
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 4.0//EN" "https://www.web3d.org/specifications/x3d-4.0.dtd">
|
| 3 | <X3D profile='Immersive' version='4.0' xmlns:xsd='https://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-4.0.xsd'> |
| 4 | <head> |
| 5 | <component level='2' name='HAnim'/> |
| 6 | <meta name='title' content=' JoeSkeletonSkinSiteSaluteWalk.x3d '/> |
| 7 | <meta name='description' content='Comprehensive LOA4 example showing skeleton, skin, sites and interpolator animation together. All name, DEF, USE, fromNode, toNode values upgraded from legacy HAnim v1 to HAnim v2.'/> |
| 8 | <meta name='creator' content='Joe D. Williams'/> |
| 9 | <meta name='translator' content='Michalis Kamburelis'/> |
| 10 | <meta name='translator' content='Don Brutzman'/> |
| 11 | <meta name='translator' content='Joe D. Williams'/> |
| 12 | <meta name='created' content='9 January 2004'/> |
| 13 | <meta name='translated' content='4 December 2022'/> |
| 14 | <meta name='modified' content='16 March 2026'/> |
| 15 | <meta name=' TODO ' content=' X3dTidy warning: look for missing underscore and digit number as suffix of improperly named HAnimJoint name=l_metatarsal '/> |
| 16 | <meta name='reference' content='JoeSkeletonSkinSiteSaluteWalk.original.x3dv'/> |
| 17 | <meta name='reference' content='JoeSkeletonSkinSiteSaluteWalk.modified1.x3dv'/> |
| 18 | <meta name='reference' content='JoeSkeletonSkinSiteSaluteWalk.modified2.x3dv'/> |
| 19 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_X3D-Edit.png'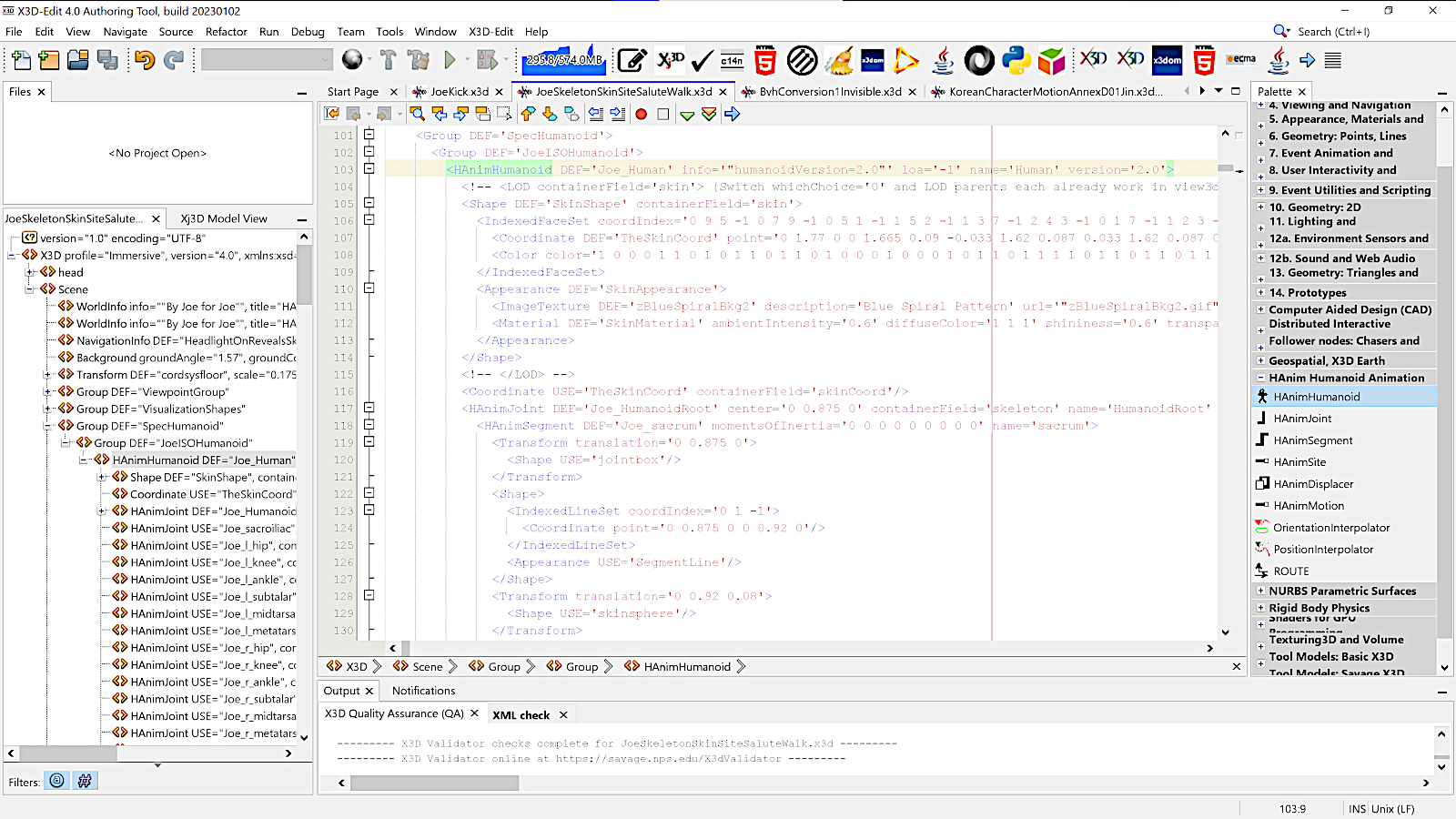 /> />
|
| 20 | <meta name='drawing' content='JoeSkeletonSkinSiteSaluteWalk_composite.vsdx'/> |
| 21 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_composite.2023JAN2.png'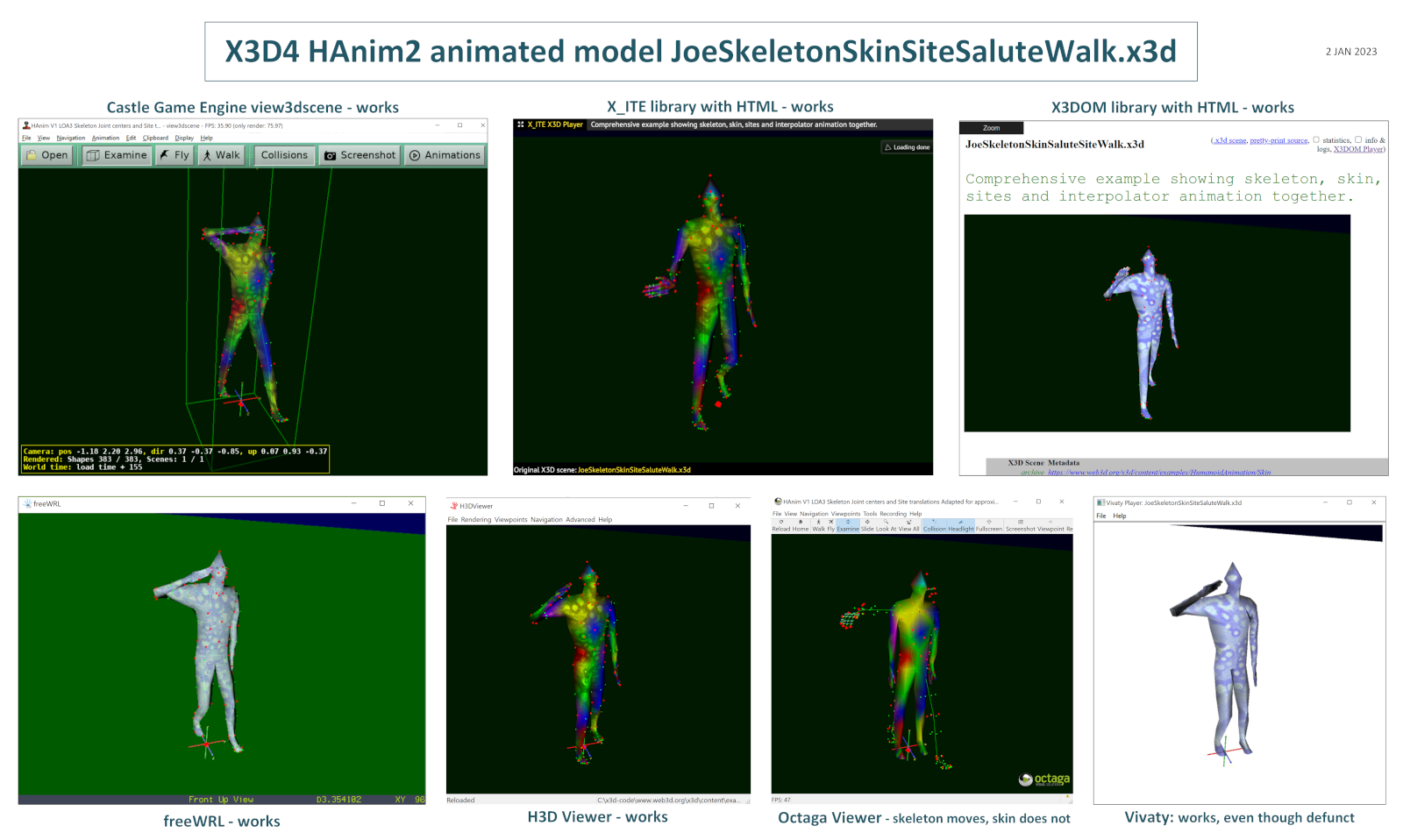 /> />
|
| 22 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_view3dscene.png'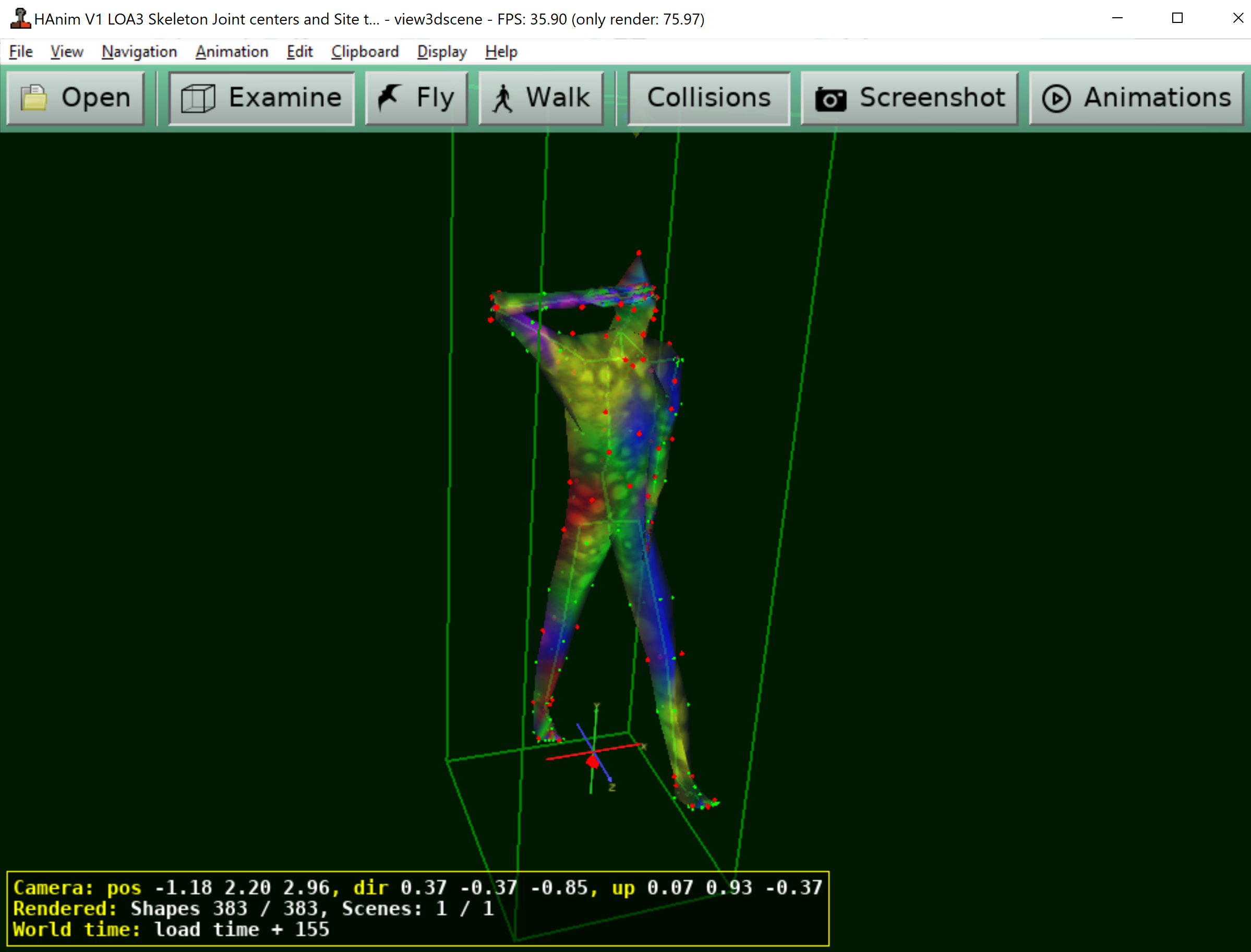 /> />
|
| 23 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_X_ITE.png'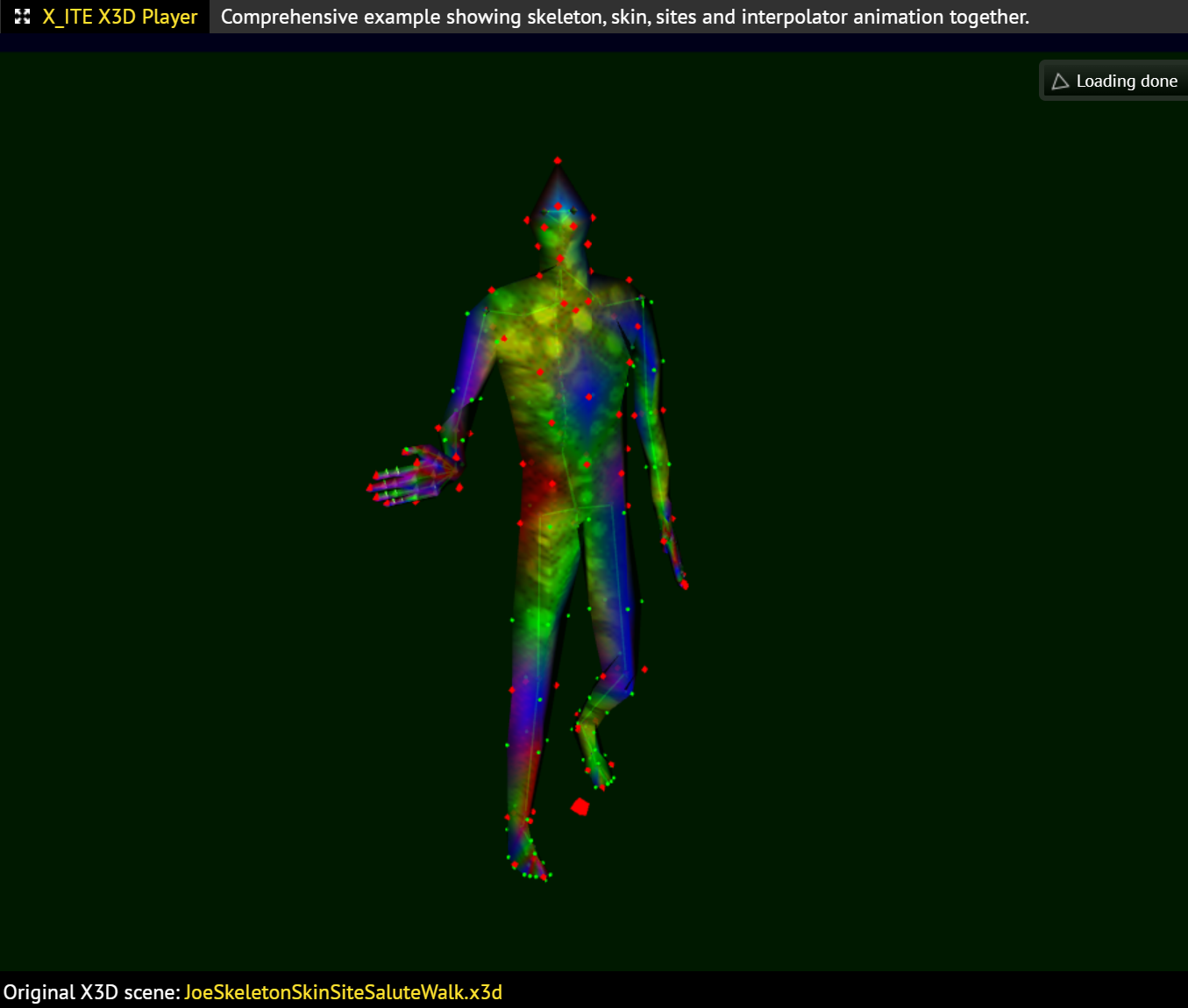 /> />
|
| 24 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_X3DOM.png' /> />
|
| 25 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_H3DViewer.png' /> />
|
| 26 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_freeWrl.png' /> />
|
| 27 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_Octaga.png' /> />
|
| 28 |
<meta name='Image' content='JoeSkeletonSkinSiteSaluteWalk_vivaty.png' /> />
|
| 29 | <meta name='generator' content='tovrmlx3d, https://castle-engine.io/convert.php'/> |
| 30 | <meta name='reference' content='https://castle-engine.io/view3dscene.php#section_converting'/> |
| 31 | <meta name='generator' content='X3D-Edit 4.0, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 32 | <meta name='generator' content=' X3D Tidy, https://www.web3d.org/x3d/stylesheets/X3dTidy.html '/> |
| 33 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Skin/JoeSkeletonSkinSiteSaluteWalk.x3d '/> |
| 34 | <meta name='license' content='../license.html'/> |
| 35 | <meta name='generator' content=' X3DJSAIL https://www.web3d.org/specifications/java/X3DJSAIL.html '/> |
| 36 | </head> |
Event Graph ROUTE Table shows event connections.
HAnimHumanoid model visualization report: Human HAnimHumanoid Report
-->
<!--
![]() DEF nodes index:
boxCoords,
CoordinateAxes,
cordsysfloor,
EyeballsRotation,
HeadlightOnRevealsSkinTextureAndColors,
HUMANOIDROOT_ANIMATOR,
HUMANOIDROOT_POSITION_ANIMATOR,
Joe_c1,
Joe_c2,
Joe_c3,
Joe_c4,
Joe_c5,
Joe_c6,
Joe_c7,
Joe_cervicale_pt,
Joe_crotch_pt,
Joe_floormarker_pt,
Joe_Human,
Joe_humanoid_root,
Joe_l_acromioclavicular,
Joe_l_acromion_pt,
Joe_l_asis_pt,
Joe_l_axilla_distal_pt,
Joe_l_axilla_proximal_pt,
Joe_l_calcaneus_posterior_pt,
Joe_l_calf,
Joe_l_carpal,
Joe_l_carpal_distal_interphalangeal_2,
Joe_l_carpal_distal_interphalangeal_3,
Joe_l_carpal_distal_interphalangeal_4,
Joe_l_carpal_distal_interphalangeal_5,
Joe_l_carpal_distal_phalanx_1,
Joe_l_carpal_distal_phalanx_1_tip,
Joe_l_carpal_distal_phalanx_2,
Joe_l_carpal_distal_phalanx_2_tip,
Joe_l_carpal_distal_phalanx_3,
Joe_l_carpal_distal_phalanx_3_tip,
Joe_l_carpal_distal_phalanx_4,
Joe_l_carpal_distal_phalanx_4_tip,
Joe_l_carpal_distal_phalanx_5,
Joe_l_carpal_distal_phalanx_5_tip,
Joe_l_carpal_interphalangeal_1,
Joe_l_carpal_middle_phalanx_2,
Joe_l_carpal_middle_phalanx_3,
Joe_l_carpal_middle_phalanx_4,
Joe_l_carpal_middle_phalanx_5,
Joe_l_carpal_proximal_interphalangeal_2,
Joe_l_carpal_proximal_interphalangeal_3,
Joe_l_carpal_proximal_interphalangeal_4,
Joe_l_carpal_proximal_interphalangeal_5,
Joe_l_carpal_proximal_phalanx_1,
Joe_l_carpal_proximal_phalanx_2,
Joe_l_carpal_proximal_phalanx_3,
Joe_l_carpal_proximal_phalanx_4,
Joe_l_carpal_proximal_phalanx_5,
Joe_l_carpometacarpal_1,
Joe_l_carpometacarpal_2,
Joe_l_carpometacarpal_3,
Joe_l_carpometacarpal_4,
Joe_l_carpometacarpal_5,
Joe_l_clavicle,
Joe_l_clavicle_pt,
Joe_l_dactylion_pt,
Joe_l_elbow,
Joe_l_eyeball,
Joe_l_eyeball_joint,
Joe_l_femoral_lateral_epicondyle_pt,
Joe_l_femoral_medial_epicondyle_pt,
Joe_l_forearm,
Joe_l_gonion_pt,
Joe_l_hip,
Joe_l_humeral_lateral_epicondyle_pt,
Joe_l_humeral_medial_epicondyle_pt,
Joe_l_iliocristale_pt,
Joe_l_infraorbitale_pt,
Joe_l_knee,
Joe_l_knee_crease_pt,
Joe_l_lateral_malleolus_pt,
Joe_l_medial_malleolus_pt,
Joe_l_metacarpal_1,
Joe_l_metacarpal_2,
Joe_l_metacarpal_3,
Joe_l_metacarpal_4,
Joe_l_metacarpal_5,
Joe_l_metacarpal_phalanx_2_pt,
Joe_l_metacarpal_phalanx_5_pt,
Joe_l_metacarpophalangeal_1,
Joe_l_metacarpophalangeal_2,
Joe_l_metacarpophalangeal_3,
Joe_l_metacarpophalangeal_4,
Joe_l_metacarpophalangeal_5,
Joe_l_metatarsal,
Joe_l_metatarsal_2,
Joe_l_metatarsal_phalanx_1_pt,
Joe_l_metatarsal_phalanx_5_pt,
Joe_l_metatarsophalangeal_2,
Joe_l_neck_base_pt,
Joe_l_olecranon_pt,
Joe_l_psis_pt,
Joe_l_radial_styloid_pt,
Joe_l_radiale_pt,
Joe_l_radiocarpal,
Joe_l_rib10_pt,
Joe_l_scapula,
Joe_l_shoulder,
Joe_l_sphyrion_pt,
Joe_l_sternoclavicular,
Joe_l_talocrural,
Joe_l_talus,
Joe_l_tarsal_distal_phalanx_2,
Joe_l_tarsal_distal_phalanx_2_pt,
Joe_l_tarsal_proximal_phalanx_2,
Joe_l_tarsometatarsal_2,
Joe_l_thelion_pt,
Joe_l_thigh,
Joe_l_tragion_pt,
Joe_l_trochanterion_pt,
Joe_l_ulnar_styloid_pt,
Joe_l_upperarm,
Joe_l1,
Joe_l2,
Joe_l3,
Joe_l4,
Joe_l5,
Joe_navel_pt,
Joe_nuchale_pt,
Joe_pelvis,
Joe_r_acromioclavicular,
Joe_r_acromion_pt,
Joe_r_asis_pt,
Joe_r_axilla_distal_pt,
Joe_r_axilla_proximal_pt,
Joe_r_calcaneus_posterior_pt,
Joe_r_calf,
Joe_r_carpal,
Joe_r_carpal_distal_interphalangeal_2,
Joe_r_carpal_distal_interphalangeal_3,
Joe_r_carpal_distal_interphalangeal_4,
Joe_r_carpal_distal_interphalangeal_5,
Joe_r_carpal_distal_phalanx_1,
Joe_r_carpal_distal_phalanx_1_tip,
Joe_r_carpal_distal_phalanx_2,
Joe_r_carpal_distal_phalanx_2_tip,
Joe_r_carpal_distal_phalanx_3,
Joe_r_carpal_distal_phalanx_3_tip,
Joe_r_carpal_distal_phalanx_4,
Joe_r_carpal_distal_phalanx_4_tip,
Joe_r_carpal_distal_phalanx_5,
Joe_r_carpal_distal_phalanx_5_tip,
Joe_r_carpal_interphalangeal_1,
Joe_r_carpal_middle_phalanx_2,
Joe_r_carpal_middle_phalanx_3,
Joe_r_carpal_middle_phalanx_4,
Joe_r_carpal_middle_phalanx_5,
Joe_r_carpal_proximal_interphalangeal_2,
Joe_r_carpal_proximal_interphalangeal_3,
Joe_r_carpal_proximal_interphalangeal_4,
Joe_r_carpal_proximal_interphalangeal_5,
Joe_r_carpal_proximal_phalanx_1,
Joe_r_carpal_proximal_phalanx_2,
Joe_r_carpal_proximal_phalanx_3,
Joe_r_carpal_proximal_phalanx_4,
Joe_r_carpal_proximal_phalanx_5,
Joe_r_carpometacarpal_1,
Joe_r_carpometacarpal_2,
Joe_r_carpometacarpal_3,
Joe_r_carpometacarpal_4,
Joe_r_carpometacarpal_5,
Joe_r_clavicle,
Joe_r_clavicle_pt,
Joe_r_dactylion_pt,
Joe_r_elbow,
Joe_r_eyeball,
Joe_r_eyeball_joint,
Joe_r_femoral_lateral_epicondyle_pt,
Joe_r_femoral_medial_epicondyle_pt,
Joe_r_forearm,
Joe_r_gonion_pt,
Joe_r_hip,
Joe_r_humeral_lateral_epicondyle_pt,
Joe_r_humeral_medial_epicondyle_pt,
Joe_r_iliocristale_pt,
Joe_r_infraorbitale_pt,
Joe_r_knee,
Joe_r_knee_crease_pt,
Joe_r_lateral_malleolus_pt,
Joe_r_medial_malleolus_pt,
Joe_r_metacarpal_1,
Joe_r_metacarpal_2,
Joe_r_metacarpal_3,
Joe_r_metacarpal_4,
Joe_r_metacarpal_5,
Joe_r_metacarpal_phalanx_2_pt,
Joe_r_metacarpal_phalanx_5_pt,
Joe_r_metacarpophalangeal_1,
Joe_r_metacarpophalangeal_2,
Joe_r_metacarpophalangeal_3,
Joe_r_metacarpophalangeal_4,
Joe_r_metacarpophalangeal_5,
Joe_r_metatarsal_2,
Joe_r_metatarsal_phalanx_1_pt,
Joe_r_metatarsal_phalanx_5_pt,
Joe_r_metatarsophalangeal_2,
Joe_r_neck_base_pt,
Joe_r_olecranon_pt,
Joe_r_psis_pt,
Joe_r_radial_styloid_pt,
Joe_r_radiale_pt,
Joe_r_radiocarpal,
Joe_r_rib10_pt,
Joe_r_scapula,
Joe_r_shoulder,
Joe_r_sphyrion_pt,
Joe_r_sternoclavicular,
Joe_r_talocrural,
Joe_r_talus,
Joe_r_tarsal_distal_interphalangeal_2,
