromioclavicular_RollInterpolator,
Pitch_l_sternoclavicular_RollInterpolator,
Pitch_l_thumb1_PitchInterpolator,
Pitch_r_acromioclavicular_RollInterpolator,
Pitch_r_metatarsal_PitchInterpolator,
Pitch_r_sternoclavicular_RollInterpolator,
Pitch_r_thumb1_PitchInterpolator,
Pitch_sacroiliac_YawInterpolator,
Pitch_Touch,
Pitch_vc6_YawInterpolator,
Pitch_vl5_YawInterpolator,
Pitches_head_RotationInterpolator,
Pitches_l_ankle_RotationInterpolator,
Pitches_l_elbow_RotationInterpolator,
Pitches_l_hip_RotationInterpolator,
Pitches_l_knee_RotationInterpolator,
Pitches_l_shoulder_RotationInterpolator,
Pitches_l_wrist_RotationInterpolator,
Pitches_lower_body_RotationInterpolator,
Pitches_neck_RotationInterpolator,
Pitches_r_ankle_RotationInterpolator,
Pitches_r_elbow_RotationInterpolator,
Pitches_r_hip_RotationInterpolator,
Pitches_r_knee_RotationInterpolator,
Pitches_r_shoulder_RotationInterpolator,
Pitches_r_wrist_RotationInterpolator,
Pitches_upper_body_RotationInterpolator,
Pitches_whole_body_RotationInterpolator,
Pitches_whole_body_TranslationInterpolator,
PitchesAnimation,
PitchTextShape,
PitchTimer,
PitchTransform,
Roll_Back,
Roll_l_acromioclavicular_RollInterpolator,
Roll_l_sternoclavicular_RollInterpolator,
Roll_l_thumb1_PitchInterpolator,
Roll_r_acromioclavicular_RollInterpolator,
Roll_r_metatarsal_PitchInterpolator,
Roll_r_sternoclavicular_RollInterpolator,
Roll_r_thumb1_PitchInterpolator,
Roll_sacroiliac_YawInterpolator,
Roll_Touch,
Roll_vc6_YawInterpolator,
Roll_vl5_YawInterpolator,
Rolls_head_RotationInterpolator,
Rolls_l_ankle_RotationInterpolator,
Rolls_l_elbow_RotationInterpolator,
Rolls_l_hip_RotationInterpolator,
Rolls_l_knee_RotationInterpolator,
Rolls_l_shoulder_RotationInterpolator,
Rolls_l_wrist_RotationInterpolator,
Rolls_lower_body_RotationInterpolator,
Rolls_neck_RotationInterpolator,
Rolls_r_ankle_RotationInterpolator,
Rolls_r_elbow_RotationInterpolator,
Rolls_r_hip_RotationInterpolator,
Rolls_r_knee_RotationInterpolator,
Rolls_r_shoulder_RotationInterpolator,
Rolls_r_wrist_RotationInterpolator,
Rolls_upper_body_RotationInterpolator,
Rolls_whole_body_RotationInterpolator,
Rolls_whole_body_TranslationInterpolator,
RollsAnimation,
RollTimer,
RollTransform,
Run_Back,
Run_head_RotationInterpolator_Run,
Run_l_acromioclavicular_RollInterpolator,
Run_l_ankle_RotationInterpolator_Run,
Run_l_elbow_RotationInterpolator_Run,
Run_l_hip_RotationInterpolator_Run,
Run_l_knee_RotationInterpolator_Run,
Run_l_shoulder_RotationInterpolator_Run,
Run_l_sternoclavicular_RollInterpolator,
Run_l_thumb1_PitchInterpolator,
Run_l_wrist_RotationInterpolator_Run,
Run_lower_body_RotationInterpolator_Run,
Run_neck_RotationInterpolator_Run,
Run_r_acromioclavicular_RollInterpolator,
Run_r_ankle_RotationInterpolator_Run,
Run_r_elbow_RotationInterpolator_Run,
Run_r_hip_RotationInterpolator_Run,
Run_r_knee_RotationInterpolator_Run,
Run_r_metatarsal_PitchInterpolator,
Run_r_shoulder_RotationInterpolator_Run,
Run_r_sternoclavicular_RollInterpolator,
Run_r_thumb1_PitchInterpolator,
Run_r_wrist_RotationInterpolator_Run,
Run_sacroiliac_YawInterpolator,
Run_Touch,
Run_upper_body_RotationInterpolator_Run,
Run_vc6_YawInterpolator,
Run_vl5_YawInterpolator,
Run_whole_body_RotationInterpolator_Run,
Run_whole_body_TranslationInterpolator_Run,
RunAnimation,
RunText,
RunTimer,
RunTransform,
SiteViewpointDiamondIFS,
Stage,
Stand_Back,
Stand_head_RotationInterpolator,
Stand_l_acromioclavicular_RollInterpolator,
Stand_l_ankle_RotationInterpolator,
Stand_l_elbow_RotationInterpolator,
Stand_l_eyeball_RotationInterpolator,
Stand_l_hip_RotationInterpolator,
Stand_l_knee_RotationInterpolator,
Stand_l_shoulder_RotationInterpolator,
Stand_l_sternoclavicular_RollInterpolator,
Stand_l_thumb1_PitchInterpolator,
Stand_l_wrist_RotationInterpolator,
Stand_lower_body_RotationInterpolator,
Stand_neck_RotationInterpolator,
Stand_r_acromioclavicular_RollInterpolator,
Stand_r_ankle_RotationInterpolator,
Stand_r_elbow_RotationInterpolator,
Stand_r_eyeball_RotationInterpolator,
Stand_r_hip_RotationInterpolator,
Stand_r_index1_RollInterpolator,
Stand_r_index2_RollInterpolator,
Stand_r_index3_RollInterpolator,
Stand_r_knee_RotationInterpolator,
Stand_r_metatarsal_PitchInterpolator,
Stand_r_shoulder_RotationInterpolator,
Stand_r_sternoclavicular_RollInterpolator,
Stand_r_thumb1_PitchInterpolator,
Stand_r_wrist_RotationInterpolator,
Stand_sacroiliac_YawInterpolator,
Stand_Touch,
Stand_upper_body_RotationInterpolator,
Stand_vc6_YawInterpolator,
Stand_vl5_YawInterpolator,
Stand_whole_body_RotationInterpolator,
Stand_whole_body_TranslationInterpolator,
StandAnimation,
StandTextShape,
StandTimer,
StandTransform,
Stop_Back,
Stop_HumanoidRoot_RotationInterpolator,
Stop_HumanoidRoot_TranslationInterpolator,
Stop_l_acromioclavicular_RotationInterpolator,
Stop_l_ankle_RotationInterpolator,
Stop_l_elbow_RotationInterpolator,
Stop_l_eyeball_joint_RotationInterpolator,
Stop_l_hip_RotationInterpolator,
Stop_l_index0_RotationInterpolator,
Stop_l_index1_RotationInterpolator,
Stop_l_index2_RotationInterpolator,
Stop_l_index3_RotationInterpolator,
Stop_l_knee_RotationInterpolator,
Stop_l_metatarsal_RotationInterpolator,
Stop_l_middle0_RotationInterpolator,
Stop_l_middle1_RotationInterpolator,
Stop_l_middle2_RotationInterpolator,
Stop_l_middle3_RotationInterpolator,
Stop_l_midtarsal_RotationInterpolator,
Stop_l_pinky0_RotationInterpolator,
Stop_l_pinky1_RotationInterpolator,
Stop_l_pinky2_RotationInterpolator,
Stop_l_pinky3_RotationInterpolator,
Stop_l_ring0_RotationInterpolator,
Stop_l_ring1_RotationInterpolator,
Stop_l_ring2_RotationInterpolator,
Stop_l_ring3_RotationInterpolator,
Stop_l_shoulder_RotationInterpolator,
Stop_l_sternoclavicular_RotationInterpolator,
Stop_l_subtalar_RotationInterpolator,
Stop_l_thumb1_RotationInterpolator,
Stop_l_thumb2_RotationInterpolator,
Stop_l_thumb3_RotationInterpolator,
Stop_l_wrist_RotationInterpolator,
Stop_r_acromioclavicular_RotationInterpolator,
Stop_r_ankle_RotationInterpolator,
Stop_r_elbow_RotationInterpolator,
Stop_r_eyeball_joint_RotationInterpolator,
Stop_r_hip_RotationInterpolator,
Stop_r_index0_RotationInterpolator,
Stop_r_index1_RotationInterpolator,
Stop_r_index2_RotationInterpolator,
Stop_r_index3_RotationInterpolator,
Stop_r_knee_RotationInterpolator,
Stop_r_metatarsal_RotationInterpolator,
Stop_r_middle0_RotationInterpolator,
Stop_r_middle1_RotationInterpolator,
Stop_r_middle2_RotationInterpolator,
Stop_r_middle3_RotationInterpolator,
Stop_r_midtarsal_RotationInterpolator,
Stop_r_pinky0_RotationInterpolator,
Stop_r_pinky1_RotationInterpolator,
Stop_r_pinky2_RotationInterpolator,
Stop_r_pinky3_RotationInterpolator,
Stop_r_ring0_RotationInterpolator,
Stop_r_ring1_RotationInterpolator,
Stop_r_ring2_RotationInterpolator,
Stop_r_ring3_RotationInterpolator,
Stop_r_shoulder_RotationInterpolator,
Stop_r_sternoclavicular_RotationInterpolator,
Stop_r_subtalar_RotationInterpolator,
Stop_r_thumb1_RotationInterpolator,
Stop_r_thumb2_RotationInterpolator,
Stop_r_thumb3_RotationInterpolator,
Stop_r_wrist_RotationInterpolator,
Stop_sacroiliac_RotationInterpolator,
Stop_skullbase_RotationInterpolator,
Stop_Text,
Stop_Touch,
Stop_vc1_RotationInterpolator,
Stop_vc2_RotationInterpolator,
Stop_vc3_RotationInterpolator,
Stop_vc4_RotationInterpolator,
Stop_vc5_RotationInterpolator,
Stop_vc6_RotationInterpolator,
Stop_vc7_RotationInterpolator,
Stop_vl1_RotationInterpolator,
Stop_vl2_RotationInterpolator,
Stop_vl3_RotationInterpolator,
Stop_vl4_RotationInterpolator,
Stop_vl5_RotationInterpolator,
Stop_vt1_RotationInterpolator,
Stop_vt10_RotationInterpolator,
Stop_vt11_RotationInterpolator,
Stop_vt12_RotationInterpolator,
Stop_vt2_RotationInterpolator,
Stop_vt3_RotationInterpolator,
Stop_vt4_RotationInterpolator,
Stop_vt5_RotationInterpolator,
Stop_vt6_RotationInterpolator,
Stop_vt7_RotationInterpolator,
Stop_vt8_RotationInterpolator,
Stop_vt9_RotationInterpolator,
StopAnimation,
StopText,
StopTimer,
text_color,
UserInterface,
Walk_Back,
Walk_head_RotationInterpolator,
Walk_l_acromioclavicular_RollInterpolator,
Walk_l_ankle_RotationInterpolator,
Walk_l_elbow_RotationInterpolator,
Walk_l_hip_RotationInterpolator,
Walk_l_knee_RotationInterpolator,
Walk_l_shoulder_RotationInterpolator,
Walk_l_sternoclavicular_RollInterpolator,
Walk_l_thumb1_PitchInterpolator,
Walk_l_wrist_RotationInterpolator,
Walk_lower_body_RotationInterpolator,
Walk_neck_RotationInterpolator,
Walk_r_acromioclavicular_RollInterpolator,
Walk_r_ankle_RotationInterpolator,
Walk_r_elbow_RotationInterpolator,
Walk_r_hip_RotationInterpolator,
Walk_r_knee_RotationInterpolator,
Walk_r_metatarsal_PitchInterpolator,
Walk_r_shoulder_RotationInterpolator,
Walk_r_sternoclavicular_RollInterpolator,
Walk_r_thumb1_PitchInterpolator,
Walk_r_wrist_RotationInterpolator,
Walk_sacroiliac_YawInterpolator,
Walk_Touch,
Walk_upper_body_RotationInterpolator,
Walk_vc6_YawInterpolator,
Walk_vl5_YawInterpolator,
Walk_whole_body_RotationInterpolator,
Walk_whole_body_TranslationInterpolator,
WalkAnimation,
WalkText,
WalkTimer,
WalkTransform,
Yaw_Back,
Yaw_l_acromioclavicular_RollInterpolator,
Yaw_l_sternoclavicular_RollInterpolator,
Yaw_l_thumb1_PitchInterpolator,
Yaw_r_acromioclavicular_RollInterpolator,
Yaw_r_metatarsal_PitchInterpolator,
Yaw_r_sternoclavicular_RollInterpolator,
Yaw_r_thumb1_PitchInterpolator,
Yaw_sacroiliac_YawInterpolator,
Yaw_Touch,
Yaw_vc6_YawInterpolator,
Yaw_vl5_YawInterpolator,
Yaws_head_RotationInterpolator,
Yaws_l_ankle_RotationInterpolator,
Yaws_l_elbow_RotationInterpolator,
Yaws_l_hip_RotationInterpolator,
Yaws_l_knee_RotationInterpolator,
Yaws_l_shoulder_RotationInterpolator,
Yaws_l_wrist_RotationInterpolator,
Yaws_lower_body_RotationInterpolator,
Yaws_neck_RotationInterpolator,
Yaws_r_ankle_RotationInterpolator,
Yaws_r_elbow_RotationInterpolator,
Yaws_r_hip_RotationInterpolator,
Yaws_r_knee_RotationInterpolator,
Yaws_r_shoulder_RotationInterpolator,
Yaws_r_wrist_RotationInterpolator,
Yaws_upper_body_RotationInterpolator,
Yaws_whole_body_RotationInterpolator,
Yaws_whole_body_TranslationInterpolator,
YawsAnimation,
YawText,
YawTimer,
YawTransform
DEF nodes index:
_RollInterpolator,
Backing,
BehaviorSynchronization,
Circle0,
Circle1,
Circle2,
Clear,
CoordinateAxes,
CoordinateAxesAdjustedScale,
cordsys,
DiamondIFS,
hanim_back_view,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_feet_front_close_view,
hanim_front_close_view,
hanim_front_view,
hanim_head_front_close_view,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
HudProximitySensor,
HudXform,
Jump,
Jump_Back,
Jump_head_RotationInterpolator,
Jump_l_acromioclavicular_RollInterpolator,
Jump_l_ankle_RotationInterpolator,
Jump_l_elbow_RotationInterpolator,
Jump_l_hip_RotationInterpolator,
Jump_l_knee_RotationInterpolator,
Jump_l_shoulder_RotationInterpolator,
Jump_l_sternoclavicular_RollInterpolator,
Jump_l_thumb1_PitchInterpolator,
Jump_l_wrist_RotationInterpolator,
Jump_lower_body_RotationInterpolator,
Jump_neck_RotationInterpolator,
Jump_r_acromioclavicular_RollInterpolator,
Jump_r_ankle_RotationInterpolator,
Jump_r_elbow_RotationInterpolator,
Jump_r_hip_RotationInterpolator,
Jump_r_knee_RotationInterpolator,
Jump_r_metatarsal_PitchInterpolator,
Jump_r_shoulder_RotationInterpolator,
Jump_r_sternoclavicular_RollInterpolator,
Jump_r_thumb1_PitchInterpolator,
Jump_r_wrist_RotationInterpolator,
Jump_sacroiliac_YawInterpolator,
Jump_Touch,
Jump_upper_body_RotationInterpolator,
Jump_vc6_YawInterpolator,
Jump_vl5_YawInterpolator,
Jump_whole_body_RotationInterpolator,
Jump_whole_body_TranslationInterpolator,
JumpAnimation,
JumpTimer,
JumpTransform,
Kick_Back,
Kick_l_acromioclavicular_RollInterpolator,
Kick_l_ForeArm_PitchInterpolator,
Kick_l_hip_PitchInterpolator,
Kick_l_knee_PitchInterpolator,
Kick_l_shoulder_RollInterpolator,
Kick_l_sternoclavicular_RollInterpolator,
Kick_l_thumb1_PitchInterpolator,
Kick_l_wrist_RollInterpolator,
Kick_lower_body_RotationInterpolator,
Kick_neck_RotationInterpolator,
Kick_r_acromioclavicular_RollInterpolator,
Kick_r_ankle_PitchInterpolator,
Kick_r_ForeArm_PitchInterpolator,
Kick_r_hip_PitchInterpolator,
Kick_r_knee_PitchInterpolator,
Kick_r_metatarsal_PitchInterpolator,
Kick_r_shoulder_RollInterpolator,
Kick_r_sternoclavicular_RollInterpolator,
Kick_r_thumb1_PitchInterpolator,
Kick_r_wrist_RollInterpolator,
Kick_sacroiliac_YawInterpolator,
Kick_Touch,
Kick_upper_body_RotationInterpolator,
Kick_vc6_YawInterpolator,
Kick_vl5_YawInterpolator,
Kick_whole_body_RotationInterpolator,
Kick_whole_body_TranslationInterpolator,
KickAnimation,
KickText,
KickTimer,
KickTransform,
Orbit1,
Original_WorldInfo,
Pitch_Back,
Pitch_l_acromioclavicular_RollInterpolator,
Pitch_l_sternoclavicular_RollInterpolator,
Pitch_l_thumb1_PitchInterpolator,
Pitch_r_acromioclavicular_RollInterpolator,
Pitch_r_metatarsal_PitchInterpolator,
Pitch_r_sternoclavicular_RollInterpolator,
Pitch_r_thumb1_PitchInterpolator,
Pitch_sacroiliac_YawInterpolator,
Pitch_Touch,
Pitch_vc6_YawInterpolator,
Pitch_vl5_YawInterpolator,
Pitches_head_RotationInterpolator,
Pitches_l_ankle_RotationInterpolator,
Pitches_l_elbow_RotationInterpolator,
Pitches_l_hip_RotationInterpolator,
Pitches_l_knee_RotationInterpolator,
Pitches_l_shoulder_RotationInterpolator,
Pitches_l_wrist_RotationInterpolator,
Pitches_lower_body_RotationInterpolator,
Pitches_neck_RotationInterpolator,
Pitches_r_ankle_RotationInterpolator,
Pitches_r_elbow_RotationInterpolator,
Pitches_r_hip_RotationInterpolator,
Pitches_r_knee_RotationInterpolator,
Pitches_r_shoulder_RotationInterpolator,
Pitches_r_wrist_RotationInterpolator,
Pitches_upper_body_RotationInterpolator,
Pitches_whole_body_RotationInterpolator,
Pitches_whole_body_TranslationInterpolator,
PitchesAnimation,
PitchTextShape,
PitchTimer,
PitchTransform,
Roll_Back,
Roll_l_acromioclavicular_RollInterpolator,
Roll_l_sternoclavicular_RollInterpolator,
Roll_l_thumb1_PitchInterpolator,
Roll_r_acromioclavicular_RollInterpolator,
Roll_r_metatarsal_PitchInterpolator,
Roll_r_sternoclavicular_RollInterpolator,
Roll_r_thumb1_PitchInterpolator,
Roll_sacroiliac_YawInterpolator,
Roll_Touch,
Roll_vc6_YawInterpolator,
Roll_vl5_YawInterpolator,
Rolls_head_RotationInterpolator,
Rolls_l_ankle_RotationInterpolator,
Rolls_l_elbow_RotationInterpolator,
Rolls_l_hip_RotationInterpolator,
Rolls_l_knee_RotationInterpolator,
Rolls_l_shoulder_RotationInterpolator,
Rolls_l_wrist_RotationInterpolator,
Rolls_lower_body_RotationInterpolator,
Rolls_neck_RotationInterpolator,
Rolls_r_ankle_RotationInterpolator,
Rolls_r_elbow_RotationInterpolator,
Rolls_r_hip_RotationInterpolator,
Rolls_r_knee_RotationInterpolator,
Rolls_r_shoulder_RotationInterpolator,
Rolls_r_wrist_RotationInterpolator,
Rolls_upper_body_RotationInterpolator,
Rolls_whole_body_RotationInterpolator,
Rolls_whole_body_TranslationInterpolator,
RollsAnimation,
RollTimer,
RollTransform,
Run_Back,
Run_head_RotationInterpolator_Run,
Run_l_acromioclavicular_RollInterpolator,
Run_l_ankle_RotationInterpolator_Run,
Run_l_elbow_RotationInterpolator_Run,
Run_l_hip_RotationInterpolator_Run,
Run_l_knee_RotationInterpolator_Run,
Run_l_shoulder_RotationInterpolator_Run,
Run_l_sternoclavicular_RollInterpolator,
Run_l_thumb1_PitchInterpolator,
Run_l_wrist_RotationInterpolator_Run,
Run_lower_body_RotationInterpolator_Run,
Run_neck_RotationInterpolator_Run,
Run_r_acromioclavicular_RollInterpolator,
Run_r_ankle_RotationInterpolator_Run,
Run_r_elbow_RotationInterpolator_Run,
Run_r_hip_RotationInterpolator_Run,
Run_r_knee_RotationInterpolator_Run,
Run_r_metatarsal_PitchInterpolator,
Run_r_shoulder_RotationInterpolator_Run,
Run_r_sternoclavicular_RollInterpolator,
Run_r_thumb1_PitchInterpolator,
Run_r_wrist_RotationInterpolator_Run,
Run_sacroiliac_YawInterpolator,
Run_Touch,
Run_upper_body_RotationInterpolator_Run,
Run_vc6_YawInterpolator,
Run_vl5_YawInterpolator,
Run_whole_body_RotationInterpolator_Run,
Run_whole_body_TranslationInterpolator_Run,
RunAnimation,
RunText,
RunTimer,
RunTransform,
SiteViewpointDiamondIFS,
Stage,
Stand_Back,
Stand_head_RotationInterpolator,
Stand_l_acromioclavicular_RollInterpolator,
Stand_l_ankle_RotationInterpolator,
Stand_l_elbow_RotationInterpolator,
Stand_l_eyeball_RotationInterpolator,
Stand_l_hip_RotationInterpolator,
Stand_l_knee_RotationInterpolator,
Stand_l_shoulder_RotationInterpolator,
Stand_l_sternoclavicular_RollInterpolator,
Stand_l_thumb1_PitchInterpolator,
Stand_l_wrist_RotationInterpolator,
Stand_lower_body_RotationInterpolator,
Stand_neck_RotationInterpolator,
Stand_r_acromioclavicular_RollInterpolator,
Stand_r_ankle_RotationInterpolator,
Stand_r_elbow_RotationInterpolator,
Stand_r_eyeball_RotationInterpolator,
Stand_r_hip_RotationInterpolator,
Stand_r_index1_RollInterpolator,
Stand_r_index2_RollInterpolator,
Stand_r_index3_RollInterpolator,
Stand_r_knee_RotationInterpolator,
Stand_r_metatarsal_PitchInterpolator,
Stand_r_shoulder_RotationInterpolator,
Stand_r_sternoclavicular_RollInterpolator,
Stand_r_thumb1_PitchInterpolator,
Stand_r_wrist_RotationInterpolator,
Stand_sacroiliac_YawInterpolator,
Stand_Touch,
Stand_upper_body_RotationInterpolator,
Stand_vc6_YawInterpolator,
Stand_vl5_YawInterpolator,
Stand_whole_body_RotationInterpolator,
Stand_whole_body_TranslationInterpolator,
StandAnimation,
StandTextShape,
StandTimer,
StandTransform,
Stop_Back,
Stop_HumanoidRoot_RotationInterpolator,
Stop_HumanoidRoot_TranslationInterpolator,
Stop_l_acromioclavicular_RotationInterpolator,
Stop_l_ankle_RotationInterpolator,
Stop_l_elbow_RotationInterpolator,
Stop_l_eyeball_joint_RotationInterpolator,
Stop_l_hip_RotationInterpolator,
Stop_l_index0_RotationInterpolator,
Stop_l_index1_RotationInterpolator,
Stop_l_index2_RotationInterpolator,
Stop_l_index3_RotationInterpolator,
Stop_l_knee_RotationInterpolator,
Stop_l_metatarsal_RotationInterpolator,
Stop_l_middle0_RotationInterpolator,
Stop_l_middle1_RotationInterpolator,
Stop_l_middle2_RotationInterpolator,
Stop_l_middle3_RotationInterpolator,
Stop_l_midtarsal_RotationInterpolator,
Stop_l_pinky0_RotationInterpolator,
Stop_l_pinky1_RotationInterpolator,
Stop_l_pinky2_RotationInterpolator,
Stop_l_pinky3_RotationInterpolator,
Stop_l_ring0_RotationInterpolator,
Stop_l_ring1_RotationInterpolator,
Stop_l_ring2_RotationInterpolator,
Stop_l_ring3_RotationInterpolator,
Stop_l_shoulder_RotationInterpolator,
Stop_l_sternoclavicular_RotationInterpolator,
Stop_l_subtalar_RotationInterpolator,
Stop_l_thumb1_RotationInterpolator,
Stop_l_thumb2_RotationInterpolator,
Stop_l_thumb3_RotationInterpolator,
Stop_l_wrist_RotationInterpolator,
Stop_r_acromioclavicular_RotationInterpolator,
Stop_r_ankle_RotationInterpolator,
Stop_r_elbow_RotationInterpolator,
Stop_r_eyeball_joint_RotationInterpolator,
Stop_r_hip_RotationInterpolator,
Stop_r_index0_RotationInterpolator,
Stop_r_index1_RotationInterpolator,
Stop_r_index2_RotationInterpolator,
Stop_r_index3_RotationInterpolator,
Stop_r_knee_RotationInterpolator,
Stop_r_metatarsal_RotationInterpolator,
Stop_r_middle0_RotationInterpolator,
Stop_r_middle1_RotationInterpolator,
Stop_r_middle2_RotationInterpolator,
Stop_r_middle3_RotationInterpolator,
Stop_r_midtarsal_RotationInterpolator,
Stop_r_pinky0_RotationInterpolator,
Stop_r_pinky1_RotationInterpolator,
Stop_r_pinky2_RotationInterpolator,
Stop_r_pinky3_RotationInterpolator,
Stop_r_ring0_RotationInterpolator,
Stop_r_ring1_RotationInterpolator,
Stop_r_ring2_RotationInterpolator,
Stop_r_ring3_RotationInterpolator,
Stop_r_shoulder_RotationInterpolator,
Stop_r_sternoclavicular_RotationInterpolator,
Stop_r_subtalar_RotationInterpolator,
Stop_r_thumb1_RotationInterpolator,
Stop_r_thumb2_RotationInterpolator,
Stop_r_thumb3_RotationInterpolator,
Stop_r_wrist_RotationInterpolator,
Stop_sacroiliac_RotationInterpolator,
Stop_skullbase_RotationInterpolator,
Stop_Text,
Stop_Touch,
Stop_vc1_RotationInterpolator,
Stop_vc2_RotationInterpolator,
Stop_vc3_RotationInterpolator,
Stop_vc4_RotationInterpolator,
Stop_vc5_RotationInterpolator,
Stop_vc6_RotationInterpolator,
Stop_vc7_RotationInterpolator,
Stop_vl1_RotationInterpolator,
Stop_vl2_RotationInterpolator,
Stop_vl3_RotationInterpolator,
Stop_vl4_RotationInterpolator,
Stop_vl5_RotationInterpolator,
Stop_vt1_RotationInterpolator,
Stop_vt10_RotationInterpolator,
Stop_vt11_RotationInterpolator,
Stop_vt12_RotationInterpolator,
Stop_vt2_RotationInterpolator,
Stop_vt3_RotationInterpolator,
Stop_vt4_RotationInterpolator,
Stop_vt5_RotationInterpolator,
Stop_vt6_RotationInterpolator,
Stop_vt7_RotationInterpolator,
Stop_vt8_RotationInterpolator,
Stop_vt9_RotationInterpolator,
StopAnimation,
StopText,
StopTimer,
text_color,
UserInterface,
Walk_Back,
Walk_head_RotationInterpolator,
Walk_l_acromioclavicular_RollInterpolator,
Walk_l_ankle_RotationInterpolator,
Walk_l_elbow_RotationInterpolator,
Walk_l_hip_RotationInterpolator,
Walk_l_knee_RotationInterpolator,
Walk_l_shoulder_RotationInterpolator,
Walk_l_sternoclavicular_RollInterpolator,
Walk_l_thumb1_PitchInterpolator,
Walk_l_wrist_RotationInterpolator,
Walk_lower_body_RotationInterpolator,
Walk_neck_RotationInterpolator,
Walk_r_acromioclavicular_RollInterpolator,
Walk_r_ankle_RotationInterpolator,
Walk_r_elbow_RotationInterpolator,
Walk_r_hip_RotationInterpolator,
Walk_r_knee_RotationInterpolator,
Walk_r_metatarsal_PitchInterpolator,
Walk_r_shoulder_RotationInterpolator,
Walk_r_sternoclavicular_RollInterpolator,
Walk_r_thumb1_PitchInterpolator,
Walk_r_wrist_RotationInterpolator,
Walk_sacroiliac_YawInterpolator,
Walk_Touch,
Walk_upper_body_RotationInterpolator,
Walk_vc6_YawInterpolator,
Walk_vl5_YawInterpolator,
Walk_whole_body_RotationInterpolator,
Walk_whole_body_TranslationInterpolator,
WalkAnimation,
WalkText,
WalkTimer,
WalkTransform,
Yaw_Back,
Yaw_l_acromioclavicular_RollInterpolator,
Yaw_l_sternoclavicular_RollInterpolator,
Yaw_l_thumb1_PitchInterpolator,
Yaw_r_acromioclavicular_RollInterpolator,
Yaw_r_metatarsal_PitchInterpolator,
Yaw_r_sternoclavicular_RollInterpolator,
Yaw_r_thumb1_PitchInterpolator,
Yaw_sacroiliac_YawInterpolator,
Yaw_Touch,
Yaw_vc6_YawInterpolator,
Yaw_vl5_YawInterpolator,
Yaws_head_RotationInterpolator,
Yaws_l_ankle_RotationInterpolator,
Yaws_l_elbow_RotationInterpolator,
Yaws_l_hip_RotationInterpolator,
Yaws_l_knee_RotationInterpolator,
Yaws_l_shoulder_RotationInterpolator,
Yaws_l_wrist_RotationInterpolator,
Yaws_lower_body_RotationInterpolator,
Yaws_neck_RotationInterpolator,
Yaws_r_ankle_RotationInterpolator,
Yaws_r_elbow_RotationInterpolator,
Yaws_r_hip_RotationInterpolator,
Yaws_r_knee_RotationInterpolator,
Yaws_r_shoulder_RotationInterpolator,
Yaws_r_wrist_RotationInterpolator,
Yaws_upper_body_RotationInterpolator,
Yaws_whole_body_RotationInterpolator,
Yaws_whole_body_TranslationInterpolator,
YawsAnimation,
YawText,
YawTimer,
YawTransform
Index for Viewpoint nodes: Viewpoint_1, Viewpoint_2, Viewpoint_3, Viewpoint_4, Viewpoint_5, Viewpoint_6, Viewpoint_7, Viewpoint_8, Viewpoint_9, hanim_back_viewpoint, hanim_chest_front_close_viewpoint, hanim_eye_level_viewpoint, hanim_feet_front_close_viewpoint, hanim_front_close_viewpoint, hanim_front_viewpoint, hanim_head_front_close_viewpoint, hanim_knees_front_close_viewpoint, hanim_l_eyeball_site_viewpoint, hanim_l_hand_front_viewpoint, hanim_l_inclined_viewpoint, hanim_l_side_viewpoint, hanim_pelvis_front_close_viewpoint, hanim_r_eyeball_site_viewpoint, hanim_r_hand_front_viewpoint, hanim_r_inclined_viewpoint, hanim_side_close_viewpoint, hanim_Top_viewpoint
-->| 35 | <Scene> |
| 36 | <Background skyColor='0.3 0.3 0.3'/> |
| 37 | <NavigationInfo/> |
| 38 | <Group DEF='Original_WorldInfo'> |
| 39 | <WorldInfo info=' " HANIM 200x Default Joint Centers, Level-Of-Articulation 3 HANIM 200x (VRML97) Author name: eMpTy (a.k.a. Matthew T. Beitler) HANIM 200x (VRML97) Author email: beitler@cis.upenn.edu or beitler@acm.org HANIM 200x (VRML97) Author homepage: http://www.cis.upenn.edu/~beitler HANIM 200x (VRML97) Compliance Date: August 12, 2003 HANIM 200x Compliance Information: http://HAnim.org/Specifications/HAnim200x Construction Info (joint centers): The joint centers of this figure are based on the work of Norman Badler, director of the Center for Human Modeling and Simulation at the University of Pennsylvania. The original document which these joint centers are based on can be found at: http://www.cis.upenn.edu/~badler/anthro/89-71.ps " ' title='HANIM 200x Default Joint Centers, LOA3'/> |
| 40 | </Group> |
| 41 | <!-- TODO move viewpoints to be internal to HAnimHumanoid --> |
| 42 | <!-- Viewpoint centerOfRotation="0 0.9149 0.0016" matches initial at-rest locaton of the sacroliac. Note that these viewpoints are external to the HAnimHumanoid and do not move with the human. --> |
| 43 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front' position='0 0.4 4'/> |
| 44 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Close' position='0 0.8 2'/> |
| 45 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Front Closer' position='0 1.2 1'/> |
| 46 | <Viewpoint centerOfRotation='0 1.5 0.0016' description='Humanoid LOA 3 Front Face' position='0 1.63 1'/> |
| 47 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side' orientation='0 1 0 1.5708' position='2.6 0.8 0'/> |
| 48 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Right Side Close' orientation='0 1 0 1.2' position='1 0.8 0.5'/> |
| 49 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side Close' orientation='0 1 0 -1.2' position='-1 0.8 0.5'/> |
| 50 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Left Side' orientation='0 1 0 -1.5708' position='-2.6 0.8 0'/> |
| 51 | <Viewpoint centerOfRotation='0 0.9149 0.0016' description='Humanoid LOA 3 Top' orientation='1 0 0 -1.5708' position='0 3.5 0'/> |
| 52 | <HAnimHumanoid DEF='hanim_humanoid' info='"authorName=Matthew T. Beitler Joe D. Williams Don Brutzman" "authorEmail=HAnim@web3D.org" "copyright=none" "creationDate=12 May 1999" "usageRestrictions=none" "humanoidVersion=2.0" "height=1.7504"' name='humanoid'> |
| 53 |
<!-- HAnimJoint
hanim_humanoid_root is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_humanoid_root node: [from Stop_HumanoidRoot_TranslationInterpolator.value_changed to translation ] [from Stop_HumanoidRoot_RotationInterpolator.value_changed to rotation ] [from Stand_whole_body_RotationInterpolator.value_changed to rotation ] [from Stand_whole_body_TranslationInterpolator.value_changed to translation ] [from Pitches_whole_body_RotationInterpolator.value_changed to rotation ] [from Pitches_whole_body_TranslationInterpolator.value_changed to translation ] [from Yaws_whole_body_RotationInterpolator.value_changed to rotation ] [from Yaws_whole_body_TranslationInterpolator.value_changed to translation ] [from Rolls_whole_body_RotationInterpolator.value_changed to rotation ] [from Rolls_whole_body_TranslationInterpolator.value_changed to translation ] [from Walk_whole_body_RotationInterpolator.value_changed to rotation ] [from Walk_whole_body_TranslationInterpolator.value_changed to translation ] [from Run_whole_body_RotationInterpolator_Run.value_changed to rotation ] [from Run_whole_body_TranslationInterpolator_Run.value_changed to translation ] [from Jump_whole_body_RotationInterpolator.value_changed to rotation ] [from Jump_whole_body_TranslationInterpolator.value_changed to translation ] [from Kick_whole_body_RotationInterpolator.value_changed to rotation ] [from Kick_whole_body_TranslationInterpolator.value_changed to translation ] --> <HAnimJoint DEF='hanim_humanoid_root' center='0 0.824 0.0277' containerField='skeleton' name='humanoid_root'> |
| 54 |
<!-- HAnimSegment
hanim_sacrum is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_sacrum' name='sacrum'> |
| 55 | <!-- <HAnimJoint name='humanoid_root'/> visualization sphere within <HAnimSegment name='sacrum'/> --> |
| 56 | <TouchSensor description='HAnimJoint HumanoidRoot, HAnimSegment sacrum'/> |
| 57 | <Transform translation='0 0.824 0.0277'> |
| 58 |
<!-- Shape
HAnimJointShape is a DEF node that has 93 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92, USE_93 -->
<Shape DEF='HAnimJointShape'> |
| 59 | <Sphere radius='0.006'/> |
| 60 | <Appearance DEF='HAnimJointAppearance'> |
| 61 | <Material diffuseColor='1 0.5 0' transparency='0.5'/> |
| 62 | </Appearance> |
| 63 | </Shape> |
| 64 | </Transform> |
| 65 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='sacroiliac'/> --> |
| 66 | <Shape> |
| 67 | <LineSet vertexCount='2' containerField='geometry'> |
| 68 | <Coordinate point='0 0.824 0.0277 0 0.9149 0.0016'/> |
| 69 |
<!-- ColorRGBA
HAnimSegmentLineColorRGBA is a DEF node that has 92 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92 --> <ColorRGBA DEF='HAnimSegmentLineColorRGBA' color='1 1 0 1 1 1 0 0.1'/> |
| 70 | </LineSet> |
| 71 | </Shape> |
| 72 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='humanoid_root'/> to <HAnimJoint name='vl5'/> --> |
| 73 | <Shape> |
| 74 | <LineSet vertexCount='2' containerField='geometry'> |
| 75 | <Coordinate point='0 0.824 0.0277 0.0028 1.0568 -0.0776'/> |
| 76 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 77 | </LineSet> |
| 78 | </Shape> |
| 79 | </HAnimSegment> |
| 80 |
<!-- HAnimJoint
hanim_sacroiliac is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_sacroiliac node: [from Stop_sacroiliac_RotationInterpolator.value_changed to rotation ] [from Stand_lower_body_RotationInterpolator.value_changed to rotation ] [from Stand_sacroiliac_YawInterpolator.value_changed to rotation ] [from Pitches_lower_body_RotationInterpolator.value_changed to rotation ] [from Pitch_sacroiliac_YawInterpolator.value_changed to rotation ] [from Yaws_lower_body_RotationInterpolator.value_changed to rotation ] [from Yaw_sacroiliac_YawInterpolator.value_changed to rotation ] [from Rolls_lower_body_RotationInterpolator.value_changed to rotation ] [from Roll_sacroiliac_YawInterpolator.value_changed to rotation ] [from Walk_lower_body_RotationInterpolator.value_changed to rotation ] [from Walk_sacroiliac_YawInterpolator.value_changed to rotation ] [from Run_lower_body_RotationInterpolator_Run.value_changed to rotation ] [from Run_sacroiliac_YawInterpolator.value_changed to rotation ] [from Jump_lower_body_RotationInterpolator.value_changed to rotation ] [from Jump_sacroiliac_YawInterpolator.value_changed to rotation ] [from Kick_sacroiliac_YawInterpolator.value_changed to rotation ] [from Kick_lower_body_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_sacroiliac' center='0 0.9149 0.0016' name='sacroiliac'> |
| 81 |
<!-- HAnimSegment
hanim_pelvis is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_pelvis' name='pelvis'> |
| 82 | <!-- <HAnimJoint name='sacroiliac'/> visualization sphere within <HAnimSegment name='pelvis'/> --> |
| 83 | <TouchSensor description='HAnimJoint sacroiliac, HAnimSegment pelvis'/> |
| 84 | <Transform translation='0 0.9149 0.0016'> |
| 85 | <Shape USE='HAnimJointShape'/> |
| 86 | </Transform> |
| 87 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='l_hip'/> --> |
| 88 | <Shape> |
| 89 | <LineSet vertexCount='2' containerField='geometry'> |
| 90 | <Coordinate point='0 0.9149 0.0016 0.0961 0.9124 -0.0001'/> |
| 91 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 92 | </LineSet> |
| 93 | </Shape> |
| 94 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='sacroiliac'/> to <HAnimJoint name='r_hip'/> --> |
| 95 | <Shape> |
| 96 | <LineSet vertexCount='2' containerField='geometry'> |
| 97 | <Coordinate point='0 0.9149 0.0016 -0.0961 0.9124 -0.0001'/> |
| 98 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 99 | </LineSet> |
| 100 | </Shape> |
| 101 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_iliocristale'/> --> |
| 102 | <Shape> |
| 103 | <LineSet vertexCount='2' containerField='geometry'> |
| 104 | <Coordinate point='0 0.9149 0.0016 -0.1525 1.0628 0.0035'/> |
| 105 |
<!-- ColorRGBA
HAnimSiteLineColorRGBA is a DEF node that has 90 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90 --> <ColorRGBA DEF='HAnimSiteLineColorRGBA' color='1 0 0 1 1 0 0 0.1'/> |
| 106 | </LineSet> |
| 107 | </Shape> |
| 108 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_trochanterion'/> --> |
| 109 | <Shape> |
| 110 | <LineSet vertexCount='2' containerField='geometry'> |
| 111 | <Coordinate point='0 0.9149 0.0016 -0.1689 0.8419 0.0352'/> |
| 112 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 113 | </LineSet> |
| 114 | </Shape> |
| 115 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_iliocristale'/> --> |
| 116 | <Shape> |
| 117 | <LineSet vertexCount='2' containerField='geometry'> |
| 118 | <Coordinate point='0 0.9149 0.0016 0.1612 1.0537 0.0008'/> |
| 119 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 120 | </LineSet> |
| 121 | </Shape> |
| 122 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_trochanterion'/> --> |
| 123 | <Shape> |
| 124 | <LineSet vertexCount='2' containerField='geometry'> |
| 125 | <Coordinate point='0 0.9149 0.0016 0.1677 0.8336 0.0303'/> |
| 126 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 127 | </LineSet> |
| 128 | </Shape> |
| 129 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_asis'/> --> |
| 130 | <Shape> |
| 131 | <LineSet vertexCount='2' containerField='geometry'> |
| 132 | <Coordinate point='0 0.9149 0.0016 -0.0887 1.0021 0.1112'/> |
| 133 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 134 | </LineSet> |
| 135 | </Shape> |
| 136 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_asis'/> --> |
| 137 | <Shape> |
| 138 | <LineSet vertexCount='2' containerField='geometry'> |
| 139 | <Coordinate point='0 0.9149 0.0016 0.0925 0.9983 0.1052'/> |
| 140 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 141 | </LineSet> |
| 142 | </Shape> |
| 143 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='r_psis'/> --> |
| 144 | <Shape> |
| 145 | <LineSet vertexCount='2' containerField='geometry'> |
| 146 | <Coordinate point='0 0.9149 0.0016 -0.0716 1.019 -0.1138'/> |
| 147 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 148 | </LineSet> |
| 149 | </Shape> |
| 150 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='l_psis'/> --> |
| 151 | <Shape> |
| 152 | <LineSet vertexCount='2' containerField='geometry'> |
| 153 | <Coordinate point='0 0.9149 0.0016 0.0774 1.019 -0.1151'/> |
| 154 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 155 | </LineSet> |
| 156 | </Shape> |
| 157 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='sacroiliac'/> to <HAnimSite name='crotch'/> --> |
| 158 | <Shape> |
| 159 | <LineSet vertexCount='2' containerField='geometry'> |
| 160 | <Coordinate point='0 0.9149 0.0016 0.0034 0.8266 0.0257'/> |
| 161 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 162 | </LineSet> |
| 163 | </Shape> |
| 164 |
<!-- HAnimSite
hanim_r_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_iliocristale_pt' name='r_iliocristale_pt' translation='-0.1525 1.0628 0.0035'> |
| 165 | <!-- HAnimSite visualization shape --> |
| 166 | <TouchSensor description='HAnimSite r_iliocristale'/> |
| 167 |
<!-- Shape
HAnimSiteShape is a DEF node that has 90 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90 -->
<Shape DEF='HAnimSiteShape'> |
| 168 | <IndexedFaceSet DEF='DiamondIFS' creaseAngle='0.5' solid='false' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 169 | <Coordinate point='0 0.008 0 -0.008 0 0 0 0 0.008 0.008 0 0 0 0 -0.008 0 -0.008 0'/> |
| 170 | </IndexedFaceSet> |
| 171 | <Appearance> |
| 172 | <Material diffuseColor='1 0 0'/> |
| 173 | </Appearance> |
| 174 | </Shape> |
| 175 | </HAnimSite> |
| 176 |
<!-- HAnimSite
hanim_r_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_trochanterion_pt' name='r_trochanterion_pt' translation='-0.1689 0.8419 0.0352'> |
| 177 | <!-- HAnimSite visualization shape --> |
| 178 | <TouchSensor description='HAnimSite r_trochanterion'/> |
| 179 | <Shape USE='HAnimSiteShape'/> |
| 180 | </HAnimSite> |
| 181 |
<!-- HAnimSite
hanim_l_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_iliocristale_pt' name='l_iliocristale_pt' translation='0.1612 1.0537 0.0008'> |
| 182 | <!-- HAnimSite visualization shape --> |
| 183 | <TouchSensor description='HAnimSite l_iliocristale'/> |
| 184 | <Shape USE='HAnimSiteShape'/> |
| 185 | </HAnimSite> |
| 186 |
<!-- HAnimSite
hanim_l_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_trochanterion_pt' name='l_trochanterion_pt' translation='0.1677 0.8336 0.0303'> |
| 187 | <!-- HAnimSite visualization shape --> |
| 188 | <TouchSensor description='HAnimSite l_trochanterion'/> |
| 189 | <Shape USE='HAnimSiteShape'/> |
| 190 | </HAnimSite> |
| 191 |
<!-- HAnimSite
hanim_r_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_asis_pt' name='r_asis_pt' translation='-0.0887 1.0021 0.1112'> |
| 192 | <!-- HAnimSite visualization shape --> |
| 193 | <TouchSensor description='HAnimSite r_asis'/> |
| 194 | <Shape USE='HAnimSiteShape'/> |
| 195 | </HAnimSite> |
| 196 |
<!-- HAnimSite
hanim_l_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_asis_pt' name='l_asis_pt' translation='0.0925 0.9983 0.1052'> |
| 197 | <!-- HAnimSite visualization shape --> |
| 198 | <TouchSensor description='HAnimSite l_asis'/> |
| 199 | <Shape USE='HAnimSiteShape'/> |
| 200 | </HAnimSite> |
| 201 |
<!-- HAnimSite
hanim_r_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_psis_pt' name='r_psis_pt' translation='-0.0716 1.019 -0.1138'> |
| 202 | <!-- HAnimSite visualization shape --> |
| 203 | <TouchSensor description='HAnimSite r_psis'/> |
| 204 | <Shape USE='HAnimSiteShape'/> |
| 205 | </HAnimSite> |
| 206 |
<!-- HAnimSite
hanim_l_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_psis_pt' name='l_psis_pt' translation='0.0774 1.019 -0.1151'> |
| 207 | <!-- HAnimSite visualization shape --> |
| 208 | <TouchSensor description='HAnimSite l_psis'/> |
| 209 | <Shape USE='HAnimSiteShape'/> |
| 210 | </HAnimSite> |
| 211 |
<!-- HAnimSite
hanim_crotch_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_crotch_pt' name='crotch_pt' translation='0.0034 0.8266 0.0257'> |
| 212 | <!-- HAnimSite visualization shape --> |
| 213 | <TouchSensor description='HAnimSite crotch'/> |
| 214 | <Shape USE='HAnimSiteShape'/> |
| 215 | </HAnimSite> |
| 216 | </HAnimSegment> |
| 217 |
<!-- HAnimJoint
hanim_l_hip is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_hip node: [from Stop_l_hip_RotationInterpolator.value_changed to rotation ] [from Stand_l_hip_RotationInterpolator.value_changed to rotation ] [from Pitches_l_hip_RotationInterpolator.value_changed to rotation ] [from Yaws_l_hip_RotationInterpolator.value_changed to rotation ] [from Rolls_l_hip_RotationInterpolator.value_changed to rotation ] [from Walk_l_hip_RotationInterpolator.value_changed to rotation ] [from Run_l_hip_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_hip_RotationInterpolator.value_changed to rotation ] [from Kick_l_hip_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_hip' center='0.0961 0.9124 -0.0001' name='l_hip'> |
| 218 |
<!-- HAnimSegment
hanim_l_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thigh' name='l_thigh'> |
| 219 | <!-- <HAnimJoint name='l_hip'/> visualization sphere within <HAnimSegment name='l_thigh'/> --> |
| 220 | <TouchSensor description='HAnimJoint l_hip, HAnimSegment l_thigh'/> |
| 221 | <Transform translation='0.0961 0.9124 -0.0001'> |
| 222 | <Shape USE='HAnimJointShape'/> |
| 223 | </Transform> |
| 224 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_hip'/> to <HAnimJoint name='l_knee'/> --> |
| 225 | <Shape> |
| 226 | <LineSet vertexCount='2' containerField='geometry'> |
| 227 | <Coordinate point='0.0961 0.9124 -0.0001 0.104 0.4867 0.0308'/> |
| 228 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 229 | </LineSet> |
| 230 | </Shape> |
| 231 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_knee_crease'/> --> |
| 232 | <Shape> |
| 233 | <LineSet vertexCount='2' containerField='geometry'> |
| 234 | <Coordinate point='0.0961 0.9124 -0.0001 0.0993 0.4881 -0.0309'/> |
| 235 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 236 | </LineSet> |
| 237 | </Shape> |
| 238 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_lateral_epicn'/> --> |
| 239 | <Shape> |
| 240 | <LineSet vertexCount='2' containerField='geometry'> |
| 241 | <Coordinate point='0.0961 0.9124 -0.0001 0.1598 0.4967 0.0297'/> |
| 242 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 243 | </LineSet> |
| 244 | </Shape> |
| 245 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_hip'/> to <HAnimSite name='l_femoral_medial_epicn'/> --> |
| 246 | <Shape> |
| 247 | <LineSet vertexCount='2' containerField='geometry'> |
| 248 | <Coordinate point='0.0961 0.9124 -0.0001 0.0398 0.4946 0.0303'/> |
| 249 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 250 | </LineSet> |
| 251 | </Shape> |
| 252 |
<!-- HAnimSite
hanim_l_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt' translation='0.0993 0.4881 -0.0309'> |
| 253 | <!-- HAnimSite visualization shape --> |
| 254 | <TouchSensor description='HAnimSite l_knee_crease'/> |
| 255 | <Shape USE='HAnimSiteShape'/> |
| 256 | </HAnimSite> |
| 257 |
<!-- HAnimSite
hanim_l_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt' translation='0.1598 0.4967 0.0297'> |
| 258 | <!-- HAnimSite visualization shape --> |
| 259 | <TouchSensor description='HAnimSite l_femoral_lateral_epicn'/> |
| 260 | <Shape USE='HAnimSiteShape'/> |
| 261 | </HAnimSite> |
| 262 |
<!-- HAnimSite
hanim_l_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt' translation='0.0398 0.4946 0.0303'> |
| 263 | <!-- HAnimSite visualization shape --> |
| 264 | <TouchSensor description='HAnimSite l_femoral_medial_epicn'/> |
| 265 | <Shape USE='HAnimSiteShape'/> |
| 266 | </HAnimSite> |
| 267 | </HAnimSegment> |
| 268 |
<!-- HAnimJoint
hanim_l_knee is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_knee node: [from Stop_l_knee_RotationInterpolator.value_changed to rotation ] [from Stand_l_knee_RotationInterpolator.value_changed to rotation ] [from Pitches_l_knee_RotationInterpolator.value_changed to rotation ] [from Yaws_l_knee_RotationInterpolator.value_changed to rotation ] [from Rolls_l_knee_RotationInterpolator.value_changed to rotation ] [from Walk_l_knee_RotationInterpolator.value_changed to rotation ] [from Run_l_knee_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_knee_RotationInterpolator.value_changed to rotation ] [from Kick_l_knee_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_knee' center='0.104 0.4867 0.0308' name='l_knee'> |
| 269 |
<!-- HAnimSegment
hanim_l_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_calf' name='l_calf'> |
| 270 | <!-- <HAnimJoint name='l_knee'/> visualization sphere within <HAnimSegment name='l_calf'/> --> |
| 271 | <TouchSensor description='HAnimJoint l_knee, HAnimSegment l_calf'/> |
| 272 | <Transform translation='0.104 0.4867 0.0308'> |
| 273 | <Shape USE='HAnimJointShape'/> |
| 274 | </Transform> |
| 275 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_knee'/> to <HAnimJoint name='l_ankle'/> --> |
| 276 | <Shape> |
| 277 | <LineSet vertexCount='2' containerField='geometry'> |
| 278 | <Coordinate point='0.104 0.4867 0.0308 0.1101 0.0656 -0.0736'/> |
| 279 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 280 | </LineSet> |
| 281 | </Shape> |
| 282 | </HAnimSegment> |
| 283 |
<!-- HAnimJoint
hanim_l_ankle is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_ankle node: [from Stop_l_ankle_RotationInterpolator.value_changed to rotation ] [from Stand_l_ankle_RotationInterpolator.value_changed to rotation ] [from Pitches_l_ankle_RotationInterpolator.value_changed to rotation ] [from Yaws_l_ankle_RotationInterpolator.value_changed to rotation ] [from Rolls_l_ankle_RotationInterpolator.value_changed to rotation ] [from Walk_l_ankle_RotationInterpolator.value_changed to rotation ] [from Run_l_ankle_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_ankle_RotationInterpolator.value_changed to rotation ] [from Kick_r_ankle_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_ankle' center='0.1101 0.0656 -0.0736' name='l_ankle'> |
| 284 |
<!-- HAnimSegment
hanim_l_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hindfoot' name='l_hindfoot'> |
| 285 | <!-- <HAnimJoint name='l_ankle'/> visualization sphere within <HAnimSegment name='l_hindfoot'/> --> |
| 286 | <TouchSensor description='HAnimJoint l_ankle, HAnimSegment l_hindfoot'/> |
| 287 | <Transform translation='0.1101 0.0656 -0.0736'> |
| 288 | <Shape USE='HAnimJointShape'/> |
| 289 | </Transform> |
| 290 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ankle'/> to <HAnimJoint name='l_subtalar'/> --> |
| 291 | <Shape> |
| 292 | <LineSet vertexCount='2' containerField='geometry'> |
| 293 | <Coordinate point='0.1101 0.0656 -0.0736 0.1086 0.0001 -0.0368'/> |
| 294 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 295 | </LineSet> |
| 296 | </Shape> |
| 297 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_lateral_malleolus'/> --> |
| 298 | <Shape> |
| 299 | <LineSet vertexCount='2' containerField='geometry'> |
| 300 | <Coordinate point='0.1101 0.0656 -0.0736 0.1308 0.0597 -0.1032'/> |
| 301 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 302 | </LineSet> |
| 303 | </Shape> |
| 304 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_medial_malleolus'/> --> |
| 305 | <Shape> |
| 306 | <LineSet vertexCount='2' containerField='geometry'> |
| 307 | <Coordinate point='0.1101 0.0656 -0.0736 0.089 0.0716 -0.0881'/> |
| 308 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 309 | </LineSet> |
| 310 | </Shape> |
| 311 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_sphyrion'/> --> |
| 312 | <Shape> |
| 313 | <LineSet vertexCount='2' containerField='geometry'> |
| 314 | <Coordinate point='0.1101 0.0656 -0.0736 0.089 0.0575 -0.0943'/> |
| 315 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 316 | </LineSet> |
| 317 | </Shape> |
| 318 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ankle'/> to <HAnimSite name='l_calcaneous_post'/> --> |
| 319 | <Shape> |
| 320 | <LineSet vertexCount='2' containerField='geometry'> |
| 321 | <Coordinate point='0.1101 0.0656 -0.0736 0.0974 0.0259 -0.1171'/> |
| 322 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 323 | </LineSet> |
| 324 | </Shape> |
| 325 |
<!-- HAnimSite
hanim_l_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt' translation='0.1308 0.0597 -0.1032'> |
| 326 | <!-- HAnimSite visualization shape --> |
| 327 | <TouchSensor description='HAnimSite l_lateral_malleolus'/> |
| 328 | <Shape USE='HAnimSiteShape'/> |
| 329 | </HAnimSite> |
| 330 |
<!-- HAnimSite
hanim_l_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt' translation='0.089 0.0716 -0.0881'> |
| 331 | <!-- HAnimSite visualization shape --> |
| 332 | <TouchSensor description='HAnimSite l_medial_malleolus'/> |
| 333 | <Shape USE='HAnimSiteShape'/> |
| 334 | </HAnimSite> |
| 335 |
<!-- HAnimSite
hanim_l_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt' translation='0.089 0.0575 -0.0943'> |
| 336 | <!-- HAnimSite visualization shape --> |
| 337 | <TouchSensor description='HAnimSite l_sphyrion'/> |
| 338 | <Shape USE='HAnimSiteShape'/> |
| 339 | </HAnimSite> |
| 340 |
<!-- HAnimSite
hanim_l_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt' translation='0.0974 0.0259 -0.1171'> |
| 341 | <!-- HAnimSite visualization shape --> |
| 342 | <TouchSensor description='HAnimSite l_calcaneous_post'/> |
| 343 | <Shape USE='HAnimSiteShape'/> |
| 344 | </HAnimSite> |
| 345 | </HAnimSegment> |
| 346 |
<!-- HAnimJoint
hanim_l_subtalar is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_subtalar node: [from Stop_l_subtalar_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_subtalar' center='0.1086 0.0001 -0.0368' name='l_subtalar'> |
| 347 |
<!-- HAnimSegment
hanim_l_midproximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_midproximal' name='l_midproximal'> |
| 348 | <!-- <HAnimJoint name='l_subtalar'/> visualization sphere within <HAnimSegment name='l_midproximal'/> --> |
| 349 | <TouchSensor description='HAnimJoint l_subtalar, HAnimSegment l_midproximal'/> |
| 350 | <Transform translation='0.1086 0.0001 -0.0368'> |
| 351 | <Shape USE='HAnimJointShape'/> |
| 352 | </Transform> |
| 353 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_subtalar'/> to <HAnimJoint name='l_midtarsal'/> --> |
| 354 | <Shape> |
| 355 | <LineSet vertexCount='2' containerField='geometry'> |
| 356 | <Coordinate point='0.1086 0.0001 -0.0368 0.1086 0.0001 0.0368'/> |
| 357 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 358 | </LineSet> |
| 359 | </Shape> |
| 360 | </HAnimSegment> |
| 361 |
<!-- HAnimJoint
hanim_l_midtarsal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_midtarsal node: [from Stop_l_midtarsal_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_midtarsal' center='0.1086 0.0001 0.0368' name='l_midtarsal'> |
| 362 |
<!-- HAnimSegment
hanim_l_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middistal' name='l_middistal'> |
| 363 | <!-- <HAnimJoint name='l_midtarsal'/> visualization sphere within <HAnimSegment name='l_middistal'/> --> |
| 364 | <TouchSensor description='HAnimJoint l_midtarsal, HAnimSegment l_middistal'/> |
| 365 | <Transform translation='0.1086 0.0001 0.0368'> |
| 366 | <Shape USE='HAnimJointShape'/> |
| 367 | </Transform> |
| 368 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_midtarsal'/> to <HAnimJoint name='l_metatarsal'/> --> |
| 369 | <Shape> |
| 370 | <LineSet vertexCount='2' containerField='geometry'> |
| 371 | <Coordinate point='0.1086 0.0001 0.0368 0.1086 0 0.0762'/> |
| 372 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 373 | </LineSet> |
| 374 | </Shape> |
| 375 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_midtarsal'/> to <HAnimSite name='l_metatarsal_pha1'/> --> |
| 376 | <Shape> |
| 377 | <LineSet vertexCount='2' containerField='geometry'> |
| 378 | <Coordinate point='0.1086 0.0001 0.0368 0.0816 0.0232 0.0106'/> |
| 379 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 380 | </LineSet> |
| 381 | </Shape> |
| 382 |
<!-- HAnimSite
hanim_l_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt' translation='0.0816 0.0232 0.0106'> |
| 383 | <!-- HAnimSite visualization shape --> |
| 384 | <TouchSensor description='HAnimSite l_metatarsal_pha1'/> |
| 385 | <Shape USE='HAnimSiteShape'/> |
| 386 | </HAnimSite> |
| 387 | </HAnimSegment> |
| 388 |
<!-- HAnimJoint
hanim_l_metatarsal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_metatarsal node: [from Stop_l_metatarsal_RotationInterpolator.value_changed to rotation ] [from Stand_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Pitch_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Yaw_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Roll_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Walk_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Run_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Jump_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Kick_r_metatarsal_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_metatarsal' center='0.1086 0 0.0762' name='l_metatarsal'> |
| 389 |
<!-- HAnimSegment
hanim_l_forefoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_forefoot' name='l_forefoot'> |
| 390 | <!-- <HAnimJoint name='l_metatarsal'/> visualization sphere within <HAnimSegment name='l_forefoot'/> --> |
| 391 | <TouchSensor description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot'/> |
| 392 | <Transform translation='0.1086 0 0.0762'> |
| 393 | <Shape USE='HAnimJointShape'/> |
| 394 | </Transform> |
| 395 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_forefoot_tip'/> --> |
| 396 | <Shape> |
| 397 | <LineSet vertexCount='2' containerField='geometry'> |
| 398 | <Coordinate point='0.1086 0 0.0762 0.1354 0.0016 0.1476'/> |
| 399 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 400 | </LineSet> |
| 401 | </Shape> |
| 402 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_metatarsal_pha5'/> --> |
| 403 | <Shape> |
| 404 | <LineSet vertexCount='2' containerField='geometry'> |
| 405 | <Coordinate point='0.1086 0 0.0762 0.1825 0.007 0.0928'/> |
| 406 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 407 | </LineSet> |
| 408 | </Shape> |
| 409 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_metatarsal'/> to <HAnimSite name='l_digit2'/> --> |
| 410 | <Shape> |
| 411 | <LineSet vertexCount='2' containerField='geometry'> |
| 412 | <Coordinate point='0.1086 0 0.0762 0.1195 0.0079 0.1433'/> |
| 413 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 414 | </LineSet> |
| 415 | </Shape> |
| 416 |
<!-- HAnimSite
hanim_l_forefoot_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_forefoot_tip' name='l_forefoot_tip' translation='0.1354 0.0016 0.1476'> |
| 417 | <!-- HAnimSite visualization shape --> |
| 418 | <TouchSensor description='HAnimSite l_forefoot_tip'/> |
| 419 | <Shape USE='HAnimSiteShape'/> |
| 420 | </HAnimSite> |
| 421 |
<!-- HAnimSite
hanim_l_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt' translation='0.1825 0.007 0.0928'> |
| 422 | <!-- HAnimSite visualization shape --> |
| 423 | <TouchSensor description='HAnimSite l_metatarsal_pha5'/> |
| 424 | <Shape USE='HAnimSiteShape'/> |
| 425 | </HAnimSite> |
| 426 |
<!-- HAnimSite
hanim_l_digit2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_digit2_pt' name='l_digit2_pt' translation='0.1195 0.0079 0.1433'> |
| 427 | <!-- HAnimSite visualization shape --> |
| 428 | <TouchSensor description='HAnimSite l_digit2'/> |
| 429 | <Shape USE='HAnimSiteShape'/> |
| 430 | </HAnimSite> |
| 431 | </HAnimSegment> |
| 432 | </HAnimJoint> |
| 433 | </HAnimJoint> |
| 434 | </HAnimJoint> |
| 435 | </HAnimJoint> |
| 436 | </HAnimJoint> |
| 437 | </HAnimJoint> |
| 438 |
<!-- HAnimJoint
hanim_r_hip is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_hip node: [from Stop_r_hip_RotationInterpolator.value_changed to rotation ] [from Stand_r_hip_RotationInterpolator.value_changed to rotation ] [from Pitches_r_hip_RotationInterpolator.value_changed to rotation ] [from Yaws_r_hip_RotationInterpolator.value_changed to rotation ] [from Rolls_r_hip_RotationInterpolator.value_changed to rotation ] [from Walk_r_hip_RotationInterpolator.value_changed to rotation ] [from Run_r_hip_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_hip_RotationInterpolator.value_changed to rotation ] [from Kick_r_hip_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_hip' center='-0.0961 0.9124 -0.0001' name='r_hip'> |
| 439 |
<!-- HAnimSegment
hanim_r_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thigh' name='r_thigh'> |
| 440 | <!-- <HAnimJoint name='r_hip'/> visualization sphere within <HAnimSegment name='r_thigh'/> --> |
| 441 | <TouchSensor description='HAnimJoint r_hip, HAnimSegment r_thigh'/> |
| 442 | <Transform translation='-0.0961 0.9124 -0.0001'> |
| 443 | <Shape USE='HAnimJointShape'/> |
| 444 | </Transform> |
| 445 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_hip'/> to <HAnimJoint name='r_knee'/> --> |
| 446 | <Shape> |
| 447 | <LineSet vertexCount='2' containerField='geometry'> |
| 448 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.104 0.4867 0.0308'/> |
| 449 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 450 | </LineSet> |
| 451 | </Shape> |
| 452 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_knee_crease'/> --> |
| 453 | <Shape> |
| 454 | <LineSet vertexCount='2' containerField='geometry'> |
| 455 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.0825 0.4932 -0.0326'/> |
| 456 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 457 | </LineSet> |
| 458 | </Shape> |
| 459 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_lateral_epicn'/> --> |
| 460 | <Shape> |
| 461 | <LineSet vertexCount='2' containerField='geometry'> |
| 462 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.1421 0.4992 0.031'/> |
| 463 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 464 | </LineSet> |
| 465 | </Shape> |
| 466 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_hip'/> to <HAnimSite name='r_femoral_medial_epicn'/> --> |
| 467 | <Shape> |
| 468 | <LineSet vertexCount='2' containerField='geometry'> |
| 469 | <Coordinate point='-0.0961 0.9124 -0.0001 -0.0221 0.5014 0.0289'/> |
| 470 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 471 | </LineSet> |
| 472 | </Shape> |
| 473 |
<!-- HAnimSite
hanim_r_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt' translation='-0.0825 0.4932 -0.0326'> |
| 474 | <!-- HAnimSite visualization shape --> |
| 475 | <TouchSensor description='HAnimSite r_knee_crease'/> |
| 476 | <Shape USE='HAnimSiteShape'/> |
| 477 | </HAnimSite> |
| 478 |
<!-- HAnimSite
hanim_r_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt' translation='-0.1421 0.4992 0.031'> |
| 479 | <!-- HAnimSite visualization shape --> |
| 480 | <TouchSensor description='HAnimSite r_femoral_lateral_epicn'/> |
| 481 | <Shape USE='HAnimSiteShape'/> |
| 482 | </HAnimSite> |
| 483 |
<!-- HAnimSite
hanim_r_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt' translation='-0.0221 0.5014 0.0289'> |
| 484 | <!-- HAnimSite visualization shape --> |
| 485 | <TouchSensor description='HAnimSite r_femoral_medial_epicn'/> |
| 486 | <Shape USE='HAnimSiteShape'/> |
| 487 | </HAnimSite> |
| 488 | </HAnimSegment> |
| 489 |
<!-- HAnimJoint
hanim_r_knee is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_knee node: [from Stop_r_knee_RotationInterpolator.value_changed to rotation ] [from Stand_r_knee_RotationInterpolator.value_changed to rotation ] [from Pitches_r_knee_RotationInterpolator.value_changed to rotation ] [from Yaws_r_knee_RotationInterpolator.value_changed to rotation ] [from Rolls_r_knee_RotationInterpolator.value_changed to rotation ] [from Walk_r_knee_RotationInterpolator.value_changed to rotation ] [from Run_r_knee_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_knee_RotationInterpolator.value_changed to rotation ] [from Kick_r_knee_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_knee' center='-0.104 0.4867 0.0308' name='r_knee'> |
| 490 |
<!-- HAnimSegment
hanim_r_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_calf' name='r_calf'> |
| 491 | <!-- <HAnimJoint name='r_knee'/> visualization sphere within <HAnimSegment name='r_calf'/> --> |
| 492 | <TouchSensor description='HAnimJoint r_knee, HAnimSegment r_calf'/> |
| 493 | <Transform translation='-0.104 0.4867 0.0308'> |
| 494 | <Shape USE='HAnimJointShape'/> |
| 495 | </Transform> |
| 496 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_knee'/> to <HAnimJoint name='r_ankle'/> --> |
| 497 | <Shape> |
| 498 | <LineSet vertexCount='2' containerField='geometry'> |
| 499 | <Coordinate point='-0.104 0.4867 0.0308 -0.1101 0.0656 -0.0736'/> |
| 500 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 501 | </LineSet> |
| 502 | </Shape> |
| 503 | </HAnimSegment> |
| 504 |
<!-- HAnimJoint
hanim_r_ankle is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_ankle node: [from Stop_r_ankle_RotationInterpolator.value_changed to rotation ] [from Stand_r_ankle_RotationInterpolator.value_changed to rotation ] [from Pitches_r_ankle_RotationInterpolator.value_changed to rotation ] [from Yaws_r_ankle_RotationInterpolator.value_changed to rotation ] [from Rolls_r_ankle_RotationInterpolator.value_changed to rotation ] [from Walk_r_ankle_RotationInterpolator.value_changed to rotation ] [from Run_r_ankle_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_ankle_RotationInterpolator.value_changed to rotation ] [from Kick_r_ankle_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_ankle' center='-0.1101 0.0656 -0.0736' name='r_ankle'> |
| 505 |
<!-- HAnimSegment
hanim_r_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hindfoot' name='r_hindfoot'> |
| 506 | <!-- <HAnimJoint name='r_ankle'/> visualization sphere within <HAnimSegment name='r_hindfoot'/> --> |
| 507 | <TouchSensor description='HAnimJoint r_ankle, HAnimSegment r_hindfoot'/> |
| 508 | <Transform translation='-0.1101 0.0656 -0.0736'> |
| 509 | <Shape USE='HAnimJointShape'/> |
| 510 | </Transform> |
| 511 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ankle'/> to <HAnimJoint name='r_subtalar'/> --> |
| 512 | <Shape> |
| 513 | <LineSet vertexCount='2' containerField='geometry'> |
| 514 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.1086 0.0001 -0.0368'/> |
| 515 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 516 | </LineSet> |
| 517 | </Shape> |
| 518 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_lateral_malleolus'/> --> |
| 519 | <Shape> |
| 520 | <LineSet vertexCount='2' containerField='geometry'> |
| 521 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.1006 0.0658 -0.1075'/> |
| 522 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 523 | </LineSet> |
| 524 | </Shape> |
| 525 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_medial_malleolus'/> --> |
| 526 | <Shape> |
| 527 | <LineSet vertexCount='2' containerField='geometry'> |
| 528 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0591 0.076 -0.0928'/> |
| 529 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 530 | </LineSet> |
| 531 | </Shape> |
| 532 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_sphyrion'/> --> |
| 533 | <Shape> |
| 534 | <LineSet vertexCount='2' containerField='geometry'> |
| 535 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0603 0.061 -0.1002'/> |
| 536 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 537 | </LineSet> |
| 538 | </Shape> |
| 539 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ankle'/> to <HAnimSite name='r_calcaneous_post'/> --> |