Joe_r_tarsal_distal_phalanx_2,
Joe_r_tarsal_distal_phalanx_2_pt,
Joe_r_tarsal_proximal_phalanx_2,
Joe_r_tarsometatarsal_2,
Joe_r_thelion_pt,
Joe_r_thigh,
Joe_r_tragion_pt,
Joe_r_trochanterion_pt,
Joe_r_ulnar_styloid_pt,
Joe_r_upperarm,
Joe_rib10_midspine_pt,
Joe_sacroiliac,
Joe_sacrum,
Joe_sellion_pt,
Joe_skull,
Joe_skull_vertex_tip,
Joe_skullbase,
Joe_substernale_pt,
Joe_supramenton_pt,
Joe_suprasternale_pt,
Joe_t1,
Joe_t10,
Joe_t11,
Joe_t12,
Joe_t2,
Joe_t3,
Joe_t4,
Joe_t5,
Joe_t6,
Joe_t7,
Joe_t8,
Joe_t9,
Joe_toPelvis,
Joe_vc1,
Joe_vc2,
Joe_vc3,
Joe_vc4,
Joe_vc5,
Joe_vc6,
Joe_vc7,
Joe_vl1,
Joe_vl2,
Joe_vl3,
Joe_vl4,
Joe_vl5,
Joe_vt1,
Joe_vt10,
Joe_vt11,
Joe_vt12,
Joe_vt2,
Joe_vt3,
Joe_vt4,
Joe_vt5,
Joe_vt6,
Joe_vt7,
Joe_vt8,
Joe_vt9,
Joe_waist_preferred_posterior_pt,
JoeISOHumanoid,
jointbox,
L_ANKLE_ANIMATOR,
L_ELBOW_ANIMATOR,
L_HIP_ANIMATOR,
L_KNEE_ANIMATOR,
L_metatarsal_ANIMATOR,
L_MIDTARSAL_ANIMATOR,
L_SHOULDER_ANIMATOR,
l_shoulderRoll,
L_subtalar_ANIMATOR,
L_WRIST_ANIMATOR,
Pitch,
r_acromioclavicularRelax,
r_acromioclavicularRoll,
R_ANKLE_ANIMATOR,
R_ELBOW_ANIMATOR,
r_elbowRelax,
r_fingers2Relax,
r_fingers3Relax,
r_ForeArmPitch,
r_handPitch,
R_HIP_ANIMATOR,
r_index0Relax,
r_index1Relax,
R_KNEE_ANIMATOR,
R_metatarsal_ANIMATOR,
r_middle0Relax,
r_middle1Relax,
R_MIDTARSAL_ANIMATOR,
r_pinky0Relax,
r_pinky1Relax,
r_ring0Relax,
r_ring1Relax,
R_SHOULDER_ANIMATOR,
r_shoulderRelax,
r_shoulderRoll,
r_sternoclavicularRelax,
r_sternoclavicularRoll,
R_subtalar_ANIMATOR,
r_thumb1Pitch,
r_thumb1Relax,
r_thumb2Pitch,
r_thumb2Relax,
r_thumb3Relax,
R_WRIST_ANIMATOR,
r_wristRelax,
r_wristRoll,
Roll,
SegmentLine,
sitebox,
SkinAppearance,
SkinMaterial,
SkinShape,
skinsphere,
SKULLBASE_ANIMATOR,
SpecHumanoid,
TheSkinCoord,
Thumbnail,
Time1,
Time2,
Time3,
vc6Yaw,
ViewpointGroup,
VisualizationShapes,
VL5_ANIMATOR,
Yaw,
zBlueSpiralBkg2
DEF nodes index:
boxCoords,
CoordinateAxes,
cordsysfloor,
EyeballsRotation,
HeadlightOnRevealsSkinTextureAndColors,
HUMANOIDROOT_ANIMATOR,
HUMANOIDROOT_POSITION_ANIMATOR,
Joe_c1,
Joe_c2,
Joe_c3,
Joe_c4,
Joe_c5,
Joe_c6,
Joe_c7,
Joe_cervicale_pt,
Joe_crotch_pt,
Joe_floormarker_pt,
Joe_Human,
Joe_humanoid_root,
Joe_l_acromioclavicular,
Joe_l_acromion_pt,
Joe_l_asis_pt,
Joe_l_axilla_distal_pt,
Joe_l_axilla_proximal_pt,
Joe_l_calcaneus_posterior_pt,
Joe_l_calf,
Joe_l_carpal,
Joe_l_carpal_distal_interphalangeal_2,
Joe_l_carpal_distal_interphalangeal_3,
Joe_l_carpal_distal_interphalangeal_4,
Joe_l_carpal_distal_interphalangeal_5,
Joe_l_carpal_distal_phalanx_1,
Joe_l_carpal_distal_phalanx_1_tip,
Joe_l_carpal_distal_phalanx_2,
Joe_l_carpal_distal_phalanx_2_tip,
Joe_l_carpal_distal_phalanx_3,
Joe_l_carpal_distal_phalanx_3_tip,
Joe_l_carpal_distal_phalanx_4,
Joe_l_carpal_distal_phalanx_4_tip,
Joe_l_carpal_distal_phalanx_5,
Joe_l_carpal_distal_phalanx_5_tip,
Joe_l_carpal_interphalangeal_1,
Joe_l_carpal_middle_phalanx_2,
Joe_l_carpal_middle_phalanx_3,
Joe_l_carpal_middle_phalanx_4,
Joe_l_carpal_middle_phalanx_5,
Joe_l_carpal_proximal_interphalangeal_2,
Joe_l_carpal_proximal_interphalangeal_3,
Joe_l_carpal_proximal_interphalangeal_4,
Joe_l_carpal_proximal_interphalangeal_5,
Joe_l_carpal_proximal_phalanx_1,
Joe_l_carpal_proximal_phalanx_2,
Joe_l_carpal_proximal_phalanx_3,
Joe_l_carpal_proximal_phalanx_4,
Joe_l_carpal_proximal_phalanx_5,
Joe_l_carpometacarpal_1,
Joe_l_carpometacarpal_2,
Joe_l_carpometacarpal_3,
Joe_l_carpometacarpal_4,
Joe_l_carpometacarpal_5,
Joe_l_clavicle,
Joe_l_clavicle_pt,
Joe_l_dactylion_pt,
Joe_l_elbow,
Joe_l_eyeball,
Joe_l_eyeball_joint,
Joe_l_femoral_lateral_epicondyle_pt,
Joe_l_femoral_medial_epicondyle_pt,
Joe_l_forearm,
Joe_l_gonion_pt,
Joe_l_hip,
Joe_l_humeral_lateral_epicondyle_pt,
Joe_l_humeral_medial_epicondyle_pt,
Joe_l_iliocristale_pt,
Joe_l_infraorbitale_pt,
Joe_l_knee,
Joe_l_knee_crease_pt,
Joe_l_lateral_malleolus_pt,
Joe_l_medial_malleolus_pt,
Joe_l_metacarpal_1,
Joe_l_metacarpal_2,
Joe_l_metacarpal_3,
Joe_l_metacarpal_4,
Joe_l_metacarpal_5,
Joe_l_metacarpal_phalanx_2_pt,
Joe_l_metacarpal_phalanx_5_pt,
Joe_l_metacarpophalangeal_1,
Joe_l_metacarpophalangeal_2,
Joe_l_metacarpophalangeal_3,
Joe_l_metacarpophalangeal_4,
Joe_l_metacarpophalangeal_5,
Joe_l_metatarsal,
Joe_l_metatarsal_2,
Joe_l_metatarsal_phalanx_1_pt,
Joe_l_metatarsal_phalanx_5_pt,
Joe_l_metatarsophalangeal_2,
Joe_l_neck_base_pt,
Joe_l_olecranon_pt,
Joe_l_psis_pt,
Joe_l_radial_styloid_pt,
Joe_l_radiale_pt,
Joe_l_radiocarpal,
Joe_l_rib10_pt,
Joe_l_scapula,
Joe_l_shoulder,
Joe_l_sphyrion_pt,
Joe_l_sternoclavicular,
Joe_l_talocrural,
Joe_l_talus,
Joe_l_tarsal_distal_phalanx_2,
Joe_l_tarsal_distal_phalanx_2_pt,
Joe_l_tarsal_proximal_phalanx_2,
Joe_l_tarsometatarsal_2,
Joe_l_thelion_pt,
Joe_l_thigh,
Joe_l_tragion_pt,
Joe_l_trochanterion_pt,
Joe_l_ulnar_styloid_pt,
Joe_l_upperarm,
Joe_l1,
Joe_l2,
Joe_l3,
Joe_l4,
Joe_l5,
Joe_navel_pt,
Joe_nuchale_pt,
Joe_pelvis,
Joe_r_acromioclavicular,
Joe_r_acromion_pt,
Joe_r_asis_pt,
Joe_r_axilla_distal_pt,
Joe_r_axilla_proximal_pt,
Joe_r_calcaneus_posterior_pt,
Joe_r_calf,
Joe_r_carpal,
Joe_r_carpal_distal_interphalangeal_2,
Joe_r_carpal_distal_interphalangeal_3,
Joe_r_carpal_distal_interphalangeal_4,
Joe_r_carpal_distal_interphalangeal_5,
Joe_r_carpal_distal_phalanx_1,
Joe_r_carpal_distal_phalanx_1_tip,
Joe_r_carpal_distal_phalanx_2,
Joe_r_carpal_distal_phalanx_2_tip,
Joe_r_carpal_distal_phalanx_3,
Joe_r_carpal_distal_phalanx_3_tip,
Joe_r_carpal_distal_phalanx_4,
Joe_r_carpal_distal_phalanx_4_tip,
Joe_r_carpal_distal_phalanx_5,
Joe_r_carpal_distal_phalanx_5_tip,
Joe_r_carpal_interphalangeal_1,
Joe_r_carpal_middle_phalanx_2,
Joe_r_carpal_middle_phalanx_3,
Joe_r_carpal_middle_phalanx_4,
Joe_r_carpal_middle_phalanx_5,
Joe_r_carpal_proximal_interphalangeal_2,
Joe_r_carpal_proximal_interphalangeal_3,
Joe_r_carpal_proximal_interphalangeal_4,
Joe_r_carpal_proximal_interphalangeal_5,
Joe_r_carpal_proximal_phalanx_1,
Joe_r_carpal_proximal_phalanx_2,
Joe_r_carpal_proximal_phalanx_3,
Joe_r_carpal_proximal_phalanx_4,
Joe_r_carpal_proximal_phalanx_5,
Joe_r_carpometacarpal_1,
Joe_r_carpometacarpal_2,
Joe_r_carpometacarpal_3,
Joe_r_carpometacarpal_4,
Joe_r_carpometacarpal_5,
Joe_r_clavicle,
Joe_r_clavicle_pt,
Joe_r_dactylion_pt,
Joe_r_elbow,
Joe_r_eyeball,
Joe_r_eyeball_joint,
Joe_r_femoral_lateral_epicondyle_pt,
Joe_r_femoral_medial_epicondyle_pt,
Joe_r_forearm,
Joe_r_gonion_pt,
Joe_r_hip,
Joe_r_humeral_lateral_epicondyle_pt,
Joe_r_humeral_medial_epicondyle_pt,
Joe_r_iliocristale_pt,
Joe_r_infraorbitale_pt,
Joe_r_knee,
Joe_r_knee_crease_pt,
Joe_r_lateral_malleolus_pt,
Joe_r_medial_malleolus_pt,
Joe_r_metacarpal_1,
Joe_r_metacarpal_2,
Joe_r_metacarpal_3,
Joe_r_metacarpal_4,
Joe_r_metacarpal_5,
Joe_r_metacarpal_phalanx_2_pt,
Joe_r_metacarpal_phalanx_5_pt,
Joe_r_metacarpophalangeal_1,
Joe_r_metacarpophalangeal_2,
Joe_r_metacarpophalangeal_3,
Joe_r_metacarpophalangeal_4,
Joe_r_metacarpophalangeal_5,
Joe_r_metatarsal_2,
Joe_r_metatarsal_phalanx_1_pt,
Joe_r_metatarsal_phalanx_5_pt,
Joe_r_metatarsophalangeal_2,
Joe_r_neck_base_pt,
Joe_r_olecranon_pt,
Joe_r_psis_pt,
Joe_r_radial_styloid_pt,
Joe_r_radiale_pt,
Joe_r_radiocarpal,
Joe_r_rib10_pt,
Joe_r_scapula,
Joe_r_shoulder,
Joe_r_sphyrion_pt,
Joe_r_sternoclavicular,
Joe_r_talocrural,
Joe_r_talus,
Joe_r_tarsal_distal_interphalangeal_2,
Joe_r_tarsal_distal_phalanx_2,
Joe_r_tarsal_distal_phalanx_2_pt,
Joe_r_tarsal_proximal_phalanx_2,
Joe_r_tarsometatarsal_2,
Joe_r_thelion_pt,
Joe_r_thigh,
Joe_r_tragion_pt,
Joe_r_trochanterion_pt,
Joe_r_ulnar_styloid_pt,
Joe_r_upperarm,
Joe_rib10_midspine_pt,
Joe_sacroiliac,
Joe_sacrum,
Joe_sellion_pt,
Joe_skull,
Joe_skull_vertex_tip,
Joe_skullbase,
Joe_substernale_pt,
Joe_supramenton_pt,
Joe_suprasternale_pt,
Joe_t1,
Joe_t10,
Joe_t11,
Joe_t12,
Joe_t2,
Joe_t3,
Joe_t4,
Joe_t5,
Joe_t6,
Joe_t7,
Joe_t8,
Joe_t9,
Joe_toPelvis,
Joe_vc1,
Joe_vc2,
Joe_vc3,
Joe_vc4,
Joe_vc5,
Joe_vc6,
Joe_vc7,
Joe_vl1,
Joe_vl2,
Joe_vl3,
Joe_vl4,
Joe_vl5,
Joe_vt1,
Joe_vt10,
Joe_vt11,
Joe_vt12,
Joe_vt2,
Joe_vt3,
Joe_vt4,
Joe_vt5,
Joe_vt6,
Joe_vt7,
Joe_vt8,
Joe_vt9,
Joe_waist_preferred_posterior_pt,
JoeISOHumanoid,
jointbox,
L_ANKLE_ANIMATOR,
L_ELBOW_ANIMATOR,
L_HIP_ANIMATOR,
L_KNEE_ANIMATOR,
L_metatarsal_ANIMATOR,
L_MIDTARSAL_ANIMATOR,
L_SHOULDER_ANIMATOR,
l_shoulderRoll,
L_subtalar_ANIMATOR,
L_WRIST_ANIMATOR,
Pitch,
r_acromioclavicularRelax,
r_acromioclavicularRoll,
R_ANKLE_ANIMATOR,
R_ELBOW_ANIMATOR,
r_elbowRelax,
r_fingers2Relax,
r_fingers3Relax,
r_ForeArmPitch,
r_handPitch,
R_HIP_ANIMATOR,
r_index0Relax,
r_index1Relax,
R_KNEE_ANIMATOR,
R_metatarsal_ANIMATOR,
r_middle0Relax,
r_middle1Relax,
R_MIDTARSAL_ANIMATOR,
r_pinky0Relax,
r_pinky1Relax,
r_ring0Relax,
r_ring1Relax,
R_SHOULDER_ANIMATOR,
r_shoulderRelax,