| 540 | <Shape> |
| 541 | <LineSet vertexCount='2' containerField='geometry'> |
| 542 | <Coordinate point='-0.1101 0.0656 -0.0736 -0.0692 0.0297 -0.1221'/> |
| 543 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 544 | </LineSet> |
| 545 | </Shape> |
| 546 |
<!-- HAnimSite
hanim_r_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt' translation='-0.1006 0.0658 -0.1075'> |
| 547 | <!-- HAnimSite visualization shape --> |
| 548 | <TouchSensor description='HAnimSite r_lateral_malleolus'/> |
| 549 | <Shape USE='HAnimSiteShape'/> |
| 550 | </HAnimSite> |
| 551 |
<!-- HAnimSite
hanim_r_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt' translation='-0.0591 0.076 -0.0928'> |
| 552 | <!-- HAnimSite visualization shape --> |
| 553 | <TouchSensor description='HAnimSite r_medial_malleolus'/> |
| 554 | <Shape USE='HAnimSiteShape'/> |
| 555 | </HAnimSite> |
| 556 |
<!-- HAnimSite
hanim_r_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt' translation='-0.0603 0.061 -0.1002'> |
| 557 | <!-- HAnimSite visualization shape --> |
| 558 | <TouchSensor description='HAnimSite r_sphyrion'/> |
| 559 | <Shape USE='HAnimSiteShape'/> |
| 560 | </HAnimSite> |
| 561 |
<!-- HAnimSite
hanim_r_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt' translation='-0.0692 0.0297 -0.1221'> |
| 562 | <!-- HAnimSite visualization shape --> |
| 563 | <TouchSensor description='HAnimSite r_calcaneous_post'/> |
| 564 | <Shape USE='HAnimSiteShape'/> |
| 565 | </HAnimSite> |
| 566 | </HAnimSegment> |
| 567 |
<!-- HAnimJoint
hanim_r_subtalar is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_subtalar node: [from Stop_r_subtalar_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_subtalar' center='-0.1086 0.0001 -0.0368' name='r_subtalar'> |
| 568 |
<!-- HAnimSegment
hanim_r_midproximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_midproximal' name='r_midproximal'> |
| 569 | <!-- <HAnimJoint name='r_subtalar'/> visualization sphere within <HAnimSegment name='r_midproximal'/> --> |
| 570 | <TouchSensor description='HAnimJoint r_subtalar, HAnimSegment r_midproximal'/> |
| 571 | <Transform translation='-0.1086 0.0001 -0.0368'> |
| 572 | <Shape USE='HAnimJointShape'/> |
| 573 | </Transform> |
| 574 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_subtalar'/> to <HAnimJoint name='r_midtarsal'/> --> |
| 575 | <Shape> |
| 576 | <LineSet vertexCount='2' containerField='geometry'> |
| 577 | <Coordinate point='-0.1086 0.0001 -0.0368 -0.1086 0.0001 0.0368'/> |
| 578 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 579 | </LineSet> |
| 580 | </Shape> |
| 581 | </HAnimSegment> |
| 582 |
<!-- HAnimJoint
hanim_r_midtarsal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_midtarsal node: [from Stop_r_midtarsal_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_midtarsal' center='-0.1086 0.0001 0.0368' name='r_midtarsal'> |
| 583 |
<!-- HAnimSegment
hanim_r_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middistal' name='r_middistal'> |
| 584 | <!-- <HAnimJoint name='r_midtarsal'/> visualization sphere within <HAnimSegment name='r_middistal'/> --> |
| 585 | <TouchSensor description='HAnimJoint r_midtarsal, HAnimSegment r_middistal'/> |
| 586 | <Transform translation='-0.1086 0.0001 0.0368'> |
| 587 | <Shape USE='HAnimJointShape'/> |
| 588 | </Transform> |
| 589 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_midtarsal'/> to <HAnimJoint name='r_metatarsal'/> --> |
| 590 | <Shape> |
| 591 | <LineSet vertexCount='2' containerField='geometry'> |
| 592 | <Coordinate point='-0.1086 0.0001 0.0368 -0.1086 0 0.0762'/> |
| 593 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 594 | </LineSet> |
| 595 | </Shape> |
| 596 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_midtarsal'/> to <HAnimSite name='r_metatarsal_pha1'/> --> |
| 597 | <Shape> |
| 598 | <LineSet vertexCount='2' containerField='geometry'> |
| 599 | <Coordinate point='-0.1086 0.0001 0.0368 -0.0521 0.026 0.0127'/> |
| 600 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 601 | </LineSet> |
| 602 | </Shape> |
| 603 |
<!-- HAnimSite
hanim_r_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt' translation='-0.0521 0.026 0.0127'> |
| 604 | <!-- HAnimSite visualization shape --> |
| 605 | <TouchSensor description='HAnimSite r_metatarsal_pha1'/> |
| 606 | <Shape USE='HAnimSiteShape'/> |
| 607 | </HAnimSite> |
| 608 | </HAnimSegment> |
| 609 |
<!-- HAnimJoint
hanim_r_metatarsal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_metatarsal node: [from Stop_r_metatarsal_RotationInterpolator.value_changed to rotation ] [from Stand_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Pitch_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Yaw_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Roll_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Walk_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Run_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Jump_r_metatarsal_PitchInterpolator.value_changed to rotation ] [from Kick_r_metatarsal_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_metatarsal' center='-0.1086 0 0.0762' name='r_metatarsal'> |
| 610 |
<!-- HAnimSegment
hanim_r_forefoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_forefoot' name='r_forefoot'> |
| 611 | <!-- <HAnimJoint name='r_metatarsal'/> visualization sphere within <HAnimSegment name='r_forefoot'/> --> |
| 612 | <TouchSensor description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot'/> |
| 613 | <Transform translation='-0.1086 0 0.0762'> |
| 614 | <Shape USE='HAnimJointShape'/> |
| 615 | </Transform> |
| 616 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_forefoot_tip'/> --> |
| 617 | <Shape> |
| 618 | <LineSet vertexCount='2' containerField='geometry'> |
| 619 | <Coordinate point='-0.1086 0 0.0762 -0.1043 0.0227 0.145'/> |
| 620 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 621 | </LineSet> |
| 622 | </Shape> |
| 623 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_metatarsal_pha5'/> --> |
| 624 | <Shape> |
| 625 | <LineSet vertexCount='2' containerField='geometry'> |
| 626 | <Coordinate point='-0.1086 0 0.0762 -0.1523 0.0166 0.0895'/> |
| 627 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 628 | </LineSet> |
| 629 | </Shape> |
| 630 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_metatarsal'/> to <HAnimSite name='r_digit2'/> --> |
| 631 | <Shape> |
| 632 | <LineSet vertexCount='2' containerField='geometry'> |
| 633 | <Coordinate point='-0.1086 0 0.0762 -0.0883 0.0134 0.1383'/> |
| 634 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 635 | </LineSet> |
| 636 | </Shape> |
| 637 |
<!-- HAnimSite
hanim_r_forefoot_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_forefoot_tip' name='r_forefoot_tip' translation='-0.1043 0.0227 0.145'> |
| 638 | <!-- HAnimSite visualization shape --> |
| 639 | <TouchSensor description='HAnimSite r_forefoot_tip'/> |
| 640 | <Shape USE='HAnimSiteShape'/> |
| 641 | </HAnimSite> |
| 642 |
<!-- HAnimSite
hanim_r_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt' translation='-0.1523 0.0166 0.0895'> |
| 643 | <!-- HAnimSite visualization shape --> |
| 644 | <TouchSensor description='HAnimSite r_metatarsal_pha5'/> |
| 645 | <Shape USE='HAnimSiteShape'/> |
| 646 | </HAnimSite> |
| 647 |
<!-- HAnimSite
hanim_r_digit2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_digit2_pt' name='r_digit2_pt' translation='-0.0883 0.0134 0.1383'> |
| 648 | <!-- HAnimSite visualization shape --> |
| 649 | <TouchSensor description='HAnimSite r_digit2'/> |
| 650 | <Shape USE='HAnimSiteShape'/> |
| 651 | </HAnimSite> |
| 652 | </HAnimSegment> |
| 653 | </HAnimJoint> |
| 654 | </HAnimJoint> |
| 655 | </HAnimJoint> |
| 656 | </HAnimJoint> |
| 657 | </HAnimJoint> |
| 658 | </HAnimJoint> |
| 659 | </HAnimJoint> |
| 660 |
<!-- HAnimJoint
hanim_vl5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vl5 node: [from Stop_vl5_RotationInterpolator.value_changed to rotation ] [from Stand_vl5_YawInterpolator.value_changed to rotation ] [from Pitch_vl5_YawInterpolator.value_changed to rotation ] [from Yaw_vl5_YawInterpolator.value_changed to rotation ] [from Roll_vl5_YawInterpolator.value_changed to rotation ] [from Walk_vl5_YawInterpolator.value_changed to rotation ] [from Run_vl5_YawInterpolator.value_changed to rotation ] [from Jump_vl5_YawInterpolator.value_changed to rotation ] [from Kick_vl5_YawInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vl5' center='0.0028 1.0568 -0.0776' name='vl5'> |
| 661 | |
| 662 | <!-- <HAnimJoint name='vl5'/> visualization sphere within <HAnimSegment name='l5'/> --> |
| 663 | <TouchSensor description='HAnimJoint vl5, HAnimSegment l5'/> |
| 664 | <Transform translation='0.0028 1.0568 -0.0776'> |
| 665 | <Shape USE='HAnimJointShape'/> |
| 666 | </Transform> |
| 667 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl5'/> to <HAnimJoint name='vl4'/> --> |
| 668 | <Shape> |
| 669 | <LineSet vertexCount='2' containerField='geometry'> |
| 670 | <Coordinate point='0.0028 1.0568 -0.0776 0.0035 1.0925 -0.0787'/> |
| 671 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 672 | </LineSet> |
| 673 | </Shape> |
| 674 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='waist_preferred_post'/> --> |
| 675 | <Shape> |
| 676 | <LineSet vertexCount='2' containerField='geometry'> |
| 677 | <Coordinate point='0.0028 1.0568 -0.0776 0 1.0915 -0.1091'/> |
| 678 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 679 | </LineSet> |
| 680 | </Shape> |
| 681 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl5'/> to <HAnimSite name='navel'/> --> |
| 682 | <Shape> |
| 683 | <LineSet vertexCount='2' containerField='geometry'> |
| 684 | <Coordinate point='0.0028 1.0568 -0.0776 0.0069 1.0966 0.1017'/> |
| 685 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 686 | </LineSet> |
| 687 | </Shape> |
| 688 |
<!-- HAnimSite
hanim_waist_preferred_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_waist_preferred_post_pt' name='waist_preferred_post_pt' translation='0 1.0915 -0.1091'> |
| 689 | <!-- HAnimSite visualization shape --> |
| 690 | <TouchSensor description='HAnimSite waist_preferred_post'/> |
| 691 | <Shape USE='HAnimSiteShape'/> |
| 692 | </HAnimSite> |
| 693 |
<!-- HAnimSite
hanim_navel_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_navel_pt' name='navel_pt' translation='0.0069 1.0966 0.1017'> |
| 694 | <!-- HAnimSite visualization shape --> |
| 695 | <TouchSensor description='HAnimSite navel'/> |
| 696 | <Shape USE='HAnimSiteShape'/> |
| 697 | </HAnimSite> |
| 698 | </HAnimSegment> |
| 699 |
<!-- HAnimJoint
hanim_vl4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vl4 node: [from Stop_vl4_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vl4' center='0.0035 1.0925 -0.0787' name='vl4'> |
| 700 | |
| 701 | <!-- <HAnimJoint name='vl4'/> visualization sphere within <HAnimSegment name='l4'/> --> |
| 702 | <TouchSensor description='HAnimJoint vl4, HAnimSegment l4'/> |
| 703 | <Transform translation='0.0035 1.0925 -0.0787'> |
| 704 | <Shape USE='HAnimJointShape'/> |
| 705 | </Transform> |
| 706 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl4'/> to <HAnimJoint name='vl3'/> --> |
| 707 | <Shape> |
| 708 | <LineSet vertexCount='2' containerField='geometry'> |
| 709 | <Coordinate point='0.0035 1.0925 -0.0787 0.0041 1.1276 -0.0796'/> |
| 710 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 711 | </LineSet> |
| 712 | </Shape> |
| 713 | </HAnimSegment> |
| 714 |
<!-- HAnimJoint
hanim_vl3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vl3 node: [from Stop_vl3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vl3' center='0.0041 1.1276 -0.0796' name='vl3'> |
| 715 | |
| 716 | <!-- <HAnimJoint name='vl3'/> visualization sphere within <HAnimSegment name='l3'/> --> |
| 717 | <TouchSensor description='HAnimJoint vl3, HAnimSegment l3'/> |
| 718 | <Transform translation='0.0041 1.1276 -0.0796'> |
| 719 | <Shape USE='HAnimJointShape'/> |
| 720 | </Transform> |
| 721 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl3'/> to <HAnimJoint name='vl2'/> --> |
| 722 | <Shape> |
| 723 | <LineSet vertexCount='2' containerField='geometry'> |
| 724 | <Coordinate point='0.0041 1.1276 -0.0796 0.0045 1.1546 -0.08'/> |
| 725 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 726 | </LineSet> |
| 727 | </Shape> |
| 728 | </HAnimSegment> |
| 729 |
<!-- HAnimJoint
hanim_vl2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vl2 node: [from Stop_vl2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vl2' center='0.0045 1.1546 -0.08' name='vl2'> |
| 730 | |
| 731 | <!-- <HAnimJoint name='vl2'/> visualization sphere within <HAnimSegment name='l2'/> --> |
| 732 | <TouchSensor description='HAnimJoint vl2, HAnimSegment l2'/> |
| 733 | <Transform translation='0.0045 1.1546 -0.08'> |
| 734 | <Shape USE='HAnimJointShape'/> |
| 735 | </Transform> |
| 736 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl2'/> to <HAnimJoint name='vl1'/> --> |
| 737 | <Shape> |
| 738 | <LineSet vertexCount='2' containerField='geometry'> |
| 739 | <Coordinate point='0.0045 1.1546 -0.08 0.0048 1.1912 -0.0805'/> |
| 740 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 741 | </LineSet> |
| 742 | </Shape> |
| 743 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='r_rib10'/> --> |
| 744 | <Shape> |
| 745 | <LineSet vertexCount='2' containerField='geometry'> |
| 746 | <Coordinate point='0.0045 1.1546 -0.08 -0.0711 1.1941 0.1016'/> |
| 747 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 748 | </LineSet> |
| 749 | </Shape> |
| 750 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='l_rib10'/> --> |
| 751 | <Shape> |
| 752 | <LineSet vertexCount='2' containerField='geometry'> |
| 753 | <Coordinate point='0.0045 1.1546 -0.08 0.0871 1.1925 0.0992'/> |
| 754 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 755 | </LineSet> |
| 756 | </Shape> |
| 757 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vl2'/> to <HAnimSite name='rib10_midspine'/> --> |
| 758 | <Shape> |
| 759 | <LineSet vertexCount='2' containerField='geometry'> |
| 760 | <Coordinate point='0.0045 1.1546 -0.08 0.0049 1.1908 -0.1113'/> |
| 761 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 762 | </LineSet> |
| 763 | </Shape> |
| 764 |
<!-- HAnimSite
hanim_r_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_rib10_pt' name='r_rib10_pt' translation='-0.0711 1.1941 0.1016'> |
| 765 | <!-- HAnimSite visualization shape --> |
| 766 | <TouchSensor description='HAnimSite r_rib10'/> |
| 767 | <Shape USE='HAnimSiteShape'/> |
| 768 | </HAnimSite> |
| 769 |
<!-- HAnimSite
hanim_l_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_rib10_pt' name='l_rib10_pt' translation='0.0871 1.1925 0.0992'> |
| 770 | <!-- HAnimSite visualization shape --> |
| 771 | <TouchSensor description='HAnimSite l_rib10'/> |
| 772 | <Shape USE='HAnimSiteShape'/> |
| 773 | </HAnimSite> |
| 774 |
<!-- HAnimSite
hanim_rib10_midspine_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_rib10_midspine_pt' name='rib10_midspine_pt' translation='0.0049 1.1908 -0.1113'> |
| 775 | <!-- HAnimSite visualization shape --> |
| 776 | <TouchSensor description='HAnimSite rib10_midspine'/> |
| 777 | <Shape USE='HAnimSiteShape'/> |
| 778 | </HAnimSite> |
| 779 | </HAnimSegment> |
| 780 |
<!-- HAnimJoint
hanim_vl1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vl1 node: [from Stop_vl1_RotationInterpolator.value_changed to rotation ] [from Stand_upper_body_RotationInterpolator.value_changed to rotation ] [from Pitches_upper_body_RotationInterpolator.value_changed to rotation ] [from Yaws_upper_body_RotationInterpolator.value_changed to rotation ] [from Rolls_upper_body_RotationInterpolator.value_changed to rotation ] [from Walk_upper_body_RotationInterpolator.value_changed to rotation ] [from Run_upper_body_RotationInterpolator_Run.value_changed to rotation ] [from Jump_upper_body_RotationInterpolator.value_changed to rotation ] [from Kick_upper_body_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vl1' center='0.0048 1.1912 -0.0805' name='vl1'> |
| 781 | |
| 782 | <!-- <HAnimJoint name='vl1'/> visualization sphere within <HAnimSegment name='l1'/> --> |
| 783 | <TouchSensor description='HAnimJoint vl1, HAnimSegment l1'/> |
| 784 | <Transform translation='0.0048 1.1912 -0.0805'> |
| 785 | <Shape USE='HAnimJointShape'/> |
| 786 | </Transform> |
| 787 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vl1'/> to <HAnimJoint name='vt12'/> --> |
| 788 | <Shape> |
| 789 | <LineSet vertexCount='2' containerField='geometry'> |
| 790 | <Coordinate point='0.0048 1.1912 -0.0805 0.0051 1.2278 -0.0808'/> |
| 791 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 792 | </LineSet> |
| 793 | </Shape> |
| 794 | </HAnimSegment> |
| 795 |
<!-- HAnimJoint
hanim_vt12 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt12 node: [from Stop_vt12_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt12' center='0.0051 1.2278 -0.0808' name='vt12'> |
| 796 | |
| 797 | <!-- <HAnimJoint name='vt12'/> visualization sphere within <HAnimSegment name='t12'/> --> |
| 798 | <TouchSensor description='HAnimJoint vt12, HAnimSegment t12'/> |
| 799 | <Transform translation='0.0051 1.2278 -0.0808'> |
| 800 | <Shape USE='HAnimJointShape'/> |
| 801 | </Transform> |
| 802 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt12'/> to <HAnimJoint name='vt11'/> --> |
| 803 | <Shape> |
| 804 | <LineSet vertexCount='2' containerField='geometry'> |
| 805 | <Coordinate point='0.0051 1.2278 -0.0808 0.0053 1.2679 -0.081'/> |
| 806 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 807 | </LineSet> |
| 808 | </Shape> |
| 809 | </HAnimSegment> |
| 810 |
<!-- HAnimJoint
hanim_vt11 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt11 node: [from Stop_vt11_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt11' center='0.0053 1.2679 -0.081' name='vt11'> |
| 811 | |
| 812 | <!-- <HAnimJoint name='vt11'/> visualization sphere within <HAnimSegment name='t11'/> --> |
| 813 | <TouchSensor description='HAnimJoint vt11, HAnimSegment t11'/> |
| 814 | <Transform translation='0.0053 1.2679 -0.081'> |
| 815 | <Shape USE='HAnimJointShape'/> |
| 816 | </Transform> |
| 817 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt11'/> to <HAnimJoint name='vt10'/> --> |
| 818 | <Shape> |
| 819 | <LineSet vertexCount='2' containerField='geometry'> |
| 820 | <Coordinate point='0.0053 1.2679 -0.081 0.0056 1.2848 -0.0822'/> |
| 821 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 822 | </LineSet> |
| 823 | </Shape> |
| 824 | </HAnimSegment> |
| 825 |
<!-- HAnimJoint
hanim_vt10 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt10 node: [from Stop_vt10_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt10' center='0.0056 1.2848 -0.0822' name='vt10'> |
| 826 | |
| 827 | <!-- <HAnimJoint name='vt10'/> visualization sphere within <HAnimSegment name='t10'/> --> |
| 828 | <TouchSensor description='HAnimJoint vt10, HAnimSegment t10'/> |
| 829 | <Transform translation='0.0056 1.2848 -0.0822'> |
| 830 | <Shape USE='HAnimJointShape'/> |
| 831 | </Transform> |
| 832 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt10'/> to <HAnimJoint name='vt9'/> --> |
| 833 | <Shape> |
| 834 | <LineSet vertexCount='2' containerField='geometry'> |
| 835 | <Coordinate point='0.0056 1.2848 -0.0822 0.0057 1.3126 -0.0838'/> |
| 836 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 837 | </LineSet> |
| 838 | </Shape> |
| 839 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt10'/> to <HAnimSite name='substernale'/> --> |
| 840 | <Shape> |
| 841 | <LineSet vertexCount='2' containerField='geometry'> |
| 842 | <Coordinate point='0.0056 1.2848 -0.0822 0.0085 1.2995 0.1147'/> |
| 843 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 844 | </LineSet> |
| 845 | </Shape> |
| 846 |
<!-- HAnimSite
hanim_substernale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_substernale_pt' name='substernale_pt' translation='0.0085 1.2995 0.1147'> |
| 847 | <!-- HAnimSite visualization shape --> |
| 848 | <TouchSensor description='HAnimSite substernale'/> |
| 849 | <Shape USE='HAnimSiteShape'/> |
| 850 | </HAnimSite> |
| 851 | </HAnimSegment> |
| 852 |
<!-- HAnimJoint
hanim_vt9 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt9 node: [from Stop_vt9_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt9' center='0.0057 1.3126 -0.0838' name='vt9'> |
| 853 | |
| 854 | <!-- <HAnimJoint name='vt9'/> visualization sphere within <HAnimSegment name='t9'/> --> |
| 855 | <TouchSensor description='HAnimJoint vt9, HAnimSegment t9'/> |
| 856 | <Transform translation='0.0057 1.3126 -0.0838'> |
| 857 | <Shape USE='HAnimJointShape'/> |
| 858 | </Transform> |
| 859 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt9'/> to <HAnimJoint name='vt8'/> --> |
| 860 | <Shape> |
| 861 | <LineSet vertexCount='2' containerField='geometry'> |
| 862 | <Coordinate point='0.0057 1.3126 -0.0838 0.0057 1.3382 -0.0845'/> |
| 863 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 864 | </LineSet> |
| 865 | </Shape> |
| 866 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='r_thelion'/> --> |
| 867 | <Shape> |
| 868 | <LineSet vertexCount='2' containerField='geometry'> |
| 869 | <Coordinate point='0.0057 1.3126 -0.0838 -0.0736 1.3385 0.1217'/> |
| 870 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 871 | </LineSet> |
| 872 | </Shape> |
| 873 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt9'/> to <HAnimSite name='l_thelion'/> --> |
| 874 | <Shape> |
| 875 | <LineSet vertexCount='2' containerField='geometry'> |
| 876 | <Coordinate point='0.0057 1.3126 -0.0838 0.0918 1.3382 0.1192'/> |
| 877 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 878 | </LineSet> |
| 879 | </Shape> |
| 880 |
<!-- HAnimSite
hanim_r_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_thelion_pt' name='r_thelion_pt' translation='-0.0736 1.3385 0.1217'> |
| 881 | <!-- HAnimSite visualization shape --> |
| 882 | <TouchSensor description='HAnimSite r_thelion'/> |
| 883 | <Shape USE='HAnimSiteShape'/> |
| 884 | </HAnimSite> |
| 885 |
<!-- HAnimSite
hanim_l_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_thelion_pt' name='l_thelion_pt' translation='0.0918 1.3382 0.1192'> |
| 886 | <!-- HAnimSite visualization shape --> |
| 887 | <TouchSensor description='HAnimSite l_thelion'/> |
| 888 | <Shape USE='HAnimSiteShape'/> |
| 889 | </HAnimSite> |
| 890 | </HAnimSegment> |
| 891 |
<!-- HAnimJoint
hanim_vt8 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt8 node: [from Stop_vt8_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt8' center='0.0057 1.3382 -0.0845' name='vt8'> |
| 892 | |
| 893 | <!-- <HAnimJoint name='vt8'/> visualization sphere within <HAnimSegment name='t8'/> --> |
| 894 | <TouchSensor description='HAnimJoint vt8, HAnimSegment t8'/> |
| 895 | <Transform translation='0.0057 1.3382 -0.0845'> |
| 896 | <Shape USE='HAnimJointShape'/> |
| 897 | </Transform> |
| 898 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt8'/> to <HAnimJoint name='vt7'/> --> |
| 899 | <Shape> |
| 900 | <LineSet vertexCount='2' containerField='geometry'> |
| 901 | <Coordinate point='0.0057 1.3382 -0.0845 0.0058 1.3625 -0.0833'/> |
| 902 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 903 | </LineSet> |
| 904 | </Shape> |
| 905 | </HAnimSegment> |
| 906 |
<!-- HAnimJoint
hanim_vt7 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt7 node: [from Stop_vt7_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt7' center='0.0058 1.3625 -0.0833' name='vt7'> |
| 907 | |
| 908 | <!-- <HAnimJoint name='vt7'/> visualization sphere within <HAnimSegment name='t7'/> --> |
| 909 | <TouchSensor description='HAnimJoint vt7, HAnimSegment t7'/> |
| 910 | <Transform translation='0.0058 1.3625 -0.0833'> |
| 911 | <Shape USE='HAnimJointShape'/> |
| 912 | </Transform> |
| 913 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt7'/> to <HAnimJoint name='vt6'/> --> |
| 914 | <Shape> |
| 915 | <LineSet vertexCount='2' containerField='geometry'> |
| 916 | <Coordinate point='0.0058 1.3625 -0.0833 0.0059 1.3866 -0.08'/> |
| 917 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 918 | </LineSet> |
| 919 | </Shape> |
| 920 | </HAnimSegment> |
| 921 |
<!-- HAnimJoint
hanim_vt6 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt6 node: [from Stop_vt6_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt6' center='0.0059 1.3866 -0.08' name='vt6'> |
| 922 | |
| 923 | <!-- <HAnimJoint name='vt6'/> visualization sphere within <HAnimSegment name='t6'/> --> |
| 924 | <TouchSensor description='HAnimJoint vt6, HAnimSegment t6'/> |
| 925 | <Transform translation='0.0059 1.3866 -0.08'> |
| 926 | <Shape USE='HAnimJointShape'/> |
| 927 | </Transform> |
| 928 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt6'/> to <HAnimJoint name='vt5'/> --> |
| 929 | <Shape> |
| 930 | <LineSet vertexCount='2' containerField='geometry'> |
| 931 | <Coordinate point='0.0059 1.3866 -0.08 0.006 1.4102 -0.0745'/> |
| 932 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 933 | </LineSet> |
| 934 | </Shape> |
| 935 | </HAnimSegment> |
| 936 |
<!-- HAnimJoint
hanim_vt5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt5 node: [from Stop_vt5_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt5' center='0.006 1.4102 -0.0745' name='vt5'> |
| 937 | |
| 938 | <!-- <HAnimJoint name='vt5'/> visualization sphere within <HAnimSegment name='t5'/> --> |
| 939 | <TouchSensor description='HAnimJoint vt5, HAnimSegment t5'/> |
| 940 | <Transform translation='0.006 1.4102 -0.0745'> |
| 941 | <Shape USE='HAnimJointShape'/> |
| 942 | </Transform> |
| 943 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt5'/> to <HAnimJoint name='vt4'/> --> |
| 944 | <Shape> |
| 945 | <LineSet vertexCount='2' containerField='geometry'> |
| 946 | <Coordinate point='0.006 1.4102 -0.0745 0.0061 1.432 -0.0675'/> |
| 947 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 948 | </LineSet> |
| 949 | </Shape> |
| 950 | </HAnimSegment> |
| 951 |
<!-- HAnimJoint
hanim_vt4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt4 node: [from Stop_vt4_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt4' center='0.0061 1.432 -0.0675' name='vt4'> |
| 952 | |
| 953 | <!-- <HAnimJoint name='vt4'/> visualization sphere within <HAnimSegment name='t4'/> --> |
| 954 | <TouchSensor description='HAnimJoint vt4, HAnimSegment t4'/> |
| 955 | <Transform translation='0.0061 1.432 -0.0675'> |
| 956 | <Shape USE='HAnimJointShape'/> |
| 957 | </Transform> |
| 958 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt4'/> to <HAnimJoint name='vt3'/> --> |
| 959 | <Shape> |
| 960 | <LineSet vertexCount='2' containerField='geometry'> |
| 961 | <Coordinate point='0.0061 1.432 -0.0675 0.0062 1.4583 -0.057'/> |
| 962 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 963 | </LineSet> |
| 964 | </Shape> |
| 965 | </HAnimSegment> |
| 966 |
<!-- HAnimJoint
hanim_vt3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt3 node: [from Stop_vt3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt3' center='0.0062 1.4583 -0.057' name='vt3'> |
| 967 | |
| 968 | <!-- <HAnimJoint name='vt3'/> visualization sphere within <HAnimSegment name='t3'/> --> |
| 969 | <TouchSensor description='HAnimJoint vt3, HAnimSegment t3'/> |
| 970 | <Transform translation='0.0062 1.4583 -0.057'> |
| 971 | <Shape USE='HAnimJointShape'/> |
| 972 | </Transform> |
| 973 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt3'/> to <HAnimJoint name='vt2'/> --> |
| 974 | <Shape> |
| 975 | <LineSet vertexCount='2' containerField='geometry'> |
| 976 | <Coordinate point='0.0062 1.4583 -0.057 0.0063 1.4761 -0.0484'/> |
| 977 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 978 | </LineSet> |
| 979 | </Shape> |
| 980 | </HAnimSegment> |
| 981 |
<!-- HAnimJoint
hanim_vt2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt2 node: [from Stop_vt2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt2' center='0.0063 1.4761 -0.0484' name='vt2'> |
| 982 | |
| 983 | <!-- <HAnimJoint name='vt2'/> visualization sphere within <HAnimSegment name='t2'/> --> |
| 984 | <TouchSensor description='HAnimJoint vt2, HAnimSegment t2'/> |
| 985 | <Transform translation='0.0063 1.4761 -0.0484'> |
| 986 | <Shape USE='HAnimJointShape'/> |
| 987 | </Transform> |
| 988 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt2'/> to <HAnimJoint name='vt1'/> --> |
| 989 | <Shape> |
| 990 | <LineSet vertexCount='2' containerField='geometry'> |
| 991 | <Coordinate point='0.0063 1.4761 -0.0484 0.0065 1.4951 -0.0387'/> |
| 992 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 993 | </LineSet> |
| 994 | </Shape> |
| 995 | </HAnimSegment> |
| 996 |
<!-- HAnimJoint
hanim_vt1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vt1 node: [from Stop_vt1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vt1' center='0.0065 1.4951 -0.0387' name='vt1'> |
| 997 | |
| 998 | <!-- <HAnimJoint name='vt1'/> visualization sphere within <HAnimSegment name='t1'/> --> |
| 999 | <TouchSensor description='HAnimJoint vt1, HAnimSegment t1'/> |
| 1000 | <Transform translation='0.0065 1.4951 -0.0387'> |
| 1001 | <Shape USE='HAnimJointShape'/> |
| 1002 | </Transform> |
| 1003 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='vc7'/> --> |
| 1004 | <Shape> |
| 1005 | <LineSet vertexCount='2' containerField='geometry'> |
| 1006 | <Coordinate point='0.0065 1.4951 -0.0387 0.0066 1.5132 -0.0301'/> |
| 1007 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1008 | </LineSet> |
| 1009 | </Shape> |
| 1010 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='l_sternoclavicular'/> --> |
| 1011 | <Shape> |
| 1012 | <LineSet vertexCount='2' containerField='geometry'> |
| 1013 | <Coordinate point='0.0065 1.4951 -0.0387 0.082 1.4488 -0.0353'/> |
| 1014 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1015 | </LineSet> |
| 1016 | </Shape> |
| 1017 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vt1'/> to <HAnimJoint name='r_sternoclavicular'/> --> |
| 1018 | <Shape> |
| 1019 | <LineSet vertexCount='2' containerField='geometry'> |
| 1020 | <Coordinate point='0.0065 1.4951 -0.0387 -0.082 1.4488 -0.0353'/> |
| 1021 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1022 | </LineSet> |
| 1023 | </Shape> |
| 1024 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='suprasternale'/> --> |
| 1025 | <Shape> |
| 1026 | <LineSet vertexCount='2' containerField='geometry'> |
| 1027 | <Coordinate point='0.0065 1.4951 -0.0387 0.0084 1.4714 0.0551'/> |
| 1028 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1029 | </LineSet> |
| 1030 | </Shape> |
| 1031 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vt1'/> to <HAnimSite name='cervicale'/> --> |
| 1032 | <Shape> |
| 1033 | <LineSet vertexCount='2' containerField='geometry'> |
| 1034 | <Coordinate point='0.0065 1.4951 -0.0387 0.0064 1.52 -0.0815'/> |
| 1035 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1036 | </LineSet> |
| 1037 | </Shape> |
| 1038 |
<!-- HAnimSite
hanim_suprasternale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_suprasternale_pt' name='suprasternale_pt' translation='0.0084 1.4714 0.0551'> |
| 1039 | <!-- HAnimSite visualization shape --> |
| 1040 | <TouchSensor description='HAnimSite suprasternale'/> |
| 1041 | <Shape USE='HAnimSiteShape'/> |
| 1042 | </HAnimSite> |
| 1043 |
<!-- HAnimSite
hanim_cervicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_cervicale_pt' name='cervicale_pt' translation='0.0064 1.52 -0.0815'> |
| 1044 | <!-- HAnimSite visualization shape --> |
| 1045 | <TouchSensor description='HAnimSite cervicale'/> |
| 1046 | <Shape USE='HAnimSiteShape'/> |
| 1047 | </HAnimSite> |
| 1048 | </HAnimSegment> |
| 1049 |
<!-- HAnimJoint
hanim_vc7 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc7 node: [from Stop_vc7_RotationInterpolator.value_changed to rotation ] [from Stand_neck_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc7' center='0.0066 1.5132 -0.0301' name='vc7'> |
| 1050 | |
| 1051 | <!-- <HAnimJoint name='vc7'/> visualization sphere within <HAnimSegment name='c7'/> --> |
| 1052 | <TouchSensor description='HAnimJoint vc7, HAnimSegment c7'/> |
| 1053 | <Transform translation='0.0066 1.5132 -0.0301'> |
| 1054 | <Shape USE='HAnimJointShape'/> |
| 1055 | </Transform> |
| 1056 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc7'/> to <HAnimJoint name='vc6'/> --> |
| 1057 | <Shape> |
| 1058 | <LineSet vertexCount='2' containerField='geometry'> |
| 1059 | <Coordinate point='0.0066 1.5132 -0.0301 0.0066 1.5357 -0.0143'/> |
| 1060 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1061 | </LineSet> |
| 1062 | </Shape> |
| 1063 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='r_neck_base'/> --> |
| 1064 | <Shape> |
| 1065 | <LineSet vertexCount='2' containerField='geometry'> |
| 1066 | <Coordinate point='0.0066 1.5132 -0.0301 -0.0419 1.5149 -0.022'/> |
| 1067 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1068 | </LineSet> |
| 1069 | </Shape> |
| 1070 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='vc7'/> to <HAnimSite name='l_neck_base'/> --> |
| 1071 | <Shape> |
| 1072 | <LineSet vertexCount='2' containerField='geometry'> |
| 1073 | <Coordinate point='0.0066 1.5132 -0.0301 0.0646 1.5141 -0.038'/> |
| 1074 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1075 | </LineSet> |
| 1076 | </Shape> |
| 1077 |
<!-- HAnimSite
hanim_r_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_neck_base_pt' name='r_neck_base_pt' translation='-0.0419 1.5149 -0.022'> |
| 1078 | <!-- HAnimSite visualization shape --> |
| 1079 | <TouchSensor description='HAnimSite r_neck_base'/> |
| 1080 | <Shape USE='HAnimSiteShape'/> |
| 1081 | </HAnimSite> |
| 1082 |
<!-- HAnimSite
hanim_l_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_neck_base_pt' name='l_neck_base_pt' translation='0.0646 1.5141 -0.038'> |
| 1083 | <!-- HAnimSite visualization shape --> |
| 1084 | <TouchSensor description='HAnimSite l_neck_base'/> |
| 1085 | <Shape USE='HAnimSiteShape'/> |
| 1086 | </HAnimSite> |
| 1087 | </HAnimSegment> |
| 1088 |
<!-- HAnimJoint
hanim_vc6 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc6 node: [from Stop_vc6_RotationInterpolator.value_changed to rotation ] [from Stand_vc6_YawInterpolator.value_changed to rotation ] [from Pitch_vc6_YawInterpolator.value_changed to rotation ] [from Yaw_vc6_YawInterpolator.value_changed to rotation ] [from Roll_vc6_YawInterpolator.value_changed to rotation ] [from Walk_vc6_YawInterpolator.value_changed to rotation ] [from Run_vc6_YawInterpolator.value_changed to rotation ] [from Jump_vc6_YawInterpolator.value_changed to rotation ] [from Kick_vc6_YawInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc6' center='0.0066 1.5357 -0.0143' name='vc6'> |
| 1089 | |
| 1090 | <!-- <HAnimJoint name='vc6'/> visualization sphere within <HAnimSegment name='c6'/> --> |
| 1091 | <TouchSensor description='HAnimJoint vc6, HAnimSegment c6'/> |
| 1092 | <Transform translation='0.0066 1.5357 -0.0143'> |
| 1093 | <Shape USE='HAnimJointShape'/> |
| 1094 | </Transform> |
| 1095 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc6'/> to <HAnimJoint name='vc5'/> --> |
| 1096 | <Shape> |
| 1097 | <LineSet vertexCount='2' containerField='geometry'> |
| 1098 | <Coordinate point='0.0066 1.5357 -0.0143 0.0066 1.552 -0.0082'/> |
| 1099 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1100 | </LineSet> |
| 1101 | </Shape> |
| 1102 | </HAnimSegment> |
| 1103 |
<!-- HAnimJoint
hanim_vc5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc5 node: [from Stop_vc5_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc5' center='0.0066 1.552 -0.0082' name='vc5'> |
| 1104 | |
| 1105 | <!-- <HAnimJoint name='vc5'/> visualization sphere within <HAnimSegment name='c5'/> --> |
| 1106 | <TouchSensor description='HAnimJoint vc5, HAnimSegment c5'/> |
| 1107 | <Transform translation='0.0066 1.552 -0.0082'> |
| 1108 | <Shape USE='HAnimJointShape'/> |
| 1109 | </Transform> |
| 1110 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc5'/> to <HAnimJoint name='vc4'/> --> |
| 1111 | <Shape> |
| 1112 | <LineSet vertexCount='2' containerField='geometry'> |
| 1113 | <Coordinate point='0.0066 1.552 -0.0082 0.0066 1.5662 -0.0084'/> |
| 1114 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1115 | </LineSet> |
| 1116 | </Shape> |
| 1117 | </HAnimSegment> |
| 1118 |
<!-- HAnimJoint
hanim_vc4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc4 node: [from Stop_vc4_RotationInterpolator.value_changed to rotation ] [from Pitches_neck_RotationInterpolator.value_changed to rotation ] [from Yaws_neck_RotationInterpolator.value_changed to rotation ] [from Rolls_neck_RotationInterpolator.value_changed to rotation ] [from Walk_neck_RotationInterpolator.value_changed to rotation ] [from Run_neck_RotationInterpolator_Run.value_changed to rotation ] [from Jump_neck_RotationInterpolator.value_changed to rotation ] [from Kick_neck_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc4' center='0.0066 1.5662 -0.0084' name='vc4'> |
| 1119 | |
| 1120 | <!-- <HAnimJoint name='vc4'/> visualization sphere within <HAnimSegment name='c4'/> --> |
| 1121 | <TouchSensor description='HAnimJoint vc4, HAnimSegment c4'/> |
| 1122 | <Transform translation='0.0066 1.5662 -0.0084'> |
| 1123 | <Shape USE='HAnimJointShape'/> |
| 1124 | </Transform> |
| 1125 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc4'/> to <HAnimJoint name='vc3'/> --> |
| 1126 | <Shape> |
| 1127 | <LineSet vertexCount='2' containerField='geometry'> |
| 1128 | <Coordinate point='0.0066 1.5662 -0.0084 0.0066 1.58 -0.0103'/> |
| 1129 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1130 | </LineSet> |
| 1131 | </Shape> |
| 1132 | </HAnimSegment> |
| 1133 |
<!-- HAnimJoint
hanim_vc3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc3 node: [from Stop_vc3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc3' center='0.0066 1.58 -0.0103' name='vc3'> |
| 1134 | |
| 1135 | <!-- <HAnimJoint name='vc3'/> visualization sphere within <HAnimSegment name='c3'/> --> |
| 1136 | <TouchSensor description='HAnimJoint vc3, HAnimSegment c3'/> |
| 1137 | <Transform translation='0.0066 1.58 -0.0103'> |
| 1138 | <Shape USE='HAnimJointShape'/> |
| 1139 | </Transform> |
| 1140 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc3'/> to <HAnimJoint name='vc2'/> --> |
| 1141 | <Shape> |
| 1142 | <LineSet vertexCount='2' containerField='geometry'> |
| 1143 | <Coordinate point='0.0066 1.58 -0.0103 0.0066 1.5928 -0.0103'/> |
| 1144 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1145 | </LineSet> |
| 1146 | </Shape> |
| 1147 | </HAnimSegment> |
| 1148 |
<!-- HAnimJoint
hanim_vc2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc2 node: [from Stop_vc2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc2' center='0.0066 1.5928 -0.0103' name='vc2'> |
| 1149 | |
| 1150 | <!-- <HAnimJoint name='vc2'/> visualization sphere within <HAnimSegment name='c2'/> --> |
| 1151 | <TouchSensor description='HAnimJoint vc2, HAnimSegment c2'/> |
| 1152 | <Transform translation='0.0066 1.5928 -0.0103'> |
| 1153 | <Shape USE='HAnimJointShape'/> |
| 1154 | </Transform> |
| 1155 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc2'/> to <HAnimJoint name='vc1'/> --> |
| 1156 | <Shape> |
| 1157 | <LineSet vertexCount='2' containerField='geometry'> |
| 1158 | <Coordinate point='0.0066 1.5928 -0.0103 0.0066 1.6144 -0.0034'/> |
| 1159 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1160 | </LineSet> |
| 1161 | </Shape> |
| 1162 | </HAnimSegment> |
| 1163 |
<!-- HAnimJoint
hanim_vc1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_vc1 node: [from Stop_vc1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_vc1' center='0.0066 1.6144 -0.0034' name='vc1'> |
| 1164 | |
| 1165 | <!-- <HAnimJoint name='vc1'/> visualization sphere within <HAnimSegment name='c1'/> --> |
| 1166 | <TouchSensor description='HAnimJoint vc1, HAnimSegment c1'/> |
| 1167 | <Transform translation='0.0066 1.6144 -0.0034'> |
| 1168 | <Shape USE='HAnimJointShape'/> |
| 1169 | </Transform> |
| 1170 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='vc1'/> to <HAnimJoint name='skullbase'/> --> |
| 1171 | <Shape> |
| 1172 | <LineSet vertexCount='2' containerField='geometry'> |
| 1173 | <Coordinate point='0.0066 1.6144 -0.0034 0.0044 1.6209 0.0236'/> |
| 1174 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1175 | </LineSet> |
| 1176 | </Shape> |
| 1177 | </HAnimSegment> |
| 1178 |
<!-- HAnimJoint
hanim_skullbase is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_skullbase node: [from Stop_skullbase_RotationInterpolator.value_changed to rotation ] [from Stand_head_RotationInterpolator.value_changed to rotation ] [from Pitches_head_RotationInterpolator.value_changed to rotation ] [from Yaws_head_RotationInterpolator.value_changed to rotation ] [from Rolls_head_RotationInterpolator.value_changed to rotation ] [from Walk_head_RotationInterpolator.value_changed to rotation ] [from Run_head_RotationInterpolator_Run.value_changed to rotation ] [from Jump_head_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_skullbase' center='0.0044 1.6209 0.0236' name='skullbase'> |
| 1179 |
<!-- HAnimSegment
hanim_skull is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_skull' name='skull'> |
| 1180 | <!-- <HAnimJoint name='skullbase'/> visualization sphere within <HAnimSegment name='skull'/> --> |
| 1181 | <TouchSensor description='HAnimJoint skullbase, HAnimSegment skull'/> |
| 1182 | <Transform translation='0.0044 1.6209 0.0236'> |
| 1183 | <Shape USE='HAnimJointShape'/> |
| 1184 | </Transform> |
| 1185 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyeball_joint'/> --> |
| 1186 | <Shape> |
| 1187 | <LineSet vertexCount='2' containerField='geometry'> |
| 1188 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.6332 0.0502'/> |
| 1189 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1190 | </LineSet> |
| 1191 | </Shape> |
| 1192 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyelid_joint'/> --> |
| 1193 | <Shape> |
| 1194 | <LineSet vertexCount='2' containerField='geometry'> |
| 1195 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.6332 0.0502'/> |
| 1196 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1197 | </LineSet> |
| 1198 | </Shape> |
| 1199 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='l_eyebrow_joint'/> --> |
| 1200 | <Shape> |
| 1201 | <LineSet vertexCount='2' containerField='geometry'> |
| 1202 | <Coordinate point='0.0044 1.6209 0.0236 0.0336 1.635 0.0506'/> |
| 1203 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1204 | </LineSet> |
| 1205 | </Shape> |
| 1206 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyeball_joint'/> --> |
| 1207 | <Shape> |
| 1208 | <LineSet vertexCount='2' containerField='geometry'> |
| 1209 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.6332 0.0502'/> |
| 1210 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1211 | </LineSet> |
| 1212 | </Shape> |
| 1213 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyelid_joint'/> --> |
| 1214 | <Shape> |
| 1215 | <LineSet vertexCount='2' containerField='geometry'> |
| 1216 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.6332 0.0502'/> |
| 1217 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1218 | </LineSet> |
| 1219 | </Shape> |
| 1220 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='r_eyebrow_joint'/> --> |
| 1221 | <Shape> |
| 1222 | <LineSet vertexCount='2' containerField='geometry'> |
| 1223 | <Coordinate point='0.0044 1.6209 0.0236 -0.0336 1.635 0.0506'/> |
| 1224 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1225 | </LineSet> |
| 1226 | </Shape> |
| 1227 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='skullbase'/> to <HAnimJoint name='temporomandibular'/> --> |
| 1228 | <Shape> |
| 1229 | <LineSet vertexCount='2' containerField='geometry'> |
| 1230 | <Coordinate point='0.0044 1.6209 0.0236 0 1.63 0.015'/> |
| 1231 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1232 | </LineSet> |
| 1233 | </Shape> |
| 1234 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='skull_tip'/> --> |
| 1235 | <Shape> |
| 1236 | <LineSet vertexCount='2' containerField='geometry'> |
| 1237 | <Coordinate point='0.0044 1.6209 0.0236 0.005 1.7504 0.0055'/> |
| 1238 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1239 | </LineSet> |
| 1240 | </Shape> |
| 1241 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='sellion'/> --> |
| 1242 | <Shape> |
| 1243 | <LineSet vertexCount='2' containerField='geometry'> |
| 1244 | <Coordinate point='0.0044 1.6209 0.0236 0.0058 1.6316 0.0852'/> |
| 1245 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1246 | </LineSet> |
| 1247 | </Shape> |
| 1248 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_infraorbitale'/> --> |
| 1249 | <Shape> |
| 1250 | <LineSet vertexCount='2' containerField='geometry'> |
| 1251 | <Coordinate point='0.0044 1.6209 0.0236 -0.0237 1.6171 0.0752'/> |
| 1252 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1253 | </LineSet> |
| 1254 | </Shape> |
| 1255 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_infraorbitale'/> --> |
| 1256 | <Shape> |
| 1257 | <LineSet vertexCount='2' containerField='geometry'> |
| 1258 | <Coordinate point='0.0044 1.6209 0.0236 0.0341 1.6171 0.0752'/> |
| 1259 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1260 | </LineSet> |
| 1261 | </Shape> |
| 1262 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='supramenton'/> --> |
| 1263 | <Shape> |
| 1264 | <LineSet vertexCount='2' containerField='geometry'> |
| 1265 | <Coordinate point='0.0044 1.6209 0.0236 0.0061 1.541 0.0805'/> |
| 1266 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1267 | </LineSet> |
| 1268 | </Shape> |
| 1269 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_tragion'/> --> |
| 1270 | <Shape> |
| 1271 | <LineSet vertexCount='2' containerField='geometry'> |
| 1272 | <Coordinate point='0.0044 1.6209 0.0236 -0.0646 1.6347 0.0302'/> |
| 1273 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1274 | </LineSet> |
| 1275 | </Shape> |
| 1276 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='r_gonion'/> --> |
| 1277 | <Shape> |
| 1278 | <LineSet vertexCount='2' containerField='geometry'> |
| 1279 | <Coordinate point='0.0044 1.6209 0.0236 -0.052 1.5529 0.0347'/> |
| 1280 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1281 | </LineSet> |
| 1282 | </Shape> |
| 1283 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_tragion'/> --> |
| 1284 | <Shape> |
| 1285 | <LineSet vertexCount='2' containerField='geometry'> |
| 1286 | <Coordinate point='0.0044 1.6209 0.0236 0.0739 1.6348 0.0282'/> |
| 1287 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1288 | </LineSet> |
| 1289 | </Shape> |
| 1290 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='l_gonion'/> --> |
| 1291 | <Shape> |
| 1292 | <LineSet vertexCount='2' containerField='geometry'> |
| 1293 | <Coordinate point='0.0044 1.6209 0.0236 0.0631 1.553 0.033'/> |
| 1294 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1295 | </LineSet> |
| 1296 | </Shape> |
| 1297 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='skullbase'/> to <HAnimSite name='nuchale'/> --> |
| 1298 | <Shape> |
| 1299 | <LineSet vertexCount='2' containerField='geometry'> |
| 1300 | <Coordinate point='0.0044 1.6209 0.0236 0.0039 1.5972 -0.0796'/> |
| 1301 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1302 | </LineSet> |
| 1303 | </Shape> |
| 1304 | <!-- TODO move skull_tip x to zero --> |
| 1305 |
<!-- HAnimSite
hanim_skull_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_skull_tip' name='skull_tip' translation='0.005 1.7504 0.0055'> |
| 1306 | <!-- HAnimSite visualization shape --> |
| 1307 | <TouchSensor description='HAnimSite skull_tip'/> |
| 1308 | <Shape USE='HAnimSiteShape'/> |
| 1309 | </HAnimSite> |
| 1310 |
<!-- HAnimSite
hanim_sellion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_sellion_pt' name='sellion_pt' translation='0.0058 1.6316 0.0852'> |
| 1311 | <!-- HAnimSite visualization shape --> |
| 1312 | <TouchSensor description='HAnimSite sellion'/> |
| 1313 | <Shape USE='HAnimSiteShape'/> |
| 1314 | </HAnimSite> |
| 1315 |
<!-- HAnimSite
hanim_r_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt' translation='-0.0237 1.6171 0.0752'> |
| 1316 | <!-- HAnimSite visualization shape --> |
| 1317 | <TouchSensor description='HAnimSite r_infraorbitale'/> |
| 1318 | <Shape USE='HAnimSiteShape'/> |
| 1319 | </HAnimSite> |
| 1320 |
<!-- HAnimSite
hanim_l_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt' translation='0.0341 1.6171 0.0752'> |
| 1321 | <!-- HAnimSite visualization shape --> |
| 1322 | <TouchSensor description='HAnimSite l_infraorbitale'/> |
| 1323 | <Shape USE='HAnimSiteShape'/> |
| 1324 | </HAnimSite> |
| 1325 |
<!-- HAnimSite
hanim_supramenton_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_supramenton_pt' name='supramenton_pt' translation='0.0061 1.541 0.0805'> |
| 1326 | <!-- HAnimSite visualization shape --> |
| 1327 | <TouchSensor description='HAnimSite supramenton'/> |
| 1328 | <Shape USE='HAnimSiteShape'/> |
| 1329 | </HAnimSite> |
| 1330 |
<!-- HAnimSite
hanim_r_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_tragion_pt' name='r_tragion_pt' translation='-0.0646 1.6347 0.0302'> |
| 1331 | <!-- HAnimSite visualization shape --> |
| 1332 | <TouchSensor description='HAnimSite r_tragion'/> |
| 1333 | <Shape USE='HAnimSiteShape'/> |
| 1334 | </HAnimSite> |
| 1335 |
<!-- HAnimSite
hanim_r_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_gonion_pt' name='r_gonion_pt' translation='-0.052 1.5529 0.0347'> |
| 1336 | <!-- HAnimSite visualization shape --> |
| 1337 | <TouchSensor description='HAnimSite r_gonion'/> |
| 1338 | <Shape USE='HAnimSiteShape'/> |
| 1339 | </HAnimSite> |
| 1340 |
<!-- HAnimSite
hanim_l_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_tragion_pt' name='l_tragion_pt' translation='0.0739 1.6348 0.0282'> |
| 1341 | <!-- HAnimSite visualization shape --> |
| 1342 | <TouchSensor description='HAnimSite l_tragion'/> |
| 1343 | <Shape USE='HAnimSiteShape'/> |
| 1344 | </HAnimSite> |
| 1345 |
<!-- HAnimSite
hanim_l_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_gonion_pt' name='l_gonion_pt' translation='0.0631 1.553 0.033'> |
| 1346 | <!-- HAnimSite visualization shape --> |
| 1347 | <TouchSensor description='HAnimSite l_gonion'/> |
| 1348 | <Shape USE='HAnimSiteShape'/> |
| 1349 | </HAnimSite> |
| 1350 |
<!-- HAnimSite
hanim_nuchale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_nuchale_pt' name='nuchale_pt' translation='0.0039 1.5972 -0.0796'> |
| 1351 | <!-- HAnimSite visualization shape --> |
| 1352 | <TouchSensor description='HAnimSite nuchale'/> |
| 1353 | <Shape USE='HAnimSiteShape'/> |
| 1354 | </HAnimSite> |
| 1355 | </HAnimSegment> |
| 1356 |
<!-- HAnimJoint
hanim_l_eyeball_joint is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_eyeball_joint node: [from Stop_l_eyeball_joint_RotationInterpolator.value_changed to rotation ] [from Stand_l_eyeball_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_eyeball_joint' center='0.0336 1.6332 0.0502' name='l_eyeball_joint'> |
| 1357 |
<!-- HAnimSegment
hanim_l_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyeball' name='l_eyeball'> |
| 1358 | <!-- <HAnimJoint name='l_eyeball_joint'/> visualization sphere within <HAnimSegment name='l_eyeball'/> --> |
| 1359 | <TouchSensor description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball'/> |
| 1360 | <Transform translation='0.0336 1.6332 0.0502'> |
| 1361 | <Shape USE='HAnimJointShape'/> |
| 1362 | </Transform> |
| 1363 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_eyeball_joint'/> to <HAnimSite name='l_eyeball_site_view'/> --> |
| 1364 | <Shape> |
| 1365 | <LineSet vertexCount='2' containerField='geometry'> |
| 1366 | <Coordinate point='0.0336 1.6332 0.0502 0.034 1.64 0.05'/> |
| 1367 |
<!-- ColorRGBA
HAnimSiteViewpointLineColorRGBA is a DEF node that has 3 USE nodes: USE_1, USE_2, USE_3 --> <ColorRGBA DEF='HAnimSiteViewpointLineColorRGBA' color='0 0 1 1 0 0 1 0.1'/> |
| 1368 | </LineSet> |
| 1369 | </Shape> |
| 1370 |
<!-- HAnimSite
hanim_l_eyeball_site_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_eyeball_site_view' name='l_eyeball_site_view' translation='0.034 1.64 0.05'> |
| 1371 | <Viewpoint DEF='hanim_l_eyeball_site_viewpoint' description='l_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 1372 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1373 | <Anchor description='HAnimSite Viewpoint hanim_l_eyeball_site_view' url=' "#hanim_l_eyeball_site_viewpoint" '> |
| 1374 | <LOD forceTransitions='true' range='0.04'> |
| 1375 | <WorldInfo info='"hide diamond when close"'/> |
| 1376 | |
| 1377 | <IndexedFaceSet DEF='SiteViewpointDiamondIFS' creaseAngle='0.5' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 1378 | <Coordinate point='0 0.01 0 -0.01 0 0 0 0 0.01 0.01 0 0 0 0 -0.01 0 -0.01 0'/> |
| 1379 | </IndexedFaceSet> |
| 1380 | <Appearance> |
| 1381 | <Material diffuseColor='0 0 1' transparency='0.6'/> |
| 1382 | </Appearance> |
| 1383 | </Shape> |
| 1384 | </LOD> |
| 1385 | </Anchor> |
| 1386 | </HAnimSite> |
| 1387 | </HAnimSegment> |
| 1388 | </HAnimJoint> |
| 1389 |
<!-- HAnimJoint
hanim_l_eyelid_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_eyelid_joint' center='0.0336 1.6332 0.0502' name='l_eyelid_joint'> |
| 1390 |
<!-- HAnimSegment
hanim_l_eyelid is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyelid' name='l_eyelid'> |
| 1391 | <!-- <HAnimJoint name='l_eyelid_joint'/> visualization sphere within <HAnimSegment name='l_eyelid'/> --> |
| 1392 | <TouchSensor description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid'/> |
| 1393 | <Transform translation='0.0336 1.6332 0.0502'> |
| 1394 | <Shape USE='HAnimJointShape'/> |
| 1395 | </Transform> |
| 1396 | </HAnimSegment> |
| 1397 | </HAnimJoint> |
| 1398 |
<!-- HAnimJoint
hanim_l_eyebrow_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_eyebrow_joint' center='0.0336 1.635 0.0506' name='l_eyebrow_joint'> |
| 1399 |
<!-- HAnimSegment
hanim_l_eyebrow is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_eyebrow' name='l_eyebrow'> |
| 1400 | <!-- <HAnimJoint name='l_eyebrow_joint'/> visualization sphere within <HAnimSegment name='l_eyebrow'/> --> |
| 1401 | <TouchSensor description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow'/> |
| 1402 | <Transform translation='0.0336 1.635 0.0506'> |
| 1403 | <Shape USE='HAnimJointShape'/> |
| 1404 | </Transform> |
| 1405 | </HAnimSegment> |
| 1406 | </HAnimJoint> |
| 1407 |
<!-- HAnimJoint
hanim_r_eyeball_joint is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_eyeball_joint node: [from Stop_r_eyeball_joint_RotationInterpolator.value_changed to rotation ] [from Stand_r_eyeball_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_eyeball_joint' center='-0.0336 1.6332 0.0502' name='r_eyeball_joint'> |
| 1408 |
<!-- HAnimSegment
hanim_r_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyeball' name='r_eyeball'> |
| 1409 | <!-- <HAnimJoint name='r_eyeball_joint'/> visualization sphere within <HAnimSegment name='r_eyeball'/> --> |
| 1410 | <TouchSensor description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball'/> |
| 1411 | <Transform translation='-0.0336 1.6332 0.0502'> |
| 1412 | <Shape USE='HAnimJointShape'/> |
| 1413 | </Transform> |
| 1414 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_eyeball_joint'/> to <HAnimSite name='r_eyeball_site_view'/> --> |
| 1415 | <Shape> |
| 1416 | <LineSet vertexCount='2' containerField='geometry'> |
| 1417 | <Coordinate point='-0.0336 1.6332 0.0502 -0.034 1.64 0.05'/> |
| 1418 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 1419 | </LineSet> |
| 1420 | </Shape> |
| 1421 |
<!-- HAnimSite
hanim_r_eyeball_site_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_eyeball_site_view' name='r_eyeball_site_view' translation='-0.034 1.64 0.05'> |
| 1422 | <Viewpoint DEF='hanim_r_eyeball_site_viewpoint' description='r_eyeball_site_viewpoint looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 1423 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1424 | <Anchor description='HAnimSite Viewpoint hanim_r_eyeball_site_view' url=' "#hanim_r_eyeball_site_viewpoint" '> |
| 1425 | <LOD forceTransitions='true' range='0.04'> |
| 1426 | <WorldInfo info='"hide diamond when close"'/> |
| 1427 | <Shape USE='HAnimSiteViewpointShape'/> |
| 1428 | </LOD> |
| 1429 | </Anchor> |
| 1430 | </HAnimSite> |
| 1431 | </HAnimSegment> |
| 1432 | </HAnimJoint> |
| 1433 |
<!-- HAnimJoint
hanim_r_eyelid_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_eyelid_joint' center='-0.0336 1.6332 0.0502' name='r_eyelid_joint'> |
| 1434 |
<!-- HAnimSegment
hanim_r_eyelid is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyelid' name='r_eyelid'> |
| 1435 | <!-- <HAnimJoint name='r_eyelid_joint'/> visualization sphere within <HAnimSegment name='r_eyelid'/> --> |
| 1436 | <TouchSensor description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid'/> |
| 1437 | <Transform translation='-0.0336 1.6332 0.0502'> |
| 1438 | <Shape USE='HAnimJointShape'/> |
| 1439 | </Transform> |
| 1440 | </HAnimSegment> |
| 1441 | </HAnimJoint> |
| 1442 |
<!-- HAnimJoint
hanim_r_eyebrow_joint is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_eyebrow_joint' center='-0.0336 1.635 0.0506' name='r_eyebrow_joint'> |
| 1443 |
<!-- HAnimSegment
hanim_r_eyebrow is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_eyebrow' name='r_eyebrow'> |
| 1444 | <!-- <HAnimJoint name='r_eyebrow_joint'/> visualization sphere within <HAnimSegment name='r_eyebrow'/> --> |
| 1445 | <TouchSensor description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow'/> |
| 1446 | <Transform translation='-0.0336 1.635 0.0506'> |
| 1447 | <Shape USE='HAnimJointShape'/> |
| 1448 | </Transform> |
| 1449 | </HAnimSegment> |
| 1450 | </HAnimJoint> |
| 1451 | <!-- Single joint, single segment for jaw, two sites for left/right TMJs https://en.wikipedia.org/wiki/Temporomandibular_joint --> |
| 1452 |
<!-- HAnimJoint
hanim_temporomandibular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_temporomandibular' center='0 1.63 0.015' name='temporomandibular'> |
| 1453 | |
| 1454 | <!-- <HAnimJoint name='temporomandibular'/> visualization sphere within <HAnimSegment name='jaw'/> --> |
| 1455 | <TouchSensor description='HAnimJoint temporomandibular, HAnimSegment jaw'/> |
| 1456 | <Transform translation='0 1.63 0.015'> |
| 1457 | <Shape USE='HAnimJointShape'/> |
| 1458 | </Transform> |
| 1459 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_l_site'/> --> |
| 1460 | <Shape> |
| 1461 | <LineSet vertexCount='2' containerField='geometry'> |
| 1462 | <Coordinate point='0 1.63 0.015 0.045 1.63 0'/> |
| 1463 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1464 | </LineSet> |
| 1465 | </Shape> |
| 1466 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='temporomandibular'/> to <HAnimSite name='temporomandibular_r_site'/> --> |
| 1467 | <Shape> |
| 1468 | <LineSet vertexCount='2' containerField='geometry'> |
| 1469 | <Coordinate point='0 1.63 0.015 -0.045 1.63 0'/> |
| 1470 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1471 | </LineSet> |
| 1472 | </Shape> |
| 1473 |
<!-- HAnimSite
hanim_temporomandibular_l_site_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_temporomandibular_l_site_pt' name='temporomandibular_l_site_pt' translation='0.045 1.63 0'> |
| 1474 | <!-- HAnimSite visualization shape --> |
| 1475 | <TouchSensor description='HAnimSite temporomandibular_l_site'/> |
| 1476 | <Shape USE='HAnimSiteShape'/> |
| 1477 | </HAnimSite> |
| 1478 |
<!-- HAnimSite
hanim_temporomandibular_r_site_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_temporomandibular_r_site_pt' name='temporomandibular_r_site_pt' translation='-0.045 1.63 0'> |
| 1479 | <!-- HAnimSite visualization shape --> |
| 1480 | <TouchSensor description='HAnimSite temporomandibular_r_site'/> |
| 1481 | <Shape USE='HAnimSiteShape'/> |
| 1482 | </HAnimSite> |
| 1483 | </HAnimSegment> |
| 1484 | </HAnimJoint> |
| 1485 | </HAnimJoint> |
| 1486 | </HAnimJoint> |
| 1487 | </HAnimJoint> |
| 1488 | </HAnimJoint> |
| 1489 | </HAnimJoint> |
| 1490 | </HAnimJoint> |
| 1491 | </HAnimJoint> |
| 1492 | </HAnimJoint> |
| 1493 |
<!-- HAnimJoint
hanim_l_sternoclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_sternoclavicular node: [from Stop_l_sternoclavicular_RotationInterpolator.value_changed to rotation ] [from Stand_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Pitch_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Yaw_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Roll_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Walk_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Run_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Jump_l_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Kick_l_sternoclavicular_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_sternoclavicular' center='0.082 1.4488 -0.0353' name='l_sternoclavicular'> |
| 1494 |
<!-- HAnimSegment
hanim_l_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_clavicle' name='l_clavicle'> |
| 1495 | <!-- <HAnimJoint name='l_sternoclavicular'/> visualization sphere within <HAnimSegment name='l_clavicle'/> --> |
| 1496 | <TouchSensor description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle'/> |
| 1497 | <Transform translation='0.082 1.4488 -0.0353'> |
| 1498 | <Shape USE='HAnimJointShape'/> |
| 1499 | </Transform> |
| 1500 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_sternoclavicular'/> to <HAnimJoint name='l_acromioclavicular'/> --> |
| 1501 | <Shape> |
| 1502 | <LineSet vertexCount='2' containerField='geometry'> |
| 1503 | <Coordinate point='0.082 1.4488 -0.0353 0.0962 1.4269 -0.0424'/> |
| 1504 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1505 | </LineSet> |
| 1506 | </Shape> |
| 1507 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_clavicale'/> --> |
| 1508 | <Shape> |
| 1509 | <LineSet vertexCount='2' containerField='geometry'> |
| 1510 | <Coordinate point='0.082 1.4488 -0.0353 0.0271 1.4943 0.0394'/> |
| 1511 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1512 | </LineSet> |
| 1513 | </Shape> |
| 1514 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_acromion'/> --> |
| 1515 | <Shape> |
| 1516 | <LineSet vertexCount='2' containerField='geometry'> |
| 1517 | <Coordinate point='0.082 1.4488 -0.0353 0.2032 1.476 -0.049'/> |
| 1518 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1519 | </LineSet> |
| 1520 | </Shape> |
| 1521 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_ant'/> --> |
| 1522 | <Shape> |
| 1523 | <LineSet vertexCount='2' containerField='geometry'> |
| 1524 | <Coordinate point='0.082 1.4488 -0.0353 0.1777 1.4065 -0.0075'/> |
| 1525 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1526 | </LineSet> |
| 1527 | </Shape> |
| 1528 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_sternoclavicular'/> to <HAnimSite name='l_axilla_post'/> --> |
| 1529 | <Shape> |
| 1530 | <LineSet vertexCount='2' containerField='geometry'> |
| 1531 | <Coordinate point='0.082 1.4488 -0.0353 0.1706 1.4072 -0.0875'/> |
| 1532 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1533 | </LineSet> |
| 1534 | </Shape> |
| 1535 |
<!-- HAnimSite
hanim_l_clavicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_clavicale_pt' name='l_clavicale_pt' translation='0.0271 1.4943 0.0394'> |
| 1536 | <!-- HAnimSite visualization shape --> |
| 1537 | <TouchSensor description='HAnimSite l_clavicale'/> |
| 1538 | <Shape USE='HAnimSiteShape'/> |
| 1539 | </HAnimSite> |
| 1540 |
<!-- HAnimSite
hanim_l_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_acromion_pt' name='l_acromion_pt' translation='0.2032 1.476 -0.049'> |
| 1541 | <!-- HAnimSite visualization shape --> |
| 1542 | <TouchSensor description='HAnimSite l_acromion'/> |
| 1543 | <Shape USE='HAnimSiteShape'/> |
| 1544 | </HAnimSite> |
| 1545 |
<!-- HAnimSite
hanim_l_axilla_ant_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_axilla_ant_pt' name='l_axilla_ant_pt' translation='0.1777 1.4065 -0.0075'> |
| 1546 | <!-- HAnimSite visualization shape --> |
| 1547 | <TouchSensor description='HAnimSite l_axilla_ant'/> |
| 1548 | <Shape USE='HAnimSiteShape'/> |
| 1549 | </HAnimSite> |
| 1550 |
<!-- HAnimSite
hanim_l_axilla_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_axilla_post_pt' name='l_axilla_post_pt' translation='0.1706 1.4072 -0.0875'> |
| 1551 | <!-- HAnimSite visualization shape --> |
| 1552 | <TouchSensor description='HAnimSite l_axilla_post'/> |
| 1553 | <Shape USE='HAnimSiteShape'/> |
| 1554 | </HAnimSite> |
| 1555 | </HAnimSegment> |
| 1556 |
<!-- HAnimJoint
hanim_l_acromioclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_acromioclavicular node: [from Stop_l_acromioclavicular_RotationInterpolator.value_changed to rotation ] [from Stand_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Pitch_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Yaw_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Roll_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Walk_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Run_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Jump_l_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Kick_l_acromioclavicular_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_acromioclavicular' center='0.0962 1.4269 -0.0424' name='l_acromioclavicular'> |
| 1557 |
<!-- HAnimSegment
hanim_l_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_scapula' name='l_scapula'> |
| 1558 | <!-- <HAnimJoint name='l_acromioclavicular'/> visualization sphere within <HAnimSegment name='l_scapula'/> --> |
| 1559 | <TouchSensor description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula'/> |
| 1560 | <Transform translation='0.0962 1.4269 -0.0424'> |
| 1561 | <Shape USE='HAnimJointShape'/> |
| 1562 | </Transform> |
| 1563 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_acromioclavicular'/> to <HAnimJoint name='l_shoulder'/> --> |
| 1564 | <Shape> |
| 1565 | <LineSet vertexCount='2' containerField='geometry'> |
| 1566 | <Coordinate point='0.0962 1.4269 -0.0424 0.2029 1.4376 -0.0387'/> |
| 1567 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1568 | </LineSet> |
| 1569 | </Shape> |
| 1570 | </HAnimSegment> |
| 1571 |
<!-- HAnimJoint
hanim_l_shoulder is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_shoulder node: [from Stop_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Stand_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Pitches_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Yaws_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Rolls_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Walk_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Run_l_shoulder_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_shoulder_RotationInterpolator.value_changed to rotation ] [from Kick_l_shoulder_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_shoulder' center='0.2029 1.4376 -0.0387' name='l_shoulder'> |
| 1572 |
<!-- HAnimSegment
hanim_l_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_upperarm' name='l_upperarm'> |
| 1573 | <!-- <HAnimJoint name='l_shoulder'/> visualization sphere within <HAnimSegment name='l_upperarm'/> --> |
| 1574 | <TouchSensor description='HAnimJoint l_shoulder, HAnimSegment l_upperarm'/> |
| 1575 | <Transform translation='0.2029 1.4376 -0.0387'> |
| 1576 | <Shape USE='HAnimJointShape'/> |
| 1577 | </Transform> |
| 1578 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_shoulder'/> to <HAnimJoint name='l_elbow'/> --> |
| 1579 | <Shape> |
| 1580 | <LineSet vertexCount='2' containerField='geometry'> |
| 1581 | <Coordinate point='0.2029 1.4376 -0.0387 0.2014 1.1357 -0.0682'/> |
| 1582 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1583 | </LineSet> |
| 1584 | </Shape> |
| 1585 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_shoulder'/> to <HAnimSite name='l_humeral_lateral_epicn'/> --> |
| 1586 | <Shape> |
| 1587 | <LineSet vertexCount='2' containerField='geometry'> |
| 1588 | <Coordinate point='0.2029 1.4376 -0.0387 0.228 1.1482 -0.11'/> |
| 1589 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1590 | </LineSet> |
| 1591 | </Shape> |
| 1592 |
<!-- HAnimSite
hanim_l_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt' translation='0.228 1.1482 -0.11'> |
| 1593 | <!-- HAnimSite visualization shape --> |
| 1594 | <TouchSensor description='HAnimSite l_humeral_lateral_epicn'/> |
| 1595 | <Shape USE='HAnimSiteShape'/> |
| 1596 | </HAnimSite> |
| 1597 | </HAnimSegment> |
| 1598 |
<!-- HAnimJoint
hanim_l_elbow is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_elbow node: [from Stop_l_elbow_RotationInterpolator.value_changed to rotation ] [from Stand_l_elbow_RotationInterpolator.value_changed to rotation ] [from Pitches_l_elbow_RotationInterpolator.value_changed to rotation ] [from Yaws_l_elbow_RotationInterpolator.value_changed to rotation ] [from Rolls_l_elbow_RotationInterpolator.value_changed to rotation ] [from Walk_l_elbow_RotationInterpolator.value_changed to rotation ] [from Run_l_elbow_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_elbow_RotationInterpolator.value_changed to rotation ] [from Kick_l_ForeArm_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_elbow' center='0.2014 1.1357 -0.0682' name='l_elbow'> |
| 1599 |
<!-- HAnimSegment
hanim_l_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_forearm' name='l_forearm'> |
| 1600 | <!-- <HAnimJoint name='l_elbow'/> visualization sphere within <HAnimSegment name='l_forearm'/> --> |
| 1601 | <TouchSensor description='HAnimJoint l_elbow, HAnimSegment l_forearm'/> |
| 1602 | <Transform translation='0.2014 1.1357 -0.0682'> |
| 1603 | <Shape USE='HAnimJointShape'/> |
| 1604 | </Transform> |
| 1605 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_elbow'/> to <HAnimJoint name='l_wrist'/> --> |
| 1606 | <Shape> |
| 1607 | <LineSet vertexCount='2' containerField='geometry'> |
| 1608 | <Coordinate point='0.2014 1.1357 -0.0682 0.1984 0.8663 -0.0583'/> |
| 1609 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1610 | </LineSet> |
| 1611 | </Shape> |
| 1612 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radial_styloid'/> --> |
| 1613 | <Shape> |
| 1614 | <LineSet vertexCount='2' containerField='geometry'> |
| 1615 | <Coordinate point='0.2014 1.1357 -0.0682 0.1901 0.8645 -0.0415'/> |
| 1616 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1617 | </LineSet> |
| 1618 | </Shape> |
| 1619 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_olecranon'/> --> |
| 1620 | <Shape> |
| 1621 | <LineSet vertexCount='2' containerField='geometry'> |
| 1622 | <Coordinate point='0.2014 1.1357 -0.0682 0.1962 1.1375 -0.1123'/> |
| 1623 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1624 | </LineSet> |
| 1625 | </Shape> |
| 1626 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_humeral_medial_epicn'/> --> |
| 1627 | <Shape> |
| 1628 | <LineSet vertexCount='2' containerField='geometry'> |
| 1629 | <Coordinate point='0.2014 1.1357 -0.0682 0.1735 1.1272 -0.1113'/> |
| 1630 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1631 | </LineSet> |
| 1632 | </Shape> |
| 1633 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_elbow'/> to <HAnimSite name='l_radiale'/> --> |
| 1634 | <Shape> |
| 1635 | <LineSet vertexCount='2' containerField='geometry'> |
| 1636 | <Coordinate point='0.2014 1.1357 -0.0682 0.2182 1.1212 -0.1167'/> |
| 1637 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1638 | </LineSet> |
| 1639 | </Shape> |
| 1640 |
<!-- HAnimSite
hanim_l_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt' translation='0.1901 0.8645 -0.0415'> |
| 1641 | <!-- HAnimSite visualization shape --> |
| 1642 | <TouchSensor description='HAnimSite l_radial_styloid'/> |
| 1643 | <Shape USE='HAnimSiteShape'/> |
| 1644 | </HAnimSite> |
| 1645 |
<!-- HAnimSite
hanim_l_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_olecranon_pt' name='l_olecranon_pt' translation='0.1962 1.1375 -0.1123'> |
| 1646 | <!-- HAnimSite visualization shape --> |
| 1647 | <TouchSensor description='HAnimSite l_olecranon'/> |
| 1648 | <Shape USE='HAnimSiteShape'/> |
| 1649 | </HAnimSite> |
| 1650 |
<!-- HAnimSite
hanim_l_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt' translation='0.1735 1.1272 -0.1113'> |
| 1651 | <!-- HAnimSite visualization shape --> |
| 1652 | <TouchSensor description='HAnimSite l_humeral_medial_epicn'/> |
| 1653 | <Shape USE='HAnimSiteShape'/> |
| 1654 | </HAnimSite> |
| 1655 |
<!-- HAnimSite
hanim_l_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_radiale_pt' name='l_radiale_pt' translation='0.2182 1.1212 -0.1167'> |
| 1656 | <!-- HAnimSite visualization shape --> |
| 1657 | <TouchSensor description='HAnimSite l_radiale'/> |
| 1658 | <Shape USE='HAnimSiteShape'/> |
| 1659 | </HAnimSite> |
| 1660 | </HAnimSegment> |
| 1661 |
<!-- HAnimJoint
hanim_l_wrist is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_wrist node: [from Stop_l_wrist_RotationInterpolator.value_changed to rotation ] [from Stand_l_wrist_RotationInterpolator.value_changed to rotation ] [from Pitches_l_wrist_RotationInterpolator.value_changed to rotation ] [from Yaws_l_wrist_RotationInterpolator.value_changed to rotation ] [from Rolls_l_wrist_RotationInterpolator.value_changed to rotation ] [from Walk_l_wrist_RotationInterpolator.value_changed to rotation ] [from Run_l_wrist_RotationInterpolator_Run.value_changed to rotation ] [from Jump_l_wrist_RotationInterpolator.value_changed to rotation ] [from Kick_l_wrist_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_wrist' center='0.1984 0.8663 -0.0583' name='l_wrist'> |
| 1662 |
<!-- HAnimSegment
hanim_l_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hand' name='l_hand'> |
| 1663 | <!-- <HAnimJoint name='l_wrist'/> visualization sphere within <HAnimSegment name='l_hand'/> --> |
| 1664 | <TouchSensor description='HAnimJoint l_wrist, HAnimSegment l_hand'/> |
| 1665 | <Transform translation='0.1984 0.8663 -0.0583'> |
| 1666 | <Shape USE='HAnimJointShape'/> |
| 1667 | </Transform> |
| 1668 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_thumb1'/> --> |
| 1669 | <Shape> |
| 1670 | <LineSet vertexCount='2' containerField='geometry'> |
| 1671 | <Coordinate point='0.1984 0.8663 -0.0583 0.1924 0.8472 -0.0534'/> |
| 1672 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1673 | </LineSet> |
| 1674 | </Shape> |
| 1675 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_index0'/> --> |
| 1676 | <Shape> |
| 1677 | <LineSet vertexCount='2' containerField='geometry'> |
| 1678 | <Coordinate point='0.1984 0.8663 -0.0583 0.1983 0.8024 -0.028'/> |
| 1679 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1680 | </LineSet> |
| 1681 | </Shape> |
| 1682 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_middle0'/> --> |
| 1683 | <Shape> |
| 1684 | <LineSet vertexCount='2' containerField='geometry'> |
| 1685 | <Coordinate point='0.1984 0.8663 -0.0583 0.1987 0.8029 -0.053'/> |
| 1686 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1687 | </LineSet> |
| 1688 | </Shape> |
| 1689 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_ring0'/> --> |
| 1690 | <Shape> |
| 1691 | <LineSet vertexCount='2' containerField='geometry'> |
| 1692 | <Coordinate point='0.1984 0.8663 -0.0583 0.1956 0.8019 -0.0794'/> |
| 1693 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1694 | </LineSet> |
| 1695 | </Shape> |
| 1696 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_wrist'/> to <HAnimJoint name='l_pinky0'/> --> |
| 1697 | <Shape> |
| 1698 | <LineSet vertexCount='2' containerField='geometry'> |
| 1699 | <Coordinate point='0.1984 0.8663 -0.0583 0.1925 0.8066 -0.1036'/> |
| 1700 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1701 | </LineSet> |
| 1702 | </Shape> |
| 1703 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha2'/> --> |
| 1704 | <Shape> |
| 1705 | <LineSet vertexCount='2' containerField='geometry'> |
| 1706 | <Coordinate point='0.1984 0.8663 -0.0583 0.2009 0.8139 -0.0237'/> |
| 1707 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1708 | </LineSet> |
| 1709 | </Shape> |
| 1710 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_ulnar_styloid'/> --> |
| 1711 | <Shape> |
| 1712 | <LineSet vertexCount='2' containerField='geometry'> |
| 1713 | <Coordinate point='0.1984 0.8663 -0.0583 0.2142 0.8529 -0.0648'/> |
| 1714 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1715 | </LineSet> |
| 1716 | </Shape> |
| 1717 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_metacarpal_pha5'/> --> |
| 1718 | <Shape> |
| 1719 | <LineSet vertexCount='2' containerField='geometry'> |
| 1720 | <Coordinate point='0.1984 0.8663 -0.0583 0.1929 0.786 -0.1122'/> |
| 1721 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1722 | </LineSet> |
| 1723 | </Shape> |
| 1724 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='l_wrist'/> to <HAnimSite name='l_hand_front_view'/> --> |
| 1725 | <Shape> |
| 1726 | <LineSet vertexCount='2' containerField='geometry'> |
| 1727 | <Coordinate point='0.1984 0.8663 -0.0583 0.3 0.75 0.45'/> |
| 1728 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 1729 | </LineSet> |
| 1730 | </Shape> |
| 1731 |
<!-- HAnimSite
hanim_l_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt' translation='0.2009 0.8139 -0.0237'> |
| 1732 | <!-- HAnimSite visualization shape --> |
| 1733 | <TouchSensor description='HAnimSite l_metacarpal_pha2'/> |
| 1734 | <Shape USE='HAnimSiteShape'/> |
| 1735 | </HAnimSite> |
| 1736 |
<!-- HAnimSite
hanim_l_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt' translation='0.2142 0.8529 -0.0648'> |
| 1737 | <!-- HAnimSite visualization shape --> |
| 1738 | <TouchSensor description='HAnimSite l_ulnar_styloid'/> |
| 1739 | <Shape USE='HAnimSiteShape'/> |
| 1740 | </HAnimSite> |
| 1741 |
<!-- HAnimSite
hanim_l_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt' translation='0.1929 0.786 -0.1122'> |
| 1742 | <!-- HAnimSite visualization shape --> |
| 1743 | <TouchSensor description='HAnimSite l_metacarpal_pha5'/> |
| 1744 | <Shape USE='HAnimSiteShape'/> |
| 1745 | </HAnimSite> |
| 1746 |
<!-- HAnimSite
hanim_l_hand_front_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_hand_front_view' name='l_hand_front_view' translation='0.3 0.75 0.45'> |
| 1747 | <Viewpoint DEF='hanim_l_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='left hand front' position='0 0 0'/> |
| 1748 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 1749 | <Anchor description='HAnimSite Viewpoint hanim_l_hand_front_view' url=' "#hanim_l_hand_front_viewpoint" '> |
| 1750 | <LOD forceTransitions='true' range='0.04'> |
| 1751 | <WorldInfo info='"hide diamond when close"'/> |
| 1752 | <Shape USE='HAnimSiteViewpointShape'/> |
| 1753 | </LOD> |
| 1754 | </Anchor> |
| 1755 | </HAnimSite> |
| 1756 | </HAnimSegment> |
| 1757 |
<!-- HAnimJoint
hanim_l_thumb1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_thumb1 node: [from Stop_l_thumb1_RotationInterpolator.value_changed to rotation ] [from Stand_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Pitch_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Yaw_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Roll_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Walk_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Run_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Jump_l_thumb1_PitchInterpolator.value_changed to rotation ] [from Kick_l_thumb1_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_thumb1' center='0.1924 0.8472 -0.0534' name='l_thumb1'> |
| 1758 |
<!-- HAnimSegment
hanim_l_thumb_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_metacarpal' name='l_thumb_metacarpal'> |
| 1759 | <!-- <HAnimJoint name='l_thumb1'/> visualization sphere within <HAnimSegment name='l_thumb_metacarpal'/> --> |
| 1760 | <TouchSensor description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal'/> |
| 1761 | <Transform translation='0.1924 0.8472 -0.0534'> |
| 1762 | <Shape USE='HAnimJointShape'/> |
| 1763 | </Transform> |
| 1764 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb1'/> to <HAnimJoint name='l_thumb2'/> --> |
| 1765 | <Shape> |
| 1766 | <LineSet vertexCount='2' containerField='geometry'> |
| 1767 | <Coordinate point='0.1924 0.8472 -0.0534 0.1951 0.8226 0.0246'/> |
| 1768 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1769 | </LineSet> |
| 1770 | </Shape> |
| 1771 | </HAnimSegment> |
| 1772 |
<!-- HAnimJoint
hanim_l_thumb2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_thumb2 node: [from Stop_l_thumb2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_thumb2' center='0.1951 0.8226 0.0246' name='l_thumb2'> |
| 1773 |
<!-- HAnimSegment
hanim_l_thumb_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_proximal' name='l_thumb_proximal'> |
| 1774 | <!-- <HAnimJoint name='l_thumb2'/> visualization sphere within <HAnimSegment name='l_thumb_proximal'/> --> |
| 1775 | <TouchSensor description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal'/> |
| 1776 | <Transform translation='0.1951 0.8226 0.0246'> |
| 1777 | <Shape USE='HAnimJointShape'/> |
| 1778 | </Transform> |
| 1779 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_thumb2'/> to <HAnimJoint name='l_thumb3'/> --> |
| 1780 | <Shape> |
| 1781 | <LineSet vertexCount='2' containerField='geometry'> |
| 1782 | <Coordinate point='0.1951 0.8226 0.0246 0.1955 0.8159 0.0464'/> |
| 1783 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1784 | </LineSet> |
| 1785 | </Shape> |
| 1786 | </HAnimSegment> |
| 1787 |
<!-- HAnimJoint
hanim_l_thumb3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_thumb3 node: [from Stop_l_thumb3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_thumb3' center='0.1955 0.8159 0.0464' name='l_thumb3'> |
| 1788 |
<!-- HAnimSegment
hanim_l_thumb_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thumb_distal' name='l_thumb_distal'> |
| 1789 | <!-- <HAnimJoint name='l_thumb3'/> visualization sphere within <HAnimSegment name='l_thumb_distal'/> --> |
| 1790 | <TouchSensor description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal'/> |
| 1791 | <Transform translation='0.1955 0.8159 0.0464'> |
| 1792 | <Shape USE='HAnimJointShape'/> |
| 1793 | </Transform> |
| 1794 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_thumb3'/> to <HAnimSite name='l_thumb_distal_tip'/> --> |
| 1795 | <Shape> |
| 1796 | <LineSet vertexCount='2' containerField='geometry'> |
| 1797 | <Coordinate point='0.1955 0.8159 0.0464 0.1982 0.8061 0.0759'/> |
| 1798 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1799 | </LineSet> |
| 1800 | </Shape> |
| 1801 |
<!-- HAnimSite
hanim_l_thumb_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_thumb_distal_tip' name='l_thumb_distal_tip' translation='0.1982 0.8061 0.0759'> |
| 1802 | <!-- HAnimSite visualization shape --> |
| 1803 | <TouchSensor description='HAnimSite l_thumb_distal_tip'/> |
| 1804 | <Shape USE='HAnimSiteShape'/> |
| 1805 | </HAnimSite> |
| 1806 | </HAnimSegment> |
| 1807 | </HAnimJoint> |
| 1808 | </HAnimJoint> |
| 1809 | </HAnimJoint> |
| 1810 |
<!-- HAnimJoint
hanim_l_index0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_index0 node: [from Stop_l_index0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_index0' center='0.1983 0.8024 -0.028' name='l_index0'> |
| 1811 |
<!-- HAnimSegment
hanim_l_index_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_metacarpal' name='l_index_metacarpal'> |
| 1812 | <!-- <HAnimJoint name='l_index0'/> visualization sphere within <HAnimSegment name='l_index_metacarpal'/> --> |
| 1813 | <TouchSensor description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal'/> |
| 1814 | <Transform translation='0.1983 0.8024 -0.028'> |
| 1815 | <Shape USE='HAnimJointShape'/> |
| 1816 | </Transform> |
| 1817 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index0'/> to <HAnimJoint name='l_index1'/> --> |
| 1818 | <Shape> |
| 1819 | <LineSet vertexCount='2' containerField='geometry'> |
| 1820 | <Coordinate point='0.1983 0.8024 -0.028 0.1983 0.7815 -0.028'/> |
| 1821 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1822 | </LineSet> |
| 1823 | </Shape> |
| 1824 | </HAnimSegment> |
| 1825 |
<!-- HAnimJoint
hanim_l_index1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_index1 node: [from Stop_l_index1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_index1' center='0.1983 0.7815 -0.028' name='l_index1'> |
| 1826 |
<!-- HAnimSegment
hanim_l_index_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_proximal' name='l_index_proximal'> |
| 1827 | <!-- <HAnimJoint name='l_index1'/> visualization sphere within <HAnimSegment name='l_index_proximal'/> --> |
| 1828 | <TouchSensor description='HAnimJoint l_index1, HAnimSegment l_index_proximal'/> |
| 1829 | <Transform translation='0.1983 0.7815 -0.028'> |
| 1830 | <Shape USE='HAnimJointShape'/> |
| 1831 | </Transform> |
| 1832 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index1'/> to <HAnimJoint name='l_index2'/> --> |
| 1833 | <Shape> |
| 1834 | <LineSet vertexCount='2' containerField='geometry'> |
| 1835 | <Coordinate point='0.1983 0.7815 -0.028 0.2017 0.7363 -0.0248'/> |
| 1836 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1837 | </LineSet> |
| 1838 | </Shape> |
| 1839 | </HAnimSegment> |
| 1840 |
<!-- HAnimJoint
hanim_l_index2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_index2 node: [from Stop_l_index2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_index2' center='0.2017 0.7363 -0.0248' name='l_index2'> |
| 1841 |
<!-- HAnimSegment
hanim_l_index_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_middle' name='l_index_middle'> |
| 1842 | <!-- <HAnimJoint name='l_index2'/> visualization sphere within <HAnimSegment name='l_index_middle'/> --> |
| 1843 | <TouchSensor description='HAnimJoint l_index2, HAnimSegment l_index_middle'/> |
| 1844 | <Transform translation='0.2017 0.7363 -0.0248'> |
| 1845 | <Shape USE='HAnimJointShape'/> |
| 1846 | </Transform> |
| 1847 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_index2'/> to <HAnimJoint name='l_index3'/> --> |
| 1848 | <Shape> |
| 1849 | <LineSet vertexCount='2' containerField='geometry'> |
| 1850 | <Coordinate point='0.2017 0.7363 -0.0248 0.2028 0.7139 -0.0236'/> |
| 1851 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1852 | </LineSet> |
| 1853 | </Shape> |
| 1854 | </HAnimSegment> |
| 1855 |
<!-- HAnimJoint
hanim_l_index3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_index3 node: [from Stop_l_index3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_index3' center='0.2028 0.7139 -0.0236' name='l_index3'> |
| 1856 |
<!-- HAnimSegment
hanim_l_index_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_index_distal' name='l_index_distal'> |
| 1857 | <!-- <HAnimJoint name='l_index3'/> visualization sphere within <HAnimSegment name='l_index_distal'/> --> |
| 1858 | <TouchSensor description='HAnimJoint l_index3, HAnimSegment l_index_distal'/> |
| 1859 | <Transform translation='0.2028 0.7139 -0.0236'> |
| 1860 | <Shape USE='HAnimJointShape'/> |
| 1861 | </Transform> |
| 1862 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_index_distal_tip'/> --> |
| 1863 | <Shape> |
| 1864 | <LineSet vertexCount='2' containerField='geometry'> |
| 1865 | <Coordinate point='0.2028 0.7139 -0.0236 0.2089 0.6858 -0.0245'/> |
| 1866 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1867 | </LineSet> |
| 1868 | </Shape> |
| 1869 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_index3'/> to <HAnimSite name='l_dactylion'/> --> |
| 1870 | <Shape> |
| 1871 | <LineSet vertexCount='2' containerField='geometry'> |
| 1872 | <Coordinate point='0.2028 0.7139 -0.0236 0.2056 0.6743 -0.0482'/> |
| 1873 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1874 | </LineSet> |
| 1875 | </Shape> |
| 1876 |
<!-- HAnimSite
hanim_l_index_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_index_distal_tip' name='l_index_distal_tip' translation='0.2089 0.6858 -0.0245'> |
| 1877 | <!-- HAnimSite visualization shape --> |
| 1878 | <TouchSensor description='HAnimSite l_index_distal_tip'/> |
| 1879 | <Shape USE='HAnimSiteShape'/> |
| 1880 | </HAnimSite> |
| 1881 |
<!-- HAnimSite
hanim_l_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_dactylion_pt' name='l_dactylion_pt' translation='0.2056 0.6743 -0.0482'> |
| 1882 | <!-- HAnimSite visualization shape --> |
| 1883 | <TouchSensor description='HAnimSite l_dactylion'/> |
| 1884 | <Shape USE='HAnimSiteShape'/> |
| 1885 | </HAnimSite> |
| 1886 | </HAnimSegment> |
| 1887 | </HAnimJoint> |
| 1888 | </HAnimJoint> |
| 1889 | </HAnimJoint> |
| 1890 | </HAnimJoint> |
| 1891 |
<!-- HAnimJoint
hanim_l_middle0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_middle0 node: [from Stop_l_middle0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_middle0' center='0.1987 0.8029 -0.053' name='l_middle0'> |
| 1892 |
<!-- HAnimSegment
hanim_l_middle_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_metacarpal' name='l_middle_metacarpal'> |
| 1893 | <!-- <HAnimJoint name='l_middle0'/> visualization sphere within <HAnimSegment name='l_middle_metacarpal'/> --> |
| 1894 | <TouchSensor description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal'/> |
| 1895 | <Transform translation='0.1987 0.8029 -0.053'> |
| 1896 | <Shape USE='HAnimJointShape'/> |
| 1897 | </Transform> |
| 1898 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle0'/> to <HAnimJoint name='l_middle1'/> --> |
| 1899 | <Shape> |
| 1900 | <LineSet vertexCount='2' containerField='geometry'> |
| 1901 | <Coordinate point='0.1987 0.8029 -0.053 0.1987 0.7818 -0.053'/> |
| 1902 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1903 | </LineSet> |
| 1904 | </Shape> |
| 1905 | </HAnimSegment> |
| 1906 |
<!-- HAnimJoint
hanim_l_middle1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_middle1 node: [from Stop_l_middle1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_middle1' center='0.1987 0.7818 -0.053' name='l_middle1'> |
| 1907 |
<!-- HAnimSegment
hanim_l_middle_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_proximal' name='l_middle_proximal'> |
| 1908 | <!-- <HAnimJoint name='l_middle1'/> visualization sphere within <HAnimSegment name='l_middle_proximal'/> --> |
| 1909 | <TouchSensor description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal'/> |
| 1910 | <Transform translation='0.1987 0.7818 -0.053'> |
| 1911 | <Shape USE='HAnimJointShape'/> |
| 1912 | </Transform> |
| 1913 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle1'/> to <HAnimJoint name='l_middle2'/> --> |
| 1914 | <Shape> |
| 1915 | <LineSet vertexCount='2' containerField='geometry'> |
| 1916 | <Coordinate point='0.1987 0.7818 -0.053 0.2013 0.7273 -0.0503'/> |
| 1917 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1918 | </LineSet> |
| 1919 | </Shape> |
| 1920 | </HAnimSegment> |
| 1921 |
<!-- HAnimJoint
hanim_l_middle2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_middle2 node: [from Stop_l_middle2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_middle2' center='0.2013 0.7273 -0.0503' name='l_middle2'> |
| 1922 |
<!-- HAnimSegment
hanim_l_middle_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_middle' name='l_middle_middle'> |
| 1923 | <!-- <HAnimJoint name='l_middle2'/> visualization sphere within <HAnimSegment name='l_middle_middle'/> --> |
| 1924 | <TouchSensor description='HAnimJoint l_middle2, HAnimSegment l_middle_middle'/> |
| 1925 | <Transform translation='0.2013 0.7273 -0.0503'> |
| 1926 | <Shape USE='HAnimJointShape'/> |
| 1927 | </Transform> |
| 1928 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_middle2'/> to <HAnimJoint name='l_middle3'/> --> |
| 1929 | <Shape> |
| 1930 | <LineSet vertexCount='2' containerField='geometry'> |
| 1931 | <Coordinate point='0.2013 0.7273 -0.0503 0.2026 0.7011 -0.0494'/> |
| 1932 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1933 | </LineSet> |
| 1934 | </Shape> |
| 1935 | </HAnimSegment> |
| 1936 |
<!-- HAnimJoint
hanim_l_middle3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_middle3 node: [from Stop_l_middle3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_middle3' center='0.2026 0.7011 -0.0494' name='l_middle3'> |
| 1937 |
<!-- HAnimSegment
hanim_l_middle_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middle_distal' name='l_middle_distal'> |
| 1938 | <!-- <HAnimJoint name='l_middle3'/> visualization sphere within <HAnimSegment name='l_middle_distal'/> --> |
| 1939 | <TouchSensor description='HAnimJoint l_middle3, HAnimSegment l_middle_distal'/> |
| 1940 | <Transform translation='0.2026 0.7011 -0.0494'> |
| 1941 | <Shape USE='HAnimJointShape'/> |
| 1942 | </Transform> |
| 1943 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_middle3'/> to <HAnimSite name='l_middle_distal_tip'/> --> |
| 1944 | <Shape> |
| 1945 | <LineSet vertexCount='2' containerField='geometry'> |
| 1946 | <Coordinate point='0.2026 0.7011 -0.0494 0.208 0.6731 -0.0491'/> |
| 1947 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 1948 | </LineSet> |
| 1949 | </Shape> |
| 1950 |
<!-- HAnimSite
hanim_l_middle_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_middle_distal_tip' name='l_middle_distal_tip' translation='0.208 0.6731 -0.0491'> |
| 1951 | <!-- HAnimSite visualization shape --> |
| 1952 | <TouchSensor description='HAnimSite l_middle_distal_tip'/> |
| 1953 | <Shape USE='HAnimSiteShape'/> |
| 1954 | </HAnimSite> |
| 1955 | </HAnimSegment> |
| 1956 | </HAnimJoint> |
| 1957 | </HAnimJoint> |
| 1958 | </HAnimJoint> |
| 1959 | </HAnimJoint> |
| 1960 |
<!-- HAnimJoint
hanim_l_ring0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_ring0 node: [from Stop_l_ring0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_ring0' center='0.1956 0.8019 -0.0794' name='l_ring0'> |
| 1961 |
<!-- HAnimSegment
hanim_l_ring_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_metacarpal' name='l_ring_metacarpal'> |
| 1962 | <!-- <HAnimJoint name='l_ring0'/> visualization sphere within <HAnimSegment name='l_ring_metacarpal'/> --> |
| 1963 | <TouchSensor description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal'/> |
| 1964 | <Transform translation='0.1956 0.8019 -0.0794'> |
| 1965 | <Shape USE='HAnimJointShape'/> |
| 1966 | </Transform> |
| 1967 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring0'/> to <HAnimJoint name='l_ring1'/> --> |
| 1968 | <Shape> |
| 1969 | <LineSet vertexCount='2' containerField='geometry'> |
| 1970 | <Coordinate point='0.1956 0.8019 -0.0794 0.1956 0.7815 -0.0794'/> |
| 1971 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1972 | </LineSet> |
| 1973 | </Shape> |
| 1974 | </HAnimSegment> |
| 1975 |
<!-- HAnimJoint
hanim_l_ring1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_ring1 node: [from Stop_l_ring1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_ring1' center='0.1956 0.7815 -0.0794' name='l_ring1'> |
| 1976 |
<!-- HAnimSegment
hanim_l_ring_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_proximal' name='l_ring_proximal'> |
| 1977 | <!-- <HAnimJoint name='l_ring1'/> visualization sphere within <HAnimSegment name='l_ring_proximal'/> --> |
| 1978 | <TouchSensor description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal'/> |
| 1979 | <Transform translation='0.1956 0.7815 -0.0794'> |
| 1980 | <Shape USE='HAnimJointShape'/> |
| 1981 | </Transform> |
| 1982 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring1'/> to <HAnimJoint name='l_ring2'/> --> |
| 1983 | <Shape> |
| 1984 | <LineSet vertexCount='2' containerField='geometry'> |
| 1985 | <Coordinate point='0.1956 0.7815 -0.0794 0.1973 0.7287 -0.0777'/> |
| 1986 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 1987 | </LineSet> |
| 1988 | </Shape> |
| 1989 | </HAnimSegment> |
| 1990 |
<!-- HAnimJoint
hanim_l_ring2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_ring2 node: [from Stop_l_ring2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_ring2' center='0.1973 0.7287 -0.0777' name='l_ring2'> |
| 1991 |
<!-- HAnimSegment
hanim_l_ring_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_middle' name='l_ring_middle'> |
| 1992 | <!-- <HAnimJoint name='l_ring2'/> visualization sphere within <HAnimSegment name='l_ring_middle'/> --> |
| 1993 | <TouchSensor description='HAnimJoint l_ring2, HAnimSegment l_ring_middle'/> |
| 1994 | <Transform translation='0.1973 0.7287 -0.0777'> |
| 1995 | <Shape USE='HAnimJointShape'/> |
| 1996 | </Transform> |
| 1997 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_ring2'/> to <HAnimJoint name='l_ring3'/> --> |
| 1998 | <Shape> |
| 1999 | <LineSet vertexCount='2' containerField='geometry'> |
| 2000 | <Coordinate point='0.1973 0.7287 -0.0777 0.1983 0.7045 -0.0767'/> |
| 2001 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2002 | </LineSet> |
| 2003 | </Shape> |
| 2004 | </HAnimSegment> |
| 2005 |
<!-- HAnimJoint
hanim_l_ring3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_ring3 node: [from Stop_l_ring3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_ring3' center='0.1983 0.7045 -0.0767' name='l_ring3'> |
| 2006 |
<!-- HAnimSegment
hanim_l_ring_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_ring_distal' name='l_ring_distal'> |
| 2007 | <!-- <HAnimJoint name='l_ring3'/> visualization sphere within <HAnimSegment name='l_ring_distal'/> --> |
| 2008 | <TouchSensor description='HAnimJoint l_ring3, HAnimSegment l_ring_distal'/> |
| 2009 | <Transform translation='0.1983 0.7045 -0.0767'> |
| 2010 | <Shape USE='HAnimJointShape'/> |
| 2011 | </Transform> |
| 2012 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_ring3'/> to <HAnimSite name='l_ring_distal_tip'/> --> |
| 2013 | <Shape> |
| 2014 | <LineSet vertexCount='2' containerField='geometry'> |
| 2015 | <Coordinate point='0.1983 0.7045 -0.0767 0.2035 0.675 -0.0756'/> |
| 2016 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2017 | </LineSet> |
| 2018 | </Shape> |
| 2019 |
<!-- HAnimSite
hanim_l_ring_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_ring_distal_tip' name='l_ring_distal_tip' translation='0.2035 0.675 -0.0756'> |
| 2020 | <!-- HAnimSite visualization shape --> |
| 2021 | <TouchSensor description='HAnimSite l_ring_distal_tip'/> |
| 2022 | <Shape USE='HAnimSiteShape'/> |
| 2023 | </HAnimSite> |
| 2024 | </HAnimSegment> |
| 2025 | </HAnimJoint> |
| 2026 | </HAnimJoint> |
| 2027 | </HAnimJoint> |
| 2028 | </HAnimJoint> |
| 2029 |
<!-- HAnimJoint
hanim_l_pinky0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_pinky0 node: [from Stop_l_pinky0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_pinky0' center='0.1925 0.8066 -0.1036' name='l_pinky0'> |
| 2030 |
<!-- HAnimSegment
hanim_l_pinky_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_metacarpal' name='l_pinky_metacarpal'> |
| 2031 | <!-- <HAnimJoint name='l_pinky0'/> visualization sphere within <HAnimSegment name='l_pinky_metacarpal'/> --> |
| 2032 | <TouchSensor description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal'/> |
| 2033 | <Transform translation='0.1925 0.8066 -0.1036'> |
| 2034 | <Shape USE='HAnimJointShape'/> |
| 2035 | </Transform> |
| 2036 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky0'/> to <HAnimJoint name='l_pinky1'/> --> |
| 2037 | <Shape> |
| 2038 | <LineSet vertexCount='2' containerField='geometry'> |
| 2039 | <Coordinate point='0.1925 0.8066 -0.1036 0.1925 0.7866 -0.1036'/> |
| 2040 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2041 | </LineSet> |
| 2042 | </Shape> |
| 2043 | </HAnimSegment> |
| 2044 |
<!-- HAnimJoint
hanim_l_pinky1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_pinky1 node: [from Stop_l_pinky1_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_pinky1' center='0.1925 0.7866 -0.1036' name='l_pinky1'> |
| 2045 |
<!-- HAnimSegment
hanim_l_pinky_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_proximal' name='l_pinky_proximal'> |
| 2046 | <!-- <HAnimJoint name='l_pinky1'/> visualization sphere within <HAnimSegment name='l_pinky_proximal'/> --> |
| 2047 | <TouchSensor description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal'/> |
| 2048 | <Transform translation='0.1925 0.7866 -0.1036'> |
| 2049 | <Shape USE='HAnimJointShape'/> |
| 2050 | </Transform> |
| 2051 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky1'/> to <HAnimJoint name='l_pinky2'/> --> |
| 2052 | <Shape> |
| 2053 | <LineSet vertexCount='2' containerField='geometry'> |
| 2054 | <Coordinate point='0.1925 0.7866 -0.1036 0.1938 0.7452 -0.1024'/> |
| 2055 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2056 | </LineSet> |
| 2057 | </Shape> |
| 2058 | </HAnimSegment> |
| 2059 |
<!-- HAnimJoint
hanim_l_pinky2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_pinky2 node: [from Stop_l_pinky2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_pinky2' center='0.1938 0.7452 -0.1024' name='l_pinky2'> |
| 2060 |
<!-- HAnimSegment
hanim_l_pinky_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_middle' name='l_pinky_middle'> |
| 2061 | <!-- <HAnimJoint name='l_pinky2'/> visualization sphere within <HAnimSegment name='l_pinky_middle'/> --> |
| 2062 | <TouchSensor description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle'/> |
| 2063 | <Transform translation='0.1938 0.7452 -0.1024'> |
| 2064 | <Shape USE='HAnimJointShape'/> |
| 2065 | </Transform> |
| 2066 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='l_pinky2'/> to <HAnimJoint name='l_pinky3'/> --> |
| 2067 | <Shape> |
| 2068 | <LineSet vertexCount='2' containerField='geometry'> |
| 2069 | <Coordinate point='0.1938 0.7452 -0.1024 0.1948 0.7277 -0.1017'/> |
| 2070 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2071 | </LineSet> |
| 2072 | </Shape> |
| 2073 | </HAnimSegment> |
| 2074 |
<!-- HAnimJoint
hanim_l_pinky3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_l_pinky3 node: [from Stop_l_pinky3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_l_pinky3' center='0.1948 0.7277 -0.1017' name='l_pinky3'> |
| 2075 |
<!-- HAnimSegment
hanim_l_pinky_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_pinky_distal' name='l_pinky_distal'> |
| 2076 | <!-- <HAnimJoint name='l_pinky3'/> visualization sphere within <HAnimSegment name='l_pinky_distal'/> --> |
| 2077 | <TouchSensor description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal'/> |
| 2078 | <Transform translation='0.1948 0.7277 -0.1017'> |
| 2079 | <Shape USE='HAnimJointShape'/> |
| 2080 | </Transform> |
| 2081 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='l_pinky3'/> to <HAnimSite name='l_pinky_distal_tip'/> --> |
| 2082 | <Shape> |
| 2083 | <LineSet vertexCount='2' containerField='geometry'> |
| 2084 | <Coordinate point='0.1948 0.7277 -0.1017 0.2014 0.7009 -0.1012'/> |
| 2085 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2086 | </LineSet> |
| 2087 | </Shape> |
| 2088 |
<!-- HAnimSite
hanim_l_pinky_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_l_pinky_distal_tip' name='l_pinky_distal_tip' translation='0.2014 0.7009 -0.1012'> |
| 2089 | <!-- HAnimSite visualization shape --> |
| 2090 | <TouchSensor description='HAnimSite l_pinky_distal_tip'/> |
| 2091 | <Shape USE='HAnimSiteShape'/> |
| 2092 | </HAnimSite> |
| 2093 | </HAnimSegment> |
| 2094 | </HAnimJoint> |
| 2095 | </HAnimJoint> |
| 2096 | </HAnimJoint> |
| 2097 | </HAnimJoint> |
| 2098 | </HAnimJoint> |
| 2099 | </HAnimJoint> |
| 2100 | </HAnimJoint> |
| 2101 | </HAnimJoint> |
| 2102 | </HAnimJoint> |
| 2103 |
<!-- HAnimJoint
hanim_r_sternoclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_sternoclavicular node: [from Stop_r_sternoclavicular_RotationInterpolator.value_changed to rotation ] [from Stand_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Pitch_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Yaw_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Roll_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Walk_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Run_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Jump_r_sternoclavicular_RollInterpolator.value_changed to rotation ] [from Kick_r_sternoclavicular_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_sternoclavicular' center='-0.082 1.4488 -0.0353' name='r_sternoclavicular'> |
| 2104 |
<!-- HAnimSegment
hanim_r_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_clavicle' name='r_clavicle'> |
| 2105 | <!-- <HAnimJoint name='r_sternoclavicular'/> visualization sphere within <HAnimSegment name='r_clavicle'/> --> |
| 2106 | <TouchSensor description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle'/> |
| 2107 | <Transform translation='-0.082 1.4488 -0.0353'> |
| 2108 | <Shape USE='HAnimJointShape'/> |
| 2109 | </Transform> |
| 2110 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_sternoclavicular'/> to <HAnimJoint name='r_acromioclavicular'/> --> |
| 2111 | <Shape> |
| 2112 | <LineSet vertexCount='2' containerField='geometry'> |
| 2113 | <Coordinate point='-0.082 1.4488 -0.0353 -0.0962 1.4269 -0.0424'/> |
| 2114 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2115 | </LineSet> |
| 2116 | </Shape> |
| 2117 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_clavicale'/> --> |
| 2118 | <Shape> |
| 2119 | <LineSet vertexCount='2' containerField='geometry'> |
| 2120 | <Coordinate point='-0.082 1.4488 -0.0353 -0.0115 1.4943 0.04'/> |
| 2121 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2122 | </LineSet> |
| 2123 | </Shape> |
| 2124 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_acromion'/> --> |
| 2125 | <Shape> |
| 2126 | <LineSet vertexCount='2' containerField='geometry'> |
| 2127 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1905 1.4791 -0.0431'/> |
| 2128 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2129 | </LineSet> |
| 2130 | </Shape> |
| 2131 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_ant'/> --> |
| 2132 | <Shape> |
| 2133 | <LineSet vertexCount='2' containerField='geometry'> |
| 2134 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1626 1.4072 -0.0031'/> |
| 2135 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2136 | </LineSet> |
| 2137 | </Shape> |
| 2138 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_sternoclavicular'/> to <HAnimSite name='r_axilla_post'/> --> |
| 2139 | <Shape> |
| 2140 | <LineSet vertexCount='2' containerField='geometry'> |
| 2141 | <Coordinate point='-0.082 1.4488 -0.0353 -0.1603 1.4098 -0.0826'/> |
| 2142 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2143 | </LineSet> |
| 2144 | </Shape> |
| 2145 |
<!-- HAnimSite
hanim_r_clavicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_clavicale_pt' name='r_clavicale_pt' translation='-0.0115 1.4943 0.04'> |
| 2146 | <!-- HAnimSite visualization shape --> |
| 2147 | <TouchSensor description='HAnimSite r_clavicale'/> |
| 2148 | <Shape USE='HAnimSiteShape'/> |
| 2149 | </HAnimSite> |
| 2150 |
<!-- HAnimSite
hanim_r_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_acromion_pt' name='r_acromion_pt' translation='-0.1905 1.4791 -0.0431'> |
| 2151 | <!-- HAnimSite visualization shape --> |
| 2152 | <TouchSensor description='HAnimSite r_acromion'/> |
| 2153 | <Shape USE='HAnimSiteShape'/> |
| 2154 | </HAnimSite> |
| 2155 |
<!-- HAnimSite
hanim_r_axilla_ant_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_axilla_ant_pt' name='r_axilla_ant_pt' translation='-0.1626 1.4072 -0.0031'> |
| 2156 | <!-- HAnimSite visualization shape --> |
| 2157 | <TouchSensor description='HAnimSite r_axilla_ant'/> |
| 2158 | <Shape USE='HAnimSiteShape'/> |
| 2159 | </HAnimSite> |
| 2160 |
<!-- HAnimSite
hanim_r_axilla_post_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_axilla_post_pt' name='r_axilla_post_pt' translation='-0.1603 1.4098 -0.0826'> |
| 2161 | <!-- HAnimSite visualization shape --> |
| 2162 | <TouchSensor description='HAnimSite r_axilla_post'/> |
| 2163 | <Shape USE='HAnimSiteShape'/> |
| 2164 | </HAnimSite> |
| 2165 | </HAnimSegment> |
| 2166 |
<!-- HAnimJoint
hanim_r_acromioclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_acromioclavicular node: [from Stop_r_acromioclavicular_RotationInterpolator.value_changed to rotation ] [from Stand_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Pitch_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Yaw_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Roll_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Walk_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Run_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Jump_r_acromioclavicular_RollInterpolator.value_changed to rotation ] [from Kick_r_acromioclavicular_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_acromioclavicular' center='-0.0962 1.4269 -0.0424' name='r_acromioclavicular'> |
| 2167 |
<!-- HAnimSegment
hanim_r_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_scapula' name='r_scapula'> |
| 2168 | <!-- <HAnimJoint name='r_acromioclavicular'/> visualization sphere within <HAnimSegment name='r_scapula'/> --> |
| 2169 | <TouchSensor description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula'/> |
| 2170 | <Transform translation='-0.0962 1.4269 -0.0424'> |
| 2171 | <Shape USE='HAnimJointShape'/> |
| 2172 | </Transform> |
| 2173 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_acromioclavicular'/> to <HAnimJoint name='r_shoulder'/> --> |
| 2174 | <Shape> |
| 2175 | <LineSet vertexCount='2' containerField='geometry'> |
| 2176 | <Coordinate point='-0.0962 1.4269 -0.0424 -0.2029 1.4376 -0.0387'/> |
| 2177 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2178 | </LineSet> |
| 2179 | </Shape> |
| 2180 | </HAnimSegment> |
| 2181 |
<!-- HAnimJoint
hanim_r_shoulder is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_shoulder node: [from Stop_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Stand_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Pitches_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Yaws_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Rolls_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Walk_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Run_r_shoulder_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_shoulder_RotationInterpolator.value_changed to rotation ] [from Kick_r_shoulder_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_shoulder' center='-0.2029 1.4376 -0.0387' name='r_shoulder'> |
| 2182 |
<!-- HAnimSegment
hanim_r_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_upperarm' name='r_upperarm'> |
| 2183 | <!-- <HAnimJoint name='r_shoulder'/> visualization sphere within <HAnimSegment name='r_upperarm'/> --> |
| 2184 | <TouchSensor description='HAnimJoint r_shoulder, HAnimSegment r_upperarm'/> |
| 2185 | <Transform translation='-0.2029 1.4376 -0.0387'> |
| 2186 | <Shape USE='HAnimJointShape'/> |
| 2187 | </Transform> |
| 2188 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_shoulder'/> to <HAnimJoint name='r_elbow'/> --> |
| 2189 | <Shape> |
| 2190 | <LineSet vertexCount='2' containerField='geometry'> |
| 2191 | <Coordinate point='-0.2029 1.4376 -0.0387 -0.2014 1.1357 -0.0682'/> |
| 2192 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2193 | </LineSet> |
| 2194 | </Shape> |
| 2195 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_shoulder'/> to <HAnimSite name='r_humeral_lateral_epicn'/> --> |
| 2196 | <Shape> |
| 2197 | <LineSet vertexCount='2' containerField='geometry'> |
| 2198 | <Coordinate point='-0.2029 1.4376 -0.0387 -0.2224 1.1517 -0.1033'/> |
| 2199 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2200 | </LineSet> |
| 2201 | </Shape> |
| 2202 |
<!-- HAnimSite
hanim_r_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt' translation='-0.2224 1.1517 -0.1033'> |
| 2203 | <!-- HAnimSite visualization shape --> |
| 2204 | <TouchSensor description='HAnimSite r_humeral_lateral_epicn'/> |
| 2205 | <Shape USE='HAnimSiteShape'/> |
| 2206 | </HAnimSite> |
| 2207 | </HAnimSegment> |
| 2208 |
<!-- HAnimJoint
hanim_r_elbow is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_elbow node: [from Stop_r_elbow_RotationInterpolator.value_changed to rotation ] [from Stand_r_elbow_RotationInterpolator.value_changed to rotation ] [from Pitches_r_elbow_RotationInterpolator.value_changed to rotation ] [from Yaws_r_elbow_RotationInterpolator.value_changed to rotation ] [from Rolls_r_elbow_RotationInterpolator.value_changed to rotation ] [from Walk_r_elbow_RotationInterpolator.value_changed to rotation ] [from Run_r_elbow_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_elbow_RotationInterpolator.value_changed to rotation ] [from Kick_r_ForeArm_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_elbow' center='-0.2014 1.1357 -0.0682' name='r_elbow'> |
| 2209 |
<!-- HAnimSegment
hanim_r_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_forearm' name='r_forearm'> |
| 2210 | <!-- <HAnimJoint name='r_elbow'/> visualization sphere within <HAnimSegment name='r_forearm'/> --> |
| 2211 | <TouchSensor description='HAnimJoint r_elbow, HAnimSegment r_forearm'/> |
| 2212 | <Transform translation='-0.2014 1.1357 -0.0682'> |
| 2213 | <Shape USE='HAnimJointShape'/> |
| 2214 | </Transform> |
| 2215 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_elbow'/> to <HAnimJoint name='r_wrist'/> --> |
| 2216 | <Shape> |
| 2217 | <LineSet vertexCount='2' containerField='geometry'> |
| 2218 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1984 0.8663 -0.0583'/> |
| 2219 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2220 | </LineSet> |
| 2221 | </Shape> |
| 2222 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radial_styloid'/> --> |
| 2223 | <Shape> |
| 2224 | <LineSet vertexCount='2' containerField='geometry'> |
| 2225 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1884 0.8676 -0.036'/> |
| 2226 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2227 | </LineSet> |
| 2228 | </Shape> |
| 2229 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_olecranon'/> --> |
| 2230 | <Shape> |
| 2231 | <LineSet vertexCount='2' containerField='geometry'> |
| 2232 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.1907 1.1405 -0.1065'/> |
| 2233 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2234 | </LineSet> |
| 2235 | </Shape> |
| 2236 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_humeral_medial_epicn'/> --> |
| 2237 | <Shape> |
| 2238 | <LineSet vertexCount='2' containerField='geometry'> |
| 2239 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.168 1.1298 -0.1062'/> |
| 2240 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2241 | </LineSet> |
| 2242 | </Shape> |
| 2243 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_elbow'/> to <HAnimSite name='r_radiale'/> --> |
| 2244 | <Shape> |
| 2245 | <LineSet vertexCount='2' containerField='geometry'> |
| 2246 | <Coordinate point='-0.2014 1.1357 -0.0682 -0.213 1.1305 -0.1091'/> |
| 2247 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2248 | </LineSet> |
| 2249 | </Shape> |
| 2250 |
<!-- HAnimSite
hanim_r_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt' translation='-0.1884 0.8676 -0.036'> |
| 2251 | <!-- HAnimSite visualization shape --> |
| 2252 | <TouchSensor description='HAnimSite r_radial_styloid'/> |
| 2253 | <Shape USE='HAnimSiteShape'/> |
| 2254 | </HAnimSite> |
| 2255 |
<!-- HAnimSite
hanim_r_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_olecranon_pt' name='r_olecranon_pt' translation='-0.1907 1.1405 -0.1065'> |
| 2256 | <!-- HAnimSite visualization shape --> |
| 2257 | <TouchSensor description='HAnimSite r_olecranon'/> |
| 2258 | <Shape USE='HAnimSiteShape'/> |
| 2259 | </HAnimSite> |
| 2260 |
<!-- HAnimSite
hanim_r_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt' translation='-0.168 1.1298 -0.1062'> |
| 2261 | <!-- HAnimSite visualization shape --> |
| 2262 | <TouchSensor description='HAnimSite r_humeral_medial_epicn'/> |
| 2263 | <Shape USE='HAnimSiteShape'/> |
| 2264 | </HAnimSite> |
| 2265 |
<!-- HAnimSite
hanim_r_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_radiale_pt' name='r_radiale_pt' translation='-0.213 1.1305 -0.1091'> |
| 2266 | <!-- HAnimSite visualization shape --> |
| 2267 | <TouchSensor description='HAnimSite r_radiale'/> |
| 2268 | <Shape USE='HAnimSiteShape'/> |
| 2269 | </HAnimSite> |
| 2270 | </HAnimSegment> |
| 2271 |
<!-- HAnimJoint
hanim_r_wrist is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_wrist node: [from Stop_r_wrist_RotationInterpolator.value_changed to rotation ] [from Stand_r_wrist_RotationInterpolator.value_changed to rotation ] [from Pitches_r_wrist_RotationInterpolator.value_changed to rotation ] [from Yaws_r_wrist_RotationInterpolator.value_changed to rotation ] [from Rolls_r_wrist_RotationInterpolator.value_changed to rotation ] [from Walk_r_wrist_RotationInterpolator.value_changed to rotation ] [from Run_r_wrist_RotationInterpolator_Run.value_changed to rotation ] [from Jump_r_wrist_RotationInterpolator.value_changed to rotation ] [from Kick_r_wrist_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_wrist' center='-0.1984 0.8663 -0.0583' name='r_wrist'> |
| 2272 |
<!-- HAnimSegment
hanim_r_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hand' name='r_hand'> |
| 2273 | <!-- <HAnimJoint name='r_wrist'/> visualization sphere within <HAnimSegment name='r_hand'/> --> |
| 2274 | <TouchSensor description='HAnimJoint r_wrist, HAnimSegment r_hand'/> |
| 2275 | <Transform translation='-0.1984 0.8663 -0.0583'> |
| 2276 | <Shape USE='HAnimJointShape'/> |
| 2277 | </Transform> |
| 2278 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_thumb1'/> --> |
| 2279 | <Shape> |
| 2280 | <LineSet vertexCount='2' containerField='geometry'> |
| 2281 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1924 0.8472 -0.0534'/> |
| 2282 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2283 | </LineSet> |
| 2284 | </Shape> |
| 2285 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_index0'/> --> |
| 2286 | <Shape> |
| 2287 | <LineSet vertexCount='2' containerField='geometry'> |
| 2288 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1983 0.8024 -0.028'/> |
| 2289 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2290 | </LineSet> |
| 2291 | </Shape> |
| 2292 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_middle0'/> --> |
| 2293 | <Shape> |
| 2294 | <LineSet vertexCount='2' containerField='geometry'> |
| 2295 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1987 0.8029 -0.053'/> |
| 2296 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2297 | </LineSet> |
| 2298 | </Shape> |
| 2299 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_ring0'/> --> |
| 2300 | <Shape> |
| 2301 | <LineSet vertexCount='2' containerField='geometry'> |
| 2302 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1956 0.8019 -0.0794'/> |
| 2303 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2304 | </LineSet> |
| 2305 | </Shape> |
| 2306 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_wrist'/> to <HAnimJoint name='r_pinky0'/> --> |
| 2307 | <Shape> |
| 2308 | <LineSet vertexCount='2' containerField='geometry'> |
| 2309 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1925 0.8066 -0.1036'/> |
| 2310 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2311 | </LineSet> |
| 2312 | </Shape> |
| 2313 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha2'/> --> |
| 2314 | <Shape> |
| 2315 | <LineSet vertexCount='2' containerField='geometry'> |
| 2316 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1977 0.8169 -0.0177'/> |
| 2317 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2318 | </LineSet> |
| 2319 | </Shape> |
| 2320 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_ulnar_styloid'/> --> |
| 2321 | <Shape> |
| 2322 | <LineSet vertexCount='2' containerField='geometry'> |
| 2323 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.2117 0.8562 -0.0584'/> |
| 2324 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2325 | </LineSet> |
| 2326 | </Shape> |
| 2327 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_metacarpal_pha5'/> --> |
| 2328 | <Shape> |
| 2329 | <LineSet vertexCount='2' containerField='geometry'> |
| 2330 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.1929 0.789 -0.1064'/> |
| 2331 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2332 | </LineSet> |
| 2333 | </Shape> |
| 2334 | <!-- HAnimSite/Viewpoint visualization line segment from ancestor <HAnimJoint name='r_wrist'/> to <HAnimSite name='r_hand_front_view'/> --> |
| 2335 | <Shape> |
| 2336 | <LineSet vertexCount='2' containerField='geometry'> |
| 2337 | <Coordinate point='-0.1984 0.8663 -0.0583 -0.3 0.75 0.45'/> |
| 2338 | <ColorRGBA USE='HAnimSiteViewpointLineColorRGBA'/> |
| 2339 | </LineSet> |
| 2340 | </Shape> |
| 2341 |
<!-- HAnimSite
hanim_r_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt' translation='-0.1977 0.8169 -0.0177'> |
| 2342 | <!-- HAnimSite visualization shape --> |
| 2343 | <TouchSensor description='HAnimSite r_metacarpal_pha2'/> |
| 2344 | <Shape USE='HAnimSiteShape'/> |
| 2345 | </HAnimSite> |
| 2346 |
<!-- HAnimSite
hanim_r_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt' translation='-0.2117 0.8562 -0.0584'> |
| 2347 | <!-- HAnimSite visualization shape --> |
| 2348 | <TouchSensor description='HAnimSite r_ulnar_styloid'/> |
| 2349 | <Shape USE='HAnimSiteShape'/> |
| 2350 | </HAnimSite> |
| 2351 |
<!-- HAnimSite
hanim_r_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt' translation='-0.1929 0.789 -0.1064'> |
| 2352 | <!-- HAnimSite visualization shape --> |
| 2353 | <TouchSensor description='HAnimSite r_metacarpal_pha5'/> |
| 2354 | <Shape USE='HAnimSiteShape'/> |
| 2355 | </HAnimSite> |
| 2356 |
<!-- HAnimSite
hanim_r_hand_front_view is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_hand_front_view' name='r_hand_front_view' translation='-0.3 0.75 0.45'> |
| 2357 | <Viewpoint DEF='hanim_r_hand_front_viewpoint' centerOfRotation='0 0.7 0' description='right hand front' position='0 0 0'/> |
| 2358 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2359 | <Anchor description='HAnimSite Viewpoint hanim_r_hand_front_view' url=' "#hanim_r_hand_front_viewpoint" '> |
| 2360 | <LOD forceTransitions='true' range='0.04'> |
| 2361 | <WorldInfo info='"hide diamond when close"'/> |
| 2362 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2363 | </LOD> |
| 2364 | </Anchor> |
| 2365 | </HAnimSite> |
| 2366 | </HAnimSegment> |
| 2367 |
<!-- HAnimJoint
hanim_r_thumb1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_thumb1 node: [from Stop_r_thumb1_RotationInterpolator.value_changed to rotation ] [from Stand_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Pitch_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Yaw_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Roll_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Walk_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Run_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Jump_r_thumb1_PitchInterpolator.value_changed to rotation ] [from Kick_r_thumb1_PitchInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_thumb1' center='-0.1924 0.8472 -0.0534' name='r_thumb1'> |