r_shoulderRoll,
r_sternoclavicularRelax,
r_sternoclavicularRoll,
R_subtalar_ANIMATOR,
r_thumb1Pitch,
r_thumb1Relax,
r_thumb2Pitch,
r_thumb2Relax,
r_thumb3Relax,
R_WRIST_ANIMATOR,
r_wristRelax,
r_wristRoll,
Roll,
SegmentLine,
sitebox,
SkinAppearance,
SkinMaterial,
SkinShape,
skinsphere,
SKULLBASE_ANIMATOR,
SpecHumanoid,
TheSkinCoord,
Thumbnail,
Time1,
Time2,
Time3,
vc6Yaw,
ViewpointGroup,
VisualizationShapes,
VL5_ANIMATOR,
Yaw,
zBlueSpiralBkg2
Index for Viewpoint nodes: Viewpoint_1, Viewpoint_2, Viewpoint_3, Viewpoint_4, Viewpoint_5, Viewpoint_6, Viewpoint_7, Viewpoint_8, Viewpoint_9, Viewpoint_10, Viewpoint_11
-->| 37 | <Scene> |
| 38 | <WorldInfo info='"By Joe for Joe" "HAnim V1 LOA3 Skeleton Joint centers and Site translations Adapted for approximatrion of ManGLoss Site Location Example and HANIM 200x Default Joint Centers, LOA3"' title='JoeSkeletonSkinSiteSaluteWalk.x3d'/> |
| 39 | <NavigationInfo DEF='HeadlightOnRevealsSkinTextureAndColors'/> |
| 40 | <Background groundAngle='1.57' groundColor='0 0.1 0 0 0.1 0' skyColor='0 0 0.1'/> |
| 41 | <Transform DEF='cordsysfloor' scale='0.175 0.175 0.175'> |
| 42 |
<Inline DEF='CoordinateAxes'
url=' "../../X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.x3d" "../../../Savage/Tools/Authoring/CoordinateAxes.x3d" "https://www.web3d.org/x3d/content/examples/X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.x3d" "../../X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.wrl" "../../../Savage/Tools/Authoring/CoordinateAxes.wrl" "https://www.web3d.org/x3d/content/examples/X3dForWebAuthors/Chapter03Grouping/CoordinateAxes.wrl" "https://www.web3d.org/x3d/content/examples/Savage/Tools/Authoring/CoordinateAxes.x3d" "https://www.web3d.org/x3d/content/examples/Savage/Tools/Authoring/CoordinateAxes.wrl" '/>
|
| 43 | </Transform> |
| 44 | <!-- Authoring hint: these axes are aligned within local coordinate system --> |
| 45 | <Group DEF='ViewpointGroup'> |
| 46 | <Viewpoint description='Front Up View' orientation='-1 -1 0 0.55' position='-1 2 2.5'/> |
| 47 | <Viewpoint description='From Left View' orientation='0.3 1 0 -1.57' position='-2.5 1.5 0'/> |
| 48 | <Viewpoint description='Front Mid View' position='0 0.5 1.25'/> |
| 49 | <Viewpoint description='Front Feet View' position='0 0 0.75'/> |
| 50 | <Viewpoint description='From Right View' orientation='0 1 0 1.57' position='1 1 0'/> |
| 51 | <Viewpoint centerOfRotation='0 1.65 0' description='Front Head View' position='0 1.65 0.75'/> |
| 52 | <Viewpoint description='Front Mid View' position='0 1 1.75'/> |
| 53 | <Viewpoint description='Rear View' orientation='0 1 0 3.14' position='0 1.5 -4'/> |
| 54 | <Viewpoint description='Top View' orientation='1 0 0 -1.57' position='0 4 0'/> |
| 55 | <Viewpoint description='Bottom View' orientation='1 0 0 1.57' position='0 -4 0'/> |
| 56 | <Viewpoint description='Right View' orientation='0 1 0 1.57' position='4 1.5 0'/> |
| 57 | </Group> |
| 58 | <Group DEF='VisualizationShapes' visible='false'> |
| 59 | <Transform scale='5 5 5' translation='0 2.1 0'> |
| 60 |
<!-- Shape
jointbox is a DEF node that has 88 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88 -->
<Shape DEF='jointbox'> |
| 61 | <Appearance> |
| 62 | <Material ambientIntensity='0.5' diffuseColor='0 0 0' shininess='1'/> |
| 63 | </Appearance> |
| 64 | <IndexedFaceSet creaseAngle='0.1' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 65 | <Color color='1 0 0 0 0 1 0 1 0 1 1 1 0 1 1 1 1 0'/> |
| 66 | |
| 67 | </IndexedFaceSet> |
| 68 | </Shape> |
| 69 | </Transform> |
| 70 | <Transform scale='0.1 0.1 0.1' translation='-0.2 0.773 -0.016'> |
| 71 |
<!-- Shape
sitebox is a DEF node that has 88 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88 -->
<Shape DEF='sitebox'> |
| 72 | <Appearance> |
| 73 | <Material ambientIntensity='1' diffuseColor='1 0 0' emissiveColor='1 0 0' shininess='0.7' specularColor='1 0 0'/> |
| 74 | </Appearance> |
| 75 | <IndexedFaceSet creaseAngle='0.1' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 76 | <Coordinate USE='boxCoords'/> |
| 77 | </IndexedFaceSet> |
| 78 | </Shape> |
| 79 | </Transform> |
| 80 | <Transform scale='0.1 0.1 0.1' translation='0 0.2 0'> |
| 81 | <Shape> |
| 82 |
<!-- Appearance
SegmentLine is a DEF node that has 90 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90 -->
<Appearance DEF='SegmentLine'> |
| 83 | <Material diffuseColor='0 1 0' emissiveColor='0 1 0' specularColor='0 1 0'/> |
| 84 | </Appearance> |
| 85 | <IndexedLineSet coordIndex='0 1 -1'> |
| 86 | <Coordinate point='0 0 0 0 0.0001 0'/> |
| 87 | </IndexedLineSet> |
| 88 | </Shape> |
| 89 | </Transform> |
| 90 | <Transform scale='0.1 0.1 0.1' translation='-0.2 0.773 -0.016'> |
| 91 |
<!-- Shape
skinsphere is a DEF node that has 103 USE nodes: USE_1, USE_2, USE_3, USE_4, USE_5, USE_6, USE_7, USE_8, USE_9, USE_10, USE_11, USE_12, USE_13, USE_14, USE_15, USE_16, USE_17, USE_18, USE_19, USE_20, USE_21, USE_22, USE_23, USE_24, USE_25, USE_26, USE_27, USE_28, USE_29, USE_30, USE_31, USE_32, USE_33, USE_34, USE_35, USE_36, USE_37, USE_38, USE_39, USE_40, USE_41, USE_42, USE_43, USE_44, USE_45, USE_46, USE_47, USE_48, USE_49, USE_50, USE_51, USE_52, USE_53, USE_54, USE_55, USE_56, USE_57, USE_58, USE_59, USE_60, USE_61, USE_62, USE_63, USE_64, USE_65, USE_66, USE_67, USE_68, USE_69, USE_70, USE_71, USE_72, USE_73, USE_74, USE_75, USE_76, USE_77, USE_78, USE_79, USE_80, USE_81, USE_82, USE_83, USE_84, USE_85, USE_86, USE_87, USE_88, USE_89, USE_90, USE_91, USE_92, USE_93, USE_94, USE_95, USE_96, USE_97, USE_98, USE_99, USE_100, USE_101, USE_102, USE_103 -->
<Shape DEF='skinsphere'> |
| 92 | <Appearance> |
| 93 | <Material ambientIntensity='0.5' diffuseColor='0 1 0' emissiveColor='0 1 0' shininess='1' specularColor='0 1 0'/> |
| 94 | </Appearance> |
| 95 | <Sphere radius='0.005'/> |
| 96 | </Shape> |
| 97 | </Transform> |
| 98 | </Group> |
| 99 | <Group DEF='SpecHumanoid'> |
| 100 | <Group DEF='JoeISOHumanoid'> |
| 101 | <HAnimHumanoid DEF='Joe_Human' loa='4' name='Human'> |
| 102 | <!-- original HAnimHumanoid info='"humanoidVersion=2.0"' --> |
| 103 | <!-- <LOD containerField='skin'> (Switch whichChoice='0' and LOD parents each already work in view3dscene) --> |
| 104 | <!-- </LOD> --> |
| 105 | <MetadataSet containerField='metadata' name='HAnimHumanoid.info' reference='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/ObjectInterfaces.html#Humanoid'> |
| 106 | <MetadataString name='humanoidVersion' value='"2.0"'/> |
| 107 | </MetadataSet> |
| 108 |
<!-- HAnimJoint
Joe_humanoid_root is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_humanoid_root node: [from HUMANOIDROOT_POSITION_ANIMATOR.value_changed to set_translation ] [from HUMANOIDROOT_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_humanoid_root' center='0 0.875 0' containerField='skeleton' name='humanoid_root'> |
| 109 |
<!-- HAnimSegment
Joe_sacrum is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_sacrum' name='sacrum'> |
| 110 | <Transform translation='0 0.875 0'> |
| 111 | <Shape USE='jointbox'/> |
| 112 | </Transform> |
| 113 | <Shape> |
| 114 | <Appearance USE='SegmentLine'/> |
| 115 | <IndexedLineSet coordIndex='0 1 -1'> |
| 116 | <Coordinate point='0 0.875 0 0 0.92 0'/> |
| 117 | </IndexedLineSet> |
| 118 | </Shape> |
| 119 | <Transform translation='0 0.92 0.08'> |
| 120 | <Shape USE='skinsphere'/> |
| 121 | </Transform> |
| 122 | <Transform translation='0 0.87 -0.022'> |
| 123 | <Shape USE='skinsphere'/> |
| 124 | </Transform> |
| 125 | </HAnimSegment> |
| 126 |
<!-- HAnimJoint
Joe_sacroiliac is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_sacroiliac' center='0 0.92 0' name='sacroiliac' skinCoordIndex='17 19 20 21 22 23 26 27 73 82 89 91 93' skinCoordWeight='1 1 1 1 1 1 1 1 1 1 0.35 0.35 1'> |
| 127 |
<!-- HAnimSegment
Joe_pelvis is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_pelvis' name='pelvis'> |
| 128 | <Transform translation='0 0.9149 0.0016'> |
| 129 | <Transform> |
| 130 | <Shape USE='jointbox'/> |
| 131 | </Transform> |
| 132 | </Transform> |
| 133 | <Shape> |
| 134 | <Appearance USE='SegmentLine'/> |
| 135 | <IndexedLineSet coordIndex='0 1 -1 0 2 -1 0 3 -1'> |
| 136 | <Coordinate point='0 0.92 0 0.0961 0.9124 0 -0.095 0.9171 0.0029 0 1.045 -0.095'/> |
| 137 | </IndexedLineSet> |
| 138 | </Shape> |
| 139 |
<!-- HAnimSite
Joe_l_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_iliocristale_pt' name='l_iliocristale_pt' translation='0.1425 1.065 0.0033'> |
| 140 | <Shape USE='sitebox'/> |
| 141 | </HAnimSite> |
| 142 |
<!-- HAnimSite
Joe_l_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_trochanterion_pt' name='l_trochanterion_pt' translation='0.15 0.9 -0.01'> |