| 2368 |
<!-- HAnimSegment
hanim_r_thumb_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_metacarpal' name='r_thumb_metacarpal'> |
| 2369 | <!-- <HAnimJoint name='r_thumb1'/> visualization sphere within <HAnimSegment name='r_thumb_metacarpal'/> --> |
| 2370 | <TouchSensor description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal'/> |
| 2371 | <Transform translation='-0.1924 0.8472 -0.0534'> |
| 2372 | <Shape USE='HAnimJointShape'/> |
| 2373 | </Transform> |
| 2374 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb1'/> to <HAnimJoint name='r_thumb2'/> --> |
| 2375 | <Shape> |
| 2376 | <LineSet vertexCount='2' containerField='geometry'> |
| 2377 | <Coordinate point='-0.1924 0.8472 -0.0534 -0.1951 0.8226 0.0246'/> |
| 2378 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2379 | </LineSet> |
| 2380 | </Shape> |
| 2381 | </HAnimSegment> |
| 2382 |
<!-- HAnimJoint
hanim_r_thumb2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_thumb2 node: [from Stop_r_thumb2_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_thumb2' center='-0.1951 0.8226 0.0246' name='r_thumb2'> |
| 2383 |
<!-- HAnimSegment
hanim_r_thumb_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_proximal' name='r_thumb_proximal'> |
| 2384 | <!-- <HAnimJoint name='r_thumb2'/> visualization sphere within <HAnimSegment name='r_thumb_proximal'/> --> |
| 2385 | <TouchSensor description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal'/> |
| 2386 | <Transform translation='-0.1951 0.8226 0.0246'> |
| 2387 | <Shape USE='HAnimJointShape'/> |
| 2388 | </Transform> |
| 2389 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_thumb2'/> to <HAnimJoint name='r_thumb3'/> --> |
| 2390 | <Shape> |
| 2391 | <LineSet vertexCount='2' containerField='geometry'> |
| 2392 | <Coordinate point='-0.1951 0.8226 0.0246 -0.1955 0.8159 0.0464'/> |
| 2393 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2394 | </LineSet> |
| 2395 | </Shape> |
| 2396 | </HAnimSegment> |
| 2397 |
<!-- HAnimJoint
hanim_r_thumb3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_thumb3 node: [from Stop_r_thumb3_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_thumb3' center='-0.1955 0.8159 0.0464' name='r_thumb3'> |
| 2398 |
<!-- HAnimSegment
hanim_r_thumb_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thumb_distal' name='r_thumb_distal'> |
| 2399 | <!-- <HAnimJoint name='r_thumb3'/> visualization sphere within <HAnimSegment name='r_thumb_distal'/> --> |
| 2400 | <TouchSensor description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal'/> |
| 2401 | <Transform translation='-0.1955 0.8159 0.0464'> |
| 2402 | <Shape USE='HAnimJointShape'/> |
| 2403 | </Transform> |
| 2404 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_thumb3'/> to <HAnimSite name='r_thumb_distal_tip'/> --> |
| 2405 | <Shape> |
| 2406 | <LineSet vertexCount='2' containerField='geometry'> |
| 2407 | <Coordinate point='-0.1955 0.8159 0.0464 -0.1869 0.809 0.082'/> |
| 2408 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2409 | </LineSet> |
| 2410 | </Shape> |
| 2411 |
<!-- HAnimSite
hanim_r_thumb_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_thumb_distal_tip' name='r_thumb_distal_tip' translation='-0.1869 0.809 0.082'> |
| 2412 | <!-- HAnimSite visualization shape --> |
| 2413 | <TouchSensor description='HAnimSite r_thumb_distal_tip'/> |
| 2414 | <Shape USE='HAnimSiteShape'/> |
| 2415 | </HAnimSite> |
| 2416 | </HAnimSegment> |
| 2417 | </HAnimJoint> |
| 2418 | </HAnimJoint> |
| 2419 | </HAnimJoint> |
| 2420 |
<!-- HAnimJoint
hanim_r_index0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_index0 node: [from Stop_r_index0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_index0' center='-0.1983 0.8024 -0.028' name='r_index0'> |
| 2421 |
<!-- HAnimSegment
hanim_r_index_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_metacarpal' name='r_index_metacarpal'> |
| 2422 | <!-- <HAnimJoint name='r_index0'/> visualization sphere within <HAnimSegment name='r_index_metacarpal'/> --> |
| 2423 | <TouchSensor description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal'/> |
| 2424 | <Transform translation='-0.1983 0.8024 -0.028'> |
| 2425 | <Shape USE='HAnimJointShape'/> |
| 2426 | </Transform> |
| 2427 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index0'/> to <HAnimJoint name='r_index1'/> --> |
| 2428 | <Shape> |
| 2429 | <LineSet vertexCount='2' containerField='geometry'> |
| 2430 | <Coordinate point='-0.1983 0.8024 -0.028 -0.1983 0.7815 -0.028'/> |
| 2431 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2432 | </LineSet> |
| 2433 | </Shape> |
| 2434 | </HAnimSegment> |
| 2435 |
<!-- HAnimJoint
hanim_r_index1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_index1 node: [from Stop_r_index1_RotationInterpolator.value_changed to rotation ] [from Stand_r_index1_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_index1' center='-0.1983 0.7815 -0.028' name='r_index1'> |
| 2436 |
<!-- HAnimSegment
hanim_r_index_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_proximal' name='r_index_proximal'> |
| 2437 | <!-- <HAnimJoint name='r_index1'/> visualization sphere within <HAnimSegment name='r_index_proximal'/> --> |
| 2438 | <TouchSensor description='HAnimJoint r_index1, HAnimSegment r_index_proximal'/> |
| 2439 | <Transform translation='-0.1983 0.7815 -0.028'> |
| 2440 | <Shape USE='HAnimJointShape'/> |
| 2441 | </Transform> |
| 2442 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index1'/> to <HAnimJoint name='r_index2'/> --> |
| 2443 | <Shape> |
| 2444 | <LineSet vertexCount='2' containerField='geometry'> |
| 2445 | <Coordinate point='-0.1983 0.7815 -0.028 -0.2017 0.7363 -0.0248'/> |
| 2446 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2447 | </LineSet> |
| 2448 | </Shape> |
| 2449 | </HAnimSegment> |
| 2450 |
<!-- HAnimJoint
hanim_r_index2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_index2 node: [from Stop_r_index2_RotationInterpolator.value_changed to rotation ] [from Stand_r_index2_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_index2' center='-0.2017 0.7363 -0.0248' name='r_index2'> |
| 2451 |
<!-- HAnimSegment
hanim_r_index_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_middle' name='r_index_middle'> |
| 2452 | <!-- <HAnimJoint name='r_index2'/> visualization sphere within <HAnimSegment name='r_index_middle'/> --> |
| 2453 | <TouchSensor description='HAnimJoint r_index2, HAnimSegment r_index_middle'/> |
| 2454 | <Transform translation='-0.2017 0.7363 -0.0248'> |
| 2455 | <Shape USE='HAnimJointShape'/> |
| 2456 | </Transform> |
| 2457 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_index2'/> to <HAnimJoint name='r_index3'/> --> |
| 2458 | <Shape> |
| 2459 | <LineSet vertexCount='2' containerField='geometry'> |
| 2460 | <Coordinate point='-0.2017 0.7363 -0.0248 -0.2028 0.7139 -0.0236'/> |
| 2461 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2462 | </LineSet> |
| 2463 | </Shape> |
| 2464 | </HAnimSegment> |
| 2465 |
<!-- HAnimJoint
hanim_r_index3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_index3 node: [from Stop_r_index3_RotationInterpolator.value_changed to rotation ] [from Stand_r_index3_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_index3' center='-0.2028 0.7139 -0.0236' name='r_index3'> |
| 2466 |
<!-- HAnimSegment
hanim_r_index_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_index_distal' name='r_index_distal'> |
| 2467 | <!-- <HAnimJoint name='r_index3'/> visualization sphere within <HAnimSegment name='r_index_distal'/> --> |
| 2468 | <TouchSensor description='HAnimJoint r_index3, HAnimSegment r_index_distal'/> |
| 2469 | <Transform translation='-0.2028 0.7139 -0.0236'> |
| 2470 | <Shape USE='HAnimJointShape'/> |
| 2471 | </Transform> |
| 2472 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_index_distal_tip'/> --> |
| 2473 | <Shape> |
| 2474 | <LineSet vertexCount='2' containerField='geometry'> |
| 2475 | <Coordinate point='-0.2028 0.7139 -0.0236 -0.198 0.6883 -0.018'/> |
| 2476 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2477 | </LineSet> |
| 2478 | </Shape> |
| 2479 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_index3'/> to <HAnimSite name='r_dactylion'/> --> |
| 2480 | <Shape> |
| 2481 | <LineSet vertexCount='2' containerField='geometry'> |
| 2482 | <Coordinate point='-0.2028 0.7139 -0.0236 -0.1941 0.6772 -0.0423'/> |
| 2483 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2484 | </LineSet> |
| 2485 | </Shape> |
| 2486 |
<!-- HAnimSite
hanim_r_index_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_index_distal_tip' name='r_index_distal_tip' translation='-0.198 0.6883 -0.018'> |
| 2487 | <!-- HAnimSite visualization shape --> |
| 2488 | <TouchSensor description='HAnimSite r_index_distal_tip'/> |
| 2489 | <Shape USE='HAnimSiteShape'/> |
| 2490 | </HAnimSite> |
| 2491 |
<!-- HAnimSite
hanim_r_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_dactylion_pt' name='r_dactylion_pt' translation='-0.1941 0.6772 -0.0423'> |
| 2492 | <!-- HAnimSite visualization shape --> |
| 2493 | <TouchSensor description='HAnimSite r_dactylion'/> |
| 2494 | <Shape USE='HAnimSiteShape'/> |
| 2495 | </HAnimSite> |
| 2496 | </HAnimSegment> |
| 2497 | </HAnimJoint> |
| 2498 | </HAnimJoint> |
| 2499 | </HAnimJoint> |
| 2500 | </HAnimJoint> |
| 2501 |
<!-- HAnimJoint
hanim_r_middle0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_middle0 node: [from Stop_r_middle0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_middle0' center='-0.1987 0.8029 -0.053' name='r_middle0'> |
| 2502 |
<!-- HAnimSegment
hanim_r_middle_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_metacarpal' name='r_middle_metacarpal'> |
| 2503 | <!-- <HAnimJoint name='r_middle0'/> visualization sphere within <HAnimSegment name='r_middle_metacarpal'/> --> |
| 2504 | <TouchSensor description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal'/> |
| 2505 | <Transform translation='-0.1987 0.8029 -0.053'> |
| 2506 | <Shape USE='HAnimJointShape'/> |
| 2507 | </Transform> |
| 2508 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle0'/> to <HAnimJoint name='r_middle1'/> --> |
| 2509 | <Shape> |
| 2510 | <LineSet vertexCount='2' containerField='geometry'> |
| 2511 | <Coordinate point='-0.1987 0.8029 -0.053 -0.1987 0.7818 -0.053'/> |
| 2512 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2513 | </LineSet> |
| 2514 | </Shape> |
| 2515 | </HAnimSegment> |
| 2516 |
<!-- HAnimJoint
hanim_r_middle1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_middle1 node: [from Stop_r_middle1_RotationInterpolator.value_changed to rotation ] [from Stand_r_index1_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_middle1' center='-0.1987 0.7818 -0.053' name='r_middle1'> |
| 2517 |
<!-- HAnimSegment
hanim_r_middle_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_proximal' name='r_middle_proximal'> |
| 2518 | <!-- <HAnimJoint name='r_middle1'/> visualization sphere within <HAnimSegment name='r_middle_proximal'/> --> |
| 2519 | <TouchSensor description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal'/> |
| 2520 | <Transform translation='-0.1987 0.7818 -0.053'> |
| 2521 | <Shape USE='HAnimJointShape'/> |
| 2522 | </Transform> |
| 2523 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle1'/> to <HAnimJoint name='r_middle2'/> --> |
| 2524 | <Shape> |
| 2525 | <LineSet vertexCount='2' containerField='geometry'> |
| 2526 | <Coordinate point='-0.1987 0.7818 -0.053 -0.2013 0.7273 -0.0503'/> |
| 2527 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2528 | </LineSet> |
| 2529 | </Shape> |
| 2530 | </HAnimSegment> |
| 2531 |
<!-- HAnimJoint
hanim_r_middle2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_middle2 node: [from Stop_r_middle2_RotationInterpolator.value_changed to rotation ] [from Stand_r_index2_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_middle2' center='-0.2013 0.7273 -0.0503' name='r_middle2'> |
| 2532 |
<!-- HAnimSegment
hanim_r_middle_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_middle' name='r_middle_middle'> |
| 2533 | <!-- <HAnimJoint name='r_middle2'/> visualization sphere within <HAnimSegment name='r_middle_middle'/> --> |
| 2534 | <TouchSensor description='HAnimJoint r_middle2, HAnimSegment r_middle_middle'/> |
| 2535 | <Transform translation='-0.2013 0.7273 -0.0503'> |
| 2536 | <Shape USE='HAnimJointShape'/> |
| 2537 | </Transform> |
| 2538 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_middle2'/> to <HAnimJoint name='r_middle3'/> --> |
| 2539 | <Shape> |
| 2540 | <LineSet vertexCount='2' containerField='geometry'> |
| 2541 | <Coordinate point='-0.2013 0.7273 -0.0503 -0.2026 0.7011 -0.0494'/> |
| 2542 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2543 | </LineSet> |
| 2544 | </Shape> |
| 2545 | </HAnimSegment> |
| 2546 |
<!-- HAnimJoint
hanim_r_middle3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_middle3 node: [from Stop_r_middle3_RotationInterpolator.value_changed to rotation ] [from Stand_r_index3_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_middle3' center='-0.2026 0.7011 -0.0494' name='r_middle3'> |
| 2547 |
<!-- HAnimSegment
hanim_r_middle_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middle_distal' name='r_middle_distal'> |
| 2548 | <!-- <HAnimJoint name='r_middle3'/> visualization sphere within <HAnimSegment name='r_middle_distal'/> --> |
| 2549 | <TouchSensor description='HAnimJoint r_middle3, HAnimSegment r_middle_distal'/> |
| 2550 | <Transform translation='-0.2026 0.7011 -0.0494'> |
| 2551 | <Shape USE='HAnimJointShape'/> |
| 2552 | </Transform> |
| 2553 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_middle3'/> to <HAnimSite name='r_middle_distal_tip'/> --> |
| 2554 | <Shape> |
| 2555 | <LineSet vertexCount='2' containerField='geometry'> |
| 2556 | <Coordinate point='-0.2026 0.7011 -0.0494 -0.1969 0.6758 -0.0427'/> |
| 2557 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2558 | </LineSet> |
| 2559 | </Shape> |
| 2560 |
<!-- HAnimSite
hanim_r_middle_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_middle_distal_tip' name='r_middle_distal_tip' translation='-0.1969 0.6758 -0.0427'> |
| 2561 | <!-- HAnimSite visualization shape --> |
| 2562 | <TouchSensor description='HAnimSite r_middle_distal_tip'/> |
| 2563 | <Shape USE='HAnimSiteShape'/> |
| 2564 | </HAnimSite> |
| 2565 | </HAnimSegment> |
| 2566 | </HAnimJoint> |
| 2567 | </HAnimJoint> |
| 2568 | </HAnimJoint> |
| 2569 | </HAnimJoint> |
| 2570 |
<!-- HAnimJoint
hanim_r_ring0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_ring0 node: [from Stop_r_ring0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_ring0' center='-0.1956 0.8019 -0.0794' name='r_ring0'> |
| 2571 |
<!-- HAnimSegment
hanim_r_ring_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_metacarpal' name='r_ring_metacarpal'> |
| 2572 | <!-- <HAnimJoint name='r_ring0'/> visualization sphere within <HAnimSegment name='r_ring_metacarpal'/> --> |
| 2573 | <TouchSensor description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal'/> |
| 2574 | <Transform translation='-0.1956 0.8019 -0.0794'> |
| 2575 | <Shape USE='HAnimJointShape'/> |
| 2576 | </Transform> |
| 2577 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring0'/> to <HAnimJoint name='r_ring1'/> --> |
| 2578 | <Shape> |
| 2579 | <LineSet vertexCount='2' containerField='geometry'> |
| 2580 | <Coordinate point='-0.1956 0.8019 -0.0794 -0.1956 0.7815 -0.0794'/> |
| 2581 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2582 | </LineSet> |
| 2583 | </Shape> |
| 2584 | </HAnimSegment> |
| 2585 |
<!-- HAnimJoint
hanim_r_ring1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_ring1 node: [from Stop_r_ring1_RotationInterpolator.value_changed to rotation ] [from Stand_r_index1_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_ring1' center='-0.1956 0.7815 -0.0794' name='r_ring1'> |
| 2586 |
<!-- HAnimSegment
hanim_r_ring_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_proximal' name='r_ring_proximal'> |
| 2587 | <!-- <HAnimJoint name='r_ring1'/> visualization sphere within <HAnimSegment name='r_ring_proximal'/> --> |
| 2588 | <TouchSensor description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal'/> |
| 2589 | <Transform translation='-0.1956 0.7815 -0.0794'> |
| 2590 | <Shape USE='HAnimJointShape'/> |
| 2591 | </Transform> |
| 2592 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring1'/> to <HAnimJoint name='r_ring2'/> --> |
| 2593 | <Shape> |
| 2594 | <LineSet vertexCount='2' containerField='geometry'> |
| 2595 | <Coordinate point='-0.1956 0.7815 -0.0794 -0.1973 0.7287 -0.0777'/> |
| 2596 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2597 | </LineSet> |
| 2598 | </Shape> |
| 2599 | </HAnimSegment> |
| 2600 |
<!-- HAnimJoint
hanim_r_ring2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_ring2 node: [from Stop_r_ring2_RotationInterpolator.value_changed to rotation ] [from Stand_r_index2_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_ring2' center='-0.1973 0.7287 -0.0777' name='r_ring2'> |
| 2601 |
<!-- HAnimSegment
hanim_r_ring_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_middle' name='r_ring_middle'> |
| 2602 | <!-- <HAnimJoint name='r_ring2'/> visualization sphere within <HAnimSegment name='r_ring_middle'/> --> |
| 2603 | <TouchSensor description='HAnimJoint r_ring2, HAnimSegment r_ring_middle'/> |
| 2604 | <Transform translation='-0.1973 0.7287 -0.0777'> |
| 2605 | <Shape USE='HAnimJointShape'/> |
| 2606 | </Transform> |
| 2607 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_ring2'/> to <HAnimJoint name='r_ring3'/> --> |
| 2608 | <Shape> |
| 2609 | <LineSet vertexCount='2' containerField='geometry'> |
| 2610 | <Coordinate point='-0.1973 0.7287 -0.0777 -0.1983 0.7045 -0.0767'/> |
| 2611 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2612 | </LineSet> |
| 2613 | </Shape> |
| 2614 | </HAnimSegment> |
| 2615 |
<!-- HAnimJoint
hanim_r_ring3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_ring3 node: [from Stop_r_ring3_RotationInterpolator.value_changed to rotation ] [from Stand_r_index3_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_ring3' center='-0.1983 0.7045 -0.0767' name='r_ring3'> |
| 2616 |
<!-- HAnimSegment
hanim_r_ring_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_ring_distal' name='r_ring_distal'> |
| 2617 | <!-- <HAnimJoint name='r_ring3'/> visualization sphere within <HAnimSegment name='r_ring_distal'/> --> |
| 2618 | <TouchSensor description='HAnimJoint r_ring3, HAnimSegment r_ring_distal'/> |
| 2619 | <Transform translation='-0.1983 0.7045 -0.0767'> |
| 2620 | <Shape USE='HAnimJointShape'/> |
| 2621 | </Transform> |
| 2622 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_ring3'/> to <HAnimSite name='r_ring_distal_tip'/> --> |
| 2623 | <Shape> |
| 2624 | <LineSet vertexCount='2' containerField='geometry'> |
| 2625 | <Coordinate point='-0.1983 0.7045 -0.0767 -0.1934 0.6778 -0.0693'/> |
| 2626 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2627 | </LineSet> |
| 2628 | </Shape> |
| 2629 |
<!-- HAnimSite
hanim_r_ring_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_ring_distal_tip' name='r_ring_distal_tip' translation='-0.1934 0.6778 -0.0693'> |
| 2630 | <!-- HAnimSite visualization shape --> |
| 2631 | <TouchSensor description='HAnimSite r_ring_distal_tip'/> |
| 2632 | <Shape USE='HAnimSiteShape'/> |
| 2633 | </HAnimSite> |
| 2634 | </HAnimSegment> |
| 2635 | </HAnimJoint> |
| 2636 | </HAnimJoint> |
| 2637 | </HAnimJoint> |
| 2638 | </HAnimJoint> |
| 2639 |
<!-- HAnimJoint
hanim_r_pinky0 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_pinky0 node: [from Stop_r_pinky0_RotationInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_pinky0' center='-0.1925 0.8066 -0.1036' name='r_pinky0'> |
| 2640 |
<!-- HAnimSegment
hanim_r_pinky_metacarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_metacarpal' name='r_pinky_metacarpal'> |
| 2641 | <!-- <HAnimJoint name='r_pinky0'/> visualization sphere within <HAnimSegment name='r_pinky_metacarpal'/> --> |
| 2642 | <TouchSensor description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal'/> |
| 2643 | <Transform translation='-0.1925 0.8066 -0.1036'> |
| 2644 | <Shape USE='HAnimJointShape'/> |
| 2645 | </Transform> |
| 2646 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky0'/> to <HAnimJoint name='r_pinky1'/> --> |
| 2647 | <Shape> |
| 2648 | <LineSet vertexCount='2' containerField='geometry'> |
| 2649 | <Coordinate point='-0.1925 0.8066 -0.1036 -0.1925 0.7866 -0.1036'/> |
| 2650 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2651 | </LineSet> |
| 2652 | </Shape> |
| 2653 | </HAnimSegment> |
| 2654 |
<!-- HAnimJoint
hanim_r_pinky1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_pinky1 node: [from Stop_r_pinky1_RotationInterpolator.value_changed to rotation ] [from Stand_r_index1_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_pinky1' center='-0.1925 0.7866 -0.1036' name='r_pinky1'> |
| 2655 |
<!-- HAnimSegment
hanim_r_pinky_proximal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_proximal' name='r_pinky_proximal'> |
| 2656 | <!-- <HAnimJoint name='r_pinky1'/> visualization sphere within <HAnimSegment name='r_pinky_proximal'/> --> |
| 2657 | <TouchSensor description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal'/> |
| 2658 | <Transform translation='-0.1925 0.7866 -0.1036'> |
| 2659 | <Shape USE='HAnimJointShape'/> |
| 2660 | </Transform> |
| 2661 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky1'/> to <HAnimJoint name='r_pinky2'/> --> |
| 2662 | <Shape> |
| 2663 | <LineSet vertexCount='2' containerField='geometry'> |
| 2664 | <Coordinate point='-0.1925 0.7866 -0.1036 -0.1938 0.7452 -0.1024'/> |
| 2665 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2666 | </LineSet> |
| 2667 | </Shape> |
| 2668 | </HAnimSegment> |
| 2669 |
<!-- HAnimJoint
hanim_r_pinky2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_pinky2 node: [from Stop_r_pinky2_RotationInterpolator.value_changed to rotation ] [from Stand_r_index2_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_pinky2' center='-0.1938 0.7452 -0.1024' name='r_pinky2'> |
| 2670 |
<!-- HAnimSegment
hanim_r_pinky_middle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_middle' name='r_pinky_middle'> |
| 2671 | <!-- <HAnimJoint name='r_pinky2'/> visualization sphere within <HAnimSegment name='r_pinky_middle'/> --> |
| 2672 | <TouchSensor description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle'/> |
| 2673 | <Transform translation='-0.1938 0.7452 -0.1024'> |
| 2674 | <Shape USE='HAnimJointShape'/> |
| 2675 | </Transform> |
| 2676 | <!-- HAnimSegment visualization line segment from parent <HAnimJoint name='r_pinky2'/> to <HAnimJoint name='r_pinky3'/> --> |
| 2677 | <Shape> |
| 2678 | <LineSet vertexCount='2' containerField='geometry'> |
| 2679 | <Coordinate point='-0.1938 0.7452 -0.1024 -0.1948 0.7277 -0.1017'/> |
| 2680 | <ColorRGBA USE='HAnimSegmentLineColorRGBA'/> |
| 2681 | </LineSet> |
| 2682 | </Shape> |
| 2683 | </HAnimSegment> |
| 2684 |
<!-- HAnimJoint
hanim_r_pinky3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for hanim_r_pinky3 node: [from Stop_r_pinky3_RotationInterpolator.value_changed to rotation ] [from Stand_r_index3_RollInterpolator.value_changed to rotation ] --> <HAnimJoint DEF='hanim_r_pinky3' center='-0.1948 0.7277 -0.1017' name='r_pinky3'> |
| 2685 |
<!-- HAnimSegment
hanim_r_pinky_distal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_pinky_distal' name='r_pinky_distal'> |
| 2686 | <!-- <HAnimJoint name='r_pinky3'/> visualization sphere within <HAnimSegment name='r_pinky_distal'/> --> |
| 2687 | <TouchSensor description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal'/> |
| 2688 | <Transform translation='-0.1948 0.7277 -0.1017'> |
| 2689 | <Shape USE='HAnimJointShape'/> |
| 2690 | </Transform> |
| 2691 | <!-- HAnimSite visualization line segment from ancestor <HAnimJoint name='r_pinky3'/> to <HAnimSite name='r_pinky_distal_tip'/> --> |
| 2692 | <Shape> |
| 2693 | <LineSet vertexCount='2' containerField='geometry'> |
| 2694 | <Coordinate point='-0.1948 0.7277 -0.1017 -0.1938 0.7035 -0.0949'/> |
| 2695 | <ColorRGBA USE='HAnimSiteLineColorRGBA'/> |
| 2696 | </LineSet> |
| 2697 | </Shape> |
| 2698 |
<!-- HAnimSite
hanim_r_pinky_distal_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='hanim_r_pinky_distal_tip' name='r_pinky_distal_tip' translation='-0.1938 0.7035 -0.0949'> |
| 2699 | <!-- HAnimSite visualization shape --> |
| 2700 | <TouchSensor description='HAnimSite r_pinky_distal_tip'/> |
| 2701 | <Shape USE='HAnimSiteShape'/> |
| 2702 | </HAnimSite> |
| 2703 | </HAnimSegment> |
| 2704 | </HAnimJoint> |
| 2705 | </HAnimJoint> |
| 2706 | </HAnimJoint> |
| 2707 | </HAnimJoint> |
| 2708 | </HAnimJoint> |
| 2709 | </HAnimJoint> |
| 2710 | </HAnimJoint> |
| 2711 | </HAnimJoint> |
| 2712 | </HAnimJoint> |
| 2713 | </HAnimJoint> |
| 2714 | </HAnimJoint> |
| 2715 | </HAnimJoint> |
| 2716 | </HAnimJoint> |
| 2717 | </HAnimJoint> |
| 2718 | </HAnimJoint> |
| 2719 | </HAnimJoint> |
| 2720 | </HAnimJoint> |
| 2721 | </HAnimJoint> |
| 2722 | </HAnimJoint> |
| 2723 | </HAnimJoint> |
| 2724 | </HAnimJoint> |
| 2725 | </HAnimJoint> |
| 2726 | </HAnimJoint> |
| 2727 | </HAnimJoint> |
| 2728 | </HAnimJoint> |
| 2729 | </HAnimJoint> |
| 2730 | </HAnimJoint> |
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> |
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> |
| 2733 | <HAnimSite DEF='hanim_l_inclined_view' containerField='viewpoints' name='l_inclined_view' rotation='-0.113 0.993 0.0347 0.671' translation='1.62 1.05 2.06'> |
| 2734 | <Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/> |
| 2735 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2736 | <Anchor description='HAnimSite Viewpoint hanim_l_inclined_view' url=' "#hanim_l_inclined_viewpoint" '> |
| 2737 | <LOD forceTransitions='true' range='0.04'> |
| 2738 | <WorldInfo info='"hide diamond when close"'/> |
| 2739 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2740 | </LOD> |
| 2741 | </Anchor> |
| 2742 | </HAnimSite> |
| 2743 | <HAnimSite DEF='hanim_r_inclined_view' containerField='viewpoints' name='r_inclined_view' rotation='-0.113 -0.993 0.0347 0.671' translation='-1.62 1.05 2.06'> |
| 2744 | <Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/> |
| 2745 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2746 | <Anchor description='HAnimSite Viewpoint hanim_r_inclined_view' url=' "#hanim_r_inclined_viewpoint" '> |
| 2747 | <LOD forceTransitions='true' range='0.04'> |
| 2748 | <WorldInfo info='"hide diamond when close"'/> |
| 2749 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2750 | </LOD> |
| 2751 | </Anchor> |
| 2752 | </HAnimSite> |
| 2753 | <HAnimSite DEF='hanim_front_view' containerField='viewpoints' name='front_view' translation='0 0.85 2.58'> |
| 2754 | <Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/> |
| 2755 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2756 | <Anchor description='HAnimSite Viewpoint hanim_front_view' url=' "#hanim_front_viewpoint" '> |
| 2757 | <LOD forceTransitions='true' range='0.04'> |
| 2758 | <WorldInfo info='"hide diamond when close"'/> |
| 2759 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2760 | </LOD> |
| 2761 | </Anchor> |
| 2762 | </HAnimSite> |
| 2763 | <HAnimSite DEF='hanim_back_view' containerField='viewpoints' name='back_view' rotation='0 1 0 3.14' translation='0 0.85 -2.58'> |
| 2764 | <Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/> |
| 2765 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2766 | <Anchor description='HAnimSite Viewpoint hanim_back_view' url=' "#hanim_back_viewpoint" '> |
| 2767 | <LOD forceTransitions='true' range='0.04'> |
| 2768 | <WorldInfo info='"hide diamond when close"'/> |
| 2769 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2770 | </LOD> |
| 2771 | </Anchor> |
| 2772 | </HAnimSite> |
| 2773 | <HAnimSite DEF='hanim_l_side_view' containerField='viewpoints' name='l_side_view' rotation='0 1 0 1.5708' translation='2.6 0.854 0'> |
| 2774 | <Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/> |
| 2775 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2776 | <Anchor description='HAnimSite Viewpoint hanim_l_side_view' url=' "#hanim_l_side_viewpoint" '> |
| 2777 | <LOD forceTransitions='true' range='0.04'> |
| 2778 | <WorldInfo info='"hide diamond when close"'/> |
| 2779 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2780 | </LOD> |
| 2781 | </Anchor> |
| 2782 | </HAnimSite> |
| 2783 | <HAnimSite DEF='hanim_Top_view' containerField='viewpoints' name='Top_view' rotation='1 0 0 -1.57' translation='0 3.5 0'> |
| 2784 | <Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/> |
| 2785 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2786 | <Anchor description='HAnimSite Viewpoint hanim_Top_view' url=' "#hanim_Top_viewpoint" '> |
| 2787 | <LOD forceTransitions='true' range='0.04'> |
| 2788 | <WorldInfo info='"hide diamond when close"'/> |
| 2789 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2790 | </LOD> |
| 2791 | </Anchor> |
| 2792 | </HAnimSite> |
| 2793 | <HAnimSite DEF='hanim_front_close_view' containerField='viewpoints' name='front_close_view' translation='0 0.854 1.575'> |
| 2794 | <Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/> |
| 2795 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2796 | <Anchor description='HAnimSite Viewpoint hanim_front_close_view' url=' "#hanim_front_close_viewpoint" '> |
| 2797 | <LOD forceTransitions='true' range='0.04'> |
| 2798 | <WorldInfo info='"hide diamond when close"'/> |
| 2799 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2800 | </LOD> |
| 2801 | </Anchor> |
| 2802 | </HAnimSite> |
| 2803 | <HAnimSite DEF='hanim_side_close_view' containerField='viewpoints' name='side_close_view' rotation='0 1 0 1.5708' translation='1.56 0.854 0'> |
| 2804 | <Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/> |
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2806 | <Anchor description='HAnimSite Viewpoint hanim_side_close_view' url=' "#hanim_side_close_viewpoint" '> |
| 2807 | <LOD forceTransitions='true' range='0.04'> |
| 2808 | <WorldInfo info='"hide diamond when close"'/> |
| 2809 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2810 | </LOD> |
| 2811 | </Anchor> |
| 2812 | </HAnimSite> |
| 2813 | <HAnimSite DEF='hanim_head_front_close_view' containerField='viewpoints' name='head_front_close_view' translation='0 1.5 1'> |
| 2814 | <Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/> |
| 2815 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2816 | <Anchor description='HAnimSite Viewpoint hanim_head_front_close_view' url=' "#hanim_head_front_close_viewpoint" '> |
| 2817 | <LOD forceTransitions='true' range='0.04'> |
| 2818 | <WorldInfo info='"hide diamond when close"'/> |
| 2819 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2820 | </LOD> |
| 2821 | </Anchor> |
| 2822 | </HAnimSite> |
| 2823 | <HAnimSite DEF='hanim_chest_front_close_view' containerField='viewpoints' name='chest_front_close_view' translation='0 1.2 1'> |
| 2824 | <Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/> |
| 2825 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2826 | <Anchor description='HAnimSite Viewpoint hanim_chest_front_close_view' url=' "#hanim_chest_front_close_viewpoint" '> |
| 2827 | <LOD forceTransitions='true' range='0.04'> |
| 2828 | <WorldInfo info='"hide diamond when close"'/> |
| 2829 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2830 | </LOD> |
| 2831 | </Anchor> |
| 2832 | </HAnimSite> |
| 2833 | <HAnimSite DEF='hanim_pelvis_front_close_view' containerField='viewpoints' name='pelvis_front_close_view' translation='0 0.8 1'> |
| 2834 | <Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/> |
| 2835 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2836 | <Anchor description='HAnimSite Viewpoint hanim_pelvis_front_close_view' url=' "#hanim_pelvis_front_close_viewpoint" '> |
| 2837 | <LOD forceTransitions='true' range='0.04'> |
| 2838 | <WorldInfo info='"hide diamond when close"'/> |
| 2839 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2840 | </LOD> |
| 2841 | </Anchor> |
| 2842 | </HAnimSite> |
| 2843 | <HAnimSite DEF='hanim_knees_front_close_view' containerField='viewpoints' name='knees_front_close_view' translation='0 0.4 1'> |
| 2844 | <Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/> |
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2846 | <Anchor description='HAnimSite Viewpoint hanim_knees_front_close_view' url=' "#hanim_knees_front_close_viewpoint" '> |
| 2847 | <LOD forceTransitions='true' range='0.04'> |
| 2848 | <WorldInfo info='"hide diamond when close"'/> |
| 2849 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2850 | </LOD> |
| 2851 | </Anchor> |
| 2852 | </HAnimSite> |
| 2853 | <HAnimSite DEF='hanim_feet_front_close_view' containerField='viewpoints' name='feet_front_close_view' translation='0 0 1'> |
| 2854 | <Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/> |
| 2855 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2856 | <Anchor description='HAnimSite Viewpoint hanim_feet_front_close_view' url=' "#hanim_feet_front_close_viewpoint" '> |
| 2857 | <LOD forceTransitions='true' range='0.04'> |
| 2858 | <WorldInfo info='"hide diamond when close"'/> |
| 2859 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2860 | </LOD> |
| 2861 | </Anchor> |
| 2862 | </HAnimSite> |
| 2863 | <HAnimSite DEF='hanim_eye_level_view' containerField='viewpoints' name='eye_level_view' translation='0 1.6332 0.0502'> |
| 2864 | <Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> |
| 2865 | <!-- HAnimSite/Viewpoint visualization shape --> |
| 2866 | <Anchor description='HAnimSite Viewpoint hanim_eye_level_view' url=' "#hanim_eye_level_viewpoint" '> |
| 2867 | <LOD forceTransitions='true' range='0.04'> |
| 2868 | <WorldInfo info='"hide diamond when close"'/> |
| 2869 | <Shape USE='HAnimSiteViewpointShape'/> |
| 2870 | </LOD> |
| 2871 | </Anchor> |
| 2872 | </HAnimSite> |
| 2873 | <HAnimJoint USE='hanim_humanoid_root' containerField='joints'/> |
| 2874 | <HAnimJoint USE='hanim_sacroiliac' containerField='joints'/> |
| 2875 | <HAnimJoint USE='hanim_vl5' containerField='joints'/> |
| 2876 | <HAnimJoint USE='hanim_vl4' containerField='joints'/> |
| 2877 | <HAnimJoint USE='hanim_vl3' containerField='joints'/> |
| 2878 | <HAnimJoint USE='hanim_vl2' containerField='joints'/> |
| 2879 | <HAnimJoint USE='hanim_vl1' containerField='joints'/> |
| 2880 | <HAnimJoint USE='hanim_vt12' containerField='joints'/> |
| 2881 | <HAnimJoint USE='hanim_vt11' containerField='joints'/> |
| 2882 | <HAnimJoint USE='hanim_vt10' containerField='joints'/> |
| 2883 | <HAnimJoint USE='hanim_vt9' containerField='joints'/> |
| 2884 | <HAnimJoint USE='hanim_vt8' containerField='joints'/> |
| 2885 | <HAnimJoint USE='hanim_vt7' containerField='joints'/> |
| 2886 | <HAnimJoint USE='hanim_vt6' containerField='joints'/> |
| 2887 | <HAnimJoint USE='hanim_vt5' containerField='joints'/> |
| 2888 | <HAnimJoint USE='hanim_vt4' containerField='joints'/> |
| 2889 | <HAnimJoint USE='hanim_vt3' containerField='joints'/> |
| 2890 | <HAnimJoint USE='hanim_vt2' containerField='joints'/> |
| 2891 | <HAnimJoint USE='hanim_vt1' containerField='joints'/> |
| 2892 | <HAnimJoint USE='hanim_vc7' containerField='joints'/> |
| 2893 | <HAnimJoint USE='hanim_vc6' containerField='joints'/> |
| 2894 | <HAnimJoint USE='hanim_vc5' containerField='joints'/> |
| 2895 | <HAnimJoint USE='hanim_vc4' containerField='joints'/> |
| 2896 | <HAnimJoint USE='hanim_vc3' containerField='joints'/> |
| 2897 | <HAnimJoint USE='hanim_vc2' containerField='joints'/> |
| 2898 | <HAnimJoint USE='hanim_vc1' containerField='joints'/> |
| 2899 | <HAnimJoint USE='hanim_skullbase' containerField='joints'/> |
| 2900 | <HAnimJoint USE='hanim_temporomandibular' containerField='joints'/> |
| 2901 | <HAnimJoint USE='hanim_l_acromioclavicular' containerField='joints'/> |
| 2902 | <HAnimJoint USE='hanim_r_acromioclavicular' containerField='joints'/> |
| 2903 | <HAnimJoint USE='hanim_l_ankle' containerField='joints'/> |
| 2904 | <HAnimJoint USE='hanim_r_ankle' containerField='joints'/> |
| 2905 | <HAnimJoint USE='hanim_l_elbow' containerField='joints'/> |
| 2906 | <HAnimJoint USE='hanim_r_elbow' containerField='joints'/> |
| 2907 | <HAnimJoint USE='hanim_l_eyeball_joint' containerField='joints'/> |
| 2908 | <HAnimJoint USE='hanim_r_eyeball_joint' containerField='joints'/> |
| 2909 | <HAnimJoint USE='hanim_l_eyebrow_joint' containerField='joints'/> |
| 2910 | <HAnimJoint USE='hanim_r_eyebrow_joint' containerField='joints'/> |
| 2911 | <HAnimJoint USE='hanim_l_eyelid_joint' containerField='joints'/> |
| 2912 | <HAnimJoint USE='hanim_r_eyelid_joint' containerField='joints'/> |
| 2913 | <HAnimJoint USE='hanim_l_hip' containerField='joints'/> |
| 2914 | <HAnimJoint USE='hanim_r_hip' containerField='joints'/> |
| 2915 | <HAnimJoint USE='hanim_l_index0' containerField='joints'/> |
| 2916 | <HAnimJoint USE='hanim_r_index0' containerField='joints'/> |
| 2917 | <HAnimJoint USE='hanim_l_index1' containerField='joints'/> |
| 2918 | <HAnimJoint USE='hanim_r_index1' containerField='joints'/> |
| 2919 | <HAnimJoint USE='hanim_l_index2' containerField='joints'/> |
| 2920 | <HAnimJoint USE='hanim_r_index2' containerField='joints'/> |
| 2921 | <HAnimJoint USE='hanim_l_index3' containerField='joints'/> |
| 2922 | <HAnimJoint USE='hanim_r_index3' containerField='joints'/> |
| 2923 | <HAnimJoint USE='hanim_l_knee' containerField='joints'/> |
| 2924 | <HAnimJoint USE='hanim_r_knee' containerField='joints'/> |
| 2925 | <HAnimJoint USE='hanim_l_metatarsal' containerField='joints'/> |
| 2926 | <HAnimJoint USE='hanim_r_metatarsal' containerField='joints'/> |
| 2927 | <HAnimJoint USE='hanim_l_middle0' containerField='joints'/> |
| 2928 | <HAnimJoint USE='hanim_r_middle0' containerField='joints'/> |
| 2929 | <HAnimJoint USE='hanim_l_middle1' containerField='joints'/> |
| 2930 | <HAnimJoint USE='hanim_r_middle1' containerField='joints'/> |
| 2931 | <HAnimJoint USE='hanim_l_middle2' containerField='joints'/> |
| 2932 | <HAnimJoint USE='hanim_r_middle2' containerField='joints'/> |
| 2933 | <HAnimJoint USE='hanim_l_middle3' containerField='joints'/> |
| 2934 | <HAnimJoint USE='hanim_r_middle3' containerField='joints'/> |
| 2935 | <HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/> |
| 2936 | <HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/> |
| 2937 | <HAnimJoint USE='hanim_l_pinky0' containerField='joints'/> |
| 2938 | <HAnimJoint USE='hanim_r_pinky0' containerField='joints'/> |
| 2939 | <HAnimJoint USE='hanim_l_pinky1' containerField='joints'/> |
| 2940 | <HAnimJoint USE='hanim_r_pinky1' containerField='joints'/> |
| 2941 | <HAnimJoint USE='hanim_l_pinky2' containerField='joints'/> |
| 2942 | <HAnimJoint USE='hanim_r_pinky2' containerField='joints'/> |
| 2943 | <HAnimJoint USE='hanim_l_pinky3' containerField='joints'/> |
| 2944 | <HAnimJoint USE='hanim_r_pinky3' containerField='joints'/> |
| 2945 | <HAnimJoint USE='hanim_l_ring0' containerField='joints'/> |
| 2946 | <HAnimJoint USE='hanim_r_ring0' containerField='joints'/> |
| 2947 | <HAnimJoint USE='hanim_l_ring1' containerField='joints'/> |
| 2948 | <HAnimJoint USE='hanim_r_ring1' containerField='joints'/> |
| 2949 | <HAnimJoint USE='hanim_l_ring2' containerField='joints'/> |
| 2950 | <HAnimJoint USE='hanim_r_ring2' containerField='joints'/> |
| 2951 | <HAnimJoint USE='hanim_l_ring3' containerField='joints'/> |
| 2952 | <HAnimJoint USE='hanim_r_ring3' containerField='joints'/> |
| 2953 | <HAnimJoint USE='hanim_l_shoulder' containerField='joints'/> |
| 2954 | <HAnimJoint USE='hanim_r_shoulder' containerField='joints'/> |
| 2955 | <HAnimJoint USE='hanim_l_sternoclavicular' containerField='joints'/> |
| 2956 | <HAnimJoint USE='hanim_r_sternoclavicular' containerField='joints'/> |
| 2957 | <HAnimJoint USE='hanim_l_subtalar' containerField='joints'/> |
| 2958 | <HAnimJoint USE='hanim_r_subtalar' containerField='joints'/> |
| 2959 | <HAnimJoint USE='hanim_l_thumb1' containerField='joints'/> |
| 2960 | <HAnimJoint USE='hanim_r_thumb1' containerField='joints'/> |
| 2961 | <HAnimJoint USE='hanim_l_thumb2' containerField='joints'/> |
| 2962 | <HAnimJoint USE='hanim_r_thumb2' containerField='joints'/> |
| 2963 | <HAnimJoint USE='hanim_l_thumb3' containerField='joints'/> |
| 2964 | <HAnimJoint USE='hanim_r_thumb3' containerField='joints'/> |
| 2965 | <HAnimJoint USE='hanim_l_wrist' containerField='joints'/> |
| 2966 | <HAnimJoint USE='hanim_r_wrist' containerField='joints'/> |
| 2967 | <HAnimSegment USE='hanim_pelvis' containerField='segments'/> |
| 2968 | <HAnimSegment USE='hanim_skull' containerField='segments'/> |
| 2969 | <HAnimSegment USE='hanim_jaw' containerField='segments'/> |
| 2970 | <HAnimSegment USE='hanim_c1' containerField='segments'/> |
| 2971 | <HAnimSegment USE='hanim_c2' containerField='segments'/> |
| 2972 | <HAnimSegment USE='hanim_c3' containerField='segments'/> |
| 2973 | <HAnimSegment USE='hanim_c4' containerField='segments'/> |
| 2974 | <HAnimSegment USE='hanim_c5' containerField='segments'/> |
| 2975 | <HAnimSegment USE='hanim_c6' containerField='segments'/> |
| 2976 | <HAnimSegment USE='hanim_c7' containerField='segments'/> |
| 2977 | <HAnimSegment USE='hanim_t1' containerField='segments'/> |
| 2978 | <HAnimSegment USE='hanim_t2' containerField='segments'/> |
| 2979 | <HAnimSegment USE='hanim_t3' containerField='segments'/> |
| 2980 | <HAnimSegment USE='hanim_t4' containerField='segments'/> |
| 2981 | <HAnimSegment USE='hanim_t5' containerField='segments'/> |
| 2982 | <HAnimSegment USE='hanim_t6' containerField='segments'/> |
| 2983 | <HAnimSegment USE='hanim_t7' containerField='segments'/> |
| 2984 | <HAnimSegment USE='hanim_t8' containerField='segments'/> |
| 2985 | <HAnimSegment USE='hanim_t9' containerField='segments'/> |
| 2986 | <HAnimSegment USE='hanim_t10' containerField='segments'/> |
| 2987 | <HAnimSegment USE='hanim_t11' containerField='segments'/> |
| 2988 | <HAnimSegment USE='hanim_t12' containerField='segments'/> |
| 2989 | <HAnimSegment USE='hanim_l1' containerField='segments'/> |
| 2990 | <HAnimSegment USE='hanim_l2' containerField='segments'/> |
| 2991 | <HAnimSegment USE='hanim_l3' containerField='segments'/> |
| 2992 | <HAnimSegment USE='hanim_l4' containerField='segments'/> |
| 2993 | <HAnimSegment USE='hanim_l5' containerField='segments'/> |
| 2994 | <HAnimSegment USE='hanim_sacrum' containerField='segments'/> |
| 2995 | <HAnimSegment USE='hanim_l_calf' containerField='segments'/> |
| 2996 | <HAnimSegment USE='hanim_r_calf' containerField='segments'/> |
| 2997 | <HAnimSegment USE='hanim_l_clavicle' containerField='segments'/> |
| 2998 | <HAnimSegment USE='hanim_r_clavicle' containerField='segments'/> |
| 2999 | <HAnimSegment USE='hanim_l_eyeball' containerField='segments'/> |
| 3000 | <HAnimSegment USE='hanim_r_eyeball' containerField='segments'/> |
| 3001 | <HAnimSegment USE='hanim_l_eyebrow' containerField='segments'/> |
| 3002 | <HAnimSegment USE='hanim_r_eyebrow' containerField='segments'/> |
| 3003 | <HAnimSegment USE='hanim_l_eyelid' containerField='segments'/> |
| 3004 | <HAnimSegment USE='hanim_r_eyelid' containerField='segments'/> |
| 3005 | <HAnimSegment USE='hanim_l_forearm' containerField='segments'/> |
| 3006 | <HAnimSegment USE='hanim_r_forearm' containerField='segments'/> |
| 3007 | <HAnimSegment USE='hanim_l_forefoot' containerField='segments'/> |
| 3008 | <HAnimSegment USE='hanim_r_forefoot' containerField='segments'/> |
| 3009 | <HAnimSegment USE='hanim_l_hand' containerField='segments'/> |
| 3010 | <HAnimSegment USE='hanim_r_hand' containerField='segments'/> |
| 3011 | <HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/> |
| 3012 | <HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/> |
| 3013 | <HAnimSegment USE='hanim_l_index_distal' containerField='segments'/> |
| 3014 | <HAnimSegment USE='hanim_r_index_distal' containerField='segments'/> |
| 3015 | <HAnimSegment USE='hanim_l_index_metacarpal' containerField='segments'/> |
| 3016 | <HAnimSegment USE='hanim_r_index_metacarpal' containerField='segments'/> |
| 3017 | <HAnimSegment USE='hanim_l_index_middle' containerField='segments'/> |
| 3018 | <HAnimSegment USE='hanim_r_index_middle' containerField='segments'/> |
| 3019 | <HAnimSegment USE='hanim_l_index_proximal' containerField='segments'/> |
| 3020 | <HAnimSegment USE='hanim_r_index_proximal' containerField='segments'/> |
| 3021 | <HAnimSegment USE='hanim_l_middistal' containerField='segments'/> |
| 3022 | <HAnimSegment USE='hanim_r_middistal' containerField='segments'/> |
| 3023 | <HAnimSegment USE='hanim_l_middle_distal' containerField='segments'/> |
| 3024 | <HAnimSegment USE='hanim_r_middle_distal' containerField='segments'/> |
| 3025 | <HAnimSegment USE='hanim_l_middle_metacarpal' containerField='segments'/> |
| 3026 | <HAnimSegment USE='hanim_r_middle_metacarpal' containerField='segments'/> |
| 3027 | <HAnimSegment USE='hanim_l_middle_middle' containerField='segments'/> |
| 3028 | <HAnimSegment USE='hanim_r_middle_middle' containerField='segments'/> |
| 3029 | <HAnimSegment USE='hanim_l_middle_proximal' containerField='segments'/> |
| 3030 | <HAnimSegment USE='hanim_r_middle_proximal' containerField='segments'/> |
| 3031 | <HAnimSegment USE='hanim_l_midproximal' containerField='segments'/> |
| 3032 | <HAnimSegment USE='hanim_r_midproximal' containerField='segments'/> |
| 3033 | <HAnimSegment USE='hanim_l_pinky_distal' containerField='segments'/> |
| 3034 | <HAnimSegment USE='hanim_r_pinky_distal' containerField='segments'/> |
| 3035 | <HAnimSegment USE='hanim_l_pinky_metacarpal' containerField='segments'/> |
| 3036 | <HAnimSegment USE='hanim_r_pinky_metacarpal' containerField='segments'/> |
| 3037 | <HAnimSegment USE='hanim_l_pinky_middle' containerField='segments'/> |
| 3038 | <HAnimSegment USE='hanim_r_pinky_middle' containerField='segments'/> |
| 3039 | <HAnimSegment USE='hanim_l_pinky_proximal' containerField='segments'/> |
| 3040 | <HAnimSegment USE='hanim_r_pinky_proximal' containerField='segments'/> |
| 3041 | <HAnimSegment USE='hanim_l_ring_distal' containerField='segments'/> |
| 3042 | <HAnimSegment USE='hanim_r_ring_distal' containerField='segments'/> |
| 3043 | <HAnimSegment USE='hanim_l_ring_metacarpal' containerField='segments'/> |
| 3044 | <HAnimSegment USE='hanim_r_ring_metacarpal' containerField='segments'/> |
| 3045 | <HAnimSegment USE='hanim_l_ring_middle' containerField='segments'/> |
| 3046 | <HAnimSegment USE='hanim_r_ring_middle' containerField='segments'/> |
| 3047 | <HAnimSegment USE='hanim_l_ring_proximal' containerField='segments'/> |
| 3048 | <HAnimSegment USE='hanim_r_ring_proximal' containerField='segments'/> |
| 3049 | <HAnimSegment USE='hanim_l_scapula' containerField='segments'/> |
| 3050 | <HAnimSegment USE='hanim_r_scapula' containerField='segments'/> |
| 3051 | <HAnimSegment USE='hanim_l_thigh' containerField='segments'/> |
| 3052 | <HAnimSegment USE='hanim_r_thigh' containerField='segments'/> |
| 3053 | <HAnimSegment USE='hanim_l_thumb_distal' containerField='segments'/> |
| 3054 | <HAnimSegment USE='hanim_r_thumb_distal' containerField='segments'/> |
| 3055 | <HAnimSegment USE='hanim_l_thumb_metacarpal' containerField='segments'/> |
| 3056 | <HAnimSegment USE='hanim_r_thumb_metacarpal' containerField='segments'/> |
| 3057 | <HAnimSegment USE='hanim_l_thumb_proximal' containerField='segments'/> |
| 3058 | <HAnimSegment USE='hanim_r_thumb_proximal' containerField='segments'/> |
| 3059 | <HAnimSegment USE='hanim_l_upperarm' containerField='segments'/> |
| 3060 | <HAnimSegment USE='hanim_r_upperarm' containerField='segments'/> |
| 3061 | <HAnimSite USE='hanim_crotch_pt' containerField='sites'/> |
| 3062 | <HAnimSite USE='hanim_skull_tip' containerField='sites'/> |
| 3063 | <HAnimSite USE='hanim_sellion_pt' containerField='sites'/> |
| 3064 | <HAnimSite USE='hanim_supramenton_pt' containerField='sites'/> |
| 3065 | <HAnimSite USE='hanim_nuchale_pt' containerField='sites'/> |
| 3066 | <HAnimSite USE='hanim_suprasternale_pt' containerField='sites'/> |
| 3067 | <HAnimSite USE='hanim_cervicale_pt' containerField='sites'/> |
| 3068 | <HAnimSite USE='hanim_substernale_pt' containerField='sites'/> |
| 3069 | <HAnimSite USE='hanim_rib10_midspine_pt' containerField='sites'/> |
| 3070 | <HAnimSite USE='hanim_waist_preferred_post_pt' containerField='sites'/> |
| 3071 | <HAnimSite USE='hanim_navel_pt' containerField='sites'/> |
| 3072 | <HAnimSite USE='hanim_l_acromion_pt' containerField='sites'/> |
| 3073 | <HAnimSite USE='hanim_r_acromion_pt' containerField='sites'/> |
| 3074 | <HAnimSite USE='hanim_r_asis_pt' containerField='sites'/> |
| 3075 | <HAnimSite USE='hanim_l_asis_pt' containerField='sites'/> |
| 3076 | <HAnimSite USE='hanim_l_axilla_ant_pt' containerField='sites'/> |
| 3077 | <HAnimSite USE='hanim_r_axilla_ant_pt' containerField='sites'/> |
| 3078 | <HAnimSite USE='hanim_l_axilla_post_pt' containerField='sites'/> |
| 3079 | <HAnimSite USE='hanim_r_axilla_post_pt' containerField='sites'/> |
| 3080 | <HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/> |
| 3081 | <HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/> |
| 3082 | <HAnimSite USE='hanim_l_clavicale_pt' containerField='sites'/> |
| 3083 | <HAnimSite USE='hanim_r_clavicale_pt' containerField='sites'/> |
| 3084 | <HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/> |
| 3085 | <HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/> |
| 3086 | <HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/> |
| 3087 | <HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/> |
| 3088 | <HAnimSite USE='hanim_l_eyeball_site_view' containerField='viewpoints'/> |
| 3089 | <HAnimSite USE='hanim_r_eyeball_site_view' containerField='viewpoints'/> |
| 3090 | <HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/> |
| 3091 | <HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/> |
| 3092 | <HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/> |
| 3093 | <HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/> |
| 3094 | <HAnimSite USE='hanim_l_forefoot_tip' containerField='sites'/> |
| 3095 | <HAnimSite USE='hanim_r_forefoot_tip' containerField='sites'/> |
| 3096 | <HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/> |
| 3097 | <HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/> |
| 3098 | <HAnimSite USE='hanim_l_hand_front_view' containerField='viewpoints'/> |
| 3099 | <HAnimSite USE='hanim_r_hand_front_view' containerField='viewpoints'/> |
| 3100 | <HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/> |
| 3101 | <HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/> |
| 3102 | <HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/> |
| 3103 | <HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/> |
| 3104 | <HAnimSite USE='hanim_r_iliocristale_pt' containerField='sites'/> |
| 3105 | <HAnimSite USE='hanim_l_iliocristale_pt' containerField='sites'/> |
| 3106 | <HAnimSite USE='hanim_l_index_distal_tip' containerField='sites'/> |
| 3107 | <HAnimSite USE='hanim_r_index_distal_tip' containerField='sites'/> |
| 3108 | <HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/> |
| 3109 | <HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/> |
| 3110 | <HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/> |
| 3111 | <HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/> |
| 3112 | <HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/> |
| 3113 | <HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/> |
| 3114 | <HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/> |
| 3115 | <HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/> |
| 3116 | <HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/> |
| 3117 | <HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/> |
| 3118 | <HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/> |
| 3119 | <HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/> |
| 3120 | <HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/> |
| 3121 | <HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/> |
| 3122 | <HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/> |
| 3123 | <HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/> |
| 3124 | <HAnimSite USE='hanim_l_middle_distal_tip' containerField='sites'/> |
| 3125 | <HAnimSite USE='hanim_r_middle_distal_tip' containerField='sites'/> |
| 3126 | <HAnimSite USE='hanim_r_neck_base_pt' containerField='sites'/> |
| 3127 | <HAnimSite USE='hanim_l_neck_base_pt' containerField='sites'/> |
| 3128 | <HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/> |
| 3129 | <HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/> |
| 3130 | <HAnimSite USE='hanim_l_pinky_distal_tip' containerField='sites'/> |
| 3131 | <HAnimSite USE='hanim_r_pinky_distal_tip' containerField='sites'/> |
| 3132 | <HAnimSite USE='hanim_r_psis_pt' containerField='sites'/> |
| 3133 | <HAnimSite USE='hanim_l_psis_pt' containerField='sites'/> |
| 3134 | <HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/> |
| 3135 | <HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/> |
| 3136 | <HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/> |
| 3137 | <HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/> |
| 3138 | <HAnimSite USE='hanim_r_rib10_pt' containerField='sites'/> |
| 3139 | <HAnimSite USE='hanim_l_rib10_pt' containerField='sites'/> |
| 3140 | <HAnimSite USE='hanim_l_ring_distal_tip' containerField='sites'/> |
| 3141 | <HAnimSite USE='hanim_r_ring_distal_tip' containerField='sites'/> |
| 3142 | <HAnimSite USE='hanim_temporomandibular_l_site_pt' containerField='sites'/> |
| 3143 | <HAnimSite USE='hanim_temporomandibular_r_site_pt' containerField='sites'/> |
| 3144 | <HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/> |
| 3145 | <HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/> |
| 3146 | <HAnimSite USE='hanim_r_thelion_pt' containerField='sites'/> |
| 3147 | <HAnimSite USE='hanim_l_thelion_pt' containerField='sites'/> |
| 3148 | <HAnimSite USE='hanim_l_thumb_distal_tip' containerField='sites'/> |
| 3149 | <HAnimSite USE='hanim_r_thumb_distal_tip' containerField='sites'/> |
| 3150 | <HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/> |
| 3151 | <HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/> |
| 3152 | <HAnimSite USE='hanim_r_trochanterion_pt' containerField='sites'/> |
| 3153 | <HAnimSite USE='hanim_l_trochanterion_pt' containerField='sites'/> |
| 3154 | <HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/> |
| 3155 | <HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/> |
| 3156 | </HAnimHumanoid> |
| 3157 | <Group DEF='StopAnimation'> |
| 3158 |
<!-- ROUTE information for StopTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to startTime
]
[from fraction_changed to Stop_HumanoidRoot_TranslationInterpolator.set_fraction
]
[from fraction_changed to Stop_HumanoidRoot_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_sacroiliac_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_subtalar_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_midtarsal_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_metatarsal_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_subtalar_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_midtarsal_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_metatarsal_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vl5_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vl4_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vl3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vl2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vl1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt12_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt11_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt10_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt9_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt8_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt7_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt6_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt5_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt4_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vt1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc7_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc6_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc5_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc4_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_vc1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_skullbase_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_eyeball_joint_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_eyeball_joint_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_sternoclavicular_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_acromioclavicular_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_thumb1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_thumb2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_thumb3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_index0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_index1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_index2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_index3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_middle0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_middle1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_middle2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_middle3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_ring0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_ring1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_ring2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_ring3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_pinky0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_pinky1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_pinky2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_l_pinky3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_sternoclavicular_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_acromioclavicular_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_thumb1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_thumb2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_thumb3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_index0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_index1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_index2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_index3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_middle0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_middle1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_middle2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_middle3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_ring0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_ring1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_ring2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_ring3_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_pinky0_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_pinky1_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_pinky2_RotationInterpolator.set_fraction
]
[from fraction_changed to Stop_r_pinky3_RotationInterpolator.set_fraction
]
-->
<TimeSensor DEF='StopTimer' cycleInterval='5.73' loop='true'/> |
| 3159 |
<!-- ROUTE information for Stop_HumanoidRoot_TranslationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Stop_HumanoidRoot_TranslationInterpolator' key='0 0.5 1' keyValue='0 0 0 0 0 0 0 0 0'/> |
| 3160 |
<!-- ROUTE information for Stop_HumanoidRoot_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Stop_HumanoidRoot_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3161 |
<!-- ROUTE information for Stop_sacroiliac_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Stop_sacroiliac_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3162 |
<!-- ROUTE information for Stop_l_hip_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3163 |
<!-- ROUTE information for Stop_l_knee_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3164 |
<!-- ROUTE information for Stop_l_ankle_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_ankle_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3165 |
<!-- ROUTE information for Stop_l_subtalar_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_subtalar.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_subtalar_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3166 |
<!-- ROUTE information for Stop_l_midtarsal_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_midtarsal.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_midtarsal_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3167 |
<!-- ROUTE information for Stop_l_metatarsal_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_metatarsal_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3168 |
<!-- ROUTE information for Stop_r_hip_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3169 |
<!-- ROUTE information for Stop_r_knee_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3170 |
<!-- ROUTE information for Stop_r_ankle_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_ankle_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3171 |
<!-- ROUTE information for Stop_r_subtalar_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_subtalar.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_subtalar_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3172 |
<!-- ROUTE information for Stop_r_midtarsal_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_midtarsal.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_midtarsal_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3173 |
<!-- ROUTE information for Stop_r_metatarsal_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_metatarsal_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3174 |
<!-- ROUTE information for Stop_vl5_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Stop_vl5_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3175 |
<!-- ROUTE information for Stop_vl4_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl4.rotation
]
-->
<OrientationInterpolator DEF='Stop_vl4_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3176 |
<!-- ROUTE information for Stop_vl3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl3.rotation
]
-->
<OrientationInterpolator DEF='Stop_vl3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3177 |
<!-- ROUTE information for Stop_vl2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl2.rotation
]
-->
<OrientationInterpolator DEF='Stop_vl2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3178 |
<!-- ROUTE information for Stop_vl1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Stop_vl1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3179 |
<!-- ROUTE information for Stop_vt12_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt12.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt12_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3180 |
<!-- ROUTE information for Stop_vt11_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt11.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt11_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3181 |
<!-- ROUTE information for Stop_vt10_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt10.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt10_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3182 |
<!-- ROUTE information for Stop_vt9_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt9.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt9_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3183 |
<!-- ROUTE information for Stop_vt8_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt8.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt8_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3184 |
<!-- ROUTE information for Stop_vt7_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt7.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt7_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3185 |
<!-- ROUTE information for Stop_vt6_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt6.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt6_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3186 |
<!-- ROUTE information for Stop_vt5_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt5.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt5_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3187 |
<!-- ROUTE information for Stop_vt4_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt4.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt4_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3188 |
<!-- ROUTE information for Stop_vt3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt3.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3189 |
<!-- ROUTE information for Stop_vt2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt2.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3190 |
<!-- ROUTE information for Stop_vt1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vt1.rotation
]
-->
<OrientationInterpolator DEF='Stop_vt1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3191 |
<!-- ROUTE information for Stop_vc7_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc7.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc7_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3192 |
<!-- ROUTE information for Stop_vc6_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc6_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3193 |
<!-- ROUTE information for Stop_vc5_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc5.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc5_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3194 |
<!-- ROUTE information for Stop_vc4_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc4_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3195 |
<!-- ROUTE information for Stop_vc3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc3.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3196 |
<!-- ROUTE information for Stop_vc2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc2.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3197 |
<!-- ROUTE information for Stop_vc1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc1.rotation
]
-->
<OrientationInterpolator DEF='Stop_vc1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3198 |
<!-- ROUTE information for Stop_skullbase_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Stop_skullbase_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3199 |
<!-- ROUTE information for Stop_l_eyeball_joint_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_eyeball_joint.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_eyeball_joint_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3200 |
<!-- ROUTE information for Stop_r_eyeball_joint_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_eyeball_joint.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_eyeball_joint_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3201 |
<!-- ROUTE information for Stop_l_sternoclavicular_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_sternoclavicular_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3202 |
<!-- ROUTE information for Stop_l_acromioclavicular_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_acromioclavicular_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3203 |
<!-- ROUTE information for Stop_l_shoulder_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3204 |
<!-- ROUTE information for Stop_l_elbow_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3205 |
<!-- ROUTE information for Stop_l_wrist_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3206 |
<!-- ROUTE information for Stop_l_thumb1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_thumb1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3207 |
<!-- ROUTE information for Stop_l_thumb2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb2.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_thumb2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3208 |
<!-- ROUTE information for Stop_l_thumb3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb3.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_thumb3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3209 |
<!-- ROUTE information for Stop_l_index0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_index0.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_index0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3210 |
<!-- ROUTE information for Stop_l_index1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_index1.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_index1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3211 |
<!-- ROUTE information for Stop_l_index2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_index2.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_index2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3212 |
<!-- ROUTE information for Stop_l_index3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_index3.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_index3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3213 |
<!-- ROUTE information for Stop_l_middle0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_middle0.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_middle0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3214 |
<!-- ROUTE information for Stop_l_middle1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_middle1.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_middle1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3215 |
<!-- ROUTE information for Stop_l_middle2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_middle2.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_middle2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3216 |
<!-- ROUTE information for Stop_l_middle3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_middle3.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_middle3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3217 |
<!-- ROUTE information for Stop_l_ring0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ring0.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_ring0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3218 |
<!-- ROUTE information for Stop_l_ring1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ring1.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_ring1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3219 |
<!-- ROUTE information for Stop_l_ring2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ring2.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_ring2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3220 |
<!-- ROUTE information for Stop_l_ring3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ring3.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_ring3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3221 |
<!-- ROUTE information for Stop_l_pinky0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_pinky0.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_pinky0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3222 |
<!-- ROUTE information for Stop_l_pinky1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_pinky1.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_pinky1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3223 |
<!-- ROUTE information for Stop_l_pinky2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_pinky2.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_pinky2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3224 |
<!-- ROUTE information for Stop_l_pinky3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_pinky3.rotation
]
-->
<OrientationInterpolator DEF='Stop_l_pinky3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3225 |
<!-- ROUTE information for Stop_r_sternoclavicular_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_sternoclavicular_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3226 |
<!-- ROUTE information for Stop_r_acromioclavicular_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_acromioclavicular_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3227 |
<!-- ROUTE information for Stop_r_shoulder_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3228 |
<!-- ROUTE information for Stop_r_elbow_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3229 |
<!-- ROUTE information for Stop_r_wrist_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3230 |
<!-- ROUTE information for Stop_r_thumb1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_thumb1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3231 |
<!-- ROUTE information for Stop_r_thumb2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb2.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_thumb2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3232 |
<!-- ROUTE information for Stop_r_thumb3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb3.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_thumb3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3233 |
<!-- ROUTE information for Stop_r_index0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index0.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_index0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3234 |
<!-- ROUTE information for Stop_r_index1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index1.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_index1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3235 |
<!-- ROUTE information for Stop_r_index2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index2.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_index2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3236 |
<!-- ROUTE information for Stop_r_index3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index3.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_index3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3237 |
<!-- ROUTE information for Stop_r_middle0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_middle0.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_middle0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3238 |
<!-- ROUTE information for Stop_r_middle1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_middle1.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_middle1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3239 |
<!-- ROUTE information for Stop_r_middle2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_middle2.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_middle2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3240 |
<!-- ROUTE information for Stop_r_middle3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_middle3.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_middle3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3241 |
<!-- ROUTE information for Stop_r_ring0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ring0.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_ring0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3242 |
<!-- ROUTE information for Stop_r_ring1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ring1.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_ring1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3243 |
<!-- ROUTE information for Stop_r_ring2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ring2.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_ring2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3244 |
<!-- ROUTE information for Stop_r_ring3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ring3.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_ring3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3245 |
<!-- ROUTE information for Stop_r_pinky0_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_pinky0.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_pinky0_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3246 |
<!-- ROUTE information for Stop_r_pinky1_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_pinky1.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_pinky1_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3247 |
<!-- ROUTE information for Stop_r_pinky2_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_pinky2.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_pinky2_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3248 |
<!-- ROUTE information for Stop_r_pinky3_RotationInterpolator node:
[from StopTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_pinky3.rotation
]
-->
<OrientationInterpolator DEF='Stop_r_pinky3_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3249 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_HumanoidRoot_TranslationInterpolator' toField='set_fraction'/> |
| 3250 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_HumanoidRoot_RotationInterpolator' toField='set_fraction'/> |
| 3251 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_sacroiliac_RotationInterpolator' toField='set_fraction'/> |
| 3252 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3253 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3254 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3255 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_subtalar_RotationInterpolator' toField='set_fraction'/> |
| 3256 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_midtarsal_RotationInterpolator' toField='set_fraction'/> |
| 3257 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_metatarsal_RotationInterpolator' toField='set_fraction'/> |
| 3258 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3259 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3260 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3261 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_subtalar_RotationInterpolator' toField='set_fraction'/> |
| 3262 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_midtarsal_RotationInterpolator' toField='set_fraction'/> |
| 3263 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_metatarsal_RotationInterpolator' toField='set_fraction'/> |
| 3264 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vl5_RotationInterpolator' toField='set_fraction'/> |
| 3265 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vl4_RotationInterpolator' toField='set_fraction'/> |
| 3266 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vl3_RotationInterpolator' toField='set_fraction'/> |
| 3267 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vl2_RotationInterpolator' toField='set_fraction'/> |
| 3268 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vl1_RotationInterpolator' toField='set_fraction'/> |
| 3269 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt12_RotationInterpolator' toField='set_fraction'/> |
| 3270 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt11_RotationInterpolator' toField='set_fraction'/> |
| 3271 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt10_RotationInterpolator' toField='set_fraction'/> |
| 3272 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt9_RotationInterpolator' toField='set_fraction'/> |
| 3273 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt8_RotationInterpolator' toField='set_fraction'/> |
| 3274 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt7_RotationInterpolator' toField='set_fraction'/> |
| 3275 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt6_RotationInterpolator' toField='set_fraction'/> |
| 3276 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt5_RotationInterpolator' toField='set_fraction'/> |
| 3277 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt4_RotationInterpolator' toField='set_fraction'/> |
| 3278 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt3_RotationInterpolator' toField='set_fraction'/> |
| 3279 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt2_RotationInterpolator' toField='set_fraction'/> |
| 3280 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vt1_RotationInterpolator' toField='set_fraction'/> |
| 3281 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc7_RotationInterpolator' toField='set_fraction'/> |
| 3282 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc6_RotationInterpolator' toField='set_fraction'/> |
| 3283 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc5_RotationInterpolator' toField='set_fraction'/> |
| 3284 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc4_RotationInterpolator' toField='set_fraction'/> |
| 3285 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc3_RotationInterpolator' toField='set_fraction'/> |
| 3286 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc2_RotationInterpolator' toField='set_fraction'/> |
| 3287 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_vc1_RotationInterpolator' toField='set_fraction'/> |
| 3288 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_skullbase_RotationInterpolator' toField='set_fraction'/> |
| 3289 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_eyeball_joint_RotationInterpolator' toField='set_fraction'/> |
| 3290 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_eyeball_joint_RotationInterpolator' toField='set_fraction'/> |
| 3291 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_sternoclavicular_RotationInterpolator' toField='set_fraction'/> |
| 3292 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_acromioclavicular_RotationInterpolator' toField='set_fraction'/> |
| 3293 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3294 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3295 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3296 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_thumb1_RotationInterpolator' toField='set_fraction'/> |
| 3297 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_thumb2_RotationInterpolator' toField='set_fraction'/> |
| 3298 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_thumb3_RotationInterpolator' toField='set_fraction'/> |
| 3299 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_index0_RotationInterpolator' toField='set_fraction'/> |
| 3300 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_index1_RotationInterpolator' toField='set_fraction'/> |
| 3301 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_index2_RotationInterpolator' toField='set_fraction'/> |
| 3302 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_index3_RotationInterpolator' toField='set_fraction'/> |
| 3303 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_middle0_RotationInterpolator' toField='set_fraction'/> |
| 3304 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_middle1_RotationInterpolator' toField='set_fraction'/> |
| 3305 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_middle2_RotationInterpolator' toField='set_fraction'/> |
| 3306 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_middle3_RotationInterpolator' toField='set_fraction'/> |
| 3307 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_ring0_RotationInterpolator' toField='set_fraction'/> |
| 3308 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_ring1_RotationInterpolator' toField='set_fraction'/> |
| 3309 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_ring2_RotationInterpolator' toField='set_fraction'/> |
| 3310 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_ring3_RotationInterpolator' toField='set_fraction'/> |
| 3311 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_pinky0_RotationInterpolator' toField='set_fraction'/> |
| 3312 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_pinky1_RotationInterpolator' toField='set_fraction'/> |
| 3313 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_pinky2_RotationInterpolator' toField='set_fraction'/> |
| 3314 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_l_pinky3_RotationInterpolator' toField='set_fraction'/> |
| 3315 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_sternoclavicular_RotationInterpolator' toField='set_fraction'/> |
| 3316 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_acromioclavicular_RotationInterpolator' toField='set_fraction'/> |
| 3317 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3318 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3319 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3320 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_thumb1_RotationInterpolator' toField='set_fraction'/> |
| 3321 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_thumb2_RotationInterpolator' toField='set_fraction'/> |
| 3322 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_thumb3_RotationInterpolator' toField='set_fraction'/> |
| 3323 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_index0_RotationInterpolator' toField='set_fraction'/> |
| 3324 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_index1_RotationInterpolator' toField='set_fraction'/> |
| 3325 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_index2_RotationInterpolator' toField='set_fraction'/> |
| 3326 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_index3_RotationInterpolator' toField='set_fraction'/> |
| 3327 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_middle0_RotationInterpolator' toField='set_fraction'/> |
| 3328 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_middle1_RotationInterpolator' toField='set_fraction'/> |
| 3329 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_middle2_RotationInterpolator' toField='set_fraction'/> |
| 3330 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_middle3_RotationInterpolator' toField='set_fraction'/> |
| 3331 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_ring0_RotationInterpolator' toField='set_fraction'/> |
| 3332 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_ring1_RotationInterpolator' toField='set_fraction'/> |
| 3333 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_ring2_RotationInterpolator' toField='set_fraction'/> |
| 3334 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_ring3_RotationInterpolator' toField='set_fraction'/> |
| 3335 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_pinky0_RotationInterpolator' toField='set_fraction'/> |
| 3336 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_pinky1_RotationInterpolator' toField='set_fraction'/> |
| 3337 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_pinky2_RotationInterpolator' toField='set_fraction'/> |
| 3338 | < ROUTE fromNode='StopTimer' fromField='fraction_changed' toNode='Stop_r_pinky3_RotationInterpolator' toField='set_fraction'/> |
| 3339 | < ROUTE fromNode='Stop_HumanoidRoot_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3340 | < ROUTE fromNode='Stop_HumanoidRoot_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3341 | < ROUTE fromNode='Stop_sacroiliac_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3342 | < ROUTE fromNode='Stop_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3343 | < ROUTE fromNode='Stop_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3344 | < ROUTE fromNode='Stop_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3345 | < ROUTE fromNode='Stop_l_subtalar_RotationInterpolator' fromField='value_changed' toNode='hanim_l_subtalar' toField='rotation'/> |
| 3346 | < ROUTE fromNode='Stop_l_midtarsal_RotationInterpolator' fromField='value_changed' toNode='hanim_l_midtarsal' toField='rotation'/> |
| 3347 | < ROUTE fromNode='Stop_l_metatarsal_RotationInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3348 | < ROUTE fromNode='Stop_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3349 | < ROUTE fromNode='Stop_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3350 | < ROUTE fromNode='Stop_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3351 | < ROUTE fromNode='Stop_r_subtalar_RotationInterpolator' fromField='value_changed' toNode='hanim_r_subtalar' toField='rotation'/> |
| 3352 | < ROUTE fromNode='Stop_r_midtarsal_RotationInterpolator' fromField='value_changed' toNode='hanim_r_midtarsal' toField='rotation'/> |
| 3353 | < ROUTE fromNode='Stop_r_metatarsal_RotationInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3354 | < ROUTE fromNode='Stop_vl5_RotationInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3355 | < ROUTE fromNode='Stop_vl4_RotationInterpolator' fromField='value_changed' toNode='hanim_vl4' toField='rotation'/> |
| 3356 | < ROUTE fromNode='Stop_vl3_RotationInterpolator' fromField='value_changed' toNode='hanim_vl3' toField='rotation'/> |
| 3357 | < ROUTE fromNode='Stop_vl2_RotationInterpolator' fromField='value_changed' toNode='hanim_vl2' toField='rotation'/> |
| 3358 | < ROUTE fromNode='Stop_vl1_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3359 | < ROUTE fromNode='Stop_vt12_RotationInterpolator' fromField='value_changed' toNode='hanim_vt12' toField='rotation'/> |
| 3360 | < ROUTE fromNode='Stop_vt11_RotationInterpolator' fromField='value_changed' toNode='hanim_vt11' toField='rotation'/> |
| 3361 | < ROUTE fromNode='Stop_vt10_RotationInterpolator' fromField='value_changed' toNode='hanim_vt10' toField='rotation'/> |
| 3362 | < ROUTE fromNode='Stop_vt9_RotationInterpolator' fromField='value_changed' toNode='hanim_vt9' toField='rotation'/> |
| 3363 | < ROUTE fromNode='Stop_vt8_RotationInterpolator' fromField='value_changed' toNode='hanim_vt8' toField='rotation'/> |
| 3364 | < ROUTE fromNode='Stop_vt7_RotationInterpolator' fromField='value_changed' toNode='hanim_vt7' toField='rotation'/> |
| 3365 | < ROUTE fromNode='Stop_vt6_RotationInterpolator' fromField='value_changed' toNode='hanim_vt6' toField='rotation'/> |
| 3366 | < ROUTE fromNode='Stop_vt5_RotationInterpolator' fromField='value_changed' toNode='hanim_vt5' toField='rotation'/> |
| 3367 | < ROUTE fromNode='Stop_vt4_RotationInterpolator' fromField='value_changed' toNode='hanim_vt4' toField='rotation'/> |
| 3368 | < ROUTE fromNode='Stop_vt3_RotationInterpolator' fromField='value_changed' toNode='hanim_vt3' toField='rotation'/> |
| 3369 | < ROUTE fromNode='Stop_vt2_RotationInterpolator' fromField='value_changed' toNode='hanim_vt2' toField='rotation'/> |
| 3370 | < ROUTE fromNode='Stop_vt1_RotationInterpolator' fromField='value_changed' toNode='hanim_vt1' toField='rotation'/> |
| 3371 | < ROUTE fromNode='Stop_vc7_RotationInterpolator' fromField='value_changed' toNode='hanim_vc7' toField='rotation'/> |
| 3372 | < ROUTE fromNode='Stop_vc6_RotationInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3373 | < ROUTE fromNode='Stop_vc5_RotationInterpolator' fromField='value_changed' toNode='hanim_vc5' toField='rotation'/> |
| 3374 | < ROUTE fromNode='Stop_vc4_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3375 | < ROUTE fromNode='Stop_vc3_RotationInterpolator' fromField='value_changed' toNode='hanim_vc3' toField='rotation'/> |
| 3376 | < ROUTE fromNode='Stop_vc2_RotationInterpolator' fromField='value_changed' toNode='hanim_vc2' toField='rotation'/> |
| 3377 | < ROUTE fromNode='Stop_vc1_RotationInterpolator' fromField='value_changed' toNode='hanim_vc1' toField='rotation'/> |
| 3378 | < ROUTE fromNode='Stop_skullbase_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3379 | < ROUTE fromNode='Stop_l_eyeball_joint_RotationInterpolator' fromField='value_changed' toNode='hanim_l_eyeball_joint' toField='rotation'/> |
| 3380 | < ROUTE fromNode='Stop_r_eyeball_joint_RotationInterpolator' fromField='value_changed' toNode='hanim_r_eyeball_joint' toField='rotation'/> |
| 3381 | < ROUTE fromNode='Stop_l_sternoclavicular_RotationInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3382 | < ROUTE fromNode='Stop_l_acromioclavicular_RotationInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3383 | < ROUTE fromNode='Stop_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3384 | < ROUTE fromNode='Stop_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3385 | < ROUTE fromNode='Stop_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3386 | < ROUTE fromNode='Stop_l_thumb1_RotationInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3387 | < ROUTE fromNode='Stop_l_thumb2_RotationInterpolator' fromField='value_changed' toNode='hanim_l_thumb2' toField='rotation'/> |
| 3388 | < ROUTE fromNode='Stop_l_thumb3_RotationInterpolator' fromField='value_changed' toNode='hanim_l_thumb3' toField='rotation'/> |
| 3389 | < ROUTE fromNode='Stop_l_index0_RotationInterpolator' fromField='value_changed' toNode='hanim_l_index0' toField='rotation'/> |
| 3390 | < ROUTE fromNode='Stop_l_index1_RotationInterpolator' fromField='value_changed' toNode='hanim_l_index1' toField='rotation'/> |
| 3391 | < ROUTE fromNode='Stop_l_index2_RotationInterpolator' fromField='value_changed' toNode='hanim_l_index2' toField='rotation'/> |
| 3392 | < ROUTE fromNode='Stop_l_index3_RotationInterpolator' fromField='value_changed' toNode='hanim_l_index3' toField='rotation'/> |
| 3393 | < ROUTE fromNode='Stop_l_middle0_RotationInterpolator' fromField='value_changed' toNode='hanim_l_middle0' toField='rotation'/> |
| 3394 | < ROUTE fromNode='Stop_l_middle1_RotationInterpolator' fromField='value_changed' toNode='hanim_l_middle1' toField='rotation'/> |
| 3395 | < ROUTE fromNode='Stop_l_middle2_RotationInterpolator' fromField='value_changed' toNode='hanim_l_middle2' toField='rotation'/> |
| 3396 | < ROUTE fromNode='Stop_l_middle3_RotationInterpolator' fromField='value_changed' toNode='hanim_l_middle3' toField='rotation'/> |
| 3397 | < ROUTE fromNode='Stop_l_ring0_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ring0' toField='rotation'/> |
| 3398 | < ROUTE fromNode='Stop_l_ring1_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ring1' toField='rotation'/> |
| 3399 | < ROUTE fromNode='Stop_l_ring2_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ring2' toField='rotation'/> |
| 3400 | < ROUTE fromNode='Stop_l_ring3_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ring3' toField='rotation'/> |
| 3401 | < ROUTE fromNode='Stop_l_pinky0_RotationInterpolator' fromField='value_changed' toNode='hanim_l_pinky0' toField='rotation'/> |
| 3402 | < ROUTE fromNode='Stop_l_pinky1_RotationInterpolator' fromField='value_changed' toNode='hanim_l_pinky1' toField='rotation'/> |
| 3403 | < ROUTE fromNode='Stop_l_pinky2_RotationInterpolator' fromField='value_changed' toNode='hanim_l_pinky2' toField='rotation'/> |
| 3404 | < ROUTE fromNode='Stop_l_pinky3_RotationInterpolator' fromField='value_changed' toNode='hanim_l_pinky3' toField='rotation'/> |
| 3405 | < ROUTE fromNode='Stop_r_sternoclavicular_RotationInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3406 | < ROUTE fromNode='Stop_r_acromioclavicular_RotationInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3407 | < ROUTE fromNode='Stop_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3408 | < ROUTE fromNode='Stop_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3409 | < ROUTE fromNode='Stop_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3410 | < ROUTE fromNode='Stop_r_thumb1_RotationInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3411 | < ROUTE fromNode='Stop_r_thumb2_RotationInterpolator' fromField='value_changed' toNode='hanim_r_thumb2' toField='rotation'/> |
| 3412 | < ROUTE fromNode='Stop_r_thumb3_RotationInterpolator' fromField='value_changed' toNode='hanim_r_thumb3' toField='rotation'/> |
| 3413 | < ROUTE fromNode='Stop_r_index0_RotationInterpolator' fromField='value_changed' toNode='hanim_r_index0' toField='rotation'/> |
| 3414 | < ROUTE fromNode='Stop_r_index1_RotationInterpolator' fromField='value_changed' toNode='hanim_r_index1' toField='rotation'/> |
| 3415 | < ROUTE fromNode='Stop_r_index2_RotationInterpolator' fromField='value_changed' toNode='hanim_r_index2' toField='rotation'/> |
| 3416 | < ROUTE fromNode='Stop_r_index3_RotationInterpolator' fromField='value_changed' toNode='hanim_r_index3' toField='rotation'/> |
| 3417 | < ROUTE fromNode='Stop_r_middle0_RotationInterpolator' fromField='value_changed' toNode='hanim_r_middle0' toField='rotation'/> |
| 3418 | < ROUTE fromNode='Stop_r_middle1_RotationInterpolator' fromField='value_changed' toNode='hanim_r_middle1' toField='rotation'/> |
| 3419 | < ROUTE fromNode='Stop_r_middle2_RotationInterpolator' fromField='value_changed' toNode='hanim_r_middle2' toField='rotation'/> |
| 3420 | < ROUTE fromNode='Stop_r_middle3_RotationInterpolator' fromField='value_changed' toNode='hanim_r_middle3' toField='rotation'/> |
| 3421 | < ROUTE fromNode='Stop_r_ring0_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ring0' toField='rotation'/> |
| 3422 | < ROUTE fromNode='Stop_r_ring1_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ring1' toField='rotation'/> |
| 3423 | < ROUTE fromNode='Stop_r_ring2_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ring2' toField='rotation'/> |
| 3424 | < ROUTE fromNode='Stop_r_ring3_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ring3' toField='rotation'/> |
| 3425 | < ROUTE fromNode='Stop_r_pinky0_RotationInterpolator' fromField='value_changed' toNode='hanim_r_pinky0' toField='rotation'/> |
| 3426 | < ROUTE fromNode='Stop_r_pinky1_RotationInterpolator' fromField='value_changed' toNode='hanim_r_pinky1' toField='rotation'/> |
| 3427 | < ROUTE fromNode='Stop_r_pinky2_RotationInterpolator' fromField='value_changed' toNode='hanim_r_pinky2' toField='rotation'/> |
| 3428 | < ROUTE fromNode='Stop_r_pinky3_RotationInterpolator' fromField='value_changed' toNode='hanim_r_pinky3' toField='rotation'/> |
| 3429 | </Group> |
| 3430 | <Group DEF='StandAnimation'> |
| 3431 |
<!-- ROUTE information for StandTimer node:
[from Stand_Touch.touchTime to startTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Stand_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_eyeball_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_r_eyeball_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Stand_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Stand_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Stand_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Stand_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Stand_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Stand_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Stand_r_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Stand_r_index1_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_r_index2_RollInterpolator.set_fraction
]
[from fraction_changed to Stand_r_index3_RollInterpolator.set_fraction
]
-->
<TimeSensor DEF='StandTimer' cycleInterval='5.73' loop='true'/> |
| 3432 |
<!-- ROUTE information for Stand_r_metatarsal_PitchInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='1 0 0 0 -1 0 0 0.015 1 0 0 0.17 -1 0 0 0.025 1 0 0 0.01 1 0 0 0'/> |
| 3433 |
<!-- ROUTE information for Stand_r_ankle_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_ankle_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3434 |
<!-- ROUTE information for Stand_r_knee_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3435 |
<!-- ROUTE information for Stand_r_hip_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3436 |
<!-- ROUTE information for Stand_l_ankle_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_ankle_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3437 |
<!-- ROUTE information for Stand_l_knee_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3438 |
<!-- ROUTE information for Stand_l_hip_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3439 |
<!-- ROUTE information for Stand_r_wrist_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 -1 0.25 0 0 1 0'/> |
| 3440 |
<!-- ROUTE information for Stand_r_elbow_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3441 |
<!-- ROUTE information for Stand_r_shoulder_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3442 |
<!-- ROUTE information for Stand_l_wrist_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3443 |
<!-- ROUTE information for Stand_l_elbow_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3444 |
<!-- ROUTE information for Stand_l_shoulder_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3445 |
<!-- ROUTE information for Stand_head_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Stand_head_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3446 |
<!-- ROUTE information for Stand_neck_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc7.rotation
]
-->
<OrientationInterpolator DEF='Stand_neck_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 -1 0 0 0.5 0 0 1 0'/> |
| 3447 |
<!-- ROUTE information for Stand_l_eyeball_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_eyeball_joint.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_eyeball_RotationInterpolator' key='0 0.4 0.7 1' keyValue='0 0 1 0 -1 0 0 0.5 1 0 0 0.45 0 0 1 0'/> |
| 3448 |
<!-- ROUTE information for Stand_r_eyeball_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_eyeball_joint.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_eyeball_RotationInterpolator' key='0 0.4 0.7 1' keyValue='0 0 1 0 -1 0 0 0.5 1 0 0 0.45 0 0 1 0'/> |
| 3449 |
<!-- ROUTE information for Stand_lower_body_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Stand_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3450 |
<!-- ROUTE information for Stand_upper_body_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Stand_upper_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3451 |
<!-- ROUTE information for Stand_whole_body_RotationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Stand_whole_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3452 |
<!-- ROUTE information for Stand_whole_body_TranslationInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Stand_whole_body_TranslationInterpolator' key='0 0.5 1' keyValue='0 0 0 0 0 0 0 0 0'/> |
| 3453 |
<!-- ROUTE information for Stand_l_sternoclavicular_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3454 |
<!-- ROUTE information for Stand_l_acromioclavicular_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3455 |
<!-- ROUTE information for Stand_r_sternoclavicular_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3456 |
<!-- ROUTE information for Stand_r_acromioclavicular_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3457 |
<!-- ROUTE information for Stand_sacroiliac_YawInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Stand_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3458 |
<!-- ROUTE information for Stand_vl5_YawInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Stand_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3459 |
<!-- ROUTE information for Stand_vc6_YawInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Stand_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 -1 0 0 0 0 -1 0 0 0 1 0 0'/> |
| 3460 |
<!-- ROUTE information for Stand_l_thumb1_PitchInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Stand_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3461 |
<!-- ROUTE information for Stand_r_thumb1_PitchInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 0.1 1 0 0 0.27 1 0 0 0.2 1 0 0 0'/> |
| 3462 |
<!-- ROUTE information for Stand_r_index1_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index1.rotation
]
[from value_changed to hanim_r_middle1.rotation
]
[from value_changed to hanim_r_ring1.rotation
]
[from value_changed to hanim_r_pinky1.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_index1_RollInterpolator' key='0 0.2 0.4 0.5 0.8 1' keyValue='0 0 1 0 0 0 1 0.1 0 0 1 0.2 0 0 1 0.3 0 0 1 0 0 0 1 0'/> |
| 3463 |
<!-- ROUTE information for Stand_r_index2_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index2.rotation
]
[from value_changed to hanim_r_middle2.rotation
]
[from value_changed to hanim_r_ring2.rotation
]
[from value_changed to hanim_r_pinky2.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_index2_RollInterpolator' key='0 0.2 0.4 0.5 0.8 1' keyValue='0 0 1 0 0 0 1 0.4 0 0 1 0.32 0 0 1 0.25 0 0 1 0.2 0 0 1 0'/> |
| 3464 |
<!-- ROUTE information for Stand_r_index3_RollInterpolator node:
[from StandTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_index3.rotation
]
[from value_changed to hanim_r_middle3.rotation
]
[from value_changed to hanim_r_ring3.rotation
]
[from value_changed to hanim_r_pinky3.rotation
]
-->
<OrientationInterpolator DEF='Stand_r_index3_RollInterpolator' key='0 0.2 0.4 0.5 0.8 1' keyValue='0 0 1 0 0 0 1 0.2 0 0 1 0.3 0 0 1 0.35 0 0 1 0.2 0 0 1 0'/> |
| 3465 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3466 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3467 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3468 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3469 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3470 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3471 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 3472 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3473 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3474 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3475 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3476 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3477 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3478 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_head_RotationInterpolator' toField='set_fraction'/> |
| 3479 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_neck_RotationInterpolator' toField='set_fraction'/> |
| 3480 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_eyeball_RotationInterpolator' toField='set_fraction'/> |
| 3481 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_eyeball_RotationInterpolator' toField='set_fraction'/> |
| 3482 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 3483 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 3484 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 3485 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3486 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3487 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3488 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3489 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3490 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3491 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_vl5_YawInterpolator' toField='set_fraction'/> |
| 3492 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_vc6_YawInterpolator' toField='set_fraction'/> |
| 3493 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3494 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3495 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_index1_RollInterpolator' toField='set_fraction'/> |
| 3496 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_index2_RollInterpolator' toField='set_fraction'/> |
| 3497 | < ROUTE fromNode='StandTimer' fromField='fraction_changed' toNode='Stand_r_index3_RollInterpolator' toField='set_fraction'/> |
| 3498 | < ROUTE fromNode='Stand_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3499 | < ROUTE fromNode='Stand_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3500 | < ROUTE fromNode='Stand_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3501 | < ROUTE fromNode='Stand_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3502 | < ROUTE fromNode='Stand_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3503 | < ROUTE fromNode='Stand_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3504 | < ROUTE fromNode='Stand_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3505 | < ROUTE fromNode='Stand_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3506 | < ROUTE fromNode='Stand_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3507 | < ROUTE fromNode='Stand_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3508 | < ROUTE fromNode='Stand_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3509 | < ROUTE fromNode='Stand_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3510 | < ROUTE fromNode='Stand_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3511 | < ROUTE fromNode='Stand_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc7' toField='rotation'/> |
| 3512 | < ROUTE fromNode='Stand_l_eyeball_RotationInterpolator' fromField='value_changed' toNode='hanim_l_eyeball_joint' toField='rotation'/> |
| 3513 | < ROUTE fromNode='Stand_r_eyeball_RotationInterpolator' fromField='value_changed' toNode='hanim_r_eyeball_joint' toField='rotation'/> |
| 3514 | < ROUTE fromNode='Stand_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3515 | < ROUTE fromNode='Stand_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3516 | < ROUTE fromNode='Stand_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3517 | < ROUTE fromNode='Stand_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3518 | < ROUTE fromNode='Stand_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3519 | < ROUTE fromNode='Stand_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3520 | < ROUTE fromNode='Stand_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3521 | < ROUTE fromNode='Stand_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3522 | < ROUTE fromNode='Stand_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3523 | < ROUTE fromNode='Stand_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3524 | < ROUTE fromNode='Stand_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3525 | < ROUTE fromNode='Stand_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3526 | < ROUTE fromNode='Stand_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3527 | < ROUTE fromNode='Stand_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3528 | < ROUTE fromNode='Stand_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3529 | < ROUTE fromNode='Stand_r_index1_RollInterpolator' fromField='value_changed' toNode='hanim_r_index1' toField='rotation'/> |
| 3530 | < ROUTE fromNode='Stand_r_index2_RollInterpolator' fromField='value_changed' toNode='hanim_r_index2' toField='rotation'/> |
| 3531 | < ROUTE fromNode='Stand_r_index3_RollInterpolator' fromField='value_changed' toNode='hanim_r_index3' toField='rotation'/> |
| 3532 | < ROUTE fromNode='Stand_r_index1_RollInterpolator' fromField='value_changed' toNode='hanim_r_middle1' toField='rotation'/> |
| 3533 | < ROUTE fromNode='Stand_r_index2_RollInterpolator' fromField='value_changed' toNode='hanim_r_middle2' toField='rotation'/> |
| 3534 | < ROUTE fromNode='Stand_r_index3_RollInterpolator' fromField='value_changed' toNode='hanim_r_middle3' toField='rotation'/> |
| 3535 | < ROUTE fromNode='Stand_r_index1_RollInterpolator' fromField='value_changed' toNode='hanim_r_ring1' toField='rotation'/> |
| 3536 | < ROUTE fromNode='Stand_r_index2_RollInterpolator' fromField='value_changed' toNode='hanim_r_ring2' toField='rotation'/> |
| 3537 | < ROUTE fromNode='Stand_r_index3_RollInterpolator' fromField='value_changed' toNode='hanim_r_ring3' toField='rotation'/> |
| 3538 | < ROUTE fromNode='Stand_r_index1_RollInterpolator' fromField='value_changed' toNode='hanim_r_pinky1' toField='rotation'/> |
| 3539 | < ROUTE fromNode='Stand_r_index2_RollInterpolator' fromField='value_changed' toNode='hanim_r_pinky2' toField='rotation'/> |
| 3540 | < ROUTE fromNode='Stand_r_index3_RollInterpolator' fromField='value_changed' toNode='hanim_r_pinky3' toField='rotation'/> |
| 3541 | </Group> |
| 3542 | <Group DEF='PitchesAnimation'> |
| 3543 |
<!-- ROUTE information for PitchTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to startTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Pitches_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Pitches_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Pitch_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Pitch_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Pitch_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Pitch_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Pitch_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Pitch_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Pitch_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Pitch_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Pitch_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Pitch_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='PitchTimer' cycleInterval='5.73' loop='true'/> |
| 3544 |
<!-- ROUTE information for Pitch_r_metatarsal_PitchInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Pitch_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='1 0 0 0 -1 0 0 0.5 -1 0 0 0.7 1 0 0 0.75 -1 0 0 0.2 1 0 0 0'/> |
| 3545 |
<!-- ROUTE information for Pitches_r_ankle_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 1 0 0 1.5 0 0 1 0 -1 0 0 1.5 0 0 1 0'/> |
| 3546 |
<!-- ROUTE information for Pitches_r_knee_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3547 |
<!-- ROUTE information for Pitches_r_hip_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_hip_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 -1 0 0 1.5 0 0 1 0 1 0 0 1.5 0 0 1 0'/> |
| 3548 |
<!-- ROUTE information for Pitches_l_ankle_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 -1 0 0 1.5 0 0 1 0 1 0 0 1.5 0 0 1 0'/> |
| 3549 |
<!-- ROUTE information for Pitches_l_knee_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3550 |
<!-- ROUTE information for Pitches_l_hip_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_hip_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 1 0 0 1.5 0 0 1 0 -1 0 0 1.5 0 0 1 0'/> |
| 3551 |
<!-- ROUTE information for Pitches_r_wrist_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3552 |
<!-- ROUTE information for Pitches_r_elbow_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3553 |
<!-- ROUTE information for Pitches_r_shoulder_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Pitches_r_shoulder_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 1 0 0 1.5 0 0 1 0 -1 0 0 1.5 0 0 1 0'/> |
| 3554 |
<!-- ROUTE information for Pitches_l_wrist_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3555 |
<!-- ROUTE information for Pitches_l_elbow_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3556 |
<!-- ROUTE information for Pitches_l_shoulder_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Pitches_l_shoulder_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 -1 0 0 1.5 0 0 1 0 1 0 0 1.5 0 0 1 0'/> |
| 3557 |
<!-- ROUTE information for Pitches_head_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Pitches_head_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3558 |
<!-- ROUTE information for Pitches_neck_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Pitches_neck_RotationInterpolator' key='0 0.25 0.55 1' keyValue='0 0 1 0 1 0 0 0.55 -1 0 0 1.05 0 0 1 0'/> |
| 3559 |
<!-- ROUTE information for Pitches_lower_body_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Pitches_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3560 |
<!-- ROUTE information for Pitches_upper_body_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Pitches_upper_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3561 |
<!-- ROUTE information for Pitches_whole_body_RotationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Pitches_whole_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3562 |
<!-- ROUTE information for Pitches_whole_body_TranslationInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Pitches_whole_body_TranslationInterpolator' key='0 0.125 0.25 0.375 0.5 0.625 0.75 0.875 1' keyValue='0 0 0 0 -0.15 0 0 -0.7 0 0 -0.15 0 0 0 0 0 -0.15 0 0 -0.7 0 0 -0.15 0 0 0 0'/> |
| 3563 |
<!-- ROUTE information for Pitch_l_sternoclavicular_RollInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Pitch_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3564 |
<!-- ROUTE information for Pitch_l_acromioclavicular_RollInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Pitch_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3565 |
<!-- ROUTE information for Pitch_r_sternoclavicular_RollInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Pitch_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3566 |
<!-- ROUTE information for Pitch_r_acromioclavicular_RollInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Pitch_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3567 |
<!-- ROUTE information for Pitch_sacroiliac_YawInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Pitch_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3568 |
<!-- ROUTE information for Pitch_vl5_YawInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Pitch_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3569 |
<!-- ROUTE information for Pitch_vc6_YawInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Pitch_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3570 |
<!-- ROUTE information for Pitch_l_thumb1_PitchInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Pitch_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.3 1 0 0 0.27 1 0 0 0.2 1 0 0 0'/> |
| 3571 |
<!-- ROUTE information for Pitch_r_thumb1_PitchInterpolator node:
[from PitchTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Pitch_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.3 1 0 0 0.27 1 0 0 0.2 1 0 0 0'/> |
| 3572 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3573 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3574 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3575 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3576 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3577 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3578 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 3579 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3580 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3581 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3582 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3583 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3584 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3585 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_head_RotationInterpolator' toField='set_fraction'/> |
| 3586 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_neck_RotationInterpolator' toField='set_fraction'/> |
| 3587 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 3588 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 3589 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitches_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 3590 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3591 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3592 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3593 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3594 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3595 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3596 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_vl5_YawInterpolator' toField='set_fraction'/> |
| 3597 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_vc6_YawInterpolator' toField='set_fraction'/> |
| 3598 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3599 | < ROUTE fromNode='PitchTimer' fromField='fraction_changed' toNode='Pitch_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3600 | < ROUTE fromNode='Pitches_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3601 | < ROUTE fromNode='Pitches_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3602 | < ROUTE fromNode='Pitches_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3603 | < ROUTE fromNode='Pitches_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3604 | < ROUTE fromNode='Pitches_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3605 | < ROUTE fromNode='Pitches_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3606 | < ROUTE fromNode='Pitches_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3607 | < ROUTE fromNode='Pitches_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3608 | < ROUTE fromNode='Pitches_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3609 | < ROUTE fromNode='Pitches_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3610 | < ROUTE fromNode='Pitches_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3611 | < ROUTE fromNode='Pitches_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3612 | < ROUTE fromNode='Pitches_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3613 | < ROUTE fromNode='Pitches_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3614 | < ROUTE fromNode='Pitches_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3615 | < ROUTE fromNode='Pitches_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3616 | < ROUTE fromNode='Pitches_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3617 | < ROUTE fromNode='Pitches_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3618 | < ROUTE fromNode='Pitch_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3619 | < ROUTE fromNode='Pitch_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3620 | < ROUTE fromNode='Pitch_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3621 | < ROUTE fromNode='Pitch_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3622 | < ROUTE fromNode='Pitch_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3623 | < ROUTE fromNode='Pitch_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3624 | < ROUTE fromNode='Pitch_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3625 | < ROUTE fromNode='Pitch_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3626 | < ROUTE fromNode='Pitch_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3627 | < ROUTE fromNode='Pitch_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3628 | < ROUTE fromNode='Pitch_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3629 | </Group> |
| 3630 | <Group DEF='YawsAnimation'> |
| 3631 |
<!-- ROUTE information for YawTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to startTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Yaws_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Yaws_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Yaw_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Yaw_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Yaw_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Yaw_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Yaw_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Yaw_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Yaw_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Yaw_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Yaw_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Yaw_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='YawTimer' cycleInterval='5.73' loop='true'/> |
| 3632 |
<!-- ROUTE information for Yaw_r_metatarsal_PitchInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Yaw_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3633 |