| 143 | <Shape USE='sitebox'/> |
| 144 | </HAnimSite> |
| 145 |
<!-- HAnimSite
Joe_r_iliocristale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_iliocristale_pt' name='r_iliocristale_pt' translation='-0.1425 1.065 0.0033'> |
| 146 | <Shape USE='sitebox'/> |
| 147 | </HAnimSite> |
| 148 |
<!-- HAnimSite
Joe_r_trochanterion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_trochanterion_pt' name='r_trochanterion_pt' translation='-0.15 0.9 -0.01'> |
| 149 | <Shape USE='sitebox'/> |
| 150 | </HAnimSite> |
| 151 |
<!-- HAnimSite
Joe_l_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_asis_pt' name='l_asis_pt' translation='0.0935 1.03 0.075'> |
| 152 | <Shape USE='sitebox'/> |
| 153 | </HAnimSite> |
| 154 |
<!-- HAnimSite
Joe_r_asis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_asis_pt' name='r_asis_pt' translation='-0.0935 1.03 0.075'> |
| 155 | <Shape USE='sitebox'/> |
| 156 | </HAnimSite> |
| 157 |
<!-- HAnimSite
Joe_l_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_psis_pt' name='l_psis_pt' translation='0.0773 1.019 -0.12'> |
| 158 | <Shape USE='sitebox'/> |
| 159 | </HAnimSite> |
| 160 |
<!-- HAnimSite
Joe_r_psis_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_psis_pt' name='r_psis_pt' translation='-0.0773 1.019 -0.12'> |
| 161 | <Shape USE='sitebox'/> |
| 162 | </HAnimSite> |
| 163 |
<!-- HAnimSite
Joe_floormarker_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_floormarker_pt' name='floormarker_pt'> |
| 164 | <Transform scale='3 3 3'> |
| 165 | <Shape USE='sitebox'/> |
| 166 | </Transform> |
| 167 | </HAnimSite> |
| 168 |
<!-- HAnimSite
Joe_crotch_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_crotch_pt' name='crotch_pt' translation='0 0.87 -0.022'> |
| 169 | <Shape USE='sitebox'/> |
| 170 | </HAnimSite> |
| 171 | </HAnimSegment> |
| 172 |
<!-- HAnimJoint
Joe_l_hip is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_hip node: [from L_HIP_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_hip' center='0.1 0.92 0' name='l_hip' skinCoordIndex='89 90 94 95 96 97' skinCoordWeight='0.65 1 1 1 1 1'> |
| 173 |
<!-- HAnimSegment
Joe_l_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_thigh' name='l_thigh'> |
| 174 | <Transform translation='0.1 0.92 0'> |
| 175 | <Shape USE='jointbox'/> |
| 176 | </Transform> |
| 177 | <Shape> |
| 178 | <Appearance USE='SegmentLine'/> |
| 179 | <IndexedLineSet coordIndex='0 1 -1'> |
| 180 | <Coordinate point='0.1 0.92 0 0.115 0.466 0'/> |
| 181 | </IndexedLineSet> |
| 182 | </Shape> |
| 183 | <Transform translation='0.1 0.9 0.0775'> |
| 184 | <Shape USE='skinsphere'/> |
| 185 | </Transform> |
| 186 | <Transform translation='0.079 0.92 -0.14'> |
| 187 | <Shape USE='skinsphere'/> |
| 188 | </Transform> |
| 189 | <Transform translation='0.171 0.65 0'> |
| 190 | <Shape USE='skinsphere'/> |
| 191 | </Transform> |
| 192 | <Transform translation='0.02 0.65 0'> |
| 193 | <Shape USE='skinsphere'/> |
| 194 | </Transform> |
| 195 | <Transform translation='0.1 0.65 -0.08'> |
| 196 | <Shape USE='skinsphere'/> |
| 197 | </Transform> |
| 198 | <Transform translation='0.1 0.65 0.07'> |
| 199 | <Shape USE='skinsphere'/> |
| 200 | </Transform> |
| 201 |
<!-- HAnimSite
Joe_l_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_knee_crease_pt' name='l_knee_crease_pt' translation='0.115 0.466 -0.055'> |
| 202 | <Shape USE='sitebox'/> |
| 203 | </HAnimSite> |
| 204 |
<!-- HAnimSite
Joe_l_femoral_lateral_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_femoral_lateral_epicondyle_pt' name='l_femoral_lateral_epicondyle_pt' translation='0.17 0.466 0'> |
| 205 | <Shape USE='sitebox'/> |
| 206 | </HAnimSite> |
| 207 |
<!-- HAnimSite
Joe_l_femoral_medial_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_femoral_medial_epicondyle_pt' name='l_femoral_medial_epicondyle_pt' translation='0.05 0.466 0'> |
| 208 | <Shape USE='sitebox'/> |
| 209 | </HAnimSite> |
| 210 | </HAnimSegment> |
| 211 |
<!-- HAnimJoint
Joe_l_knee is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_knee node: [from L_KNEE_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_knee' center='0.115 0.466 0' name='l_knee' skinCoordIndex='334 335 336 337 338 339 340 341' skinCoordWeight='1 1 1 1 1 1 1 1'> |
| 212 |
<!-- HAnimSegment
Joe_l_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_calf' name='l_calf'> |
| 213 | <Transform translation='0.115 0.466 0'> |
| 214 | <Shape USE='jointbox'/> |
| 215 | </Transform> |
| 216 | <Shape> |
| 217 | <Appearance USE='SegmentLine'/> |
| 218 | <IndexedLineSet coordIndex='0 1 -1'> |
| 219 | <Coordinate point='0.115 0.466 0 0.1 0.069 0'/> |
| 220 | </IndexedLineSet> |
| 221 | </Shape> |
| 222 | <Transform translation='0.115 0.466 0.06'> |
| 223 | <Shape USE='skinsphere'/> |
| 224 | </Transform> |
| 225 | <Transform translation='0.115 0.466 -0.055'> |
| 226 | <Shape USE='skinsphere'/> |
| 227 | </Transform> |
| 228 | <Transform translation='0.17 0.466 0'> |
| 229 | <Shape USE='skinsphere'/> |
| 230 | </Transform> |
| 231 | <Transform translation='0.05 0.466 0'> |
| 232 | <Shape USE='skinsphere'/> |
| 233 | </Transform> |
| 234 | <Transform translation='0.17 0.3 0'> |
| 235 | <Shape USE='skinsphere'/> |
| 236 | </Transform> |
| 237 | <Transform translation='0.06 0.3 0'> |
| 238 | <Shape USE='skinsphere'/> |
| 239 | </Transform> |
| 240 | <Transform translation='0.1 0.3 -0.05'> |
| 241 | <Shape USE='skinsphere'/> |
| 242 | </Transform> |
| 243 | <Transform translation='0.1 0.3 0.05'> |
| 244 | <Shape USE='skinsphere'/> |
| 245 | </Transform> |
| 246 |
<!-- HAnimSite
Joe_l_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt' translation='0.15 0.07 0'> |
| 247 | <Shape USE='sitebox'/> |
| 248 | </HAnimSite> |
| 249 |
<!-- HAnimSite
Joe_l_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_medial_malleolus_pt' name='l_medial_malleolus_pt' translation='0.085 0.086 0.0125'> |
| 250 | <Shape USE='sitebox'/> |
| 251 | </HAnimSite> |
| 252 | </HAnimSegment> |
| 253 |
<!-- HAnimJoint
Joe_l_talocrural is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_talocrural node: [from L_ANKLE_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_talocrural' center='0.115 0.069 0' name='l_talocrural' skinCoordIndex='342 343 344 345' skinCoordWeight='1 1 1 1'> |
| 254 |
<!-- HAnimSegment
Joe_l_talus is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_talus' name='l_talus'> |
| 255 | <Transform translation='0.115 0.069 0'> |
| 256 | <Shape USE='jointbox'/> |
| 257 | </Transform> |
| 258 | <Shape> |
| 259 | <Appearance USE='SegmentLine'/> |
| 260 | <IndexedLineSet coordIndex='0 1 -1'> |
| 261 | <Coordinate point='0.1 0.069 0 0.115 0.031 0.03'/> |
| 262 | </IndexedLineSet> |
| 263 | </Shape> |
| 264 | <Transform translation='0.15 0.07 0'> |
| 265 | <Shape USE='skinsphere'/> |
| 266 | </Transform> |
| 267 | <Transform translation='0.085 0.086 0.0125'> |
| 268 | <Shape USE='skinsphere'/> |
| 269 | </Transform> |
| 270 | <Transform translation='0.115 0.069 -0.045'> |
| 271 | <Shape USE='skinsphere'/> |
| 272 | </Transform> |
| 273 | <Transform translation='0.117 0.0975 0.0615'> |
| 274 | <Shape USE='skinsphere'/> |
| 275 | </Transform> |
| 276 |
<!-- HAnimSite
Joe_l_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_sphyrion_pt' name='l_sphyrion_pt' translation='0.09 0.056 0.0125'> |
| 277 | <Shape USE='sitebox'/> |
| 278 | </HAnimSite> |
| 279 |
<!-- HAnimSite
Joe_l_calcaneus_posterior_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_calcaneus_posterior_pt' name='l_calcaneus_posterior_pt' translation='0.115 0.04 -0.055'> |
| 280 | <Shape USE='sitebox'/> |
| 281 | </HAnimSite> |
| 282 | </HAnimSegment> |
| 283 |
<!-- HAnimJoint
Joe_l_tarsometatarsal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_tarsometatarsal_2 node: [from L_subtalar_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_tarsometatarsal_2' center='0.115 0.031 0.03' name='l_tarsometatarsal_2' skinCoordIndex='346 347 348 71' skinCoordWeight='1 1 1 1'> |
| 284 |
<!-- HAnimSegment
Joe_l_metatarsal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metatarsal_2' name='l_metatarsal_2'> |
| 285 | <Transform translation='0.115 0.031 0.03'> |
| 286 | <Shape USE='jointbox'/> |
| 287 | </Transform> |
| 288 | <Shape> |
| 289 | <Appearance USE='SegmentLine'/> |
| 290 | <IndexedLineSet coordIndex='0 1 -1'> |
| 291 | <Coordinate point='0.115 0.031 0.03 0.115 0.037 0.09'/> |
| 292 | </IndexedLineSet> |
| 293 | </Shape> |
| 294 | <Transform translation='0.1375 0.006 -0.03'> |
| 295 | <Shape USE='skinsphere'/> |
| 296 | </Transform> |
| 297 | <Transform translation='0.095 0.006 -0.03'> |
| 298 | <Shape USE='skinsphere'/> |
| 299 | </Transform> |