<!-- ROUTE information for Yaws_r_ankle_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 -1 0 1.5 0 0 1 0 0 1 0 1.5 0 0 1 0'/> |
| 3634 |
<!-- ROUTE information for Yaws_r_knee_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_knee_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 1 0 1.5 0 0 1 0 0 -1 0 1.5 0 0 1 0'/> |
| 3635 |
<!-- ROUTE information for Yaws_r_hip_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3636 |
<!-- ROUTE information for Yaws_l_ankle_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 1 0 1.5 0 0 1 0 0 -1 0 1.5 0 0 1 0'/> |
| 3637 |
<!-- ROUTE information for Yaws_l_knee_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_knee_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 -1 0 1.5 0 0 1 0 0 1 0 1.5 0 0 1 0'/> |
| 3638 |
<!-- ROUTE information for Yaws_l_hip_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_hip_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3639 |
<!-- ROUTE information for Yaws_r_wrist_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3640 |
<!-- ROUTE information for Yaws_r_elbow_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3641 |
<!-- ROUTE information for Yaws_r_shoulder_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Yaws_r_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3642 |
<!-- ROUTE information for Yaws_l_wrist_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_wrist_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3643 |
<!-- ROUTE information for Yaws_l_elbow_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3644 |
<!-- ROUTE information for Yaws_l_shoulder_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Yaws_l_shoulder_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3645 |
<!-- ROUTE information for Yaws_head_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Yaws_head_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3646 |
<!-- ROUTE information for Yaws_neck_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Yaws_neck_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 1 0 1.5 0 0 1 0 0 -1 0 1.5 0 0 1 0'/> |
| 3647 |
<!-- ROUTE information for Yaws_upper_body_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Yaws_upper_body_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 -1 0 1.5 0 0 1 0 0 1 0 1.5 0 0 1 0'/> |
| 3648 |
<!-- ROUTE information for Yaws_lower_body_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Yaws_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3649 |
<!-- ROUTE information for Yaws_whole_body_RotationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Yaws_whole_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3650 |
<!-- ROUTE information for Yaws_whole_body_TranslationInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Yaws_whole_body_TranslationInterpolator' key='0 0.5 1' keyValue='0 0 0 0 0 0 0 0 0'/> |
| 3651 |
<!-- ROUTE information for Yaw_l_sternoclavicular_RollInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Yaw_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3652 |
<!-- ROUTE information for Yaw_l_acromioclavicular_RollInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Yaw_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3653 |
<!-- ROUTE information for Yaw_r_sternoclavicular_RollInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Yaw_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3654 |
<!-- ROUTE information for Yaw_r_acromioclavicular_RollInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Yaw_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3655 |
<!-- ROUTE information for Yaw_sacroiliac_YawInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Yaw_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 1 0 0 0 -1 0 0.1 0 1 0 0 0 1 0 0.24 0 -1 0 0.4 0 1 0 0'/> |
| 3656 |
<!-- ROUTE information for Yaw_vl5_YawInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Yaw_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3657 |
<!-- ROUTE information for Yaw_vc6_YawInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Yaw_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3658 |
<!-- ROUTE information for Yaw_l_thumb1_PitchInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Yaw_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3659 |
<!-- ROUTE information for Yaw_r_thumb1_PitchInterpolator node:
[from YawTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Yaw_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3660 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3661 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3662 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3663 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3664 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3665 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3666 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 3667 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3668 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3669 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3670 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3671 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3672 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3673 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_head_RotationInterpolator' toField='set_fraction'/> |
| 3674 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_neck_RotationInterpolator' toField='set_fraction'/> |
| 3675 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 3676 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 3677 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaws_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 3678 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3679 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3680 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3681 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3682 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3683 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3684 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_vl5_YawInterpolator' toField='set_fraction'/> |
| 3685 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_vc6_YawInterpolator' toField='set_fraction'/> |
| 3686 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3687 | < ROUTE fromNode='YawTimer' fromField='fraction_changed' toNode='Yaw_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3688 | < ROUTE fromNode='Yaws_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3689 | < ROUTE fromNode='Yaws_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3690 | < ROUTE fromNode='Yaws_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3691 | < ROUTE fromNode='Yaws_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3692 | < ROUTE fromNode='Yaws_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3693 | < ROUTE fromNode='Yaws_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3694 | < ROUTE fromNode='Yaws_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3695 | < ROUTE fromNode='Yaws_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3696 | < ROUTE fromNode='Yaws_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3697 | < ROUTE fromNode='Yaws_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3698 | < ROUTE fromNode='Yaws_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3699 | < ROUTE fromNode='Yaws_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3700 | < ROUTE fromNode='Yaws_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3701 | < ROUTE fromNode='Yaws_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3702 | < ROUTE fromNode='Yaws_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3703 | < ROUTE fromNode='Yaws_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3704 | < ROUTE fromNode='Yaws_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3705 | < ROUTE fromNode='Yaws_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3706 | < ROUTE fromNode='Yaw_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3707 | < ROUTE fromNode='Yaw_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3708 | < ROUTE fromNode='Yaw_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3709 | < ROUTE fromNode='Yaw_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3710 | < ROUTE fromNode='Yaw_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3711 | < ROUTE fromNode='Yaw_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3712 | < ROUTE fromNode='Yaw_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3713 | < ROUTE fromNode='Yaw_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3714 | < ROUTE fromNode='Yaw_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3715 | < ROUTE fromNode='Yaw_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3716 | < ROUTE fromNode='Yaw_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3717 | </Group> |
| 3718 | <Group DEF='RollsAnimation'> |
| 3719 |
<!-- ROUTE information for RollTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to startTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Rolls_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Rolls_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Roll_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Roll_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Roll_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Roll_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Roll_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Roll_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Roll_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Roll_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Roll_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Roll_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='RollTimer' cycleInterval='5.73' loop='true'/> |
| 3720 |
<!-- ROUTE information for Roll_r_metatarsal_PitchInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Roll_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3721 |
<!-- ROUTE information for Rolls_r_ankle_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 1 1.5 0 0 1 0 0 0 1 1.5 0 0 1 0'/> |
| 3722 |
<!-- ROUTE information for Rolls_r_knee_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3723 |
<!-- ROUTE information for Rolls_r_hip_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_hip_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 -1 0 0 0 -1 1.5 0 0 1 0 0 0 -1 1.5 0 0 1 0'/> |
| 3724 |
<!-- ROUTE information for Rolls_l_ankle_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_ankle_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 -1 1.5 0 0 1 0 0 0 -1 1.5 0 0 1 0'/> |
| 3725 |
<!-- ROUTE information for Rolls_l_knee_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_knee_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3726 |
<!-- ROUTE information for Rolls_l_hip_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_hip_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 1 1.5 0 0 1 0 0 0 1 1.5 0 0 1 0'/> |
| 3727 |
<!-- ROUTE information for Rolls_r_wrist_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_wrist_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 -1 1.5 0 0 1 0 0 0 1 1.5 0 0 1 0'/> |
| 3728 |
<!-- ROUTE information for Rolls_r_elbow_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3729 |
<!-- ROUTE information for Rolls_r_shoulder_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Rolls_r_shoulder_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 -1 1.5 0 0 -1 3 0 0 -1 1.5 0 0 1 0'/> |
| 3730 |
<!-- ROUTE information for Rolls_l_wrist_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_wrist_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 1 1.5 0 0 1 0 0 0 -1 1.5 0 0 1 0'/> |
| 3731 |
<!-- ROUTE information for Rolls_l_elbow_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_elbow_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3732 |
<!-- ROUTE information for Rolls_l_shoulder_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Rolls_l_shoulder_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 1 1.5 0 0 1 3 0 0 1 1.5 0 0 1 0'/> |
| 3733 |
<!-- ROUTE information for Rolls_head_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Rolls_head_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3734 |
<!-- ROUTE information for Rolls_neck_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Rolls_neck_RotationInterpolator' key='0 0.25 0.5 0.75 1' keyValue='0 0 1 0 0 0 1 1.25 0 0 1 0 0 0 -1 1.25 0 0 1 0'/> |
| 3735 |
<!-- ROUTE information for Rolls_lower_body_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Rolls_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3736 |
<!-- ROUTE information for Rolls_upper_body_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Rolls_upper_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3737 |
<!-- ROUTE information for Rolls_whole_body_RotationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Rolls_whole_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3738 |
<!-- ROUTE information for Rolls_whole_body_TranslationInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Rolls_whole_body_TranslationInterpolator' key='0 0.125 0.25 0.375 0.5 0.625 0.75 0.875 1' keyValue='0 0 0 0 -0.25 0 0 -0.8 0 0 -0.25 0 0 0 0 0 -0.25 0 0 -0.8 0 0 -0.25 0 0 0 0'/> |
| 3739 |
<!-- ROUTE information for Roll_l_sternoclavicular_RollInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Roll_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0.2 0 0 1 0.22 0 0 1 0.2 0 0 1 0 0 0 1 0'/> |
| 3740 |
<!-- ROUTE information for Roll_l_acromioclavicular_RollInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Roll_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3741 |
<!-- ROUTE information for Roll_r_sternoclavicular_RollInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Roll_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 -0.2 0 0 1 -0.22 0 0 1 -0.2 0 0 1 0 0 0 1 0'/> |
| 3742 |
<!-- ROUTE information for Roll_r_acromioclavicular_RollInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Roll_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 -0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3743 |
<!-- ROUTE information for Roll_sacroiliac_YawInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Roll_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3744 |
<!-- ROUTE information for Roll_vl5_YawInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Roll_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3745 |
<!-- ROUTE information for Roll_vc6_YawInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Roll_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3746 |
<!-- ROUTE information for Roll_l_thumb1_PitchInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Roll_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3747 |
<!-- ROUTE information for Roll_r_thumb1_PitchInterpolator node:
[from RollTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Roll_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3748 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3749 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3750 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3751 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3752 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3753 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3754 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 3755 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3756 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3757 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3758 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3759 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3760 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3761 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_head_RotationInterpolator' toField='set_fraction'/> |
| 3762 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_neck_RotationInterpolator' toField='set_fraction'/> |
| 3763 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 3764 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 3765 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Rolls_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 3766 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3767 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3768 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3769 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3770 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3771 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3772 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_vl5_YawInterpolator' toField='set_fraction'/> |
| 3773 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_vc6_YawInterpolator' toField='set_fraction'/> |
| 3774 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3775 | < ROUTE fromNode='RollTimer' fromField='fraction_changed' toNode='Roll_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3776 | < ROUTE fromNode='Rolls_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3777 | < ROUTE fromNode='Rolls_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3778 | < ROUTE fromNode='Rolls_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3779 | < ROUTE fromNode='Rolls_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3780 | < ROUTE fromNode='Rolls_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3781 | < ROUTE fromNode='Rolls_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3782 | < ROUTE fromNode='Rolls_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3783 | < ROUTE fromNode='Rolls_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3784 | < ROUTE fromNode='Rolls_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3785 | < ROUTE fromNode='Rolls_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3786 | < ROUTE fromNode='Rolls_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3787 | < ROUTE fromNode='Rolls_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3788 | < ROUTE fromNode='Rolls_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3789 | < ROUTE fromNode='Rolls_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3790 | < ROUTE fromNode='Rolls_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3791 | < ROUTE fromNode='Rolls_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3792 | < ROUTE fromNode='Rolls_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3793 | < ROUTE fromNode='Rolls_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3794 | < ROUTE fromNode='Roll_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3795 | < ROUTE fromNode='Roll_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3796 | < ROUTE fromNode='Roll_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3797 | < ROUTE fromNode='Roll_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3798 | < ROUTE fromNode='Roll_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3799 | < ROUTE fromNode='Roll_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3800 | < ROUTE fromNode='Roll_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3801 | < ROUTE fromNode='Roll_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3802 | < ROUTE fromNode='Roll_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3803 | < ROUTE fromNode='Roll_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3804 | < ROUTE fromNode='Roll_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3805 | </Group> |
| 3806 | <Group DEF='WalkAnimation'> |
| 3807 |
<!-- ROUTE information for WalkTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to startTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Walk_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Walk_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Walk_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Walk_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Walk_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Walk_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Walk_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Walk_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Walk_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Walk_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Walk_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Walk_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='WalkTimer' cycleInterval='1.73' loop='true'/> |
| 3808 |
<!-- ROUTE information for Walk_r_metatarsal_PitchInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3809 |
<!-- ROUTE information for Walk_r_ankle_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_ankle_RotationInterpolator' key='0 0.125 0.2083 0.375 0.4583 0.5 0.6667 0.75 0.7917 0.9167 1' keyValue='0 0 1 0 -1 0 0 0.3533 -1 0 0 0.1072 1 0 0 0.2612 1 0 0 0.1268 -1 0 0 0.0179 -1 0 0 0.0582 -1 0 0 0.2398 -1 0 0 0.35 -1 0 0 0.3322 0 0 1 0'/> |
| 3810 |
<!-- ROUTE information for Walk_r_knee_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_knee_RotationInterpolator' key='0 0.125 0.2083 0.2917 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='1 0 0 0.8573 1 0 0 0.8926 1 0 0 0.5351 1 0 0 0.1756 1 0 0 0.1194 1 0 0 0.3153 1 0 0 0.0935 1 0 0 0.0856 1 0 0 0.2475 1 0 0 0.8573'/> |
| 3811 |
<!-- ROUTE information for Walk_r_hip_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_hip_RotationInterpolator' key='0 0.125 0.2083 0.2917 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='-0.5831 0.0351 0.8116 0.1481 -0.995 0.023 0.0967 0.4683 -1 0.0019 0.008 0.4732 -0.998 -0.0158 -0.061 0.5079 -0.9911 -0.0354 -0.1286 0.5419 -0.9131 -0.0624 -0.403 0.3361 -0.4306 -0.0796 -0.899 0.0704 1 0 0 0.2571 0.9891 -0.0281 0.1444 0.3879 -0.5831 0.0351 0.8116 0.1481'/> |
| 3812 |
<!-- ROUTE information for Walk_l_ankle_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_ankle_RotationInterpolator' key='0 0.125 0.2083 0.375 0.6667 0.9167 1' keyValue='-1 0 0 0.0671 -1 0 0 0.2152 -1 0 0 0.3184 -1 0 0 0.4717 -1 0 0 0.2912 1 0 0 0.1222 -1 0 0 0.0671'/> |
| 3813 |
<!-- ROUTE information for Walk_l_knee_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_knee_RotationInterpolator' key='0 0.2083 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='1 0 0 0.3226 1 0 0 0.1556 1 0 0 0.0868 1 0 0 0.8751 1 0 0 1.131 1 0 0 0.0996 1 0 0 0.3942 1 0 0 0.3226'/> |
| 3814 |
<!-- ROUTE information for Walk_l_hip_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_hip_RotationInterpolator' key='0 0.25 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='-0.873 0.0609 0.484 0.2865 0.9963 -0.0106 0.0848 0.2488 0.9965 0.0159 -0.0822 0.3836 -0.7018 -0.0322 -0.7117 0.1289 -1 0 0 0.5518 -0.9964 0.0223 0.0817 0.5351 -0.9809 0.0491 0.1881 0.5204 -0.873 0.0609 0.484 0.2865'/> |
| 3815 |
<!-- ROUTE information for Walk_lower_body_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Walk_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 -1 0.1056 0 0 1 0.0902 0 0 -1 0.1056'/> |
| 3816 |
<!-- ROUTE information for Walk_r_wrist_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_wrist_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='-0.8129 0.4759 -0.3357 0.1346 0.1533 -0.9878 0.0258 0.3902 -0.5701 0.7604 -0.311 0.366 -0.8129 0.4759 -0.3357 0.1346'/> |
| 3817 |
<!-- ROUTE information for Walk_r_elbow_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_elbow_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='-1 0 0 0.4115 -1 0 0 0.0925 -1 0 0 0.5726 -1 0 0 0.4115'/> |
| 3818 |
<!-- ROUTE information for Walk_r_shoulder_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_shoulder_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='-1 0 0 0.0935 1 0 0 0.3197 -1 0 0 0.1564 -1 0 0 0.0935'/> |
| 3819 |
<!-- ROUTE information for Walk_l_wrist_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_wrist_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='0 -1 0 0.4611 -0.3302 -0.9275 0.1755 0.5389 0.0328 -0.9993 -0.0172 0.492 0 -1 0 0.4611'/> |
| 3820 |
<!-- ROUTE information for Walk_l_elbow_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_elbow_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='-1 0 0 0.066 -1 0 0 0.4884 -1 0 0 0.0178 -1 0 0 0.066'/> |
| 3821 |
<!-- ROUTE information for Walk_l_shoulder_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_shoulder_RotationInterpolator' key='0 0.375 0.9167 1' keyValue='1 0 0 0.1189 -1 0 0 0.1861 1 0 0 0.3357 1 0 0 0.1189'/> |
| 3822 |
<!-- ROUTE information for Walk_head_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Walk_head_RotationInterpolator' key='0 0.375 0.4167 0.5 0.5833 0.6667 0.75 0.8333 0.9167 1' keyValue='0 -1 0 0.0864 0 1 0 0.1825 0 1 0 0.1505 0 1 0 0.1053 0 1 0 0.0439 0 -1 0 0.0312 0 -1 0 0.0794 0 -1 0 0.1616 0 -1 0 0.155 0 -1 0 0.0864'/> |
| 3823 |
<!-- ROUTE information for Walk_neck_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Walk_neck_RotationInterpolator' key='0 1' keyValue='0 0 1 0 0 0 1 0'/> |
| 3824 |
<!-- ROUTE information for Walk_upper_body_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Walk_upper_body_RotationInterpolator' key='0 0.2083 0.375 0.75 0.8333 1' keyValue='0 1 0 0.0826 -0.0197 -0.5974 0.8017 0.0823 0.0093 -0.9648 0.2627 0.1734 -0.0124 0.9549 -0.2968 0.0873 -0.0081 0.9691 -0.2463 0.158 0 1 0 0.0826'/> |
| 3825 |
<!-- ROUTE information for Walk_whole_body_RotationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Walk_whole_body_RotationInterpolator' key='0 1' keyValue='0 0 1 0 0 0 1 0'/> |
| 3826 |
<!-- ROUTE information for Walk_whole_body_TranslationInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Walk_whole_body_TranslationInterpolator' key='0 0.0417 0.125 0.1667 0.2083 0.25 0.2917 0.375 0.4583 0.5 0.5417 0.5833 0.625 0.7083 0.75 0.7917 0.875 0.9167 1' keyValue='0 -0.0093 0 0 -0.0039 0 0 -0.0088 0 0 -0.0149 0 0 -0.0264 0 0 -0.0393 0 0 -0.0502 0 0 -0.0747 0 0 -0.0273 0 0 -0.0161 0 0 -0.0113 0 0 -0.0058 0 0 -0.002 0 0 -0.0026 0 0 -0.0143 0 0 -0.038 0 0 -0.0565 0 0 -0.045 0 0 -0.0093 0'/> |
| 3827 |
<!-- ROUTE information for Walk_l_sternoclavicular_RollInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3828 |
<!-- ROUTE information for Walk_l_acromioclavicular_RollInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3829 |
<!-- ROUTE information for Walk_r_sternoclavicular_RollInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3830 |
<!-- ROUTE information for Walk_r_acromioclavicular_RollInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3831 |
<!-- ROUTE information for Walk_sacroiliac_YawInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Walk_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3832 |
<!-- ROUTE information for Walk_vl5_YawInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Walk_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3833 |
<!-- ROUTE information for Walk_vc6_YawInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Walk_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3834 |
<!-- ROUTE information for Walk_l_thumb1_PitchInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Walk_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.5 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 3835 |
<!-- ROUTE information for Walk_r_thumb1_PitchInterpolator node:
[from WalkTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Walk_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.5 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 3836 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3837 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 3838 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 3839 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 3840 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 3841 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 3842 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 3843 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3844 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3845 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3846 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 3847 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 3848 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 3849 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_head_RotationInterpolator' toField='set_fraction'/> |
| 3850 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_neck_RotationInterpolator' toField='set_fraction'/> |
| 3851 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 3852 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 3853 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 3854 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3855 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3856 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3857 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3858 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3859 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3860 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_vl5_YawInterpolator' toField='set_fraction'/> |
| 3861 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_vc6_YawInterpolator' toField='set_fraction'/> |
| 3862 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3863 | < ROUTE fromNode='WalkTimer' fromField='fraction_changed' toNode='Walk_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3864 | < ROUTE fromNode='Walk_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3865 | < ROUTE fromNode='Walk_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3866 | < ROUTE fromNode='Walk_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3867 | < ROUTE fromNode='Walk_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3868 | < ROUTE fromNode='Walk_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3869 | < ROUTE fromNode='Walk_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3870 | < ROUTE fromNode='Walk_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3871 | < ROUTE fromNode='Walk_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3872 | < ROUTE fromNode='Walk_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3873 | < ROUTE fromNode='Walk_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3874 | < ROUTE fromNode='Walk_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3875 | < ROUTE fromNode='Walk_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3876 | < ROUTE fromNode='Walk_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3877 | < ROUTE fromNode='Walk_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3878 | < ROUTE fromNode='Walk_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3879 | < ROUTE fromNode='Walk_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3880 | < ROUTE fromNode='Walk_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3881 | < ROUTE fromNode='Walk_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3882 | < ROUTE fromNode='Walk_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3883 | < ROUTE fromNode='Walk_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3884 | < ROUTE fromNode='Walk_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3885 | < ROUTE fromNode='Walk_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3886 | < ROUTE fromNode='Walk_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3887 | < ROUTE fromNode='Walk_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3888 | < ROUTE fromNode='Walk_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3889 | < ROUTE fromNode='Walk_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3890 | < ROUTE fromNode='Walk_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3891 | < ROUTE fromNode='Walk_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3892 | < ROUTE fromNode='Walk_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3893 | </Group> |
| 3894 | <Group DEF='RunAnimation'> |
| 3895 |
<!-- ROUTE information for RunTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to startTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Run_r_ankle_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_r_knee_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_r_hip_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_ankle_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_knee_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_hip_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_lower_body_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_r_wrist_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_r_elbow_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_r_shoulder_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_wrist_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_elbow_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_shoulder_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_head_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_neck_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_upper_body_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_whole_body_RotationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_whole_body_TranslationInterpolator_Run.set_fraction
]
[from fraction_changed to Run_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Run_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Run_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Run_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Run_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Run_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Run_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Run_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Run_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Run_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='RunTimer' cycleInterval='0.9' loop='true'/> |
| 3896 |
<!-- ROUTE information for Run_r_metatarsal_PitchInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Run_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3897 |
<!-- ROUTE information for Run_l_hip_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Run_l_hip_RotationInterpolator_Run' key='0 0.2182 0.4909 0.7455 1' keyValue='-0.99 0.033 0.04 1.42 -0.99 0.1328 0.067 0.42 0.99 0.014 0.009 0.9 -0.99 0.0703 0.05 0.7 -0.99 0.033 0.04 1.42'/> |
| 3898 |
<!-- ROUTE information for Run_l_knee_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Run_l_knee_RotationInterpolator_Run' key='0 0.2182 0.4909 0.7455 1' keyValue='1 0 0 1.01 1 0 0 0.426 1 0 0 0.705 1 0 0 2.179 1 0 0 1.01'/> |
| 3899 |
<!-- ROUTE information for Run_l_ankle_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Run_l_ankle_RotationInterpolator_Run' key='0 0.22 0.3 0.4 1' keyValue='1 0 0 0.0374 -1 0 0 0.1037 -1 0 0 0.4328 1 0 0 0.1929 1 0 0 0.0357'/> |
| 3900 |
<!-- ROUTE information for Run_r_hip_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Run_r_hip_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='0.99 -0.014 0.009 0.9 -0.99 -0.0703 -0.05 0.7 -0.99 -0.033 0.04 1.42 -0.99 -0.1328 -0.067 0.42 0.99 -0.014 0.009 0.9'/> |
| 3901 |
<!-- ROUTE information for Run_r_knee_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Run_r_knee_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='1 0 0 0.705 1 0 0 2.179 1 0 0 1.01 1 0 0 0.426 1 0 0 0.705'/> |
| 3902 |
<!-- ROUTE information for Run_r_ankle_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Run_r_ankle_RotationInterpolator_Run' key='0 0.4 0.71 0.8 0.82 1' keyValue='1 0 0 0.2323 -1 0 0 0.0784 -1 0 0 0.32 -1 0 0 0.374 -1 0 0 0.3478 1 0 0 0.2323'/> |
| 3903 |
<!-- ROUTE information for Run_l_shoulder_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Run_l_shoulder_RotationInterpolator_Run' key='0 0.2182 0.4909 0.7455 1' keyValue='0.99 -0.074 0.25 1.5 0.99 -0.092 0.44 0.3 -0.99 0.136 0.25 0.85 0.99 -0.081 0.38 0.4 0.99 -0.074 0.25 1.5'/> |
| 3904 |
<!-- ROUTE information for Run_l_elbow_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Run_l_elbow_RotationInterpolator_Run' key='0 0.2182 0.4909 0.7455 1' keyValue='-1 0 0 1.85 -0.99 -0.19 0.18 1.35 -1 0 0 0.975 -0.99 -0.09 -0.02 1.55 -1 0 0 1.85'/> |
| 3905 |
<!-- ROUTE information for Run_l_wrist_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Run_l_wrist_RotationInterpolator_Run' key='0 0.25 0.5 0.75 1' keyValue='-0.25 -1 0.08 0.14 0.25 1 0.08 0.14 0 0 1 0 -0.25 1 0.08 -0.14 -0.25 1 0.08 0.14'/> |
| 3906 |
<!-- ROUTE information for Run_r_shoulder_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Run_r_shoulder_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='-0.99 -0.136 -0.25 0.85 0.99 0.081 -0.38 0.4 0.99 0.074 -0.25 1.5 0.99 0.081 -0.38 0.4 -0.99 -0.136 -0.25 0.85'/> |
| 3907 |
<!-- ROUTE information for Run_r_elbow_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Run_r_elbow_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='-1 0 0 0.975 -0.99 0.09 0.02 1.55 -1 0 0 1.85 -0.99 0.19 -0.18 1.35 -1 0 0 0.975'/> |
| 3908 |
<!-- ROUTE information for Run_r_wrist_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Run_r_wrist_RotationInterpolator_Run' key='0 1' keyValue='-0.9177 -0.2372 -0.3185 0.2143 -0.9177 -0.2372 -0.3185 0.2143'/> |
| 3909 |
<!-- ROUTE information for Run_lower_body_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Run_lower_body_RotationInterpolator_Run' key='0 0.2182 0.4909 0.7455 1' keyValue='0 -1 0 0.125 0 0 1 0 0 1 0 0.125 0 0 1 0 0 -1 0 0.125'/> |
| 3910 |
<!-- ROUTE information for Run_head_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Run_head_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='1 0 0 0.08 1 0 0 0.12 1 0 0 0.3 1 0 0 0.3 1 0 0 0.08'/> |
| 3911 |
<!-- ROUTE information for Run_neck_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Run_neck_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7091 1' keyValue='0.7 0 0 0.4 -0.7 -0.7 0 0.4 0 0 0 0.4 -0.7 0.7 0 0.4 0.7 0 0 0.4'/> |
| 3912 |
<!-- ROUTE information for Run_upper_body_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Run_upper_body_RotationInterpolator_Run' key='0 0.2545 0.4909 0.7636 1' keyValue='0.97 0.65 0.086 0.5 0.9 0.003 -0.02 0.38 0.95 -0.68 -0.086 0.5 0.9 0.004 -0.025 0.4 0.97 0.65 0.086 0.5'/> |
| 3913 |
<!-- ROUTE information for Run_whole_body_RotationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Run_whole_body_RotationInterpolator_Run' key='0 0.25 0.5 0.75 1' keyValue='1 0 0 0.06 1 0 0 0.167 1 0 0 0.06 1 0 0 0.168 1 0 0 0.06'/> |
| 3914 |
<!-- ROUTE information for Run_whole_body_TranslationInterpolator_Run node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Run_whole_body_TranslationInterpolator_Run' key='0 0.22 0.3 0.31 0.5 0.69 0.7 0.78 1' keyValue='0 -0.01 0 0 -0.037 0 0 -0.049 0 0 -0.037 0 0 -0.01 0 0 -0.037 0 0 -0.049 0 0 -0.037 0 0 -0.01 0'/> |
| 3915 |
<!-- ROUTE information for Run_l_sternoclavicular_RollInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Run_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3916 |
<!-- ROUTE information for Run_l_acromioclavicular_RollInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Run_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3917 |
<!-- ROUTE information for Run_r_sternoclavicular_RollInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Run_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3918 |
<!-- ROUTE information for Run_r_acromioclavicular_RollInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Run_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3919 |
<!-- ROUTE information for Run_sacroiliac_YawInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Run_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3920 |
<!-- ROUTE information for Run_vl5_YawInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Run_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3921 |
<!-- ROUTE information for Run_vc6_YawInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Run_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3922 |
<!-- ROUTE information for Run_l_thumb1_PitchInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Run_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.7 1 0 0 0.27 1 0 0 0.2 1 0 0 0'/> |
| 3923 |
<!-- ROUTE information for Run_r_thumb1_PitchInterpolator node:
[from RunTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Run_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.25 1 0 0 0.7 1 0 0 0.27 1 0 0 0.2 1 0 0 0'/> |
| 3924 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_ankle_RotationInterpolator_Run' toField='set_fraction'/> |
| 3925 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_knee_RotationInterpolator_Run' toField='set_fraction'/> |
| 3926 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_hip_RotationInterpolator_Run' toField='set_fraction'/> |
| 3927 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_ankle_RotationInterpolator_Run' toField='set_fraction'/> |
| 3928 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_knee_RotationInterpolator_Run' toField='set_fraction'/> |
| 3929 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_hip_RotationInterpolator_Run' toField='set_fraction'/> |
| 3930 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_lower_body_RotationInterpolator_Run' toField='set_fraction'/> |
| 3931 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_wrist_RotationInterpolator_Run' toField='set_fraction'/> |
| 3932 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_elbow_RotationInterpolator_Run' toField='set_fraction'/> |
| 3933 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_shoulder_RotationInterpolator_Run' toField='set_fraction'/> |
| 3934 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_wrist_RotationInterpolator_Run' toField='set_fraction'/> |
| 3935 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_elbow_RotationInterpolator_Run' toField='set_fraction'/> |
| 3936 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_shoulder_RotationInterpolator_Run' toField='set_fraction'/> |
| 3937 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_head_RotationInterpolator_Run' toField='set_fraction'/> |
| 3938 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_neck_RotationInterpolator_Run' toField='set_fraction'/> |
| 3939 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_upper_body_RotationInterpolator_Run' toField='set_fraction'/> |
| 3940 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_whole_body_RotationInterpolator_Run' toField='set_fraction'/> |
| 3941 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_whole_body_TranslationInterpolator_Run' toField='set_fraction'/> |
| 3942 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3943 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3944 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 3945 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 3946 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 3947 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 3948 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_vl5_YawInterpolator' toField='set_fraction'/> |
| 3949 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_vc6_YawInterpolator' toField='set_fraction'/> |
| 3950 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3951 | < ROUTE fromNode='RunTimer' fromField='fraction_changed' toNode='Run_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 3952 | < ROUTE fromNode='Run_r_ankle_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 3953 | < ROUTE fromNode='Run_r_knee_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 3954 | < ROUTE fromNode='Run_r_hip_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 3955 | < ROUTE fromNode='Run_l_ankle_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 3956 | < ROUTE fromNode='Run_l_knee_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 3957 | < ROUTE fromNode='Run_l_hip_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 3958 | < ROUTE fromNode='Run_r_wrist_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 3959 | < ROUTE fromNode='Run_r_elbow_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 3960 | < ROUTE fromNode='Run_r_shoulder_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 3961 | < ROUTE fromNode='Run_l_wrist_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 3962 | < ROUTE fromNode='Run_l_elbow_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 3963 | < ROUTE fromNode='Run_l_shoulder_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 3964 | < ROUTE fromNode='Run_lower_body_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3965 | < ROUTE fromNode='Run_head_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 3966 | < ROUTE fromNode='Run_neck_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 3967 | < ROUTE fromNode='Run_upper_body_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 3968 | < ROUTE fromNode='Run_whole_body_RotationInterpolator_Run' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 3969 | < ROUTE fromNode='Run_whole_body_TranslationInterpolator_Run' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 3970 | < ROUTE fromNode='Run_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 3971 | < ROUTE fromNode='Run_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 3972 | < ROUTE fromNode='Run_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 3973 | < ROUTE fromNode='Run_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 3974 | < ROUTE fromNode='Run_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 3975 | < ROUTE fromNode='Run_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 3976 | < ROUTE fromNode='Run_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 3977 | < ROUTE fromNode='Run_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 3978 | < ROUTE fromNode='Run_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 3979 | < ROUTE fromNode='Run_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 3980 | < ROUTE fromNode='Run_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 3981 | </Group> |
| 3982 | <Group DEF='JumpAnimation'> |
| 3983 |
<!-- ROUTE information for JumpTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to startTime
]
[from Kick_Touch.touchTime to stopTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Jump_r_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_r_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_r_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_ankle_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_knee_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_hip_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_r_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_r_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_r_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_wrist_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_elbow_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_shoulder_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_head_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_neck_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Jump_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Jump_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Jump_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Jump_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Jump_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Jump_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Jump_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Jump_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Jump_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Jump_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Jump_r_thumb1_PitchInterpolator.set_fraction
]
-->
<TimeSensor DEF='JumpTimer' cycleInterval='3.73' loop='true'/> |
| 3984 |
<!-- ROUTE information for Jump_r_metatarsal_PitchInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_metatarsal.rotation
]
[from value_changed to hanim_r_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3985 |
<!-- ROUTE information for Jump_r_ankle_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_ankle_RotationInterpolator' key='0 0.1 0.15 0.25 0.28 0.32 0.35 0.64 0.76 0.84 0.88 0.92 0.96 1' keyValue='0 0 1 0 -1 0 0 0.6735 -1 0 0 0.6735 -1 0 0 0.3527 -1 0 0 0.3038 -1 0 0 0.0796 1 0 0 1.3 1 0 0 0.6509 1 0 0 0.3001 -1 0 0 0.2087 -1 0 0 0.3756 -1 0 0 0.3279 -1 0 0 0.1193 0 0 1 0'/> |
| 3986 |
<!-- ROUTE information for Jump_r_knee_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_knee_RotationInterpolator' key='0 0.2 0.25 0.3 0.64 0.76 0.88 1' keyValue='0 0 1 0 1 0 0 2.5 1 0 0 1.7 0 0 1 0 1 0 0 0.9507 1 0 0 0.5845 1 0 0 0.9054 0 0 1 0'/> |
| 3987 |
<!-- ROUTE information for Jump_r_hip_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_hip_RotationInterpolator' key='0 0.18 0.24 0.26 0.28 0.32 0.48 0.64 0.76 0.88 1' keyValue='0 0 1 0 -1 0 0 1.63 -1 0 0 1.7 -1 0 0 1.55 -1 0 0 0.8943 -1 0 0 0.3698 0 0 1 0 -1 0 0 0.4963 -1 0 0 0.3829 -1 0 0 0.5169 0 0 1 0'/> |
| 3988 |
<!-- ROUTE information for Jump_l_ankle_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_ankle_RotationInterpolator' key='0 0.28 0.32 0.36 0.4 0.44 0.48 0.64 0.76 0.84 0.88 0.92 0.96 1' keyValue='0 0 1 0 -1 0 0 0.625 -1 0 0 0.625 -1 0 0 0.3364 -1 0 0 0.2742 -1 0 0 0.0508 1 0 0 0.2833 1 0 0 0.6667 1 0 0 0.2833 -1 0 0 0.2108 -1 0 0 0.375 -1 0 0 0.3146 -1 0 0 0.1174 0 0 1 0'/> |
| 3989 |
<!-- ROUTE information for Jump_l_knee_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_knee_RotationInterpolator' key='0 0.28 0.32 0.48 0.64 0.76 0.88 1' keyValue='0 0 1 0 1 0 0 2.047 1 0 0 2.047 0 0 1 0 1 0 0 1.566 1 0 0 0.5913 1 0 0 0.9235 0 0 1 0'/> |
| 3990 |
<!-- ROUTE information for Jump_l_hip_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_hip_RotationInterpolator' key='0 0.28 0.32 0.36 0.4 0.44 0.48 0.64 0.76 0.88 1' keyValue='0 0 1 0 1 0 0 4.349 1 0 0 4.349 1 0 0 4.615 -1 0 0 0.9136 -1 0 0 0.3614 0 0 1 0 -1 0 0 0.7869 -1 0 0 0.3918 -1 0 0 0.5433 0 0 1 0'/> |
| 3991 |
<!-- ROUTE information for Jump_lower_body_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Jump_lower_body_RotationInterpolator' key='0 0.28 0.32 0.48 0.76 1' keyValue='0 0 1 0 1 0 0 0.1892 1 0 0 0.1892 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 3992 |
<!-- ROUTE information for Jump_r_wrist_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_wrist_RotationInterpolator' key='0 0.28 0.32 0.64 0.76 1' keyValue='0 0 1 0 -0.0585 0.9839 -0.1688 1.8596 -0.0585 0.9839 -0.1688 1.8596 -0.0022 0.998 -0.063 1.4607 0 1 0 0.4973 0 0 1 0'/> |
| 3993 |
<!-- ROUTE information for Jump_r_elbow_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_elbow_RotationInterpolator' key='0 0.28 0.32 0.64 0.76 1' keyValue='0 0 1 0 -1 0 0 0.0415 -1 0 0 0.0415 -1 0 0 0.5855 -1 0 0 0.5852 0 0 1 0'/> |
| 3994 |
<!-- ROUTE information for Jump_r_shoulder_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_shoulder_RotationInterpolator' key='0 0.28 0.32 0.64 0.76 0.88 1' keyValue='0 0 1 0 0.9992 0.0204 0.0356 4.688 0.9992 0.0204 0.0356 4.688 0.9989 -0.0462 0.0052 4.079 -0.8687 -0.2525 -0.4261 1.501 -0.941 -0.2893 -0.1754 0.4788 0 0 1 0'/> |
| 3995 |
<!-- ROUTE information for Jump_l_wrist_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_wrist_RotationInterpolator' key='0 0.48 0.52 0.64 0.76 0.88 1' keyValue='0 0 1 0 0.0673 0.9895 -0.1281 4.1557 0.0673 0.9895 -0.1281 4.1557 0.0036 0.9999 0.0136 4.5822 0 -1 0 0.6559 -0.0005 -1 0.0013 1.284 0 0 1 0'/> |
| 3996 |
<!-- ROUTE information for Jump_l_elbow_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_elbow_RotationInterpolator' key='0 0.28 0.32 0.58 0.72 1' keyValue='0 0 1 0 -1 0 0 1.13 -1 0 0 1.7 -1 0 0 1.7 -1 0 0 0.4 0 0 1 0'/> |
| 3997 |
<!-- ROUTE information for Jump_l_shoulder_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_shoulder_RotationInterpolator' key='0 0.28 0.32 0.64 0.76 0.88 1' keyValue='0 0 1 0 -0.9987 0.0255 0.045 1.57 -0.9987 0.0255 0.045 1.57 1 0.0004 0.0031 4.114 -0.8413 0.3238 0.4329 1.453 -0.877 0.4198 0.2337 0.6009 0 0 1 0'/> |
| 3998 |
<!-- ROUTE information for Jump_head_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_skullbase.rotation
]
-->
<OrientationInterpolator DEF='Jump_head_RotationInterpolator' key='0 0.28 0.32 0.48 0.76 1' keyValue='0 0 1 0 -1 0 0 0.5989 -1 0 0 0.5989 -1 0 0 0.3216 1 0 0 0.065 0 0 1 0'/> |
| 3999 |
<!-- ROUTE information for Jump_neck_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Jump_neck_RotationInterpolator' key='0 0.28 0.32 0.48 0.76 1' keyValue='0 0 1 0 -1 0 0 0.1942 -1 0 0 0.1942 0 0 1 0 1 0 0 0.2284 0 0 1 0'/> |
| 4000 |
<!-- ROUTE information for Jump_upper_body_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Jump_upper_body_RotationInterpolator' key='0 0.22 0.28 0.34 0.71 0.88 1' keyValue='0 0 1 0 1 0 0 1.05 1 0 0 1.051 -1 0 0 0.257 1 0 0 0.2171 1 0 0 0.3465 0 0 1 0'/> |
| 4001 |
<!-- ROUTE information for Jump_whole_body_RotationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Jump_whole_body_RotationInterpolator' key='0 0.28 0.32 0.48 0.64 0.76 1' keyValue='0 0 1 0 1 0 0 0.3273 1 0 0 0.3273 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4002 |
<!-- ROUTE information for Jump_whole_body_TranslationInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Jump_whole_body_TranslationInterpolator' key='0 0.04 0.07 0.11 0.15 0.19 0.22 0.25 0.27 0.31 0.33 0.35 0.38 0.53 0.544 0.76 0.8 0.84 0.88 0.92 0.96 1' keyValue='0 0 0 0 -0.0126 -0.0129 0 -0.0471 -0.0374 -0.0003 -0.1049 -0.0535 -0.0006 -0.1892 -0.0656 -0.0008 -0.286 -0.0628 -0.001 -0.3795 -0.0515 -0.0011 -0.4484 -0.0366 -0.0011 -0.4484 -0.0366 -0.0011 -0.25 -0.1499 -0.0009 -0.05 -0.0636 -0.0005 0.15 -0.0549 0.0005 0.55 0.0273 0.0002 1.385 0.0069 0.0002 1.395 0.0069 0 0.35 0.0215 0 -0.013 -0.0106 0 -0.0693 -0.0106 0.0001 -0.1037 -0.0051 0.0001 -0.072 -0.0076 0.0001 -0.0163 -0.0049 0 0 0'/> |
| 4003 |
<!-- ROUTE information for Jump_l_sternoclavicular_RollInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0.2 0 0 1 0.22 0 0 1 0.2 0 0 1 0 0 0 1 0'/> |
| 4004 |
<!-- ROUTE information for Jump_l_acromioclavicular_RollInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4005 |
<!-- ROUTE information for Jump_r_sternoclavicular_RollInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 -0.2 0 0 1 -0.22 0 0 1 -0.2 0 0 1 0 0 0 1 0'/> |
| 4006 |
<!-- ROUTE information for Jump_r_acromioclavicular_RollInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 -0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4007 |
<!-- ROUTE information for Jump_sacroiliac_YawInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Jump_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 1 0 0 0 -1 0 0.1 0 1 0 0 0 1 -1 0.24 0 -1 0 0.4 0 1 0 0'/> |
| 4008 |
<!-- ROUTE information for Jump_vl5_YawInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Jump_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 1 0 0 0 1 0 -0.1 0 1 0 0 0 1 0 0 1 0 0 0.6 0 1 0 0.1 0 1 0 0'/> |
| 4009 |
<!-- ROUTE information for Jump_vc6_YawInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Jump_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 1 0 0 0 1 0 0.8 0 1 0 0 0 1 0 0 -1 0 0 0.6 0 -1 0 0.8 0 1 0 0'/> |
| 4010 |
<!-- ROUTE information for Jump_l_thumb1_PitchInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Jump_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 1.1 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 4011 |
<!-- ROUTE information for Jump_r_thumb1_PitchInterpolator node:
[from JumpTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Jump_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 1.1 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 4012 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_ankle_RotationInterpolator' toField='set_fraction'/> |
| 4013 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_knee_RotationInterpolator' toField='set_fraction'/> |
| 4014 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_hip_RotationInterpolator' toField='set_fraction'/> |
| 4015 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_ankle_RotationInterpolator' toField='set_fraction'/> |
| 4016 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_knee_RotationInterpolator' toField='set_fraction'/> |
| 4017 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_hip_RotationInterpolator' toField='set_fraction'/> |
| 4018 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 4019 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_wrist_RotationInterpolator' toField='set_fraction'/> |
| 4020 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_elbow_RotationInterpolator' toField='set_fraction'/> |
| 4021 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 4022 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_wrist_RotationInterpolator' toField='set_fraction'/> |
| 4023 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_elbow_RotationInterpolator' toField='set_fraction'/> |
| 4024 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_shoulder_RotationInterpolator' toField='set_fraction'/> |
| 4025 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_head_RotationInterpolator' toField='set_fraction'/> |
| 4026 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_neck_RotationInterpolator' toField='set_fraction'/> |
| 4027 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 4028 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 4029 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 4030 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 4031 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 4032 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 4033 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 4034 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 4035 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 4036 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_vl5_YawInterpolator' toField='set_fraction'/> |
| 4037 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_vc6_YawInterpolator' toField='set_fraction'/> |
| 4038 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 4039 | < ROUTE fromNode='JumpTimer' fromField='fraction_changed' toNode='Jump_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 4040 | < ROUTE fromNode='Jump_r_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 4041 | < ROUTE fromNode='Jump_r_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 4042 | < ROUTE fromNode='Jump_r_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 4043 | < ROUTE fromNode='Jump_l_ankle_RotationInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 4044 | < ROUTE fromNode='Jump_l_knee_RotationInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 4045 | < ROUTE fromNode='Jump_l_hip_RotationInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 4046 | < ROUTE fromNode='Jump_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 4047 | < ROUTE fromNode='Jump_r_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 4048 | < ROUTE fromNode='Jump_r_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 4049 | < ROUTE fromNode='Jump_r_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 4050 | < ROUTE fromNode='Jump_l_wrist_RotationInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 4051 | < ROUTE fromNode='Jump_l_elbow_RotationInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 4052 | < ROUTE fromNode='Jump_l_shoulder_RotationInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 4053 | < ROUTE fromNode='Jump_head_RotationInterpolator' fromField='value_changed' toNode='hanim_skullbase' toField='rotation'/> |
| 4054 | < ROUTE fromNode='Jump_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 4055 | < ROUTE fromNode='Jump_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 4056 | < ROUTE fromNode='Jump_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 4057 | < ROUTE fromNode='Jump_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 4058 | < ROUTE fromNode='Jump_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 4059 | < ROUTE fromNode='Jump_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 4060 | < ROUTE fromNode='Jump_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 4061 | < ROUTE fromNode='Jump_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 4062 | < ROUTE fromNode='Jump_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 4063 | < ROUTE fromNode='Jump_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 4064 | < ROUTE fromNode='Jump_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 4065 | < ROUTE fromNode='Jump_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 4066 | < ROUTE fromNode='Jump_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 4067 | < ROUTE fromNode='Jump_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 4068 | < ROUTE fromNode='Jump_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 4069 | </Group> |
| 4070 | <Group DEF='KickAnimation'> |
| 4071 |
<!-- ROUTE information for KickTimer node:
[from Stand_Touch.touchTime to stopTime
]
[from Pitch_Touch.touchTime to stopTime
]
[from Yaw_Touch.touchTime to stopTime
]
[from Walk_Touch.touchTime to stopTime
]
[from Roll_Touch.touchTime to stopTime
]
[from Run_Touch.touchTime to stopTime
]
[from Jump_Touch.touchTime to stopTime
]
[from Kick_Touch.touchTime to startTime
]
[from Stop_Touch.touchTime to stopTime
]
[from fraction_changed to Kick_l_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_l_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_l_shoulder_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_l_ForeArm_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_l_wrist_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_l_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_sternoclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_r_acromioclavicular_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_r_shoulder_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_r_ForeArm_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_wrist_RollInterpolator.set_fraction
]
[from fraction_changed to Kick_r_thumb1_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_hip_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_knee_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_l_hip_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_l_knee_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_ankle_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_r_metatarsal_PitchInterpolator.set_fraction
]
[from fraction_changed to Kick_sacroiliac_YawInterpolator.set_fraction
]
[from fraction_changed to Kick_vl5_YawInterpolator.set_fraction
]
[from fraction_changed to Kick_vc6_YawInterpolator.set_fraction
]
[from fraction_changed to Kick_lower_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Kick_upper_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Kick_whole_body_RotationInterpolator.set_fraction
]
[from fraction_changed to Kick_whole_body_TranslationInterpolator.set_fraction
]
[from fraction_changed to Kick_neck_RotationInterpolator.set_fraction
]
-->
<TimeSensor DEF='KickTimer' cycleInterval='3.73' loop='true'/> |
| 4072 |
<!-- ROUTE information for Kick_l_sternoclavicular_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0.2 0 0 1 0.22 0 0 1 0.2 0 0 1 0 0 0 1 0'/> |
| 4073 |
<!-- ROUTE information for Kick_l_acromioclavicular_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4074 |
<!-- ROUTE information for Kick_l_shoulder_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_shoulder_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 1.76 -0.25 0 1 1.76 0 0 1 1.256 0 0 1 0.05 0 0 1 0'/> |
| 4075 |
<!-- ROUTE information for Kick_l_ForeArm_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_elbow.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_ForeArm_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 -0.55 -1 0.25 0 2.55 1 0 0 0 1 0 0 0 1 0 0 0'/> |
| 4076 |
<!-- ROUTE information for Kick_l_wrist_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_wrist.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_wrist_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 1 0 0.55 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4077 |
<!-- ROUTE information for Kick_l_thumb1_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 1.1 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 4078 |
<!-- ROUTE information for Kick_r_sternoclavicular_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_sternoclavicular.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_sternoclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 -0.2 0 0 1 -0.22 0 0 1 -0.2 0 0 1 0 0 0 1 0'/> |
| 4079 |
<!-- ROUTE information for Kick_r_acromioclavicular_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_acromioclavicular.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_acromioclavicular_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 -0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4080 |
<!-- ROUTE information for Kick_r_shoulder_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_shoulder.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_shoulder_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 -1.76 0.25 0 1 -1.76 0 0 1 -1.256 0 0 1 -0.05 0 0 1 0'/> |
| 4081 |
<!-- ROUTE information for Kick_r_ForeArm_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_elbow.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_ForeArm_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 -0.55 1 0.25 0 -2.55 1 0 0 0 1 0 0 0 1 0 0 0'/> |
| 4082 |
<!-- ROUTE information for Kick_r_wrist_RollInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_wrist.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_wrist_RollInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 1 0 -0.55 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4083 |
<!-- ROUTE information for Kick_r_thumb1_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_thumb1.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_thumb1_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 1.1 1 0 0 0.7 1 0 0 0.2 1 0 0 0'/> |
| 4084 |
<!-- ROUTE information for Kick_r_hip_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_hip.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_hip_PitchInterpolator' key='0 0.2 0.3 0.5 0.6 0.9 1' keyValue='1 0 0 0 1 0 0 0.9 -1 0 0 1.75 -1 0 0 2.25 -1 0 0 2 1 0 0 0 1 0 0 0'/> |
| 4085 |
<!-- ROUTE information for Kick_r_knee_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_knee.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_knee_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 1 0 0 1.95 1 0 0 1.75 -1 0 0 0.28 1 0 0 0 1 0 0 0'/> |
| 4086 |
<!-- ROUTE information for Kick_l_hip_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_hip.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_hip_PitchInterpolator' key='0 0.2 0.3 0.5 0.6 0.9 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4087 |
<!-- ROUTE information for Kick_l_knee_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_l_knee.rotation
]
-->
<OrientationInterpolator DEF='Kick_l_knee_PitchInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4088 |
<!-- ROUTE information for Kick_r_ankle_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_ankle.rotation
]
[from value_changed to hanim_l_ankle.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_ankle_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='0 0 1 0 -1 0 0 0.9 -1 0 0 0.95 1 0 0 0.75 -1 0 0 0.05 1 0 0 0'/> |
| 4089 |
<!-- ROUTE information for Kick_r_metatarsal_PitchInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_r_metatarsal.rotation
]
[from value_changed to hanim_l_metatarsal.rotation
]
-->
<OrientationInterpolator DEF='Kick_r_metatarsal_PitchInterpolator' key='0 0.2 0.4 0.6 0.7 1' keyValue='1 0 0 0 -1 0 0 0.5 -1 0 0 0.7 1 0 0 0.75 -1 0 0 0.2 1 0 0 0'/> |
| 4090 |
<!-- ROUTE information for Kick_sacroiliac_YawInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Kick_sacroiliac_YawInterpolator' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 1 0 0 0 -1 0 0.1 0 1 0 0 0 1 -1 0.24 0 -1 0 0.4 0 1 0 0'/> |
| 4091 |
<!-- ROUTE information for Kick_vl5_YawInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl5.rotation
]
-->
<OrientationInterpolator DEF='Kick_vl5_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4092 |
<!-- ROUTE information for Kick_vc6_YawInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc6.rotation
]
-->
<OrientationInterpolator DEF='Kick_vc6_YawInterpolator' key='0 0.2 0.4 0.5 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4093 |
<!-- ROUTE information for Kick_lower_body_RotationInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_sacroiliac.rotation
]
-->
<OrientationInterpolator DEF='Kick_lower_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4094 |
<!-- ROUTE information for Kick_upper_body_RotationInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vl1.rotation
]
-->
<OrientationInterpolator DEF='Kick_upper_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4095 |
<!-- ROUTE information for Kick_whole_body_RotationInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.rotation
]
-->
<OrientationInterpolator DEF='Kick_whole_body_RotationInterpolator' key='0 0.5 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 4096 |
<!-- ROUTE information for Kick_whole_body_TranslationInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_humanoid_root.translation
]
-->
<PositionInterpolator DEF='Kick_whole_body_TranslationInterpolator' key='0 0.5 1' keyValue='0 0 0 0 0 0 0 0 0'/> |
| 4097 |
<!-- ROUTE information for Kick_neck_RotationInterpolator node:
[from KickTimer.fraction_changed to set_fraction
]
[from value_changed to hanim_vc4.rotation
]
-->
<OrientationInterpolator DEF='Kick_neck_RotationInterpolator' key='0 0.25 0.55 1' keyValue='0 0 1 0 1 0 0 0.7 1 0 0 0.5 0 0 1 0'/> |
| 4098 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 4099 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 4100 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_shoulder_RollInterpolator' toField='set_fraction'/> |
| 4101 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_ForeArm_PitchInterpolator' toField='set_fraction'/> |
| 4102 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_wrist_RollInterpolator' toField='set_fraction'/> |
| 4103 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 4104 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_sternoclavicular_RollInterpolator' toField='set_fraction'/> |
| 4105 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_acromioclavicular_RollInterpolator' toField='set_fraction'/> |
| 4106 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_shoulder_RollInterpolator' toField='set_fraction'/> |
| 4107 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_ForeArm_PitchInterpolator' toField='set_fraction'/> |
| 4108 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_wrist_RollInterpolator' toField='set_fraction'/> |
| 4109 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_thumb1_PitchInterpolator' toField='set_fraction'/> |
| 4110 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_hip_PitchInterpolator' toField='set_fraction'/> |
| 4111 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_knee_PitchInterpolator' toField='set_fraction'/> |
| 4112 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_hip_PitchInterpolator' toField='set_fraction'/> |
| 4113 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_l_knee_PitchInterpolator' toField='set_fraction'/> |
| 4114 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_ankle_PitchInterpolator' toField='set_fraction'/> |
| 4115 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_r_metatarsal_PitchInterpolator' toField='set_fraction'/> |
| 4116 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_sacroiliac_YawInterpolator' toField='set_fraction'/> |
| 4117 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_vl5_YawInterpolator' toField='set_fraction'/> |
| 4118 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_vc6_YawInterpolator' toField='set_fraction'/> |
| 4119 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_lower_body_RotationInterpolator' toField='set_fraction'/> |
| 4120 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_upper_body_RotationInterpolator' toField='set_fraction'/> |
| 4121 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_whole_body_RotationInterpolator' toField='set_fraction'/> |
| 4122 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_whole_body_TranslationInterpolator' toField='set_fraction'/> |
| 4123 | < ROUTE fromNode='KickTimer' fromField='fraction_changed' toNode='Kick_neck_RotationInterpolator' toField='set_fraction'/> |
| 4124 | < ROUTE fromNode='Kick_l_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_sternoclavicular' toField='rotation'/> |
| 4125 | < ROUTE fromNode='Kick_l_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_l_acromioclavicular' toField='rotation'/> |
| 4126 | < ROUTE fromNode='Kick_l_shoulder_RollInterpolator' fromField='value_changed' toNode='hanim_l_shoulder' toField='rotation'/> |
| 4127 | < ROUTE fromNode='Kick_l_ForeArm_PitchInterpolator' fromField='value_changed' toNode='hanim_l_elbow' toField='rotation'/> |
| 4128 | < ROUTE fromNode='Kick_l_wrist_RollInterpolator' fromField='value_changed' toNode='hanim_l_wrist' toField='rotation'/> |
| 4129 | < ROUTE fromNode='Kick_l_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_l_thumb1' toField='rotation'/> |
| 4130 | < ROUTE fromNode='Kick_r_sternoclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_sternoclavicular' toField='rotation'/> |
| 4131 | < ROUTE fromNode='Kick_r_acromioclavicular_RollInterpolator' fromField='value_changed' toNode='hanim_r_acromioclavicular' toField='rotation'/> |
| 4132 | < ROUTE fromNode='Kick_r_shoulder_RollInterpolator' fromField='value_changed' toNode='hanim_r_shoulder' toField='rotation'/> |
| 4133 | < ROUTE fromNode='Kick_r_ForeArm_PitchInterpolator' fromField='value_changed' toNode='hanim_r_elbow' toField='rotation'/> |
| 4134 | < ROUTE fromNode='Kick_r_wrist_RollInterpolator' fromField='value_changed' toNode='hanim_r_wrist' toField='rotation'/> |
| 4135 | < ROUTE fromNode='Kick_r_thumb1_PitchInterpolator' fromField='value_changed' toNode='hanim_r_thumb1' toField='rotation'/> |
| 4136 | < ROUTE fromNode='Kick_r_hip_PitchInterpolator' fromField='value_changed' toNode='hanim_r_hip' toField='rotation'/> |
| 4137 | < ROUTE fromNode='Kick_r_knee_PitchInterpolator' fromField='value_changed' toNode='hanim_r_knee' toField='rotation'/> |
| 4138 | < ROUTE fromNode='Kick_r_ankle_PitchInterpolator' fromField='value_changed' toNode='hanim_r_ankle' toField='rotation'/> |
| 4139 | < ROUTE fromNode='Kick_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_r_metatarsal' toField='rotation'/> |
| 4140 | < ROUTE fromNode='Kick_l_hip_PitchInterpolator' fromField='value_changed' toNode='hanim_l_hip' toField='rotation'/> |
| 4141 | < ROUTE fromNode='Kick_l_knee_PitchInterpolator' fromField='value_changed' toNode='hanim_l_knee' toField='rotation'/> |
| 4142 | < ROUTE fromNode='Kick_r_ankle_PitchInterpolator' fromField='value_changed' toNode='hanim_l_ankle' toField='rotation'/> |
| 4143 | < ROUTE fromNode='Kick_r_metatarsal_PitchInterpolator' fromField='value_changed' toNode='hanim_l_metatarsal' toField='rotation'/> |
| 4144 | < ROUTE fromNode='Kick_sacroiliac_YawInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 4145 | < ROUTE fromNode='Kick_vl5_YawInterpolator' fromField='value_changed' toNode='hanim_vl5' toField='rotation'/> |
| 4146 | < ROUTE fromNode='Kick_vc6_YawInterpolator' fromField='value_changed' toNode='hanim_vc6' toField='rotation'/> |
| 4147 | < ROUTE fromNode='Kick_upper_body_RotationInterpolator' fromField='value_changed' toNode='hanim_vl1' toField='rotation'/> |
| 4148 | < ROUTE fromNode='Kick_lower_body_RotationInterpolator' fromField='value_changed' toNode='hanim_sacroiliac' toField='rotation'/> |
| 4149 | < ROUTE fromNode='Kick_whole_body_RotationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='rotation'/> |
| 4150 | < ROUTE fromNode='Kick_whole_body_TranslationInterpolator' fromField='value_changed' toNode='hanim_humanoid_root' toField='translation'/> |
| 4151 | < ROUTE fromNode='Kick_neck_RotationInterpolator' fromField='value_changed' toNode='hanim_vc4' toField='rotation'/> |
| 4152 | </Group> |
| 4153 | <Group DEF='UserInterface'> |
| 4154 | <!-- Authoring hint: these axes are aligned within local coordinate system --> |
| 4155 | <Transform DEF='CoordinateAxesAdjustedScale' scale='0.175 0.175 0.175'> |
| 4156 |
<Inline DEF='CoordinateAxes'
url=' "../../X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.x3d" "https://www.web3d.org/x3d/content/examples/X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.x3d" "../../X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.wrl" "https://www.web3d.org/x3d/content/examples/X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.wrl" '/>
|
| 4157 | </Transform> |
| 4158 | <Transform DEF='cordsys' scale='0.175 0.175 0.175'> |
| 4159 | <!-- <Inline bboxCenter='0.05143541 0.07883984 0.04731131' bboxSize='2.202872 2.25768 2.194624' url='"JointCoordinateAxes.x3dv"'/> --> |
| 4160 | </Transform> |
| 4161 |
<!-- ROUTE information for HudProximitySensor node:
[from position_changed to HudXform.translation
]
[from orientation_changed to HudXform.rotation
]
-->
<ProximitySensor DEF='HudProximitySensor' center='0 20 0' size='500 100 500'/> |
| 4162 | <Transform DEF='Stage' scale='1 0.0125 1' translation='0 -0.0125 0'> |
| 4163 | <Shape> |
| 4164 | <Appearance> |
| 4165 | <Material transparency='0.6'/> |
| 4166 | </Appearance> |
| 4167 | <Box/> |
| 4168 | </Shape> |
| 4169 | <Transform DEF='Circle0' scale='1.175 1 1.175'> |
| 4170 | <Shape> |
| 4171 | <Appearance> |
| 4172 | <Material diffuseColor='0.9 0 0.7' emissiveColor='0.425 0.484 1'/> |
| 4173 | </Appearance> |
| 4174 | |
| 4175 | <Coordinate point='1 0 0 0.995 0 -0.105 0.979 0 -0.208 0.951 0 -0.309 0.914 0 -0.407 0.866 0 -0.5 0.809 0 -0.588 0.743 0 -0.669 0.669 0 -0.743 0.588 0 -0.809 0.5 0 -0.866 0.407 0 -0.914 0.309 0 -0.951 0.208 0 -0.978 0.105 0 -0.995 0 0 -1 -0.105 0 -0.9945 -0.208 0 -0.978 -0.309 0 -0.951 -0.407 0 -0.914 -0.5 0 -0.866 -0.588 0 -0.809 -0.669 0 -0.743 -0.743 0 -0.669 -0.809 0 -0.588 -0.866 0 -0.5 -0.914 0 -0.407 -0.951 0 -0.309 -0.978 0 -0.208 -0.995 0 -0.105 -1 0 0 -0.995 0 0.105 -0.978 0 0.208 -0.951 0 0.309 -0.914 0 0.407 -0.866 0 0.5 -0.809 0 0.588 -0.743 0 0.669 -0.669 0 0.743 -0.588 0 0.809 -0.5 0 0.866 -0.407 0 0.914 -0.309 0 0.951 -0.208 0 0.978 -0.105 0 0.995 0 0 1 0.105 0 0.995 0.208 0 0.978 0.309 0 0.951 0.407 0 0.914 0.5 0 0.866 0.588 0 0.809 0.669 0 0.743 0.743 0 0.669 0.809 0 0.588 0.866 0 0.5 0.914 0 0.407 0.951 0 0.309 0.978 0 0.208 0.995 0 0.104 1 0 0'/> |
| 4176 | </IndexedLineSet> |
| 4177 | </Shape> |
| 4178 | </Transform> |
| 4179 | <Transform DEF='Circle1' scale='0.5 1 0.5'> |
| 4180 | <Shape> |
| 4181 | <Appearance> |
| 4182 | <Material diffuseColor='0.9 0 0.7' emissiveColor='0.425 0.484 1'/> |
| 4183 | </Appearance> |
| 4184 | <IndexedLineSet USE='Orbit1'/> |
| 4185 | </Shape> |
| 4186 | </Transform> |
| 4187 | <Transform DEF='Circle2' scale='0.25 1 0.25'> |
| 4188 | <Shape> |
| 4189 | <Appearance> |
| 4190 | <Material diffuseColor='0.9 0 0.7' emissiveColor='0.425 0.484 1'/> |
| 4191 | </Appearance> |
| 4192 | <IndexedLineSet USE='Orbit1'/> |
| 4193 | </Shape> |
| 4194 | </Transform> |
| 4195 | </Transform> |
| 4196 |
<!-- ROUTE information for HudXform node:
[from HudProximitySensor.position_changed to translation
]
[from HudProximitySensor.orientation_changed to rotation
]
-->
<Transform DEF='HudXform' rotation='-0.1 0.9943 0.0384 0.7131' translation='1.7054 1.0421 1.9897'> |
| 4197 | <Transform scale='0.035 0.035 0.035' translation='-0.42 -0.2 -0.75'> |
| 4198 | <Transform DEF='StandTransform' translation='0 -1 0'> |
| 4199 |
<!-- ROUTE information for Stand_Touch node:
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to StandTimer.startTime
]
-->
<TouchSensor DEF='Stand_Touch' description='touch to select'/> |
| 4200 | <Shape DEF='StandTextShape'> |
| 4201 | <Appearance> |
| 4202 | |
| 4203 | </Appearance> |
| 4204 | <Text string='"Stand"'/> |
| 4205 | </Shape> |
| 4206 | <Shape DEF='Stand_Back'> |
| 4207 | <Appearance> |
| 4208 | |
| 4209 | </Appearance> |
| 4210 | |
| 4211 | <Coordinate point='-0.2 -1.2 -0.01 2.5 -1.2 -0.01 2.5 0.75 -0.01 -0.2 0.75 -0.01'/> |
| 4212 | </IndexedFaceSet> |
| 4213 | </Shape> |
| 4214 | </Transform> |
| 4215 | <Transform DEF='PitchTransform' translation='3 -1 0'> |
| 4216 |
<!-- ROUTE information for Pitch_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to PitchTimer.startTime
]
-->
<TouchSensor DEF='Pitch_Touch' description='touch to select'/> |
| 4217 | <Shape DEF='PitchTextShape'> |
| 4218 | <Appearance> |
| 4219 | <Material USE='text_color'/> |
| 4220 | </Appearance> |
| 4221 | <Text string='"Pitch"'/> |
| 4222 | </Shape> |
| 4223 | <Shape DEF='Pitch_Back'> |
| 4224 | <Appearance> |
| 4225 | <Material USE='Clear'/> |
| 4226 | </Appearance> |
| 4227 | <IndexedFaceSet USE='Backing'/> |
| 4228 | </Shape> |
| 4229 | </Transform> |
| 4230 | <Transform DEF='YawTransform' translation='6 -1 0'> |
| 4231 |
<!-- ROUTE information for Yaw_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to YawTimer.startTime
]
-->
<TouchSensor DEF='Yaw_Touch' description='touch to select'/> |
| 4232 | <Shape DEF='YawText'> |
| 4233 | <Appearance> |
| 4234 | <Material USE='text_color'/> |
| 4235 | </Appearance> |
| 4236 | <Text string='"Yaw"'/> |
| 4237 | </Shape> |
| 4238 | <Shape DEF='Yaw_Back'> |
| 4239 | <Appearance> |
| 4240 | <Material USE='Clear'/> |
| 4241 | </Appearance> |
| 4242 | <IndexedFaceSet USE='Backing'/> |
| 4243 | </Shape> |
| 4244 | </Transform> |
| 4245 | <Transform DEF='RollTransform' translation='9 -1 0'> |
| 4246 |
<!-- ROUTE information for Roll_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to RollTimer.startTime
]
-->
<TouchSensor DEF='Roll_Touch' description='touch to select'/> |
| 4247 | <Shape DEF='_RollInterpolator'> |
| 4248 | <Appearance> |
| 4249 | <Material USE='text_color'/> |
| 4250 | </Appearance> |
| 4251 | <Text string='"Roll"'/> |
| 4252 | </Shape> |
| 4253 | <Shape DEF='Roll_Back'> |
| 4254 | <Appearance> |
| 4255 | <Material USE='Clear'/> |
| 4256 | </Appearance> |
| 4257 | <IndexedFaceSet USE='Backing'/> |
| 4258 | </Shape> |
| 4259 | </Transform> |
| 4260 | <Transform DEF='WalkTransform' translation='12 -1 0'> |
| 4261 |
<!-- ROUTE information for Walk_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to WalkTimer.startTime
]
-->
<TouchSensor DEF='Walk_Touch' description='touch to select'/> |
| 4262 | <Shape DEF='WalkText'> |
| 4263 | <Appearance> |
| 4264 | <Material USE='text_color'/> |
| 4265 | </Appearance> |
| 4266 | <Text string='"Walk"'/> |
| 4267 | </Shape> |
| 4268 | <Shape DEF='Walk_Back'> |
| 4269 | <Appearance> |
| 4270 | <Material USE='Clear'/> |
| 4271 | </Appearance> |
| 4272 | <IndexedFaceSet USE='Backing'/> |
| 4273 | </Shape> |
| 4274 | </Transform> |
| 4275 | <Transform DEF='RunTransform' translation='15 -1 0'> |
| 4276 |
<!-- ROUTE information for Run_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to RunTimer.startTime
]
-->
<TouchSensor DEF='Run_Touch' description='touch to select'/> |
| 4277 | <Shape DEF='RunText'> |
| 4278 | <Appearance> |
| 4279 | <Material USE='text_color'/> |
| 4280 | </Appearance> |
| 4281 | <Text string='"Run"'/> |
| 4282 | </Shape> |
| 4283 | <Shape DEF='Run_Back'> |
| 4284 | <Appearance> |
| 4285 | <Material USE='Clear'/> |
| 4286 | </Appearance> |
| 4287 | <IndexedFaceSet USE='Backing'/> |
| 4288 | </Shape> |
| 4289 | </Transform> |
| 4290 | <Transform DEF='JumpTransform' translation='18 -1 0'> |
| 4291 |
<!-- ROUTE information for Jump_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to JumpTimer.startTime
]
-->
<TouchSensor DEF='Jump_Touch' description='touch to select'/> |
| 4292 | <Shape DEF='Jump'> |
| 4293 | <Appearance> |
| 4294 | <Material USE='text_color'/> |
| 4295 | </Appearance> |
| 4296 | <Text string='"Jump"'/> |
| 4297 | </Shape> |
| 4298 | <Shape DEF='Jump_Back'> |
| 4299 | <Appearance> |
| 4300 | <Material USE='Clear'/> |
| 4301 | </Appearance> |
| 4302 | <IndexedFaceSet USE='Backing'/> |
| 4303 | </Shape> |
| 4304 | </Transform> |
| 4305 | <Transform DEF='KickTransform' translation='21 -1 0'> |
| 4306 |
<!-- ROUTE information for Kick_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to StopTimer.stopTime
]
[from touchTime to KickTimer.startTime
]
-->
<TouchSensor DEF='Kick_Touch' description='touch to select'/> |
| 4307 | <Shape DEF='KickText'> |
| 4308 | <Appearance> |
| 4309 | <Material USE='text_color'/> |
| 4310 | </Appearance> |
| 4311 | <Text string='"Kick"'/> |
| 4312 | </Shape> |
| 4313 | <Shape DEF='Kick_Back'> |
| 4314 | <Appearance> |
| 4315 | <Material USE='Clear'/> |
| 4316 | </Appearance> |
| 4317 | <IndexedFaceSet USE='Backing'/> |
| 4318 | </Shape> |
| 4319 | </Transform> |
| 4320 | <Transform DEF='Stop_Text' translation='0 1.4 0'> |
| 4321 |
<!-- ROUTE information for Stop_Touch node:
[from touchTime to StandTimer.stopTime
]
[from touchTime to PitchTimer.stopTime
]
[from touchTime to YawTimer.stopTime
]
[from touchTime to RollTimer.stopTime
]
[from touchTime to WalkTimer.stopTime
]
[from touchTime to RunTimer.stopTime
]
[from touchTime to JumpTimer.stopTime
]
[from touchTime to KickTimer.stopTime
]
[from touchTime to StopTimer.startTime
]
-->
<TouchSensor DEF='Stop_Touch' description='touch to select'/> |
| 4322 | <Shape DEF='StopText'> |
| 4323 | <Appearance> |
| 4324 | <Material USE='text_color'/> |
| 4325 | </Appearance> |
| 4326 | <Text string='"Stop" "Default Pose"'/> |
| 4327 | </Shape> |
| 4328 | <Shape DEF='Stop_Back'> |
| 4329 | <Appearance> |
| 4330 | <Material USE='Clear'/> |
| 4331 | </Appearance> |
| 4332 | <IndexedFaceSet USE='Backing'/> |
| 4333 | </Shape> |
| 4334 | </Transform> |
| 4335 | </Transform> |
| 4336 | </Transform> |
| 4337 | < ROUTE fromNode='HudProximitySensor' fromField='position_changed' toNode='HudXform' toField='translation'/> |
| 4338 | < ROUTE fromNode='HudProximitySensor' fromField='orientation_changed' toNode='HudXform' toField='rotation'/> |
| 4339 | </Group> |
| 4340 | <Group DEF='BehaviorSynchronization'> |
| 4341 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4342 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4343 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4344 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4345 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4346 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4347 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4348 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4349 | < ROUTE fromNode='Stand_Touch' fromField='touchTime' toNode='StandTimer' toField='startTime'/> |
| 4350 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4351 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4352 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4353 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4354 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4355 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4356 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4357 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4358 | < ROUTE fromNode='Pitch_Touch' fromField='touchTime' toNode='PitchTimer' toField='startTime'/> |
| 4359 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4360 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4361 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4362 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4363 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4364 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4365 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4366 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4367 | < ROUTE fromNode='Yaw_Touch' fromField='touchTime' toNode='YawTimer' toField='startTime'/> |
| 4368 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4369 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4370 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4371 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4372 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4373 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4374 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4375 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4376 | < ROUTE fromNode='Walk_Touch' fromField='touchTime' toNode='WalkTimer' toField='startTime'/> |
| 4377 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4378 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4379 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4380 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4381 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4382 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4383 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4384 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4385 | < ROUTE fromNode='Roll_Touch' fromField='touchTime' toNode='RollTimer' toField='startTime'/> |
| 4386 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4387 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4388 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4389 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4390 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4391 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4392 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4393 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4394 | < ROUTE fromNode='Run_Touch' fromField='touchTime' toNode='RunTimer' toField='startTime'/> |
| 4395 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4396 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4397 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4398 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4399 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4400 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4401 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4402 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4403 | < ROUTE fromNode='Jump_Touch' fromField='touchTime' toNode='JumpTimer' toField='startTime'/> |
| 4404 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4405 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4406 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4407 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4408 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4409 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4410 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4411 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='StopTimer' toField='stopTime'/> |
| 4412 | < ROUTE fromNode='Kick_Touch' fromField='touchTime' toNode='KickTimer' toField='startTime'/> |
| 4413 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='StandTimer' toField='stopTime'/> |
| 4414 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='PitchTimer' toField='stopTime'/> |
| 4415 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='YawTimer' toField='stopTime'/> |
| 4416 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='RollTimer' toField='stopTime'/> |
| 4417 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='WalkTimer' toField='stopTime'/> |
| 4418 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='RunTimer' toField='stopTime'/> |
| 4419 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='JumpTimer' toField='stopTime'/> |
| 4420 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='KickTimer' toField='stopTime'/> |
| 4421 | < ROUTE fromNode='Stop_Touch' fromField='touchTime' toNode='StopTimer' toField='startTime'/> |
| 4422 | </Group> |
| 4423 | </Scene> |
| 4424 | </X3D> |
HAnimHumanoid model visualization report: humanoid HAnimHumanoid Report
Event Graph ROUTE Table shows event connections.
-->
<!--
![]() DEF nodes index:
_RollInterpolator,
Backing,
BehaviorSynchronization,
Circle0,
Circle1,
Circle2,
Clear,
CoordinateAxes,
CoordinateAxesAdjustedScale,
cordsys,
DiamondIFS,
hanim_back_view,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_feet_front_close_view,
hanim_front_close_view,
hanim_front_view,
hanim_head_front_close_view,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
HudProximitySensor,
HudXform,
Jump,
Jump_Back,
Jump_head_RotationInterpolator,
Jump_l_acromioclavicular_RollInterpolator,
Jump_l_ankle_RotationInterpolator,
Jump_l_elbow_RotationInterpolator,
Jump_l_hip_RotationInterpolator,
Jump_l_knee_RotationInterpolator,
Jump_l_shoulder_RotationInterpolator,
Jump_l_sternoclavicular_RollInterpolator,
Jump_l_thumb1_PitchInterpolator,
Jump_l_wrist_RotationInterpolator,
Jump_lower_body_RotationInterpolator,
Jump_neck_RotationInterpolator,
Jump_r_acromioclavicular_RollInterpolator,
Jump_r_ankle_RotationInterpolator,
Jump_r_elbow_RotationInterpolator,
Jump_r_hip_RotationInterpolator,
Jump_r_knee_RotationInterpolator,
Jump_r_metatarsal_PitchInterpolator,
Jump_r_shoulder_RotationInterpolator,
Jump_r_sternoclavicular_RollInterpolator,
Jump_r_thumb1_PitchInterpolator,
Jump_r_wrist_RotationInterpolator,
Jump_sacroiliac_YawInterpolator,
Jump_Touch,
Jump_upper_body_RotationInterpolator,
Jump_vc6_YawInterpolator,
Jump_vl5_YawInterpolator,
Jump_whole_body_RotationInterpolator,
Jump_whole_body_TranslationInterpolator,
JumpAnimation,
JumpTimer,
JumpTransform,
Kick_Back,
Kick_l_acromioclavicular_RollInterpolator,
Kick_l_ForeArm_PitchInterpolator,
Kick_l_hip_PitchInterpolator,
Kick_l_knee_PitchInterpolator,
Kick_l_shoulder_RollInterpolator,
Kick_l_sternoclavicular_RollInterpolator,
Kick_l_thumb1_PitchInterpolator,
Kick_l_wrist_RollInterpolator,
Kick_lower_body_RotationInterpolator,
Kick_neck_RotationInterpolator,
Kick_r_acromioclavicular_RollInterpolator,
Kick_r_ankle_PitchInterpolator,
Kick_r_ForeArm_PitchInterpolator,
Kick_r_hip_PitchInterpolator,
Kick_r_knee_PitchInterpolator,
Kick_r_metatarsal_PitchInterpolator,
Kick_r_shoulder_RollInterpolator,
Kick_r_sternoclavicular_RollInterpolator,
Kick_r_thumb1_PitchInterpolator,
Kick_r_wrist_RollInterpolator,
Kick_sacroiliac_YawInterpolator,
Kick_Touch,
Kick_upper_body_RotationInterpolator,
Kick_vc6_YawInterpolator,
Kick_vl5_YawInterpolator,
Kick_whole_body_RotationInterpolator,
Kick_whole_body_TranslationInterpolator,
KickAnimation,
KickText,
KickTimer,
KickTransform,
Orbit1,
Original_WorldInfo,
Pitch_Back,
Pitch_l_acromioclavicular_RollInterpolator,
Pitch_l_sternoclavicular_RollInterpolator,
Pitch_l_thumb1_PitchInterpolator,
Pitch_r_acromioclavicular_RollInterpolator,
Pitch_r_metatarsal_PitchInterpolator,
Pitch_r_sternoclavicular_RollInterpolator,
Pitch_r_thumb1_PitchInterpolator,
Pitch_sacroiliac_YawInterpolator,
Pitch_Touch,
Pitch_vc6_YawInterpolator,
Pitch_vl5_YawInterpolator,
Pitches_head_RotationInterpolator,
Pitches_l_ankle_RotationInterpolator,
Pitches_l_elbow_RotationInterpolator,
Pitches_l_hip_RotationInterpolator,
Pitches_l_knee_RotationInterpolator,
Pitches_l_shoulder_RotationInterpolator,
Pitches_l_wrist_RotationInterpolator,
Pitches_lower_body_RotationInterpolator,
Pitches_neck_RotationInterpolator,
Pitches_r_ankle_RotationInterpolator,
Pitches_r_elbow_RotationInterpolator,
Pitches_r_hip_RotationInterpolator,
Pitches_r_knee_RotationInterpolator,
Pitches_r_shoulder_RotationInterpolator,
Pitches_r_wrist_RotationInterpolator,
Pitches_upper_body_RotationInterpolator,
Pitches_whole_body_RotationInterpolator,
Pitches_whole_body_TranslationInterpolator,
PitchesAnimation,
PitchTextShape,
PitchTimer,
PitchTransform,
Roll_Back,
Roll_l_acromioclavicular_RollInterpolator,
Roll_l_sternoclavicular_RollInterpolator,
Roll_l_thumb1_PitchInterpolator,
Roll_r_acromioclavicular_RollInterpolator,
Roll_r_metatarsal_PitchInterpolator,
Roll_r_sternoclavicular_RollInterpolator,
Roll_r_thumb1_PitchInterpolator,
Roll_sacroiliac_YawInterpolator,
Roll_Touch,
Roll_vc6_YawInterpolator,
Roll_vl5_YawInterpolator,
Rolls_head_RotationInterpolator,
Rolls_l_ankle_RotationInterpolator,
Rolls_l_elbow_RotationInterpolator,
Rolls_l_hip_RotationInterpolator,
Rolls_l_knee_RotationInterpolator,
Rolls_l_shoulder_RotationInterpolator,
Rolls_l_wrist_RotationInterpolator,
Rolls_lower_body_RotationInterpolator,
Rolls_neck_RotationInterpolator,
Rolls_r_ankle_RotationInterpolator,
Rolls_r_elbow_RotationInterpolator,
Rolls_r_hip_RotationInterpolator,
Rolls_r_knee_RotationInterpolator,
Rolls_r_shoulder_RotationInterpolator,
Rolls_r_wrist_RotationInterpolator,
Rolls_upper_body_RotationInterpolator,
Rolls_whole_body_RotationInterpolator,
Rolls_whole_body_TranslationInterpolator,
RollsAnimation,
RollTimer,
RollTransform,
Run_Back,
Run_head_RotationInterpolator_Run,
Run_l_acromioclavicular_RollInterpolator,
Run_l_ankle_RotationInterpolator_Run,
Run_l_elbow_RotationInterpolator_Run,
Run_l_hip_RotationInterpolator_Run,
Run_l_knee_RotationInterpolator_Run,
Run_l_shoulder_RotationInterpolator_Run,
Run_l_sternoclavicular_RollInterpolator,
Run_l_thumb1_PitchInterpolator,
Run_l_wrist_RotationInterpolator_Run,
Run_lower_body_RotationInterpolator_Run,
Run_neck_RotationInterpolator_Run,
Run_r_acromioclavicular_RollInterpolator,
Run_r_ankle_RotationInterpolator_Run,
Run_r_elbow_RotationInterpolator_Run,
Run_r_hip_RotationInterpolator_Run,
Run_r_knee_RotationInterpolator_Run,
Run_r_metatarsal_PitchInterpolator,
Run_r_shoulder_RotationInterpolator_Run,
Run_r_sternoclavicular_RollInterpolator,
Run_r_thumb1_PitchInterpolator,
Run_r_wrist_RotationInterpolator_Run,
Run_sacroiliac_YawInterpolator,
Run_Touch,
Run_upper_body_RotationInterpolator_Run,
Run_vc6_YawInterpolator,
Run_vl5_YawInterpolator,
Run_whole_body_RotationInterpolator_Run,
Run_whole_body_TranslationInterpolator_Run,
RunAnimation,
RunText,
RunTimer,
RunTransform,
SiteViewpointDiamondIFS,
Stage,
Stand_Back,
Stand_head_RotationInterpolator,
Stand_l_acromioclavicular_RollInterpolator,
Stand_l_ankle_RotationInterpolator,
Stand_l_elbow_RotationInterpolator,
Stand_l_eyeball_RotationInterpolator,
Stand_l_hip_RotationInterpolator,
Stand_l_knee_RotationInterpolator,
Stand_l_shoulder_RotationInterpolator,
Stand_l_sternoclavicular_RollInterpolator,
Stand_l_thumb1_PitchInterpolator,
Stand_l_wrist_RotationInterpolator,
Stand_lower_body_RotationInterpolator,
Stand_neck_RotationInterpolator,
Stand_r_acromioclavicular_RollInterpolator,
Stand_r_ankle_RotationInterpolator,
Stand_r_elbow_RotationInterpolator,
Stand_r_eyeball_RotationInterpolator,
Stand_r_hip_RotationInterpolator,
Stand_r_index1_RollInterpolator,
Stand_r_index2_RollInterpolator,
Stand_r_index3_RollInterpolator,
Stand_r_knee_RotationInterpolator,
Stand_r_metatarsal_PitchInterpolator,
Stand_r_shoulder_RotationInterpolator,
Stand_r_sternoclavicular_RollInterpolator,
Stand_r_thumb1_PitchInterpolator,
Stand_r_wrist_RotationInterpolator,
Stand_sacroiliac_YawInterpolator,
Stand_Touch,
Stand_upper_body_RotationInterpolator,
Stand_vc6_YawInterpolator,
Stand_vl5_YawInterpolator,
Stand_whole_body_RotationInterpolator,
Stand_whole_body_TranslationInterpolator,
StandAnimation,
StandTextShape,
StandTimer,
StandTransform,
Stop_Back,
Stop_HumanoidRoot_RotationInterpolator,
Stop_HumanoidRoot_TranslationInterpolator,
Stop_l_acromioclavicular_RotationInterpolator,
Stop_l_ankle_RotationInterpolator,
Stop_l_elbow_RotationInterpolator,
Stop_l_eyeball_joint_RotationInterpolator,
Stop_l_hip_RotationInterpolator,
Stop_l_index0_RotationInterpolator,
Stop_l_index1_RotationInterpolator,
Stop_l_index2_RotationInterpolator,
Stop_l_index3_RotationInterpolator,
Stop_l_knee_RotationInterpolator,
Stop_l_metatarsal_RotationInterpolator,
Stop_l_middle0_RotationInterpolator,
Stop_l_middle1_RotationInterpolator,
Stop_l_middle2_RotationInterpolator,
Stop_l_middle3_RotationInterpolator,
Stop_l_midtarsal_RotationInterpolator,
Stop_l_pinky0_RotationInterpolator,
Stop_l_pinky1_RotationInterpolator,
Stop_l_pinky2_RotationInterpolator,
Stop_l_pinky3_RotationInterpolator,
Stop_l_ring0_RotationInterpolator,
Stop_l_ring1_RotationInterpolator,
Stop_l_ring2_RotationInterpolator,
Stop_l_ring3_RotationInterpolator,
Stop_l_shoulder_RotationInterpolator,
Stop_l_sternoclavicular_RotationInterpolator,
Stop_l_subtalar_RotationInterpolator,
Stop_l_thumb1_RotationInterpolator,
Stop_l_thumb2_RotationInterpolator,
Stop_l_thumb3_RotationInterpolator,
Stop_l_wrist_RotationInterpolator,
Stop_r_acromioclavicular_RotationInterpolator,
Stop_r_ankle_RotationInterpolator,
Stop_r_elbow_RotationInterpolator,
Stop_r_eyeball_joint_RotationInterpolator,
Stop_r_hip_RotationInterpolator,
Stop_r_index0_RotationInterpolator,
Stop_r_index1_RotationInterpolator,
Stop_r_index2_RotationInterpolator,
Stop_r_index3_RotationInterpolator,
Stop_r_knee_RotationInterpolator,
Stop_r_metatarsal_RotationInterpolator,
Stop_r_middle0_RotationInterpolator,
Stop_r_middle1_RotationInterpolator,
Stop_r_middle2_RotationInterpolator,
Stop_r_middle3_RotationInterpolator,
Stop_r_midtarsal_RotationInterpolator,
Stop_r_pinky0_RotationInterpolator,
Stop_r_pinky1_RotationInterpolator,
Stop_r_pinky2_RotationInterpolator,
Stop_r_pinky3_RotationInterpolator,
Stop_r_ring0_RotationInterpolator,
Stop_r_ring1_RotationInterpolator,
Stop_r_ring2_RotationInterpolator,
Stop_r_ring3_RotationInterpolator,
Stop_r_shoulder_RotationInterpolator,
Stop_r_sternoclavicular_RotationInterpolator,
Stop_r_subtalar_RotationInterpolator,
Stop_r_thumb1_RotationInterpolator,
Stop_r_thumb2_RotationInterpolator,
Stop_r_thumb3_RotationInterpolator,
Stop_r_wrist_RotationInterpolator,
Stop_sacroiliac_RotationInterpolator,
Stop_skullbase_RotationInterpolator,
Stop_Text,
Stop_Touch,
Stop_vc1_RotationInterpolator,
Stop_vc2_RotationInterpolator,
Stop_vc3_RotationInterpolator,
Stop_vc4_RotationInterpolator,
Stop_vc5_RotationInterpolator,
Stop_vc6_RotationInterpolator,
Stop_vc7_RotationInterpolator,
Stop_vl1_RotationInterpolator,
Stop_vl2_RotationInterpolator,
Stop_vl3_RotationInterpolator,
Stop_vl4_RotationInterpolator,
Stop_vl5_RotationInterpolator,
Stop_vt1_RotationInterpolator,
Stop_vt10_RotationInterpolator,
Stop_vt11_RotationInterpolator,
Stop_vt12_RotationInterpolator,
Stop_vt2_RotationInterpolator,
Stop_vt3_RotationInterpolator,
Stop_vt4_RotationInterpolator,
Stop_vt5_RotationInterpolator,
Stop_vt6_RotationInterpolator,
Stop_vt7_RotationInterpolator,
Stop_vt8_RotationInterpolator,
Stop_vt9_RotationInterpolator,
StopAnimation,
StopText,
StopTimer,
text_color,
UserInterface,
Walk_Back,
Walk_head_RotationInterpolator,
Walk_l_acromioclavicular_RollInterpolator,
Walk_l_ankle_RotationInterpolator,
Walk_l_elbow_RotationInterpolator,
Walk_l_hip_RotationInterpolator,
Walk_l_knee_RotationInterpolator,
Walk_l_shoulder_RotationInterpolator,
Walk_l_sternoclavicular_RollInterpolator,
Walk_l_thumb1_PitchInterpolator,
Walk_l_wrist_RotationInterpolator,
Walk_lower_body_RotationInterpolator,
Walk_neck_RotationInterpolator,
Walk_r_acromioclavicular_RollInterpolator,
Walk_r_ankle_RotationInterpolator,
Walk_r_elbow_RotationInterpolator,
Walk_r_hip_RotationInterpolator,
Walk_r_knee_RotationInterpolator,
Walk_r_metatarsal_PitchInterpolator,
Walk_r_shoulder_RotationInterpolator,
Walk_r_sternoclavicular_RollInterpolator,
Walk_r_thumb1_PitchInterpolator,
Walk_r_wrist_RotationInterpolator,
Walk_sacroiliac_YawInterpolator,
Walk_Touch,
Walk_upper_body_RotationInterpolator,
Walk_vc6_YawInterpolator,
Walk_vl5_YawInterpolator,
Walk_whole_body_RotationInterpolator,
Walk_whole_body_TranslationInterpolator,
WalkAnimation,
WalkText,
WalkTimer,
WalkTransform,
Yaw_Back,
Yaw_l_acromioclavicular_RollInterpolator,
Yaw_l_sternoclavicular_RollInterpolator,
Yaw_l_thumb1_PitchInterpolator,
Yaw_r_acromioclavicular_RollInterpolator,
Yaw_r_metatarsal_PitchInterpolator,
Yaw_r_sternoclavicular_RollInterpolator,
Yaw_r_thumb1_PitchInterpolator,
Yaw_sacroiliac_YawInterpolator,
Yaw_Touch,
Yaw_vc6_YawInterpolator,
Yaw_vl5_YawInterpolator,
Yaws_head_RotationInterpolator,
Yaws_l_ankle_RotationInterpolator,
Yaws_l_elbow_RotationInterpolator,
Yaws_l_hip_RotationInterpolator,
Yaws_l_knee_RotationInterpolator,
Yaws_l_shoulder_RotationInterpolator,
Yaws_l_wrist_RotationInterpolator,
Yaws_lower_body_RotationInterpolator,
Yaws_neck_RotationInterpolator,
Yaws_r_ankle_RotationInterpolator,
Yaws_r_elbow_RotationInterpolator,
Yaws_r_hip_RotationInterpolator,
Yaws_r_knee_RotationInterpolator,
Yaws_r_shoulder_RotationInterpolator,
Yaws_r_wrist_RotationInterpolator,
Yaws_upper_body_RotationInterpolator,
Yaws_whole_body_RotationInterpolator,
Yaws_whole_body_TranslationInterpolator,
YawsAnimation,
YawText,
YawTimer,
YawTransform
DEF nodes index:
_RollInterpolator,
Backing,
BehaviorSynchronization,
Circle0,
Circle1,
Circle2,
Clear,
CoordinateAxes,
CoordinateAxesAdjustedScale,
cordsys,
DiamondIFS,
hanim_back_view,
hanim_c1,
hanim_c2,
hanim_c3,
hanim_c4,
hanim_c5,
hanim_c6,
hanim_c7,
hanim_cervicale_pt,
hanim_chest_front_close_view,
hanim_crotch_pt,
hanim_eye_level_view,
hanim_feet_front_close_view,
hanim_front_close_view,
hanim_front_view,
hanim_head_front_close_view,
hanim_humanoid,
hanim_humanoid_root,
hanim_jaw,
hanim_knees_front_close_view,
hanim_l_acromioclavicular,
hanim_l_acromion_pt,
hanim_l_ankle,
hanim_l_asis_pt,
hanim_l_axilla_ant_pt,
hanim_l_axilla_post_pt,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_clavicale_pt,
hanim_l_clavicle,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_eyeball,
hanim_l_eyeball_joint,
hanim_l_eyeball_site_view,
hanim_l_eyebrow,
hanim_l_eyebrow_joint,
hanim_l_eyelid,
hanim_l_eyelid_joint,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_forefoot,
hanim_l_forefoot_tip,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_front_view,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_iliocristale_pt,
hanim_l_inclined_view,
hanim_l_index_distal,
hanim_l_index_distal_tip,
hanim_l_index_metacarpal,
hanim_l_index_middle,
hanim_l_index_proximal,
hanim_l_index0,
hanim_l_index1,
hanim_l_index2,
hanim_l_index3,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middle_distal,
hanim_l_middle_distal_tip,
hanim_l_middle_metacarpal,
hanim_l_middle_middle,
hanim_l_middle_proximal,
hanim_l_middle0,
hanim_l_middle1,
hanim_l_middle2,
hanim_l_middle3,
hanim_l_midproximal,
hanim_l_midtarsal,
hanim_l_neck_base_pt,
hanim_l_olecranon_pt,
hanim_l_pinky_distal,
hanim_l_pinky_distal_tip,
hanim_l_pinky_metacarpal,
hanim_l_pinky_middle,
hanim_l_pinky_proximal,
hanim_l_pinky0,
hanim_l_pinky1,
hanim_l_pinky2,
hanim_l_pinky3,
hanim_l_psis_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_rib10_pt,
hanim_l_ring_distal,
hanim_l_ring_distal_tip,
hanim_l_ring_metacarpal,
hanim_l_ring_middle,
hanim_l_ring_proximal,
hanim_l_ring0,
hanim_l_ring1,
hanim_l_ring2,
hanim_l_ring3,
hanim_l_scapula,
hanim_l_shoulder,
hanim_l_side_view,
hanim_l_sphyrion_pt,
hanim_l_sternoclavicular,
hanim_l_subtalar,
hanim_l_thelion_pt,
hanim_l_thigh,
hanim_l_thumb_distal,
hanim_l_thumb_distal_tip,
hanim_l_thumb_metacarpal,
hanim_l_thumb_proximal,
hanim_l_thumb1,
hanim_l_thumb2,
hanim_l_thumb3,
hanim_l_tragion_pt,
hanim_l_trochanterion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_l2,
hanim_l3,
hanim_l4,
hanim_l5,
hanim_navel_pt,
hanim_nuchale_pt,
hanim_pelvis,
hanim_pelvis_front_close_view,
hanim_r_acromioclavicular,
hanim_r_acromion_pt,
hanim_r_ankle,
hanim_r_asis_pt,
hanim_r_axilla_ant_pt,
hanim_r_axilla_post_pt,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_clavicale_pt,
hanim_r_clavicle,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_eyeball,
hanim_r_eyeball_joint,
hanim_r_eyeball_site_view,
hanim_r_eyebrow,
hanim_r_eyebrow_joint,
hanim_r_eyelid,
hanim_r_eyelid_joint,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_forefoot,
hanim_r_forefoot_tip,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_front_view,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_iliocristale_pt,
hanim_r_inclined_view,
hanim_r_index_distal,
hanim_r_index_distal_tip,
hanim_r_index_metacarpal,
hanim_r_index_middle,
hanim_r_index_proximal,
hanim_r_index0,
hanim_r_index1,
hanim_r_index2,
hanim_r_index3,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middle_distal,
hanim_r_middle_distal_tip,
hanim_r_middle_metacarpal,
hanim_r_middle_middle,
hanim_r_middle_proximal,
hanim_r_middle0,
hanim_r_middle1,
hanim_r_middle2,
hanim_r_middle3,
hanim_r_midproximal,
hanim_r_midtarsal,
hanim_r_neck_base_pt,
hanim_r_olecranon_pt,
hanim_r_pinky_distal,
hanim_r_pinky_distal_tip,
hanim_r_pinky_metacarpal,
hanim_r_pinky_middle,
hanim_r_pinky_proximal,
hanim_r_pinky0,
hanim_r_pinky1,
hanim_r_pinky2,
hanim_r_pinky3,
hanim_r_psis_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_rib10_pt,
hanim_r_ring_distal,
hanim_r_ring_distal_tip,
hanim_r_ring_metacarpal,
hanim_r_ring_middle,
hanim_r_ring_proximal,
hanim_r_ring0,
hanim_r_ring1,
hanim_r_ring2,
hanim_r_ring3,
hanim_r_scapula,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_sternoclavicular,
hanim_r_subtalar,
hanim_r_thelion_pt,
hanim_r_thigh,
hanim_r_thumb_distal,
hanim_r_thumb_distal_tip,
hanim_r_thumb_metacarpal,
hanim_r_thumb_proximal,
hanim_r_thumb1,
hanim_r_thumb2,
hanim_r_thumb3,
hanim_r_tragion_pt,
hanim_r_trochanterion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_rib10_midspine_pt,
hanim_sacroiliac,
hanim_sacrum,
hanim_sellion_pt,
hanim_side_close_view,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_substernale_pt,
hanim_supramenton_pt,
hanim_suprasternale_pt,
hanim_t1,
hanim_t10,
hanim_t11,
hanim_t12,
hanim_t2,
hanim_t3,
hanim_t4,
hanim_t5,
hanim_t6,
hanim_t7,
hanim_t8,
hanim_t9,
hanim_temporomandibular,
hanim_temporomandibular_l_site_pt,
hanim_temporomandibular_r_site_pt,
hanim_Top_view,
hanim_vc1,
hanim_vc2,
hanim_vc3,
hanim_vc4,
hanim_vc5,
hanim_vc6,
hanim_vc7,
hanim_vl1,
hanim_vl2,
hanim_vl3,
hanim_vl4,
hanim_vl5,
hanim_vt1,
hanim_vt10,
hanim_vt11,
hanim_vt12,
hanim_vt2,
hanim_vt3,
hanim_vt4,
hanim_vt5,
hanim_vt6,
hanim_vt7,
hanim_vt8,
hanim_vt9,
hanim_waist_preferred_post_pt,
HAnimJointAppearance,
HAnimJointShape,
HAnimSegmentLineColorRGBA,
HAnimSiteLineColorRGBA,
HAnimSiteShape,
HAnimSiteViewpointLineColorRGBA,
HAnimSiteViewpointShape,
HudProximitySensor,
HudXform,
Jump,
Jump_Back,
Jump_head_RotationInterpolator,
Jump_l_acromioclavicular_RollInterpolator,
Jump_l_ankle_RotationInterpolator,
Jump_l_elbow_RotationInterpolator,
Jump_l_hip_RotationInterpolator,
Jump_l_knee_RotationInterpolator,
Jump_l_shoulder_RotationInterpolator,
Jump_l_sternoclavicular_RollInterpolator,
Jump_l_thumb1_PitchInterpolator,
Jump_l_wrist_RotationInterpolator,
Jump_lower_body_RotationInterpolator,
Jump_neck_RotationInterpolator,
Jump_r_acromioclavicular_RollInterpolator,
Jump_r_ankle_RotationInterpolator,
Jump_r_elbow_RotationInterpolator,
Jump_r_hip_RotationInterpolator,
Jump_r_knee_RotationInterpolator,
Jump_r_metatarsal_PitchInterpolator,
Jump_r_shoulder_RotationInterpolator,
Jump_r_sternoclavicular_RollInterpolator,
Jump_r_thumb1_PitchInterpolator,
Jump_r_wrist_RotationInterpolator,
Jump_sacroiliac_YawInterpolator,
Jump_Touch,
Jump_upper_body_RotationInterpolator,
Jump_vc6_YawInterpolator,
Jump_vl5_YawInterpolator,
Jump_whole_body_RotationInterpolator,
Jump_whole_body_TranslationInterpolator,
JumpAnimation,
JumpTimer,
JumpTransform,
Kick_Back,
Kick_l_acromioclavicular_RollInterpolator,
Kick_l_ForeArm_PitchInterpolator,
Kick_l_hip_PitchInterpolator,
Kick_l_knee_PitchInterpolator,
Kick_l_shoulder_RollInterpolator,
Kick_l_sternoclavicular_RollInterpolator,
Kick_l_thumb1_PitchInterpolator,
Kick_l_wrist_RollInterpolator,
Kick_lower_body_RotationInterpolator,
Kick_neck_RotationInterpolator,
Kick_r_acromioclavicular_RollInterpolator,
Kick_r_ankle_PitchInterpolator,
Kick_r_ForeArm_PitchInterpolator,
Kick_r_hip_PitchInterpolator,
Kick_r_knee_PitchInterpolator,
Kick_r_metatarsal_PitchInterpolator,
Kick_r_shoulder_RollInterpolator,
Kick_r_sternoclavicular_RollInterpolator,
Kick_r_thumb1_PitchInterpolator,
Kick_r_wrist_RollInterpolator,
Kick_sacroiliac_YawInterpolator,
Kick_Touch,
Kick_upper_body_RotationInterpolator,
Kick_vc6_YawInterpolator,
Kick_vl5_YawInterpolator,
Kick_whole_body_RotationInterpolator,
Kick_whole_body_TranslationInterpolator,
KickAnimation,
KickText,
KickTimer,
KickTransform,
Orbit1,
Original_WorldInfo,
Pitch_Back,
Pitch_l_acromioclavicular_RollInterpolator,
Pitch_l_sternoclavicular_RollInterpolator,
Pitch_l_thumb1_PitchInterpolator,
Pitch_r_acromioclavicular_RollInterpolator,
Pitch_r_metatarsal_PitchInterpolator,
Pitch_r_sternoclavicular_RollInterpolator,
Pitch_r_thumb1_PitchInterpolator,
Pitch_sacroiliac_YawInterpolator,
Pitch_Touch,
Pitch_vc6_YawInterpolator,
Pitch_vl5_YawInterpolator,
Pitches_head_RotationInterpolator,
Pitches_l_ankle_RotationInterpolator,
Pitches_l_elbow_RotationInterpolator,
Pitches_l_hip_RotationInterpolator,
Pitches_l_knee_RotationInterpolator,
Pitches_l_shoulder_RotationInterpolator,
Pitches_l_wrist_RotationInterpolator,
Pitches_lower_body_RotationInterpolator,
Pitches_neck_RotationInterpolator,
Pitches_r_ankle_RotationInterpolator,
Pitches_r_elbow_RotationInterpolator,
Pitches_r_hip_RotationInterpolator,
Pitches_r_knee_RotationInterpolator,
Pitches_r_shoulder_RotationInterpolator,
Pitches_r_wrist_RotationInterpolator,
Pitches_upper_body_RotationInterpolator,
Pitches_whole_body_RotationInterpolator,
Pitches_whole_body_TranslationInterpolator,
PitchesAnimation,
PitchTextShape,
PitchTimer,
PitchTransform,
Roll_Back,
Roll_l_acromioclavicular_RollInterpolator,
Roll_l_sternoclavicular_RollInterpolator,
Roll_l_thumb1_PitchInterpolator,
Roll_r_acromioclavicular_RollInterpolator,
Roll_r_metatarsal_PitchInterpolator,
Roll_r_sternoclavicular_RollInterpolator,
Roll_r_thumb1_PitchInterpolator,
Roll_sacroiliac_YawInterpolator,
Roll_Touch,
Roll_vc6_YawInterpolator,
Roll_vl5_YawInterpolator,
Rolls_head_RotationInterpolator,
Rolls_l_ankle_RotationInterpolator,
Rolls_l_elbow_RotationInterpolator,
Rolls_l_hip_RotationInterpolator,
Rolls_l_knee_RotationInterpolator,
Rolls_l_shoulder_RotationInterpolator,
Rolls_l_wrist_RotationInterpolator,
Rolls_lower_body_RotationInterpolator,
Rolls_neck_RotationInterpolator,
Rolls_r_ankle_RotationInterpolator,
Rolls_r_elbow_RotationInterpolator,
Rolls_r_hip_RotationInterpolator,
Rolls_r_knee_RotationInterpolator,
Rolls_r_shoulder_RotationInterpolator,
Rolls_r_wrist_RotationInterpolator,
Rolls_upper_body_RotationInterpolator,
Rolls_whole_body_RotationInterpolator,
Rolls_whole_body_TranslationInterpolator,
RollsAnimation,
RollTimer,
RollTransform,
Run_Back,
Run_head_RotationInterpolator_Run,
Run_l_acromioclavicular_RollInterpolator,
Run_l_ankle_RotationInterpolator_Run,
Run_l_elbow_RotationInterpolator_Run,
Run_l_hip_RotationInterpolator_Run,
Run_l_knee_RotationInterpolator_Run,
Run_l_shoulder_RotationInterpolator_Run,
Run_l_sternoclavicular_RollInterpolator,
Run_l_thumb1_PitchInterpolator,
Run_l_wrist_RotationInterpolator_Run,
Run_lower_body_RotationInterpolator_Run,
Run_neck_RotationInterpolator_Run,
Run_r_acromioclavicular_RollInterpolator,
Run_r_ankle_RotationInterpolator_Run,
Run_r_elbow_RotationInterpolator_Run,
Run_r_hip_RotationInterpolator_Run,
Run_r_knee_RotationInterpolator_Run,
Run_r_metatarsal_PitchInterpolator,
Run_r_shoulder_RotationInterpolator_Run,
Run_r_sternoclavicular_RollInterpolator,
Run_r_thumb1_PitchInterpolator,
Run_r_wrist_RotationInterpolator_Run,
Run_sacroiliac_YawInterpolator,
Run_Touch,
Run_upper_body_RotationInterpolator_Run,
Run_vc6_YawInterpolator,
Run_vl5_YawInterpolator,
Run_whole_body_RotationInterpolator_Run,
Run_whole_body_TranslationInterpolator_Run,
RunAnimation,
RunText,
RunTimer,
RunTransform,
SiteViewpointDiamondIFS,
Stage,
Stand_Back,
Stand_head_RotationInterpolator,
Stand_l_acromioclavicular_RollInterpolator,
Stand_l_ankle_RotationInterpolator,
Stand_l_elbow_RotationInterpolator,
Stand_l_eyeball_RotationInterpolator,
Stand_l_hip_RotationInterpolator,
Stand_l_knee_RotationInterpolator,
Stand_l_shoulder_RotationInterpolator,
Stand_l_sternoclavicular_RollInterpolator,
Stand_l_thumb1_PitchInterpolator,
Stand_l_wrist_RotationInterpolator,
Stand_lower_body_RotationInterpolator,
Stand_neck_RotationInterpolator,
Stand_r_acromioclavicular_RollInterpolator,
Stand_r_ankle_RotationInterpolator,
Stand_r_elbow_RotationInterpolator,
Stand_r_eyeball_RotationInterpolator,
Stand_r_hip_RotationInterpolator,
Stand_r_index1_RollInterpolator,
Stand_r_index2_RollInterpolator,
Stand_r_index3_RollInterpolator,
Stand_r_knee_RotationInterpolator,
Stand_r_metatarsal_PitchInterpolator,
Stand_r_shoulder_RotationInterpolator,
Stand_r_sternoclavicular_RollInterpolator,
Stand_r_thumb1_PitchInterpolator,
Stand_r_wrist_RotationInterpolator,
Stand_sacroiliac_YawInterpolator,
Stand_Touch,
Stand_upper_body_RotationInterpolator,
Stand_vc6_YawInterpolator,
Stand_vl5_YawInterpolator,
Stand_whole_body_RotationInterpolator,
Stand_whole_body_TranslationInterpolator,
StandAnimation,
StandTextShape,
StandTimer,
StandTransform,
Stop_Back,
Stop_HumanoidRoot_RotationInterpolator,
Stop_HumanoidRoot_TranslationInterpolator,
Stop_l_acromioclavicular_RotationInterpolator,
Stop_l_ankle_RotationInterpolator,
Stop_l_elbow_RotationInterpolator,
Stop_l_eyeball_joint_RotationInterpolator,
Stop_l_hip_RotationInterpolator,
Stop_l_index0_RotationInterpolator,
Stop_l_index1_RotationInterpolator,
Stop_l_index2_RotationInterpolator,
Stop_l_index3_RotationInterpolator,
Stop_l_knee_RotationInterpolator,
Stop_l_metatarsal_RotationInterpolator,
Stop_l_middle0_RotationInterpolator,
Stop_l_middle1_RotationInterpolator,
Stop_l_middle2_RotationInterpolator,
Stop_l_middle3_RotationInterpolator,
Stop_l_midtarsal_RotationInterpolator,
Stop_l_pinky0_RotationInterpolator,
Stop_l_pinky1_RotationInterpolator,
Stop_l_pinky2_RotationInterpolator,
Stop_l_pinky3_RotationInterpolator,
Stop_l_ring0_RotationInterpolator,
Stop_l_ring1_RotationInterpolator,
Stop_l_ring2_RotationInterpolator,
Stop_l_ring3_RotationInterpolator,
Stop_l_shoulder_RotationInterpolator,
Stop_l_sternoclavicular_RotationInterpolator,
Stop_l_subtalar_RotationInterpolator,
Stop_l_thumb1_RotationInterpolator,
Stop_l_thumb2_RotationInterpolator,
Stop_l_thumb3_RotationInterpolator,
Stop_l_wrist_RotationInterpolator,
Stop_r_acromioclavicular_RotationInterpolator,
Stop_r_ankle_RotationInterpolator,
Stop_r_elbow_RotationInterpolator,
Stop_r_eyeball_joint_RotationInterpolator,
Stop_r_hip_RotationInterpolator,
Stop_r_index0_RotationInterpolator,
Stop_r_index1_RotationInterpolator,
Stop_r_index2_RotationInterpolator,
Stop_r_index3_RotationInterpolator,
Stop_r_knee_RotationInterpolator,
Stop_r_metatarsal_RotationInterpolator,
Stop_r_middle0_RotationInterpolator,
Stop_r_middle1_RotationInterpolator,
Stop_r_middle2_RotationInterpolator,
Stop_r_middle3_RotationInterpolator,
Stop_r_midtarsal_RotationInterpolator,
Stop_r_pinky0_RotationInterpolator,
Stop_r_pinky1_RotationInterpolator,
Stop_r_pinky2_RotationInterpolator,
Stop_r_pinky3_RotationInterpolator,
Stop_r_ring0_RotationInterpolator,
Stop_r_ring1_RotationInterpolator,
Stop_r_ring2_RotationInterpolator,
Stop_r_ring3_RotationInterpolator,
Stop_r_shoulder_RotationInterpolator,
Stop_r_sternoclavicular_RotationInterpolator,
Stop_r_subtalar_RotationInterpolator,
Stop_r_thumb1_RotationInterpolator,
Stop_r_thumb2_RotationInterpolator,
Stop_r_thumb3_RotationInterpolator,
Stop_r_wrist_RotationInterpolator,
Stop_sacroiliac_RotationInterpolator,
Stop_skullbase_RotationInterpolator,
Stop_Text,
Stop_Touch,
Stop_vc1_RotationInterpolator,
Stop_vc2_RotationInterpolator,
Stop_vc3_RotationInterpolator,
Stop_vc4_RotationInterpolator,
Stop_vc5_RotationInterpolator,
Stop_vc6_RotationInterpolator,
Stop_vc7_RotationInterpolator,
Stop_vl1_RotationInterpolator,
Stop_vl2_RotationInterpolator,
Stop_vl3_RotationInterpolator,
Stop_vl4_RotationInterpolator,
Stop_vl5_RotationInterpolator,
Stop_vt1_RotationInterpolator,
Stop_vt10_RotationInterpolator,
Stop_vt11_RotationInterpolator,
Stop_vt12_RotationInterpolator,
Stop_vt2_RotationInterpolator,
Stop_vt3_RotationInterpolator,
Stop_vt4_RotationInterpolator,
Stop_vt5_RotationInterpolator,
Stop_vt6_RotationInterpolator,
Stop_vt7_RotationInterpolator,
Stop_vt8_RotationInterpolator,
Stop_vt9_RotationInterpolator,
StopAnimation,
StopText,
StopTimer,
text_color,
UserInterface,
Walk_Back,
Walk_head_RotationInterpolator,
Walk_l_acromioclavicular_RollInterpolator,
Walk_l_ankle_RotationInterpolator,
Walk_l_elbow_RotationInterpolator,
Walk_l_hip_RotationInterpolator,
Walk_l_knee_RotationInterpolator,
Walk_l_shoulder_RotationInterpolator,
Walk_l_sternoclavicular_RollInterpolator,
Walk_l_thumb1_PitchInterpolator,
Walk_l_wrist_RotationInterpolator,
Walk_lower_body_RotationInterpolator,
Walk_neck_RotationInterpolator,
Walk_r_acromioclavicular_RollInterpolator,
Walk_r_ankle_RotationInterpolator,
Walk_r_elbow_RotationInterpolator,
Walk_r_hip_RotationInterpolator,
Walk_r_knee_RotationInterpolator,
Walk_r_metatarsal_PitchInterpolator,
Walk_r_shoulder_RotationInterpolator,
Walk_r_sternoclavicular_RollInterpolator,
Walk_r_thumb1_PitchInterpolator,
Walk_r_wrist_RotationInterpolator,
Walk_sacroiliac_YawInterpolator,
Walk_Touch,
Walk_upper_body_RotationInterpolator,
Walk_vc6_YawInterpolator,
Walk_vl5_YawInterpolator,
Walk_whole_body_RotationInterpolator,
Walk_whole_body_TranslationInterpolator,
WalkAnimation,
WalkText,
WalkTimer,
WalkTransform,
Yaw_Back,
Yaw_l_acromioclavicular_RollInterpolator,
Yaw_l_sternoclavicular_RollInterpolator,
Yaw_l_thumb1_PitchInterpolator,
Yaw_r_acromioclavicular_RollInterpolator,
Yaw_r_metatarsal_PitchInterpolator,
Yaw_r_sternoclavicular_RollInterpolator,
Yaw_r_thumb1_PitchInterpolator,
Yaw_sacroiliac_YawInterpolator,
Yaw_Touch,
Yaw_vc6_YawInterpolator,
Yaw_vl5_YawInterpolator,
Yaws_head_RotationInterpolator,
Yaws_l_ankle_RotationInterpolator,
Yaws_l_elbow_RotationInterpolator,
Yaws_l_hip_RotationInterpolator,
Yaws_l_knee_RotationInterpolator,
Yaws_l_shoulder_RotationInterpolator,
Yaws_l_wrist_RotationInterpolator,
Yaws_lower_body_RotationInterpolator,
Yaws_neck_RotationInterpolator,
Yaws_r_ankle_RotationInterpolator,
Yaws_r_elbow_RotationInterpolator,
Yaws_r_hip_RotationInterpolator,
Yaws_r_knee_RotationInterpolator,
Yaws_r_shoulder_RotationInterpolator,
Yaws_r_wrist_RotationInterpolator,
Yaws_upper_body_RotationInterpolator,
Yaws_whole_body_RotationInterpolator,
Yaws_whole_body_TranslationInterpolator,
YawsAnimation,
YawText,
YawTimer,
YawTransform
Index for Viewpoint nodes: Viewpoint_1, Viewpoint_2, Viewpoint_3, Viewpoint_4, Viewpoint_5, Viewpoint_6, Viewpoint_7, Viewpoint_8, Viewpoint_9, hanim_back_viewpoint, hanim_chest_front_close_viewpoint, hanim_eye_level_viewpoint, hanim_feet_front_close_viewpoint, hanim_front_close_viewpoint, hanim_front_viewpoint, hanim_head_front_close_viewpoint, hanim_knees_front_close_viewpoint, hanim_l_eyeball_site_viewpoint, hanim_l_hand_front_viewpoint, hanim_l_inclined_viewpoint, hanim_l_side_viewpoint, hanim_pelvis_front_close_viewpoint, hanim_r_eyeball_site_viewpoint, hanim_r_hand_front_viewpoint, hanim_r_inclined_viewpoint, hanim_side_close_viewpoint, hanim_Top_viewpoint
-->=============================================================================================================================
HAnimHumanoid hanim_humanoid skeleton holds X3D3 HAnim1 joints/segments/sites.