| 300 | <Transform translation='0.115 0.015 -0.045'> |
| 301 | <Shape USE='skinsphere'/> |
| 302 | </Transform> |
| 303 | </HAnimSegment> |
| 304 |
<!-- HAnimJoint
Joe_l_metatarsophalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_metatarsophalangeal_2 node: [from L_MIDTARSAL_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_metatarsophalangeal_2' center='0.115 0.037 0.09' name='l_metatarsophalangeal_2' skinCoordIndex='349 350 351 352' skinCoordWeight='1 1 1 1'> |
| 305 |
<!-- HAnimSegment
Joe_l_tarsal_proximal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_tarsal_proximal_phalanx_2' name='l_tarsal_proximal_phalanx_2'> |
| 306 | <Transform translation='0.115 0.037 0.09'> |
| 307 | <Shape USE='jointbox'/> |
| 308 | </Transform> |
| 309 | <Shape> |
| 310 | <Appearance USE='SegmentLine'/> |
| 311 | <IndexedLineSet coordIndex='0 1 -1'> |
| 312 | <Coordinate point='0.115 0.037 0.09 0.115 0.02 0.122'/> |
| 313 | </IndexedLineSet> |
| 314 | </Shape> |
| 315 | <Transform translation='0.115 0.06 0.1'> |
| 316 | <Shape USE='skinsphere'/> |
| 317 | </Transform> |
| 318 | <Transform translation='0.115 0 0.07'> |
| 319 | <Shape USE='skinsphere'/> |
| 320 | </Transform> |
| 321 | <Transform translation='0.165 0 0.07'> |
| 322 | <Shape USE='skinsphere'/> |
| 323 | </Transform> |
| 324 | <Transform translation='0.095 0 0.07'> |
| 325 | <Shape USE='skinsphere'/> |
| 326 | </Transform> |
| 327 |
<!-- HAnimSite
Joe_l_metatarsal_phalanx_1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_metatarsal_phalanx_1_pt' name='l_metatarsal_phalanx_1_pt' translation='0.087 0.01 0.122'> |
| 328 | <Shape USE='sitebox'/> |
| 329 | </HAnimSite> |
| 330 | </HAnimSegment> |
| 331 |
<!-- HAnimJoint
Joe_l_metatarsal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_metatarsal node: [from L_metatarsal_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_metatarsal' center='0.115 0.02 0.122' name='l_metatarsal' skinCoordIndex='353 354 355 356 357 358 359 360 361' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 332 |
<!-- HAnimSegment
Joe_l_tarsal_distal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_tarsal_distal_phalanx_2' name='l_tarsal_distal_phalanx_2'> |
| 333 | <Transform translation='0.115 0.02 0.13'> |
| 334 | <Shape USE='jointbox'/> |
| 335 | </Transform> |
| 336 | <Shape> |
| 337 | <Appearance USE='SegmentLine'/> |
| 338 | <IndexedLineSet coordIndex='0 1 -1'> |
| 339 | <Coordinate point='0.115 0.02 0.122 0.132 0.013 0.19'/> |
| 340 | </IndexedLineSet> |
| 341 | </Shape> |
| 342 | <Transform translation='0.115 0.04 0.13'> |
| 343 | <Shape USE='skinsphere'/> |
| 344 | </Transform> |
| 345 | <Transform translation='0.125 0 0.12'> |
| 346 | <Shape USE='skinsphere'/> |
| 347 | </Transform> |
| 348 | <Transform translation='0.165 0 0.12'> |
| 349 | <Shape USE='skinsphere'/> |
| 350 | </Transform> |
| 351 | <Transform translation='0.087 0 0.122'> |
| 352 | <Shape USE='skinsphere'/> |
| 353 | </Transform> |
| 354 | <Transform translation='0.09 0.012 0.188'> |
| 355 | <Shape USE='skinsphere'/> |
| 356 | </Transform> |
| 357 | <Transform translation='0.11 0.011 0.19'> |
| 358 | <Shape USE='skinsphere'/> |
| 359 | </Transform> |
| 360 | <Transform translation='0.128 0.011 0.185'> |
| 361 | <Shape USE='skinsphere'/> |
| 362 | </Transform> |
| 363 | <Transform translation='0.142 0.011 0.178'> |
| 364 | <Shape USE='skinsphere'/> |
| 365 | </Transform> |
| 366 | <Transform translation='0.154 0.01 0.168'> |
| 367 | <Shape USE='skinsphere'/> |
| 368 | </Transform> |
| 369 |
<!-- HAnimSite
Joe_l_metatarsal_phalanx_5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_metatarsal_phalanx_5_pt' name='l_metatarsal_phalanx_5_pt' translation='0.165 0.01 0.12'> |
| 370 | <Shape USE='sitebox'/> |
| 371 | </HAnimSite> |
| 372 |
<!-- HAnimSite
Joe_l_tarsal_distal_phalanx_2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_tarsal_distal_phalanx_2_pt' name='l_tarsal_distal_phalanx_2_pt' translation='0.11 0.011 0.19'> |
| 373 | <Shape USE='sitebox'/> |
| 374 | </HAnimSite> |
| 375 | </HAnimSegment> |
| 376 | </HAnimJoint> |
| 377 | </HAnimJoint> |
| 378 | </HAnimJoint> |
| 379 | </HAnimJoint> |
| 380 | </HAnimJoint> |
| 381 | </HAnimJoint> |
| 382 |
<!-- HAnimJoint
Joe_r_hip is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_hip node: [from R_HIP_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_hip' center='-0.1 0.92 0' name='r_hip' skinCoordIndex='91 92 98 99 100 101' skinCoordWeight='0.65 1 1 1 1 1'> |
| 383 |
<!-- HAnimSegment
Joe_r_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_thigh' name='r_thigh'> |
| 384 | <Transform translation='-0.1 0.92 0'> |
| 385 | <Shape USE='jointbox'/> |
| 386 | </Transform> |
| 387 | <Shape> |
| 388 | <Appearance USE='SegmentLine'/> |
| 389 | <IndexedLineSet coordIndex='0 1 -1'> |
| 390 | <Coordinate point='-0.1 0.92 0 -0.1 0.4913 0'/> |
| 391 | </IndexedLineSet> |
| 392 | </Shape> |
| 393 | <Transform translation='-0.079 0.92 -0.14'> |
| 394 | <Shape USE='skinsphere'/> |
| 395 | </Transform> |
| 396 | <Transform translation='-0.1 0.9 0.075'> |
| 397 | <Shape USE='skinsphere'/> |
| 398 | </Transform> |
| 399 | <Transform translation='-0.171 0.65 0'> |
| 400 | <Shape USE='skinsphere'/> |
| 401 | </Transform> |
| 402 | <Transform translation='-0.02 0.65 0'> |
| 403 | <Shape USE='skinsphere'/> |
| 404 | </Transform> |
| 405 | <Transform translation='-0.1 0.65 -0.08'> |
| 406 | <Shape USE='skinsphere'/> |
| 407 | </Transform> |
| 408 | <Transform translation='-0.1 0.65 0.07'> |
| 409 | <Shape USE='skinsphere'/> |
| 410 | </Transform> |
| 411 |
<!-- HAnimSite
Joe_r_knee_crease_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_knee_crease_pt' name='r_knee_crease_pt' translation='-0.115 0.466 -0.055'> |
| 412 | <Shape USE='sitebox'/> |
| 413 | </HAnimSite> |
| 414 |
<!-- HAnimSite
Joe_r_femoral_lateral_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_femoral_lateral_epicondyle_pt' name='r_femoral_lateral_epicondyle_pt' translation='-0.17 0.466 0'> |
| 415 | <Shape USE='sitebox'/> |
| 416 | </HAnimSite> |
| 417 |
<!-- HAnimSite
Joe_r_femoral_medial_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_femoral_medial_epicondyle_pt' name='r_femoral_medial_epicondyle_pt' translation='-0.05 0.466 0'> |
| 418 | <Shape USE='sitebox'/> |
| 419 | </HAnimSite> |
| 420 | </HAnimSegment> |
| 421 |
<!-- HAnimJoint
Joe_r_knee is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_knee node: [from R_KNEE_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_knee' center='-0.05 0.466 0' name='r_knee' skinCoordIndex='362 363 364 365 366 367 368 369' skinCoordWeight='1 1 1 1 1 1 1 1'> |
| 422 |
<!-- HAnimSegment
Joe_r_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_calf' name='r_calf'> |
| 423 | <Transform translation='-0.1 0.4913 0'> |
| 424 | <Shape USE='jointbox'/> |
| 425 | </Transform> |
| 426 | <Shape> |
| 427 | <Appearance USE='SegmentLine'/> |
| 428 | <IndexedLineSet coordIndex='0 1 -1'> |
| 429 | <Coordinate point='-0.1 0.4913 0 -0.1 0.0712 0'/> |
| 430 | </IndexedLineSet> |
| 431 | </Shape> |
| 432 | <Transform translation='-0.115 0.466 0.06'> |
| 433 | <Shape USE='skinsphere'/> |
| 434 | </Transform> |
| 435 | <Transform translation='-0.115 0.466 -0.055'> |
| 436 | <Shape USE='skinsphere'/> |
| 437 | </Transform> |
| 438 | <Transform translation='-0.17 0.466 0'> |
| 439 | <Shape USE='skinsphere'/> |
| 440 | </Transform> |
| 441 | <Transform translation='-0.05 0.466 0'> |
| 442 | <Shape USE='skinsphere'/> |
| 443 | </Transform> |
| 444 | <Transform translation='-0.17 0.3 0'> |
| 445 | <Shape USE='skinsphere'/> |
| 446 | </Transform> |
| 447 | <Transform translation='-0.06 0.3 0'> |
| 448 | <Shape USE='skinsphere'/> |
| 449 | </Transform> |
| 450 | <Transform translation='-0.1 0.3 -0.05'> |
| 451 | <Shape USE='skinsphere'/> |
| 452 | </Transform> |
| 453 | <Transform translation='-0.1 0.3 0.05'> |
| 454 | <Shape USE='skinsphere'/> |
| 455 | </Transform> |
| 456 |
<!-- HAnimSite
Joe_r_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt' translation='-0.15 0.07 0'> |
| 457 | <Shape USE='sitebox'/> |
| 458 | </HAnimSite> |
| 459 |
<!-- HAnimSite
Joe_r_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_medial_malleolus_pt' name='r_medial_malleolus_pt' translation='-0.085 0.086 0.0125'> |
| 460 | <Shape USE='sitebox'/> |
| 461 | </HAnimSite> |
| 462 | </HAnimSegment> |
| 463 |
<!-- HAnimJoint
Joe_r_talocrural is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_talocrural node: [from R_ANKLE_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_talocrural' center='-0.115 0.069 0' name='r_talocrural' skinCoordIndex='370 371 372 373' skinCoordWeight='1 1 1 1'> |