[key] jointname : segmentname ^ sitename
[nodes] HAnimJoint (94), : HAnimSegment (94), % HAnimDisplacer (0), $ HAnimMotion (0), ^ HAnimSite (109), @ skin nodes (0)
=============================================================================================================================
HAnimHumanoid DEF='hanim_humanoid name='humanoid' loa=''
skeleton
humanoid_root : sacrum
sacroiliac : pelvis ^ r_iliocristale_pt, r_trochanterion_pt, l_iliocristale_pt, l_trochanterion_pt, r_asis_pt, l_asis_pt, r_psis_pt, l_psis_pt, crotch_pt
| l_hip : l_thigh ^ l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
| | l_knee : l_calf
| | l_ankle : l_hindfoot ^ l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
| | l_subtalar : l_midproximal
| | l_midtarsal : l_middistal ^ l_metatarsal_pha1_pt
| | l_metatarsal : l_forefoot ^ l_forefoot_tip, l_metatarsal_pha5_pt, l_digit2_pt
| r_hip : r_thigh ^ r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
| r_knee : r_calf
| r_ankle : r_hindfoot ^ r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
| r_subtalar : r_midproximal
| r_midtarsal : r_middistal ^ r_metatarsal_pha1_pt
| r_metatarsal : r_forefoot ^ r_forefoot_tip, r_metatarsal_pha5_pt, r_digit2_pt
vl5 : l5 ^ waist_preferred_post_pt, navel_pt
vl4 : l4
vl3 : l3
vl2 : l2 ^ r_rib10_pt, l_rib10_pt, rib10_midspine_pt
vl1 : l1
vt12 : t12
vt11 : t11
vt10 : t10 ^ substernale_pt
vt9 : t9 ^ r_thelion_pt, l_thelion_pt
vt8 : t8
vt7 : t7
vt6 : t6
vt5 : t5
vt4 : t4
vt3 : t3
vt2 : t2
vt1 : t1 ^ suprasternale_pt, cervicale_pt
vc7 : c7 ^ r_neck_base_pt, l_neck_base_pt
| vc6 : c6
| vc5 : c5
| vc4 : c4
| vc3 : c3
| vc2 : c2
| vc1 : c1
| skullbase : skull ^ skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
| l_eyeball_joint : l_eyeball ^ l_eyeball_site_view
| l_eyelid_joint : l_eyelid
| l_eyebrow_joint : l_eyebrow
| r_eyeball_joint : r_eyeball ^ r_eyeball_site_view
| r_eyelid_joint : r_eyelid
| r_eyebrow_joint : r_eyebrow
| temporomandibular : jaw ^ temporomandibular_l_site_pt, temporomandibular_r_site_pt
l_sternoclavicular : l_clavicle ^ l_clavicale_pt, l_acromion_pt, l_axilla_ant_pt, l_axilla_post_pt
| l_acromioclavicular : l_scapula
| l_shoulder : l_upperarm ^ l_humeral_lateral_epicn_pt
| l_elbow : l_forearm ^ l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
| l_wrist : l_hand ^ l_metacarpal_pha2_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt, l_hand_front_view
| l_thumb1 : l_thumb_metacarpal
| | l_thumb2 : l_thumb_proximal
| | l_thumb3 : l_thumb_distal ^ l_thumb_distal_tip
| l_index0 : l_index_metacarpal
| | l_index1 : l_index_proximal
| | l_index2 : l_index_middle
| | l_index3 : l_index_distal ^ l_index_distal_tip, l_dactylion_pt
| l_middle0 : l_middle_metacarpal
| | l_middle1 : l_middle_proximal
| | l_middle2 : l_middle_middle
| | l_middle3 : l_middle_distal ^ l_middle_distal_tip
| l_ring0 : l_ring_metacarpal
| | l_ring1 : l_ring_proximal
| | l_ring2 : l_ring_middle
| | l_ring3 : l_ring_distal ^ l_ring_distal_tip
| l_pinky0 : l_pinky_metacarpal
| l_pinky1 : l_pinky_proximal
| l_pinky2 : l_pinky_middle
| l_pinky3 : l_pinky_distal ^ l_pinky_distal_tip
r_sternoclavicular : r_clavicle ^ r_clavicale_pt, r_acromion_pt, r_axilla_ant_pt, r_axilla_post_pt
r_acromioclavicular : r_scapula
r_shoulder : r_upperarm ^ r_humeral_lateral_epicn_pt
r_elbow : r_forearm ^ r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
r_wrist : r_hand ^ r_metacarpal_pha2_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt, r_hand_front_view
r_thumb1 : r_thumb_metacarpal
| r_thumb2 : r_thumb_proximal
| r_thumb3 : r_thumb_distal ^ r_thumb_distal_tip
r_index0 : r_index_metacarpal
| r_index1 : r_index_proximal
| r_index2 : r_index_middle
| r_index3 : r_index_distal ^ r_index_distal_tip, r_dactylion_pt
r_middle0 : r_middle_metacarpal
| r_middle1 : r_middle_proximal
| r_middle2 : r_middle_middle
| r_middle3 : r_middle_distal ^ r_middle_distal_tip
r_ring0 : r_ring_metacarpal
| r_ring1 : r_ring_proximal
| r_ring2 : r_ring_middle
| r_ring3 : r_ring_distal ^ r_ring_distal_tip
r_pinky0 : r_pinky_metacarpal
r_pinky1 : r_pinky_proximal
r_pinky2 : r_pinky_middle
r_pinky3 : r_pinky_distal ^ r_pinky_distal_tip
^ HAnimHumanoid humanoid holds 14 HAnimSite nodes: l_inclined_view, r_inclined_view, front_view, back_view, l_side_view, Top_view, front_close_view, side_close_view, head_front_close_view, chest_front_close_view, pelvis_front_close_view, knees_front_close_view, feet_front_close_view, eye_level_view
^ HAnimSegment pelvis holds 9 HAnimSite nodes: r_iliocristale_pt, r_trochanterion_pt, l_iliocristale_pt, l_trochanterion_pt, r_asis_pt, l_asis_pt, r_psis_pt, l_psis_pt, crotch_pt
^ HAnimSegment l_thigh holds 3 HAnimSite nodes: l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
^ HAnimSegment l_hindfoot holds 4 HAnimSite nodes: l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
^ HAnimSegment l_middistal holds 1 HAnimSite node: l_metatarsal_pha1_pt
^ HAnimSegment l_forefoot holds 3 HAnimSite nodes: l_forefoot_tip, l_metatarsal_pha5_pt, l_digit2_pt
^ HAnimSegment r_thigh holds 3 HAnimSite nodes: r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
^ HAnimSegment r_hindfoot holds 4 HAnimSite nodes: r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
^ HAnimSegment r_middistal holds 1 HAnimSite node: r_metatarsal_pha1_pt
^ HAnimSegment r_forefoot holds 3 HAnimSite nodes: r_forefoot_tip, r_metatarsal_pha5_pt, r_digit2_pt
^ HAnimSegment l5 holds 2 HAnimSite nodes: waist_preferred_post_pt, navel_pt
^ HAnimSegment l2 holds 3 HAnimSite nodes: r_rib10_pt, l_rib10_pt, rib10_midspine_pt
^ HAnimSegment t10 holds 1 HAnimSite node: substernale_pt
^ HAnimSegment t9 holds 2 HAnimSite nodes: r_thelion_pt, l_thelion_pt
^ HAnimSegment t1 holds 2 HAnimSite nodes: suprasternale_pt, cervicale_pt
^ HAnimSegment c7 holds 2 HAnimSite nodes: r_neck_base_pt, l_neck_base_pt
^ HAnimSegment skull holds 10 HAnimSite nodes: skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
^ HAnimSegment l_eyeball holds 1 HAnimSite node: l_eyeball_site_view
^ HAnimSegment r_eyeball holds 1 HAnimSite node: r_eyeball_site_view
^ HAnimSegment jaw holds 2 HAnimSite nodes: temporomandibular_l_site_pt, temporomandibular_r_site_pt
^ HAnimSegment l_clavicle holds 4 HAnimSite nodes: l_clavicale_pt, l_acromion_pt, l_axilla_ant_pt, l_axilla_post_pt
^ HAnimSegment l_upperarm holds 1 HAnimSite node: l_humeral_lateral_epicn_pt
^ HAnimSegment l_forearm holds 4 HAnimSite nodes: l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
^ HAnimSegment l_hand holds 4 HAnimSite nodes: l_metacarpal_pha2_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt, l_hand_front_view
^ HAnimSegment l_thumb_distal holds 1 HAnimSite node: l_thumb_distal_tip
^ HAnimSegment l_index_distal holds 2 HAnimSite nodes: l_index_distal_tip, l_dactylion_pt
^ HAnimSegment l_middle_distal holds 1 HAnimSite node: l_middle_distal_tip
^ HAnimSegment l_ring_distal holds 1 HAnimSite node: l_ring_distal_tip
^ HAnimSegment l_pinky_distal holds 1 HAnimSite node: l_pinky_distal_tip
^ HAnimSegment r_clavicle holds 4 HAnimSite nodes: r_clavicale_pt, r_acromion_pt, r_axilla_ant_pt, r_axilla_post_pt
^ HAnimSegment r_upperarm holds 1 HAnimSite node: r_humeral_lateral_epicn_pt
^ HAnimSegment r_forearm holds 4 HAnimSite nodes: r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
^ HAnimSegment r_hand holds 4 HAnimSite nodes: r_metacarpal_pha2_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt, r_hand_front_view
^ HAnimSegment r_thumb_distal holds 1 HAnimSite node: r_thumb_distal_tip
^ HAnimSegment r_index_distal holds 2 HAnimSite nodes: r_index_distal_tip, r_dactylion_pt
^ HAnimSegment r_middle_distal holds 1 HAnimSite node: r_middle_distal_tip
^ HAnimSegment r_ring_distal holds 1 HAnimSite node: r_ring_distal_tip
^ HAnimSegment r_pinky_distal holds 1 HAnimSite node: r_pinky_distal_tip
=============================================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes. Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
| <HAnimHumanoid DEF='hanim_humanoid' name='humanoid' version ='1.0' | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| info=' | "authorName=Matthew T. Beitler Joe D. Williams Don Brutzman" "authorEmail=HAnim@web3D.org" "copyright=none" "creationDate=12 May 1999" "usageRestrictions=none" "humanoidVersion=2.0" "height=1.7504" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2735 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2735 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2734 | <Viewpoint DEF='hanim_l_inclined_viewpoint' description='left inclined' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2736 | <Anchor description='HAnimSite Viewpoint hanim_l_inclined_view' url=' "#hanim_l_inclined_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2737 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2738 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2739 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2740 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2741 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2735 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2745 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2745 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2744 | <Viewpoint DEF='hanim_r_inclined_viewpoint' centerOfRotation='0 0.9 0' description='right inclined' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2746 | <Anchor description='HAnimSite Viewpoint hanim_r_inclined_view' url=' "#hanim_r_inclined_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2747 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2748 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2749 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2750 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2751 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2745 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2755 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2755 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2754 | <Viewpoint DEF='hanim_front_viewpoint' centerOfRotation='0 0.9 0' description='front' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2756 | <Anchor description='HAnimSite Viewpoint hanim_front_view' url=' "#hanim_front_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2757 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2758 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2759 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2760 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2761 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2755 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2765 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2765 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2764 | <Viewpoint DEF='hanim_back_viewpoint' centerOfRotation='0 0.9 0' description='back' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2766 | <Anchor description='HAnimSite Viewpoint hanim_back_view' url=' "#hanim_back_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2767 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2768 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2769 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2770 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2771 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2765 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2775 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2775 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2774 | <Viewpoint DEF='hanim_l_side_viewpoint' centerOfRotation='0 0.9 0' description='left side' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2776 | <Anchor description='HAnimSite Viewpoint hanim_l_side_view' url=' "#hanim_l_side_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2777 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2778 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2779 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2780 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2781 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2775 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2785 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2785 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2784 | <Viewpoint DEF='hanim_Top_viewpoint' centerOfRotation='0 0.9 0' description='Top' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2786 | <Anchor description='HAnimSite Viewpoint hanim_Top_view' url=' "#hanim_Top_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2787 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2788 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2789 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2790 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2791 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2785 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2795 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2795 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2794 | <Viewpoint DEF='hanim_front_close_viewpoint' centerOfRotation='0 0 1.575' description='front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2796 | <Anchor description='HAnimSite Viewpoint hanim_front_close_view' url=' "#hanim_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2797 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2798 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2799 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2800 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2801 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2795 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2804 | <Viewpoint DEF='hanim_side_close_viewpoint' centerOfRotation='1.6 0 0' description='side close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2806 | <Anchor description='HAnimSite Viewpoint hanim_side_close_view' url=' "#hanim_side_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2807 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2808 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2809 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2810 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2811 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2805 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2815 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2815 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2814 | <Viewpoint DEF='hanim_head_front_close_viewpoint' centerOfRotation='0 0 1' description='head front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2816 | <Anchor description='HAnimSite Viewpoint hanim_head_front_close_view' url=' "#hanim_head_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2817 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2818 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2819 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2820 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2821 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2815 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2825 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2825 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2824 | <Viewpoint DEF='hanim_chest_front_close_viewpoint' centerOfRotation='0 0 1' description='chest front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2826 | <Anchor description='HAnimSite Viewpoint hanim_chest_front_close_view' url=' "#hanim_chest_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2827 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2828 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2829 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2830 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2831 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2825 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2835 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2835 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2834 | <Viewpoint DEF='hanim_pelvis_front_close_viewpoint' centerOfRotation='0 0 1' description='pelvis front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2836 | <Anchor description='HAnimSite Viewpoint hanim_pelvis_front_close_view' url=' "#hanim_pelvis_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2837 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2838 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2839 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2840 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2841 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2835 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2844 | <Viewpoint DEF='hanim_knees_front_close_viewpoint' centerOfRotation='0 0.4 0' description='knees front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2846 | <Anchor description='HAnimSite Viewpoint hanim_knees_front_close_view' url=' "#hanim_knees_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2847 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2848 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2849 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2850 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2851 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2845 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2855 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2855 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2854 | <Viewpoint DEF='hanim_feet_front_close_viewpoint' description='feet front close' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2856 | <Anchor description='HAnimSite Viewpoint hanim_feet_front_close_view' url=' "#hanim_feet_front_close_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2857 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2858 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2859 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2860 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2861 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2855 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2731 | <!-- USE nodes for inverse kinematics (IK) engines and other tools --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2732 | <!-- Top-level HAnimSite/Viewpoint nodes for viewing the humanoid without being affected by body motion --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2865 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2865 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2864 | <Viewpoint DEF='hanim_eye_level_viewpoint' description='eye level looking forward' orientation='0 1 0 3.1416' position='0 0 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2866 | <Anchor description='HAnimSite Viewpoint hanim_eye_level_view' url=' "#hanim_eye_level_viewpoint" '> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2867 | <LOD forceTransitions='true' range='0.04'> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2868 | <WorldInfo info='"hide diamond when close"'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2869 | <Shape USE='HAnimSiteViewpointShape'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2870 | </LOD> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2871 | </Anchor> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2865 | <!-- HAnimSite/Viewpoint visualization shape --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2873 |
<HAnimJoint USE='hanim_humanoid_root' containerField='joints'/>
|
2874 |
<HAnimJoint USE='hanim_sacroiliac' containerField='joints'/>
|
2875 |
<HAnimJoint USE='hanim_vl5' containerField='joints'/>
|
2876 |
<HAnimJoint USE='hanim_vl4' containerField='joints'/>
|
2877 |
<HAnimJoint USE='hanim_vl3' containerField='joints'/>
|
2878 |
<HAnimJoint USE='hanim_vl2' containerField='joints'/>
|
2879 |
<HAnimJoint USE='hanim_vl1' containerField='joints'/>
|
2880 |
<HAnimJoint USE='hanim_vt12' containerField='joints'/>
|
2881 |
<HAnimJoint USE='hanim_vt11' containerField='joints'/>
|
2882 |
<HAnimJoint USE='hanim_vt10' containerField='joints'/>
|
2883 |
<HAnimJoint USE='hanim_vt9' containerField='joints'/>
|
2884 |
<HAnimJoint USE='hanim_vt8' containerField='joints'/>
|
2885 |
<HAnimJoint USE='hanim_vt7' containerField='joints'/>
|
2886 |
<HAnimJoint USE='hanim_vt6' containerField='joints'/>
|
2887 |
<HAnimJoint USE='hanim_vt5' containerField='joints'/>
|
2888 |
<HAnimJoint USE='hanim_vt4' containerField='joints'/>
|
2889 |
<HAnimJoint USE='hanim_vt3' containerField='joints'/>
|
2890 |
<HAnimJoint USE='hanim_vt2' containerField='joints'/>
|
2891 |
<HAnimJoint USE='hanim_vt1' containerField='joints'/>
|
2892 |
<HAnimJoint USE='hanim_vc7' containerField='joints'/>
|
2893 |
<HAnimJoint USE='hanim_vc6' containerField='joints'/>
|
2894 |
<HAnimJoint USE='hanim_vc5' containerField='joints'/>
|
2895 |
<HAnimJoint USE='hanim_vc4' containerField='joints'/>
|
2896 |
<HAnimJoint USE='hanim_vc3' containerField='joints'/>
|
2897 |
<HAnimJoint USE='hanim_vc2' containerField='joints'/>
|
2898 |
<HAnimJoint USE='hanim_vc1' containerField='joints'/>
|
2899 |
<HAnimJoint USE='hanim_skullbase' containerField='joints'/>
|
2900 |
<HAnimJoint USE='hanim_temporomandibular' containerField='joints'/>
|
2901 |
<HAnimJoint USE='hanim_l_acromioclavicular' containerField='joints'/>
|
2902 |
<HAnimJoint USE='hanim_r_acromioclavicular' containerField='joints'/>
|
2903 |
<HAnimJoint USE='hanim_l_ankle' containerField='joints'/>
|
2904 |
<HAnimJoint USE='hanim_r_ankle' containerField='joints'/>
|
2905 |
<HAnimJoint USE='hanim_l_elbow' containerField='joints'/>
|
2906 |
<HAnimJoint USE='hanim_r_elbow' containerField='joints'/>
|
2907 |
<HAnimJoint USE='hanim_l_eyeball_joint' containerField='joints'/>
|
2908 |
<HAnimJoint USE='hanim_r_eyeball_joint' containerField='joints'/>
|
2909 |
<HAnimJoint USE='hanim_l_eyebrow_joint' containerField='joints'/>
|
2910 |
<HAnimJoint USE='hanim_r_eyebrow_joint' containerField='joints'/>
|
2911 |
<HAnimJoint USE='hanim_l_eyelid_joint' containerField='joints'/>
|
2912 |
<HAnimJoint USE='hanim_r_eyelid_joint' containerField='joints'/>
|
2913 |
<HAnimJoint USE='hanim_l_hip' containerField='joints'/>
|
2914 |
<HAnimJoint USE='hanim_r_hip' containerField='joints'/>
|
2915 |
<HAnimJoint USE='hanim_l_index0' containerField='joints'/>
|
2916 |
<HAnimJoint USE='hanim_r_index0' containerField='joints'/>
|
2917 |
<HAnimJoint USE='hanim_l_index1' containerField='joints'/>
|
2918 |
<HAnimJoint USE='hanim_r_index1' containerField='joints'/>
|
2919 |
<HAnimJoint USE='hanim_l_index2' containerField='joints'/>
|
2920 |
<HAnimJoint USE='hanim_r_index2' containerField='joints'/>
|
2921 |
<HAnimJoint USE='hanim_l_index3' containerField='joints'/>
|
2922 |
<HAnimJoint USE='hanim_r_index3' containerField='joints'/>
|
2923 |
<HAnimJoint USE='hanim_l_knee' containerField='joints'/>
|
2924 |
<HAnimJoint USE='hanim_r_knee' containerField='joints'/>
|
2925 |
<HAnimJoint USE='hanim_l_metatarsal' containerField='joints'/>
|
2926 |
<HAnimJoint USE='hanim_r_metatarsal' containerField='joints'/>
|
2927 |
<HAnimJoint USE='hanim_l_middle0' containerField='joints'/>
|
2928 |
<HAnimJoint USE='hanim_r_middle0' containerField='joints'/>
|
2929 |
<HAnimJoint USE='hanim_l_middle1' containerField='joints'/>
|
2930 |
<HAnimJoint USE='hanim_r_middle1' containerField='joints'/>
|
2931 |
<HAnimJoint USE='hanim_l_middle2' containerField='joints'/>
|
2932 |
<HAnimJoint USE='hanim_r_middle2' containerField='joints'/>
|
2933 |
<HAnimJoint USE='hanim_l_middle3' containerField='joints'/>
|
2934 |
<HAnimJoint USE='hanim_r_middle3' containerField='joints'/>
|
2935 |
<HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/>
|
2936 |
<HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/>
|
2937 |
<HAnimJoint USE='hanim_l_pinky0' containerField='joints'/>
|
2938 |
<HAnimJoint USE='hanim_r_pinky0' containerField='joints'/>
|
2939 |
<HAnimJoint USE='hanim_l_pinky1' containerField='joints'/>
|
2940 |
<HAnimJoint USE='hanim_r_pinky1' containerField='joints'/>
|
2941 |
<HAnimJoint USE='hanim_l_pinky2' containerField='joints'/>
|
2942 |
<HAnimJoint USE='hanim_r_pinky2' containerField='joints'/>
|
2943 |
<HAnimJoint USE='hanim_l_pinky3' containerField='joints'/>
|
2944 |
<HAnimJoint USE='hanim_r_pinky3' containerField='joints'/>
|
2945 |
<HAnimJoint USE='hanim_l_ring0' containerField='joints'/>
|
2946 |
<HAnimJoint USE='hanim_r_ring0' containerField='joints'/>
|
2947 |
<HAnimJoint USE='hanim_l_ring1' containerField='joints'/>
|
2948 |
<HAnimJoint USE='hanim_r_ring1' containerField='joints'/>
|
2949 |
<HAnimJoint USE='hanim_l_ring2' containerField='joints'/>
|
2950 |
<HAnimJoint USE='hanim_r_ring2' containerField='joints'/>
|
2951 |
<HAnimJoint USE='hanim_l_ring3' containerField='joints'/>
|
2952 |
<HAnimJoint USE='hanim_r_ring3' containerField='joints'/>
|
2953 |
<HAnimJoint USE='hanim_l_shoulder' containerField='joints'/>
|
2954 |
<HAnimJoint USE='hanim_r_shoulder' containerField='joints'/>
|
2955 |
<HAnimJoint USE='hanim_l_sternoclavicular' containerField='joints'/>
|
2956 |
<HAnimJoint USE='hanim_r_sternoclavicular' containerField='joints'/>
|
2957 |
<HAnimJoint USE='hanim_l_subtalar' containerField='joints'/>
|
2958 |
<HAnimJoint USE='hanim_r_subtalar' containerField='joints'/>
|
2959 |
<HAnimJoint USE='hanim_l_thumb1' containerField='joints'/>
|
2960 |
<HAnimJoint USE='hanim_r_thumb1' containerField='joints'/>
|
2961 |
<HAnimJoint USE='hanim_l_thumb2' containerField='joints'/>
|
2962 |
<HAnimJoint USE='hanim_r_thumb2' containerField='joints'/>
|
2963 |
<HAnimJoint USE='hanim_l_thumb3' containerField='joints'/>
|
2964 |
<HAnimJoint USE='hanim_r_thumb3' containerField='joints'/>
|
2965 |
<HAnimJoint USE='hanim_l_wrist' containerField='joints'/>
|
2966 |
<HAnimJoint USE='hanim_r_wrist' containerField='joints'/>
|
2967 |
<HAnimSegment USE='hanim_pelvis' containerField='segments'/>
|
2968 |
<HAnimSegment USE='hanim_skull' containerField='segments'/>
|
2969 |
<HAnimSegment USE='hanim_jaw' containerField='segments'/>
|
2970 |
<HAnimSegment USE='hanim_c1' containerField='segments'/>
|
2971 |
<HAnimSegment USE='hanim_c2' containerField='segments'/>
|
2972 |
<HAnimSegment USE='hanim_c3' containerField='segments'/>
|
2973 |
<HAnimSegment USE='hanim_c4' containerField='segments'/>
|
2974 |
<HAnimSegment USE='hanim_c5' containerField='segments'/>
|
2975 |
<HAnimSegment USE='hanim_c6' containerField='segments'/>
|
2976 |
<HAnimSegment USE='hanim_c7' containerField='segments'/>
|
2977 |
<HAnimSegment USE='hanim_t1' containerField='segments'/>
|
2978 |
<HAnimSegment USE='hanim_t2' containerField='segments'/>
|
2979 |
<HAnimSegment USE='hanim_t3' containerField='segments'/>
|
2980 |
<HAnimSegment USE='hanim_t4' containerField='segments'/>
|
2981 |
<HAnimSegment USE='hanim_t5' containerField='segments'/>
|
2982 |
<HAnimSegment USE='hanim_t6' containerField='segments'/>
|
2983 |
<HAnimSegment USE='hanim_t7' containerField='segments'/>
|
2984 |
<HAnimSegment USE='hanim_t8' containerField='segments'/>
|
2985 |
<HAnimSegment USE='hanim_t9' containerField='segments'/>
|
2986 |
<HAnimSegment USE='hanim_t10' containerField='segments'/>
|
2987 |
<HAnimSegment USE='hanim_t11' containerField='segments'/>
|
2988 |
<HAnimSegment USE='hanim_t12' containerField='segments'/>
|
2989 |
<HAnimSegment USE='hanim_l1' containerField='segments'/>
|
2990 |
<HAnimSegment USE='hanim_l2' containerField='segments'/>
|
2991 |
<HAnimSegment USE='hanim_l3' containerField='segments'/>
|
2992 |
<HAnimSegment USE='hanim_l4' containerField='segments'/>
|
2993 |
<HAnimSegment USE='hanim_l5' containerField='segments'/>
|
2994 |
<HAnimSegment USE='hanim_sacrum' containerField='segments'/>
|
2995 |
<HAnimSegment USE='hanim_l_calf' containerField='segments'/>
|
2996 |
<HAnimSegment USE='hanim_r_calf' containerField='segments'/>
|
2997 |
<HAnimSegment USE='hanim_l_clavicle' containerField='segments'/>
|
2998 |
<HAnimSegment USE='hanim_r_clavicle' containerField='segments'/>
|
2999 |
<HAnimSegment USE='hanim_l_eyeball' containerField='segments'/>
|
3000 |
<HAnimSegment USE='hanim_r_eyeball' containerField='segments'/>
|
3001 |
<HAnimSegment USE='hanim_l_eyebrow' containerField='segments'/>
|
3002 |
<HAnimSegment USE='hanim_r_eyebrow' containerField='segments'/>
|
3003 |
<HAnimSegment USE='hanim_l_eyelid' containerField='segments'/>
|
3004 |
<HAnimSegment USE='hanim_r_eyelid' containerField='segments'/>
|
3005 |
<HAnimSegment USE='hanim_l_forearm' containerField='segments'/>
|
3006 |
<HAnimSegment USE='hanim_r_forearm' containerField='segments'/>
|
3007 |
<HAnimSegment USE='hanim_l_forefoot' containerField='segments'/>
|
3008 |
<HAnimSegment USE='hanim_r_forefoot' containerField='segments'/>
|
3009 |
<HAnimSegment USE='hanim_l_hand' containerField='segments'/>
|
3010 |
<HAnimSegment USE='hanim_r_hand' containerField='segments'/>
|
3011 |
<HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/>
|
3012 |
<HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/>
|
3013 |
<HAnimSegment USE='hanim_l_index_distal' containerField='segments'/>
|
3014 |
<HAnimSegment USE='hanim_r_index_distal' containerField='segments'/>
|
3015 |
<HAnimSegment USE='hanim_l_index_metacarpal' containerField='segments'/>
|
3016 |
<HAnimSegment USE='hanim_r_index_metacarpal' containerField='segments'/>
|
3017 |
<HAnimSegment USE='hanim_l_index_middle' containerField='segments'/>
|
3018 |
<HAnimSegment USE='hanim_r_index_middle' containerField='segments'/>
|
3019 |
<HAnimSegment USE='hanim_l_index_proximal' containerField='segments'/>
|
3020 |
<HAnimSegment USE='hanim_r_index_proximal' containerField='segments'/>
|
3021 |
<HAnimSegment USE='hanim_l_middistal' containerField='segments'/>
|
3022 |
<HAnimSegment USE='hanim_r_middistal' containerField='segments'/>
|
3023 |
<HAnimSegment USE='hanim_l_middle_distal' containerField='segments'/>
|
3024 |
<HAnimSegment USE='hanim_r_middle_distal' containerField='segments'/>
|
3025 |
<HAnimSegment USE='hanim_l_middle_metacarpal' containerField='segments'/>
|
3026 |
<HAnimSegment USE='hanim_r_middle_metacarpal' containerField='segments'/>
|
3027 |
<HAnimSegment USE='hanim_l_middle_middle' containerField='segments'/>
|
3028 |
<HAnimSegment USE='hanim_r_middle_middle' containerField='segments'/>
|
3029 |
<HAnimSegment USE='hanim_l_middle_proximal' containerField='segments'/>
|
3030 |
<HAnimSegment USE='hanim_r_middle_proximal' containerField='segments'/>
|
3031 |
<HAnimSegment USE='hanim_l_midproximal' containerField='segments'/>
|
3032 |
<HAnimSegment USE='hanim_r_midproximal' containerField='segments'/>
|
3033 |
<HAnimSegment USE='hanim_l_pinky_distal' containerField='segments'/>
|
3034 |
<HAnimSegment USE='hanim_r_pinky_distal' containerField='segments'/>
|
3035 |
<HAnimSegment USE='hanim_l_pinky_metacarpal' containerField='segments'/>
|
3036 |
<HAnimSegment USE='hanim_r_pinky_metacarpal' containerField='segments'/>
|
3037 |
<HAnimSegment USE='hanim_l_pinky_middle' containerField='segments'/>
|
3038 |
<HAnimSegment USE='hanim_r_pinky_middle' containerField='segments'/>
|
3039 |
<HAnimSegment USE='hanim_l_pinky_proximal' containerField='segments'/>
|
3040 |
<HAnimSegment USE='hanim_r_pinky_proximal' containerField='segments'/>
|
3041 |
<HAnimSegment USE='hanim_l_ring_distal' containerField='segments'/>
|
3042 |
<HAnimSegment USE='hanim_r_ring_distal' containerField='segments'/>
|
3043 |
<HAnimSegment USE='hanim_l_ring_metacarpal' containerField='segments'/>
|
3044 |
<HAnimSegment USE='hanim_r_ring_metacarpal' containerField='segments'/>
|
3045 |
<HAnimSegment USE='hanim_l_ring_middle' containerField='segments'/>
|
3046 |
<HAnimSegment USE='hanim_r_ring_middle' containerField='segments'/>
|
3047 |
<HAnimSegment USE='hanim_l_ring_proximal' containerField='segments'/>
|
3048 |
<HAnimSegment USE='hanim_r_ring_proximal' containerField='segments'/>
|
3049 |
<HAnimSegment USE='hanim_l_scapula' containerField='segments'/>
|
3050 |
<HAnimSegment USE='hanim_r_scapula' containerField='segments'/>
|
3051 |
<HAnimSegment USE='hanim_l_thigh' containerField='segments'/>
|
3052 |
<HAnimSegment USE='hanim_r_thigh' containerField='segments'/>
|
3053 |
<HAnimSegment USE='hanim_l_thumb_distal' containerField='segments'/>
|
3054 |
<HAnimSegment USE='hanim_r_thumb_distal' containerField='segments'/>
|
3055 |
<HAnimSegment USE='hanim_l_thumb_metacarpal' containerField='segments'/>
|
3056 |
<HAnimSegment USE='hanim_r_thumb_metacarpal' containerField='segments'/>
|
3057 |
<HAnimSegment USE='hanim_l_thumb_proximal' containerField='segments'/>
|
3058 |
<HAnimSegment USE='hanim_r_thumb_proximal' containerField='segments'/>
|
3059 |
<HAnimSegment USE='hanim_l_upperarm' containerField='segments'/>
|
3060 |
<HAnimSegment USE='hanim_r_upperarm' containerField='segments'/>
|
3061 |
<HAnimSite USE='hanim_crotch_pt' containerField='sites'/>
|
3062 |
<HAnimSite USE='hanim_skull_tip' containerField='sites'/>
|
3063 |
<HAnimSite USE='hanim_sellion_pt' containerField='sites'/>
|
3064 |
<HAnimSite USE='hanim_supramenton_pt' containerField='sites'/>
|
3065 |
<HAnimSite USE='hanim_nuchale_pt' containerField='sites'/>
|
3066 |
<HAnimSite USE='hanim_suprasternale_pt' containerField='sites'/>
|
3067 |
<HAnimSite USE='hanim_cervicale_pt' containerField='sites'/>
|
3068 |
<HAnimSite USE='hanim_substernale_pt' containerField='sites'/>
|
3069 |
<HAnimSite USE='hanim_rib10_midspine_pt' containerField='sites'/>
|
3070 |
<HAnimSite USE='hanim_waist_preferred_post_pt' containerField='sites'/>
|
3071 |
<HAnimSite USE='hanim_navel_pt' containerField='sites'/>
|
3072 |
<HAnimSite USE='hanim_l_acromion_pt' containerField='sites'/>
|
3073 |
<HAnimSite USE='hanim_r_acromion_pt' containerField='sites'/>
|
3074 |
<HAnimSite USE='hanim_r_asis_pt' containerField='sites'/>
|
3075 |
<HAnimSite USE='hanim_l_asis_pt' containerField='sites'/>
|
3076 |
<HAnimSite USE='hanim_l_axilla_ant_pt' containerField='sites'/>
|
3077 |
<HAnimSite USE='hanim_r_axilla_ant_pt' containerField='sites'/>
|
3078 |
<HAnimSite USE='hanim_l_axilla_post_pt' containerField='sites'/>
|
3079 |
<HAnimSite USE='hanim_r_axilla_post_pt' containerField='sites'/>
|
3080 |
<HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/>
|
3081 |
<HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/>
|
3082 |
<HAnimSite USE='hanim_l_clavicale_pt' containerField='sites'/>
|
3083 |
<HAnimSite USE='hanim_r_clavicale_pt' containerField='sites'/>
|
3084 |
<HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/>
|
3085 |
<HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/>
|
3086 |
<HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/>
|
3087 |
<HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/>
|
3088 |
<HAnimSite USE='hanim_l_eyeball_site_view' containerField='viewpoints'/>
|
3089 |
<HAnimSite USE='hanim_r_eyeball_site_view' containerField='viewpoints'/>
|
3090 |
<HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/>
|
3091 |
<HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/>
|
3092 |
<HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/>
|
3093 |
<HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/>
|
3094 |
<HAnimSite USE='hanim_l_forefoot_tip' containerField='sites'/>
|
3095 |
<HAnimSite USE='hanim_r_forefoot_tip' containerField='sites'/>
|
3096 |
<HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/>
|
3097 |
<HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/>
|
3098 |
<HAnimSite USE='hanim_l_hand_front_view' containerField='viewpoints'/>
|
3099 |
<HAnimSite USE='hanim_r_hand_front_view' containerField='viewpoints'/>
|
3100 |
<HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/>
|
3101 |
<HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/>
|
3102 |
<HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/>
|
3103 |
<HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/>
|
3104 |
<HAnimSite USE='hanim_r_iliocristale_pt' containerField='sites'/>
|
3105 |
<HAnimSite USE='hanim_l_iliocristale_pt' containerField='sites'/>
|
3106 |
<HAnimSite USE='hanim_l_index_distal_tip' containerField='sites'/>
|
3107 |
<HAnimSite USE='hanim_r_index_distal_tip' containerField='sites'/>
|
3108 |
<HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/>
|
3109 |
<HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/>
|
3110 |
<HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/>
|
3111 |
<HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/>
|
3112 |
<HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/>
|
3113 |
<HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/>
|
3114 |
<HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/>
|
3115 |
<HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/>
|
3116 |
<HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/>
|
3117 |
<HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/>
|
3118 |
<HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/>
|
3119 |
<HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/>
|
3120 |
<HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/>
|
3121 |
<HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/>
|
3122 |
<HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/>
|
3123 |
<HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/>
|
3124 |
<HAnimSite USE='hanim_l_middle_distal_tip' containerField='sites'/>
|
3125 |
<HAnimSite USE='hanim_r_middle_distal_tip' containerField='sites'/>
|
3126 |
<HAnimSite USE='hanim_r_neck_base_pt' containerField='sites'/>
|
3127 |
<HAnimSite USE='hanim_l_neck_base_pt' containerField='sites'/>
|
3128 |
<HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/>
|
3129 |
<HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/>
|
3130 |
<HAnimSite USE='hanim_l_pinky_distal_tip' containerField='sites'/>
|
3131 |
<HAnimSite USE='hanim_r_pinky_distal_tip' containerField='sites'/>
|
3132 |
<HAnimSite USE='hanim_r_psis_pt' containerField='sites'/>
|
3133 |
<HAnimSite USE='hanim_l_psis_pt' containerField='sites'/>
|
3134 |
<HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/>
|
3135 |
<HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/>
|
3136 |
<HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/>
|
3137 |
<HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/>
|
3138 |
<HAnimSite USE='hanim_r_rib10_pt' containerField='sites'/>
|
3139 |
<HAnimSite USE='hanim_l_rib10_pt' containerField='sites'/>
|
3140 |
<HAnimSite USE='hanim_l_ring_distal_tip' containerField='sites'/>
|
3141 |
<HAnimSite USE='hanim_r_ring_distal_tip' containerField='sites'/>
|
3142 |
<HAnimSite USE='hanim_temporomandibular_l_site_pt' containerField='sites'/>
|
3143 |
<HAnimSite USE='hanim_temporomandibular_r_site_pt' containerField='sites'/>
|
3144 |
<HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/>
|
3145 |
<HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/>
|
3146 |
<HAnimSite USE='hanim_r_thelion_pt' containerField='sites'/>
|
3147 |
<HAnimSite USE='hanim_l_thelion_pt' containerField='sites'/>
|
3148 |
<HAnimSite USE='hanim_l_thumb_distal_tip' containerField='sites'/>
|
3149 |
<HAnimSite USE='hanim_r_thumb_distal_tip' containerField='sites'/>
|
3150 |
<HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/>
|
3151 |
<HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/>
|
3152 |
<HAnimSite USE='hanim_r_trochanterion_pt' containerField='sites'/>
|
3153 |
<HAnimSite USE='hanim_l_trochanterion_pt' containerField='sites'/>
|
3154 |
<HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/>
|
3155 |
<HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/>
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
</HAnimHumanoid> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Event Graph ROUTE Table entries with 735 ROUTE connections total, showing X3D event-model relationships for this scene.
Each row shows an event cascade that may occur during a single timestamp interval between frame renderings, as part of the X3D execution model.
| line 56
TouchSensor |
description='HAnimJoint HumanoidRoot, HAnimSegment sacrum' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 83
TouchSensor |
description='HAnimJoint sacroiliac, HAnimSegment pelvis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 166
TouchSensor |
description='HAnimSite r_iliocristale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 178
TouchSensor |
description='HAnimSite r_trochanterion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 183
TouchSensor |
description='HAnimSite l_iliocristale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 188
TouchSensor |
description='HAnimSite l_trochanterion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 193
TouchSensor |
description='HAnimSite r_asis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 198
TouchSensor |
description='HAnimSite l_asis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 203
TouchSensor |
description='HAnimSite r_psis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 208
TouchSensor |
description='HAnimSite l_psis' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 213
TouchSensor |
description='HAnimSite crotch' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 220
TouchSensor |
description='HAnimJoint l_hip, HAnimSegment l_thigh' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 254
TouchSensor |
description='HAnimSite l_knee_crease' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 259
TouchSensor |
description='HAnimSite l_femoral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 264
TouchSensor |
description='HAnimSite l_femoral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 271
TouchSensor |
description='HAnimJoint l_knee, HAnimSegment l_calf' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 286
TouchSensor |
description='HAnimJoint l_ankle, HAnimSegment l_hindfoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 327
TouchSensor |
description='HAnimSite l_lateral_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 332
TouchSensor |
description='HAnimSite l_medial_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 337
TouchSensor |
description='HAnimSite l_sphyrion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 342
TouchSensor |
description='HAnimSite l_calcaneous_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 349
TouchSensor |
description='HAnimJoint l_subtalar, HAnimSegment l_midproximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 364
TouchSensor |
description='HAnimJoint l_midtarsal, HAnimSegment l_middistal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 384
TouchSensor |
description='HAnimSite l_metatarsal_pha1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 391
TouchSensor |
description='HAnimJoint l_metatarsal, HAnimSegment l_forefoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 418
TouchSensor |
description='HAnimSite l_forefoot_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 423
TouchSensor |
description='HAnimSite l_metatarsal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 428
TouchSensor |
description='HAnimSite l_digit2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 441
TouchSensor |
description='HAnimJoint r_hip, HAnimSegment r_thigh' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 475
TouchSensor |
description='HAnimSite r_knee_crease' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 480
TouchSensor |
description='HAnimSite r_femoral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 485
TouchSensor |
description='HAnimSite r_femoral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 492
TouchSensor |
description='HAnimJoint r_knee, HAnimSegment r_calf' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 507
TouchSensor |
description='HAnimJoint r_ankle, HAnimSegment r_hindfoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 548
TouchSensor |
description='HAnimSite r_lateral_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 553
TouchSensor |
description='HAnimSite r_medial_malleolus' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 558
TouchSensor |
description='HAnimSite r_sphyrion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 563
TouchSensor |
description='HAnimSite r_calcaneous_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 570
TouchSensor |
description='HAnimJoint r_subtalar, HAnimSegment r_midproximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 585
TouchSensor |
description='HAnimJoint r_midtarsal, HAnimSegment r_middistal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 605
TouchSensor |
description='HAnimSite r_metatarsal_pha1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 612
TouchSensor |
description='HAnimJoint r_metatarsal, HAnimSegment r_forefoot' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 639
TouchSensor |
description='HAnimSite r_forefoot_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 644
TouchSensor |
description='HAnimSite r_metatarsal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 649
TouchSensor |
description='HAnimSite r_digit2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 663
TouchSensor |
description='HAnimJoint vl5, HAnimSegment l5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 690
TouchSensor |
description='HAnimSite waist_preferred_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 695
TouchSensor |
description='HAnimSite navel' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 702
TouchSensor |
description='HAnimJoint vl4, HAnimSegment l4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 717
TouchSensor |
description='HAnimJoint vl3, HAnimSegment l3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 732
TouchSensor |
description='HAnimJoint vl2, HAnimSegment l2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 766
TouchSensor |
description='HAnimSite r_rib10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 771
TouchSensor |
description='HAnimSite l_rib10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 776
TouchSensor |
description='HAnimSite rib10_midspine' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 783
TouchSensor |
description='HAnimJoint vl1, HAnimSegment l1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 798
TouchSensor |
description='HAnimJoint vt12, HAnimSegment t12' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 813
TouchSensor |
description='HAnimJoint vt11, HAnimSegment t11' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 828
TouchSensor |
description='HAnimJoint vt10, HAnimSegment t10' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 848
TouchSensor |
description='HAnimSite substernale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 855
TouchSensor |
description='HAnimJoint vt9, HAnimSegment t9' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 882
TouchSensor |
description='HAnimSite r_thelion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 887
TouchSensor |
description='HAnimSite l_thelion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 894
TouchSensor |
description='HAnimJoint vt8, HAnimSegment t8' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 909
TouchSensor |
description='HAnimJoint vt7, HAnimSegment t7' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 924
TouchSensor |
description='HAnimJoint vt6, HAnimSegment t6' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 939
TouchSensor |
description='HAnimJoint vt5, HAnimSegment t5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 954
TouchSensor |
description='HAnimJoint vt4, HAnimSegment t4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 969
TouchSensor |
description='HAnimJoint vt3, HAnimSegment t3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 984
TouchSensor |
description='HAnimJoint vt2, HAnimSegment t2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 999
TouchSensor |
description='HAnimJoint vt1, HAnimSegment t1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1040
TouchSensor |
description='HAnimSite suprasternale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1045
TouchSensor |
description='HAnimSite cervicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1052
TouchSensor |
description='HAnimJoint vc7, HAnimSegment c7' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1079
TouchSensor |
description='HAnimSite r_neck_base' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1084
TouchSensor |
description='HAnimSite l_neck_base' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1091
TouchSensor |
description='HAnimJoint vc6, HAnimSegment c6' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1106
TouchSensor |
description='HAnimJoint vc5, HAnimSegment c5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1121
TouchSensor |
description='HAnimJoint vc4, HAnimSegment c4' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1136
TouchSensor |
description='HAnimJoint vc3, HAnimSegment c3' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1151
TouchSensor |
description='HAnimJoint vc2, HAnimSegment c2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1166
TouchSensor |
description='HAnimJoint vc1, HAnimSegment c1' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1181
TouchSensor |
description='HAnimJoint skullbase, HAnimSegment skull' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1307
TouchSensor |
description='HAnimSite skull_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1312
TouchSensor |
description='HAnimSite sellion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1317
TouchSensor |
description='HAnimSite r_infraorbitale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1322
TouchSensor |
description='HAnimSite l_infraorbitale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1327
TouchSensor |
description='HAnimSite supramenton' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1332
TouchSensor |
description='HAnimSite r_tragion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1337
TouchSensor |
description='HAnimSite r_gonion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1342
TouchSensor |
description='HAnimSite l_tragion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1347
TouchSensor |
description='HAnimSite l_gonion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1352
TouchSensor |
description='HAnimSite nuchale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1359
TouchSensor |
description='HAnimJoint l_eyeball_joint, HAnimSegment l_eyeball' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1392
TouchSensor |
description='HAnimJoint l_eyelid_joint, HAnimSegment l_eyelid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1401
TouchSensor |
description='HAnimJoint l_eyebrow_joint, HAnimSegment l_eyebrow' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1410
TouchSensor |
description='HAnimJoint r_eyeball_joint, HAnimSegment r_eyeball' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1436
TouchSensor |
description='HAnimJoint r_eyelid_joint, HAnimSegment r_eyelid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1445
TouchSensor |
description='HAnimJoint r_eyebrow_joint, HAnimSegment r_eyebrow' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1455
TouchSensor |
description='HAnimJoint temporomandibular, HAnimSegment jaw' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1475
TouchSensor |
description='HAnimSite temporomandibular_l_site' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1480
TouchSensor |
description='HAnimSite temporomandibular_r_site' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1496
TouchSensor |
description='HAnimJoint l_sternoclavicular, HAnimSegment l_clavicle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1537
TouchSensor |
description='HAnimSite l_clavicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1542
TouchSensor |
description='HAnimSite l_acromion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1547
TouchSensor |
description='HAnimSite l_axilla_ant' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1552
TouchSensor |
description='HAnimSite l_axilla_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1559
TouchSensor |
description='HAnimJoint l_acromioclavicular, HAnimSegment l_scapula' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1574
TouchSensor |
description='HAnimJoint l_shoulder, HAnimSegment l_upperarm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1594
TouchSensor |
description='HAnimSite l_humeral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1601
TouchSensor |
description='HAnimJoint l_elbow, HAnimSegment l_forearm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1642
TouchSensor |
description='HAnimSite l_radial_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1647
TouchSensor |
description='HAnimSite l_olecranon' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1652
TouchSensor |
description='HAnimSite l_humeral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1657
TouchSensor |
description='HAnimSite l_radiale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1664
TouchSensor |
description='HAnimJoint l_wrist, HAnimSegment l_hand' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1733
TouchSensor |
description='HAnimSite l_metacarpal_pha2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1738
TouchSensor |
description='HAnimSite l_ulnar_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1743
TouchSensor |
description='HAnimSite l_metacarpal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1760
TouchSensor |
description='HAnimJoint l_thumb1, HAnimSegment l_thumb_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1775
TouchSensor |
description='HAnimJoint l_thumb2, HAnimSegment l_thumb_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1790
TouchSensor |
description='HAnimJoint l_thumb3, HAnimSegment l_thumb_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1803
TouchSensor |
description='HAnimSite l_thumb_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1813
TouchSensor |
description='HAnimJoint l_index0, HAnimSegment l_index_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1828
TouchSensor |
description='HAnimJoint l_index1, HAnimSegment l_index_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1843
TouchSensor |
description='HAnimJoint l_index2, HAnimSegment l_index_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1858
TouchSensor |
description='HAnimJoint l_index3, HAnimSegment l_index_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1878
TouchSensor |
description='HAnimSite l_index_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1883
TouchSensor |
description='HAnimSite l_dactylion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1894
TouchSensor |
description='HAnimJoint l_middle0, HAnimSegment l_middle_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1909
TouchSensor |
description='HAnimJoint l_middle1, HAnimSegment l_middle_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1924
TouchSensor |
description='HAnimJoint l_middle2, HAnimSegment l_middle_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1939
TouchSensor |
description='HAnimJoint l_middle3, HAnimSegment l_middle_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1952
TouchSensor |
description='HAnimSite l_middle_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1963
TouchSensor |
description='HAnimJoint l_ring0, HAnimSegment l_ring_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1978
TouchSensor |
description='HAnimJoint l_ring1, HAnimSegment l_ring_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 1993
TouchSensor |
description='HAnimJoint l_ring2, HAnimSegment l_ring_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2008
TouchSensor |
description='HAnimJoint l_ring3, HAnimSegment l_ring_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2021
TouchSensor |
description='HAnimSite l_ring_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2032
TouchSensor |
description='HAnimJoint l_pinky0, HAnimSegment l_pinky_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2047
TouchSensor |
description='HAnimJoint l_pinky1, HAnimSegment l_pinky_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2062
TouchSensor |
description='HAnimJoint l_pinky2, HAnimSegment l_pinky_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2077
TouchSensor |
description='HAnimJoint l_pinky3, HAnimSegment l_pinky_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2090
TouchSensor |
description='HAnimSite l_pinky_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2106
TouchSensor |
description='HAnimJoint r_sternoclavicular, HAnimSegment r_clavicle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2147
TouchSensor |
description='HAnimSite r_clavicale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2152
TouchSensor |
description='HAnimSite r_acromion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2157
TouchSensor |
description='HAnimSite r_axilla_ant' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2162
TouchSensor |
description='HAnimSite r_axilla_post' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2169
TouchSensor |
description='HAnimJoint r_acromioclavicular, HAnimSegment r_scapula' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2184
TouchSensor |
description='HAnimJoint r_shoulder, HAnimSegment r_upperarm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2204
TouchSensor |
description='HAnimSite r_humeral_lateral_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2211
TouchSensor |
description='HAnimJoint r_elbow, HAnimSegment r_forearm' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2252
TouchSensor |
description='HAnimSite r_radial_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2257
TouchSensor |
description='HAnimSite r_olecranon' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2262
TouchSensor |
description='HAnimSite r_humeral_medial_epicn' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2267
TouchSensor |
description='HAnimSite r_radiale' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2274
TouchSensor |
description='HAnimJoint r_wrist, HAnimSegment r_hand' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2343
TouchSensor |
description='HAnimSite r_metacarpal_pha2' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2348
TouchSensor |
description='HAnimSite r_ulnar_styloid' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2353
TouchSensor |
description='HAnimSite r_metacarpal_pha5' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2370
TouchSensor |
description='HAnimJoint r_thumb1, HAnimSegment r_thumb_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2385
TouchSensor |
description='HAnimJoint r_thumb2, HAnimSegment r_thumb_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2400
TouchSensor |
description='HAnimJoint r_thumb3, HAnimSegment r_thumb_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2413
TouchSensor |
description='HAnimSite r_thumb_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2423
TouchSensor |
description='HAnimJoint r_index0, HAnimSegment r_index_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2438
TouchSensor |
description='HAnimJoint r_index1, HAnimSegment r_index_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2453
TouchSensor |
description='HAnimJoint r_index2, HAnimSegment r_index_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2468
TouchSensor |
description='HAnimJoint r_index3, HAnimSegment r_index_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2488
TouchSensor |
description='HAnimSite r_index_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2493
TouchSensor |
description='HAnimSite r_dactylion' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2504
TouchSensor |
description='HAnimJoint r_middle0, HAnimSegment r_middle_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2519
TouchSensor |
description='HAnimJoint r_middle1, HAnimSegment r_middle_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2534
TouchSensor |
description='HAnimJoint r_middle2, HAnimSegment r_middle_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2549
TouchSensor |
description='HAnimJoint r_middle3, HAnimSegment r_middle_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2562
TouchSensor |
description='HAnimSite r_middle_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2573
TouchSensor |
description='HAnimJoint r_ring0, HAnimSegment r_ring_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2588
TouchSensor |
description='HAnimJoint r_ring1, HAnimSegment r_ring_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2603
TouchSensor |
description='HAnimJoint r_ring2, HAnimSegment r_ring_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2618
TouchSensor |
description='HAnimJoint r_ring3, HAnimSegment r_ring_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2631
TouchSensor |
description='HAnimSite r_ring_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2642
TouchSensor |
description='HAnimJoint r_pinky0, HAnimSegment r_pinky_metacarpal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2657
TouchSensor |
description='HAnimJoint r_pinky1, HAnimSegment r_pinky_proximal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2672
TouchSensor |
description='HAnimJoint r_pinky2, HAnimSegment r_pinky_middle' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2687
TouchSensor |
description='HAnimJoint r_pinky3, HAnimSegment r_pinky_distal' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| line 2700
TouchSensor |
description='HAnimSite r_pinky_distal_tip' No direct ROUTE connection found for events to/from this node. This TouchSensor node is an author-provided hint for peer geometry. |
| The Jump_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Jump_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Kick_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Kick_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Pitch_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Pitch_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Roll_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Roll_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Run_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Run_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Run_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Stand_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Stand_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Stop_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Stop_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
| The Walk_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
YawTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Walk_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
| The Yaw_Touch node has 9 outgoing ROUTEs, only $maxROUTEdepth=8 are listed here. | |||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
StandTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
PitchTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
RollTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
WalkTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
RunTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
JumpTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
KickTimer
TimeSensor stopTime SFTime |
||||||
|
Yaw_Touch
TouchSensor touchTime SFTime |
StopTimer
TimeSensor stopTime SFTime |
||||||
|
HudProximitySensor
ProximitySensor position_changed SFVec3f |
HudXform
Transform translation SFVec3f |
|
|
HudProximitySensor
ProximitySensor orientation_changed SFRotation |
HudXform
Transform rotation SFRotation |
| line 1373
Anchor |
description='HAnimSite Viewpoint hanim_l_eyeball_site_view' No direct ROUTE connection found for events to/from this node. |
| line 1424
Anchor |
description='HAnimSite Viewpoint hanim_r_eyeball_site_view' No direct ROUTE connection found for events to/from this node. |
| line 1749
Anchor |
description='HAnimSite Viewpoint hanim_l_hand_front_view' No direct ROUTE connection found for events to/from this node. |
| line 2359
Anchor |
description='HAnimSite Viewpoint hanim_r_hand_front_view' No direct ROUTE connection found for events to/from this node. |
| line 2736
Anchor |
description='HAnimSite Viewpoint hanim_l_inclined_view' No direct ROUTE connection found for events to/from this node. |
| line 2746
Anchor |
description='HAnimSite Viewpoint hanim_r_inclined_view' No direct ROUTE connection found for events to/from this node. |
| line 2756
Anchor |
description='HAnimSite Viewpoint hanim_front_view' No direct ROUTE connection found for events to/from this node. |
| line 2766
Anchor |
description='HAnimSite Viewpoint hanim_back_view' No direct ROUTE connection found for events to/from this node. |
| line 2776
Anchor |
description='HAnimSite Viewpoint hanim_l_side_view' No direct ROUTE connection found for events to/from this node. |
| line 2786
Anchor |
description='HAnimSite Viewpoint hanim_Top_view' No direct ROUTE connection found for events to/from this node. |
| line 2796
Anchor |
description='HAnimSite Viewpoint hanim_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2806
Anchor |
description='HAnimSite Viewpoint hanim_side_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2816
Anchor |
description='HAnimSite Viewpoint hanim_head_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2826
Anchor |
description='HAnimSite Viewpoint hanim_chest_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2836
Anchor |
description='HAnimSite Viewpoint hanim_pelvis_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2846
Anchor |
description='HAnimSite Viewpoint hanim_knees_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2856
Anchor |
description='HAnimSite Viewpoint hanim_feet_front_close_view' No direct ROUTE connection found for events to/from this node. |
| line 2866
Anchor |
description='HAnimSite Viewpoint hanim_eye_level_view' No direct ROUTE connection found for events to/from this node. |
<!--
Online at
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}