| 464 |
<!-- HAnimSegment
Joe_r_talus is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_talus' name='r_talus'> |
| 465 | <Transform translation='-0.1 0.0712 0'> |
| 466 | <Shape USE='jointbox'/> |
| 467 | </Transform> |
| 468 | <Shape> |
| 469 | <Appearance USE='SegmentLine'/> |
| 470 | <IndexedLineSet coordIndex='0 1 -1'> |
| 471 | <Coordinate point='-0.1 0.0712 0 -0.1 0.015 -0.01'/> |
| 472 | </IndexedLineSet> |
| 473 | </Shape> |
| 474 | <Transform translation='-0.15 0.07 0'> |
| 475 | <Shape USE='skinsphere'/> |
| 476 | </Transform> |
| 477 | <Transform translation='-0.085 0.086 0.0125'> |
| 478 | <Shape USE='skinsphere'/> |
| 479 | </Transform> |
| 480 | <Transform translation='-0.115 0.069 -0.045'> |
| 481 | <Shape USE='skinsphere'/> |
| 482 | </Transform> |
| 483 | <Transform translation='-0.117 0.0975 0.0615'> |
| 484 | <Shape USE='skinsphere'/> |
| 485 | </Transform> |
| 486 |
<!-- HAnimSite
Joe_r_sphyrion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_sphyrion_pt' name='r_sphyrion_pt' translation='-0.09 0.056 0.0125'> |
| 487 | <Shape USE='sitebox'/> |
| 488 | </HAnimSite> |
| 489 |
<!-- HAnimSite
Joe_r_calcaneus_posterior_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_calcaneus_posterior_pt' name='r_calcaneus_posterior_pt' translation='-0.115 0.04 -0.055'> |
| 490 | <Shape USE='sitebox'/> |
| 491 | </HAnimSite> |
| 492 | </HAnimSegment> |
| 493 |
<!-- HAnimJoint
Joe_r_tarsometatarsal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_tarsometatarsal_2 node: [from R_subtalar_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_tarsometatarsal_2' center='-0.1 0.015 -0.01' name='r_tarsometatarsal_2' skinCoordIndex='374 375 376' skinCoordWeight='1 1 1'> |
| 494 |
<!-- HAnimSegment
Joe_r_metatarsal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metatarsal_2' name='r_metatarsal_2'> |
| 495 | <Transform translation='-0.1 0.015 -0.01'> |
| 496 | <Shape USE='jointbox'/> |
| 497 | </Transform> |
| 498 | <Shape> |
| 499 | <Appearance USE='SegmentLine'/> |
| 500 | <IndexedLineSet coordIndex='0 1 -1'> |
| 501 | <Coordinate point='-0.1 0.015 -0.01 -0.1 0.02 0.07'/> |
| 502 | </IndexedLineSet> |
| 503 | </Shape> |
| 504 | <Transform translation='-0.1375 0.006 -0.03'> |
| 505 | <Shape USE='skinsphere'/> |
| 506 | </Transform> |
| 507 | <Transform translation='-0.095 0.006 -0.03'> |
| 508 | <Shape USE='skinsphere'/> |
| 509 | </Transform> |
| 510 | <Transform translation='-0.095 0.006 -0.03'> |
| 511 | <Shape USE='skinsphere'/> |
| 512 | </Transform> |
| 513 | </HAnimSegment> |
| 514 |
<!-- HAnimJoint
Joe_r_metatarsophalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metatarsophalangeal_2 node: [from R_MIDTARSAL_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metatarsophalangeal_2' center='-0.115 0.037 0.09' name='r_metatarsophalangeal_2' skinCoordIndex='377 378 379 380' skinCoordWeight='1 1 1 1'> |
| 515 |
<!-- HAnimSegment
Joe_r_tarsal_proximal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_tarsal_proximal_phalanx_2' name='r_tarsal_proximal_phalanx_2'> |
| 516 | <Transform translation='-0.1 0.02 0.07'> |
| 517 | <Shape USE='jointbox'/> |
| 518 | </Transform> |
| 519 | <Shape> |
| 520 | <Appearance USE='SegmentLine'/> |
| 521 | <IndexedLineSet coordIndex='0 1 -1'> |
| 522 | <Coordinate point='-0.1 0.02 0.07 -0.1 0.01 0.14'/> |
| 523 | </IndexedLineSet> |
| 524 | </Shape> |
| 525 | <Transform translation='-0.115 0.06 0.1'> |
| 526 | <Shape USE='skinsphere'/> |
| 527 | </Transform> |
| 528 | <Transform translation='-0.115 0 0.07'> |
| 529 | <Shape USE='skinsphere'/> |
| 530 | </Transform> |
| 531 | <Transform translation='-0.165 0 0.07'> |
| 532 | <Shape USE='skinsphere'/> |
| 533 | </Transform> |
| 534 | <Transform translation='-0.165 0 0.07'> |
| 535 | <Shape USE='skinsphere'/> |
| 536 | </Transform> |
| 537 |
<!-- HAnimSite
Joe_r_metatarsal_phalanx_1_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_metatarsal_phalanx_1_pt' name='r_metatarsal_phalanx_1_pt' translation='-0.115 0.02 0.122'> |
| 538 | <Shape USE='sitebox'/> |
| 539 | </HAnimSite> |
| 540 | </HAnimSegment> |
| 541 |
<!-- HAnimJoint
Joe_r_tarsal_distal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_tarsal_distal_interphalangeal_2 node: [from R_metatarsal_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_tarsal_distal_interphalangeal_2' center='-0.1 0.01 0.14' name='r_tarsal_distal_interphalangeal_2' skinCoordIndex='381 382 383 384 385 386 387 388 389' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 542 |
<!-- HAnimSegment
Joe_r_tarsal_distal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_tarsal_distal_phalanx_2' name='r_tarsal_distal_phalanx_2'> |
| 543 | <Transform translation='-0.1086 0.01 0.14'> |
| 544 | <Shape USE='jointbox'/> |
| 545 | </Transform> |
| 546 | <Shape> |
| 547 | <Appearance USE='SegmentLine'/> |
| 548 | <IndexedLineSet coordIndex='0 1 -1'> |
| 549 | <Coordinate point='-0.1 0.01 0.14 -0.1043 0.0016 0.2'/> |
| 550 | </IndexedLineSet> |
| 551 | </Shape> |
| 552 | <Transform translation='-0.115 0.04 0.13'> |
| 553 | <Shape USE='skinsphere'/> |
| 554 | </Transform> |
| 555 | <Transform translation='-0.125 0 0.12'> |
| 556 | <Shape USE='skinsphere'/> |
| 557 | </Transform> |
| 558 | <Transform translation='-0.165 0 0.12'> |
| 559 | <Shape USE='skinsphere'/> |
| 560 | </Transform> |
| 561 | <Transform translation='-0.087 0 0.122'> |
| 562 | <Shape USE='skinsphere'/> |
| 563 | </Transform> |
| 564 | <Transform translation='-0.09 0.012 0.188'> |
| 565 | <Shape USE='skinsphere'/> |
| 566 | </Transform> |
| 567 | <Transform translation='-0.11 0.011 0.19'> |
| 568 | <Shape USE='skinsphere'/> |
| 569 | </Transform> |
| 570 | <Transform translation='-0.128 0.011 0.185'> |
| 571 | <Shape USE='skinsphere'/> |
| 572 | </Transform> |
| 573 | <Transform translation='-0.142 0.011 0.178'> |
| 574 | <Shape USE='skinsphere'/> |
| 575 | </Transform> |
| 576 | <Transform translation='-0.154 0.01 0.168'> |
| 577 | <Shape USE='skinsphere'/> |
| 578 | </Transform> |
| 579 |
<!-- HAnimSite
Joe_r_metatarsal_phalanx_5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_metatarsal_phalanx_5_pt' name='r_metatarsal_phalanx_5_pt' translation='-0.165 0.01 0.12'> |
| 580 | <Shape USE='sitebox'/> |
| 581 | </HAnimSite> |
| 582 |
<!-- HAnimSite
Joe_r_tarsal_distal_phalanx_2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_tarsal_distal_phalanx_2_pt' name='r_tarsal_distal_phalanx_2_pt' translation='-0.11 0.011 0.19'> |
| 583 | <Shape USE='sitebox'/> |
| 584 | </HAnimSite> |
| 585 | </HAnimSegment> |
| 586 | </HAnimJoint> |
| 587 | </HAnimJoint> |
| 588 | </HAnimJoint> |
| 589 | </HAnimJoint> |
| 590 | </HAnimJoint> |
| 591 | </HAnimJoint> |
| 592 | </HAnimJoint> |
| 593 |
<!-- HAnimJoint
Joe_vl5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_vl5 node: [from VL5_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_vl5' center='0 1.045 -0.095' name='vl5' skinCoordIndex='28 76' skinCoordWeight='1 1'> |
| 594 |
<!-- HAnimSegment
Joe_toPelvis is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_toPelvis' name='toPelvis'> |
| 595 | <Shape> |
| 596 | <Appearance USE='SegmentLine'/> |
| 597 | <IndexedLineSet coordIndex='0 1 -1'> |
| 598 | <Coordinate point='0 1.045 -0.095 0 0.9149 0.0016'/> |
| 599 | </IndexedLineSet> |
| 600 | </Shape> |
| 601 | </HAnimSegment> |
| 602 | |
| 603 | <Shape> |
| 604 | <Appearance USE='SegmentLine'/> |
| 605 | <IndexedLineSet coordIndex='0 1 -1'> |
| 606 | <Coordinate point='0 1.045 -0.095 0 1.068 -0.085'/> |
| 607 | </IndexedLineSet> |
| 608 | </Shape> |
| 609 |
<!-- HAnimSite
Joe_waist_preferred_posterior_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_waist_preferred_posterior_pt' name='waist_preferred_posterior_pt' translation='0 1.0915 -0.1091'> |
| 610 | <Shape USE='sitebox'/> |
| 611 | </HAnimSite> |
| 612 |
<!-- HAnimSite
Joe_navel_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_navel_pt' name='navel_pt' translation='0 1.0723 0.09'> |
| 613 | <Shape USE='sitebox'/> |
| 614 | </HAnimSite> |
| 615 | </HAnimSegment> |
| 616 | |
| 617 | |
| 618 | <Shape> |
| 619 | <Appearance USE='SegmentLine'/> |
| 620 | <IndexedLineSet coordIndex='0 1 -1'> |
| 621 | <Coordinate point='0 1.068 -0.085 0 1.092 -0.0725'/> |
| 622 | </IndexedLineSet> |
| 623 | </Shape> |
| 624 | <Transform translation='0 1.068 -0.085'> |
| 625 | <Shape USE='jointbox'/> |
| 626 | </Transform> |
| 627 | </HAnimSegment> |
| 628 | |
| 629 | |
| 630 | <Shape> |
| 631 | <Appearance USE='SegmentLine'/> |
| 632 | <IndexedLineSet coordIndex='0 1 -1'> |
| 633 | <Coordinate point='0 1.092 -0.0725 0 1.12 -0.065'/> |
| 634 | </IndexedLineSet> |
| 635 | </Shape> |
| 636 | <Transform translation='0 1.092 -0.0725'> |
| 637 | <Shape USE='jointbox'/> |
| 638 | </Transform> |
| 639 | </HAnimSegment> |
| 640 | |
| 641 | |
| 642 | <Shape> |
| 643 | <Appearance USE='SegmentLine'/> |
| 644 | <IndexedLineSet coordIndex='0 1 -1'> |
| 645 | <Coordinate point='0 1.12 -0.065 0 1.1459 -0.0625'/> |
| 646 | </IndexedLineSet> |
| 647 | </Shape> |
| 648 | <Transform translation='0 1.12 -0.065'> |
| 649 | <Shape USE='jointbox'/> |
| 650 | </Transform> |
| 651 | <Transform translation='-0.087 1.19 -0.09'> |
| 652 | <Shape USE='skinsphere'/> |
| 653 | </Transform> |
| 654 | <Transform translation='0.087 1.19 -0.09'> |
| 655 | <Shape USE='skinsphere'/> |
| 656 | </Transform> |
| 657 | <Transform translation='0.172 1.32 -0.03'> |
| 658 | <Shape USE='skinsphere'/> |
| 659 | </Transform> |
| 660 | <Transform translation='-0.172 1.32 -0.03'> |
| 661 | <Shape USE='skinsphere'/> |
| 662 | </Transform> |
| 663 | <Transform translation='0.15 1.23 -0.015'> |
| 664 | <Shape USE='skinsphere'/> |
| 665 | </Transform> |
| 666 | <Transform translation='-0.15 1.23 -0.015'> |
| 667 | <Shape USE='skinsphere'/> |
| 668 | </Transform> |
| 669 |
<!-- HAnimSite
Joe_r_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_rib10_pt' name='r_rib10_pt' translation='-0.087 1.19 0.09'> |
| 670 | <Shape USE='sitebox'/> |
| 671 | </HAnimSite> |
| 672 |
<!-- HAnimSite
Joe_l_rib10_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_rib10_pt' name='l_rib10_pt' translation='0.087 1.19 0.09'> |
| 673 | <Shape USE='sitebox'/> |
| 674 | </HAnimSite> |
| 675 |
<!-- HAnimSite
Joe_rib10_midspine_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_rib10_midspine_pt' name='rib10_midspine_pt' translation='0 1.1908 -0.1113'> |
| 676 | <Shape USE='sitebox'/> |
| 677 | </HAnimSite> |
| 678 | </HAnimSegment> |
| 679 | |
| 680 | |
| 681 | <Shape> |
| 682 | <Appearance USE='SegmentLine'/> |
| 683 | <IndexedLineSet coordIndex='0 1 -1'> |
| 684 | <Coordinate point='0 1.1459 -0.0625 0 1.179 -0.068'/> |
| 685 | </IndexedLineSet> |
| 686 | </Shape> |
| 687 | <Transform translation='0 1.1459 -0.0625'> |
| 688 | <Shape USE='jointbox'/> |
| 689 | </Transform> |
| 690 | </HAnimSegment> |
| 691 | |
| 692 | |
| 693 | <Shape> |
| 694 | <Appearance USE='SegmentLine'/> |
| 695 | <IndexedLineSet coordIndex='0 1 -1'> |
| 696 | <Coordinate point='0 1.179 -0.068 0 1.242 -0.09'/> |
| 697 | </IndexedLineSet> |
| 698 | </Shape> |
| 699 | <Transform translation='0 1.179 -0.068'> |
| 700 | <Shape USE='jointbox'/> |
| 701 | </Transform> |
| 702 | </HAnimSegment> |
| 703 | |
| 704 | |
| 705 | <Shape> |
| 706 | <Appearance USE='SegmentLine'/> |
| 707 | <IndexedLineSet coordIndex='0 1 -1'> |
| 708 | <Coordinate point='0 1.2145 -0.0755 0 1.242 -0.09'/> |
| 709 | </IndexedLineSet> |
| 710 | </Shape> |
| 711 | <Transform translation='0 1.2145 -0.0755'> |
| 712 | <Shape USE='jointbox'/> |
| 713 | </Transform> |
| 714 | </HAnimSegment> |
| 715 | |
| 716 | |
| 717 | <Shape> |
| 718 | <Appearance USE='SegmentLine'/> |
| 719 | <IndexedLineSet coordIndex='0 1 -1'> |
| 720 | <Coordinate point='0 1.242 -0.09 0 1.268 -0.1'/> |
| 721 | </IndexedLineSet> |
| 722 | </Shape> |
| 723 | <Transform translation='0 1.242 -0.09'> |
| 724 | <Shape USE='jointbox'/> |
| 725 | </Transform> |
| 726 |
<!-- HAnimSite
Joe_substernale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_substernale_pt' name='substernale_pt' translation='0 1.25 0.113'> |
| 727 | <Shape USE='sitebox'/> |
| 728 | </HAnimSite> |
| 729 | </HAnimSegment> |
| 730 | |
| 731 | |
| 732 | <Shape> |
| 733 | <Appearance USE='SegmentLine'/> |
| 734 | <IndexedLineSet coordIndex='0 1 -1'> |
| 735 | <Coordinate point='0 1.268 -0.1 0 1.294 -0.11'/> |
| 736 | </IndexedLineSet> |
| 737 | </Shape> |
| 738 | <Transform translation='0 1.268 -0.1'> |
| 739 | <Shape USE='jointbox'/> |
| 740 | </Transform> |
| 741 |
<!-- HAnimSite
Joe_r_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_thelion_pt' name='r_thelion_pt' translation='-0.1135 1.318 0.095'> |
| 742 | <Shape USE='sitebox'/> |
| 743 | </HAnimSite> |
| 744 |
<!-- HAnimSite
Joe_l_thelion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_thelion_pt' name='l_thelion_pt' translation='0.1135 1.318 0.095'> |
| 745 | <Shape USE='sitebox'/> |
| 746 | </HAnimSite> |
| 747 | </HAnimSegment> |
| 748 | |
| 749 | |
| 750 | <Shape> |
| 751 | <Appearance USE='SegmentLine'/> |
| 752 | <IndexedLineSet coordIndex='0 1 -1'> |
| 753 | <Coordinate point='0 1.294 -0.11 0 1.352 -0.12'/> |
| 754 | </IndexedLineSet> |
| 755 | </Shape> |
| 756 | <Transform translation='0 1.294 -0.11'> |
| 757 | <Shape USE='jointbox'/> |
| 758 | </Transform> |
| 759 | </HAnimSegment> |
| 760 | |
| 761 | |
| 762 | <Shape> |
| 763 | <Appearance USE='SegmentLine'/> |
| 764 | <IndexedLineSet coordIndex='0 1 -1'> |
| 765 | <Coordinate point='0 1.352 -0.12 0 1.381 -0.1235'/> |
| 766 | </IndexedLineSet> |
| 767 | </Shape> |
| 768 | <Transform translation='0 1.323 -0.1155'> |
| 769 | <Shape USE='jointbox'/> |
| 770 | </Transform> |
| 771 | </HAnimSegment> |
| 772 | |
| 773 | |
| 774 | <Shape> |
| 775 | <Appearance USE='SegmentLine'/> |
| 776 | <IndexedLineSet coordIndex='0 1 -1'> |
| 777 | <Coordinate point='0 1.381 -0.1235 0 1.41 -0.1235'/> |
| 778 | </IndexedLineSet> |
| 779 | </Shape> |
| 780 | <Transform translation='0 1.352 -0.12'> |
| 781 | <Shape USE='jointbox'/> |
| 782 | </Transform> |
| 783 | </HAnimSegment> |
| 784 | |
| 785 | |
| 786 | <Shape> |
| 787 | <Appearance USE='SegmentLine'/> |
| 788 | <IndexedLineSet coordIndex='0 1 -1'> |
| 789 | <Coordinate point='0 1.41 -0.1235 0 1.438 -0.12'/> |
| 790 | </IndexedLineSet> |
| 791 | </Shape> |
| 792 | <Transform translation='0 1.381 -0.1235'> |
| 793 | <Shape USE='jointbox'/> |
| 794 | </Transform> |
| 795 | </HAnimSegment> |
| 796 | |
| 797 | |
| 798 | <Shape> |
| 799 | <Appearance USE='SegmentLine'/> |
| 800 | <IndexedLineSet coordIndex='0 1 -1'> |
| 801 | <Coordinate point='0 1.41 -0.1235 0 1.438 -0.12'/> |
| 802 | </IndexedLineSet> |
| 803 | </Shape> |
| 804 | <Transform translation='0 1.41 -0.1235'> |
| 805 | <Shape USE='jointbox'/> |
| 806 | </Transform> |
| 807 | <Transform translation='0 1.41 -0.145'> |
| 808 | <Shape USE='skinsphere'/> |
| 809 | </Transform> |
| 810 | </HAnimSegment> |
| 811 | |
| 812 | |
| 813 | <Shape> |
| 814 | <Appearance USE='SegmentLine'/> |
| 815 | <IndexedLineSet coordIndex='0 1 -1'> |
| 816 | <Coordinate point='0 1.438 -0.12 0 1.468 -0.105'/> |
| 817 | </IndexedLineSet> |
| 818 | </Shape> |
| 819 | <Transform translation='0 1.438 -0.12'> |
| 820 | <Shape USE='jointbox'/> |
| 821 | </Transform> |
| 822 | </HAnimSegment> |
| 823 | |
| 824 | |
| 825 | <Shape> |
| 826 | <Appearance USE='SegmentLine'/> |
| 827 | <IndexedLineSet coordIndex='0 1 -1'> |
| 828 | <Coordinate point='0 1.468 -0.105 0 1.497 -0.09'/> |
| 829 | </IndexedLineSet> |
| 830 | </Shape> |
| 831 | <Transform translation='0 1.468 -0.105'> |
| 832 | <Shape USE='jointbox'/> |
| 833 | </Transform> |
| 834 | </HAnimSegment> |
| 835 | |
| 836 | |
| 837 | <Shape> |
| 838 | <Appearance USE='SegmentLine'/> |
| 839 | <IndexedLineSet coordIndex='0 1 -1'> |
| 840 | <Coordinate point='0 1.497 -0.09 0 1.525 -0.072'/> |
| 841 | </IndexedLineSet> |
| 842 | </Shape> |
| 843 | <Transform translation='0 1.497 -0.09'> |
| 844 | <Shape USE='jointbox'/> |
| 845 | </Transform> |
| 846 |
<!-- HAnimSite
Joe_suprasternale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_suprasternale_pt' name='suprasternale_pt' translation='0 1.44 0.03'> |
| 847 | <Shape USE='sitebox'/> |
| 848 | </HAnimSite> |
| 849 |
<!-- HAnimSite
Joe_cervicale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_cervicale_pt' name='cervicale_pt' translation='0 1.53 -0.084'> |
| 850 | <Shape USE='sitebox'/> |
| 851 | </HAnimSite> |
| 852 | </HAnimSegment> |
| 853 | |
| 854 | |
| 855 | <Shape> |
| 856 | <Appearance USE='SegmentLine'/> |
| 857 | <IndexedLineSet coordIndex='0 1 -1 0 2 -1 0 3 -1'> |
| 858 | <Coordinate point='0 1.525 -0.072 0.082 1.4488 -0.0353 -0.03 1.46 0.02 0 1.54 -0.05'/> |
| 859 | </IndexedLineSet> |
| 860 | </Shape> |
| 861 | <Transform translation='0 1.525 -0.072'> |
| 862 | <Shape USE='jointbox'/> |
| 863 | </Transform> |
| 864 |
<!-- HAnimSite
Joe_r_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_neck_base_pt' name='r_neck_base_pt' translation='-0.0646 1.5149 -0.0385'> |
| 865 | <Shape USE='sitebox'/> |
| 866 | </HAnimSite> |
| 867 |
<!-- HAnimSite
Joe_l_neck_base_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_neck_base_pt' name='l_neck_base_pt' translation='0.0646 1.5149 -0.0385'> |
| 868 | <Shape USE='sitebox'/> |
| 869 | </HAnimSite> |
| 870 | </HAnimSegment> |
| 871 |
<!-- HAnimJoint
Joe_vc6 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_vc6 node: [from vc6Yaw.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_vc6' center='0 1.54 -0.05' name='vc6'> |
| 872 | |
| 873 | <Shape> |
| 874 | <Appearance USE='SegmentLine'/> |
| 875 | <IndexedLineSet coordIndex='0 1 -1'> |
| 876 | <Coordinate point='0 1.54 -0.05 0 1.5675 -0.0256'/> |
| 877 | </IndexedLineSet> |
| 878 | </Shape> |
| 879 | <Transform translation='0 1.54 -0.05'> |
| 880 | <Shape USE='jointbox'/> |
| 881 | </Transform> |
| 882 | </HAnimSegment> |
| 883 | |
| 884 | |
| 885 | <Transform translation='0 1.552 -0.035'> |
| 886 | <Shape USE='jointbox'/> |
| 887 | </Transform> |
| 888 | <Shape> |
| 889 | <Appearance USE='SegmentLine'/> |
| 890 | <IndexedLineSet coordIndex='0 1 -1'> |
| 891 | <Coordinate point='0 1.5675 -0.0256 0 1.5823 -0.0185'/> |
| 892 | </IndexedLineSet> |
| 893 | </Shape> |
| 894 | </HAnimSegment> |
| 895 | |
| 896 | |
| 897 | <Shape> |
| 898 | <Appearance USE='SegmentLine'/> |
| 899 | <IndexedLineSet coordIndex='0 1 -1'> |
| 900 | <Coordinate point='0 1.5823 -0.0185 0 1.595 -0.0175'/> |
| 901 | </IndexedLineSet> |
| 902 | </Shape> |
| 903 | <Transform translation='0 1.5675 -0.0256'> |
| 904 | <Shape USE='jointbox'/> |
| 905 | </Transform> |
| 906 | </HAnimSegment> |
| 907 | |
| 908 | |
| 909 | <Shape> |
| 910 | <Appearance USE='SegmentLine'/> |
| 911 | <IndexedLineSet coordIndex='0 1 -1'> |
| 912 | <Coordinate point='0 1.595 -0.0175 0 1.61 -0.015'/> |
| 913 | </IndexedLineSet> |
| 914 | </Shape> |
| 915 | <Transform translation='0 1.5823 -0.0185'> |
| 916 | <Shape USE='jointbox'/> |
| 917 | </Transform> |
| 918 | </HAnimSegment> |
| 919 | |
| 920 | |
| 921 | <Shape> |
| 922 | <Appearance USE='SegmentLine'/> |
| 923 | <IndexedLineSet coordIndex='0 1 -1'> |
| 924 | <Coordinate point='0 1.61 -0.015 0 1.6144 -0.0034'/> |
| 925 | </IndexedLineSet> |
| 926 | </Shape> |
| 927 | <Transform translation='0 1.595 -0.0175'> |
| 928 | <Shape USE='jointbox'/> |
| 929 | </Transform> |
| 930 | </HAnimSegment> |
| 931 | |
| 932 | |
| 933 | <Shape> |
| 934 | <Appearance USE='SegmentLine'/> |
| 935 | <IndexedLineSet coordIndex='0 1 -1'> |
| 936 | <Coordinate point='0 1.6144 -0.0034 0 1.63 -0.01'/> |
| 937 | </IndexedLineSet> |
| 938 | </Shape> |
| 939 | <Transform translation='0 1.61 -0.015'> |
| 940 | <Shape USE='jointbox'/> |
| 941 | </Transform> |
| 942 | </HAnimSegment> |
| 943 |
<!-- HAnimJoint
Joe_skullbase is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_skullbase node: [from SKULLBASE_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_skullbase' center='0 1.63 -0.01' name='skullbase' skinCoordIndex='0 1 2 3 4 5 6 7 8 9' skinCoordWeight='1 1 1 1 1 1 1 1 1 1'> |
| 944 | |
| 945 | <Shape> |
| 946 | <Appearance USE='SegmentLine'/> |
| 947 | <IndexedLineSet coordIndex='0 1 -1 0 2 -1'> |
| 948 | <Coordinate point='0 1.63 -0.01 0.034 1.659 0.06 -0.034 1.655 0.065'/> |
| 949 | </IndexedLineSet> |
| 950 | </Shape> |
| 951 | <Transform translation='0 1.63 -0.01'> |
| 952 | <Shape USE='jointbox'/> |
| 953 | </Transform> |
| 954 |
<!-- HAnimSite
Joe_skull_vertex_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_skull_vertex_tip' name='skull_vertex_tip' translation='0 1.77 0'> |
| 955 | <Shape USE='sitebox'/> |
| 956 | </HAnimSite> |
| 957 |
<!-- HAnimSite
Joe_sellion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_sellion_pt' name='sellion_pt' translation='0 1.665 0.09'> |
| 958 | <Shape USE='sitebox'/> |
| 959 | </HAnimSite> |
| 960 |
<!-- HAnimSite
Joe_r_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_infraorbitale_pt' name='r_infraorbitale_pt' translation='-0.033 1.62 0.087'> |
| 961 | <Shape USE='sitebox'/> |
| 962 | </HAnimSite> |
| 963 |
<!-- HAnimSite
Joe_l_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_infraorbitale_pt' name='l_infraorbitale_pt' translation='0.033 1.62 0.087'> |
| 964 | <Shape USE='sitebox'/> |
| 965 | </HAnimSite> |
| 966 |
<!-- HAnimSite
Joe_supramenton_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_supramenton_pt' name='supramenton_pt' translation='0 1.55 0.097'> |
| 967 | <Shape USE='sitebox'/> |
| 968 | </HAnimSite> |
| 969 |
<!-- HAnimSite
Joe_r_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_tragion_pt' name='r_tragion_pt' translation='-0.077 1.64 -0.01'> |
| 970 | <Shape USE='sitebox'/> |
| 971 | </HAnimSite> |
| 972 |
<!-- HAnimSite
Joe_r_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_gonion_pt' name='r_gonion_pt' translation='-0.052 1.58 0.015'> |
| 973 | <Shape USE='sitebox'/> |
| 974 | </HAnimSite> |
| 975 |
<!-- HAnimSite
Joe_l_tragion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_tragion_pt' name='l_tragion_pt' translation='0.077 1.64 -0.01'> |
| 976 | <Shape USE='sitebox'/> |
| 977 | </HAnimSite> |
| 978 |
<!-- HAnimSite
Joe_l_gonion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_gonion_pt' name='l_gonion_pt' translation='0.0631 1.58 0.015'> |
| 979 | <Shape USE='sitebox'/> |
| 980 | </HAnimSite> |
| 981 |
<!-- HAnimSite
Joe_nuchale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_nuchale_pt' name='nuchale_pt' translation='0 1.625 -0.0925'> |
| 982 | <Shape USE='sitebox'/> |
| 983 | </HAnimSite> |
| 984 | </HAnimSegment> |
| 985 |
<!-- HAnimJoint
Joe_l_eyeball_joint is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_eyeball_joint node: [from EyeballsRotation.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_eyeball_joint' center='0.034 1.659 0.06' name='l_eyeball_joint'> |
| 986 |
<!-- HAnimSegment
Joe_l_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_eyeball' name='l_eyeball'> |
| 987 | <Shape> |
| 988 | <Appearance USE='SegmentLine'/> |
| 989 | <IndexedLineSet coordIndex='0 1 -1'> |
| 990 | <Coordinate point='0.034 1.655 0.065 -0.034 1.655 0.065'/> |
| 991 | </IndexedLineSet> |
| 992 | </Shape> |
| 993 | <Transform scale='1 1 1.4' translation='0.034 1.655 0.065'> |
| 994 | <Shape USE='jointbox'/> |
| 995 | </Transform> |
| 996 | </HAnimSegment> |
| 997 | </HAnimJoint> |
| 998 |
<!-- HAnimJoint
Joe_r_eyeball_joint is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_eyeball_joint node: [from EyeballsRotation.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_eyeball_joint' center='-0.034 1.659 0.06' name='r_eyeball_joint'> |
| 999 |
<!-- HAnimSegment
Joe_r_eyeball is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_eyeball' name='r_eyeball'> |
| 1000 | <Shape> |
| 1001 | <Appearance USE='SegmentLine'/> |
| 1002 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1003 | <Coordinate point='0.034 1.655 0.065 -0.034 1.655 0.065'/> |
| 1004 | </IndexedLineSet> |
| 1005 | </Shape> |
| 1006 | <Transform scale='1 1 1.4' translation='-0.034 1.655 0.065'> |
| 1007 | <Shape USE='jointbox'/> |
| 1008 | </Transform> |
| 1009 | </HAnimSegment> |
| 1010 | </HAnimJoint> |
| 1011 | </HAnimJoint> |
| 1012 | </HAnimJoint> |
| 1013 | </HAnimJoint> |
| 1014 | </HAnimJoint> |
| 1015 | </HAnimJoint> |
| 1016 | </HAnimJoint> |
| 1017 | </HAnimJoint> |
| 1018 | </HAnimJoint> |
| 1019 |
<!-- HAnimJoint
Joe_l_sternoclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_sternoclavicular' center='0.082 1.4488 -0.0353' name='l_sternoclavicular' skinCoordIndex='12' skinCoordWeight='1'> |
| 1020 |
<!-- HAnimSegment
Joe_l_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_clavicle' name='l_clavicle'> |
| 1021 | <Shape> |
| 1022 | <Appearance USE='SegmentLine'/> |
| 1023 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1024 | <Coordinate point='0.082 1.4488 -0.0353 0.0962 1.4269 -0.0424'/> |
| 1025 | </IndexedLineSet> |
| 1026 | </Shape> |
| 1027 | <Transform translation='0.082 1.4488 -0.0353'> |
| 1028 | <Shape USE='jointbox'/> |
| 1029 | </Transform> |
| 1030 |
<!-- HAnimSite
Joe_l_clavicle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_clavicle_pt' name='l_clavicle_pt' translation='0.03 1.46 0.035'> |
| 1031 | <Shape USE='sitebox'/> |
| 1032 | </HAnimSite> |
| 1033 | </HAnimSegment> |
| 1034 |
<!-- HAnimJoint
Joe_l_acromioclavicular is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_acromioclavicular' center='0.0962 1.4269 -0.0424' name='l_acromioclavicular' skinCoordIndex='79' skinCoordWeight='1'> |
| 1035 |
<!-- HAnimSegment
Joe_l_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_scapula' name='l_scapula'> |
| 1036 | <Shape> |
| 1037 | <Appearance USE='SegmentLine'/> |
| 1038 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1039 | <Coordinate point='0.0962 1.4269 -0.0424 0.2 1.44 -0.04'/> |
| 1040 | </IndexedLineSet> |
| 1041 | </Shape> |
| 1042 | <Transform translation='0.0962 1.4269 -0.0424'> |
| 1043 | <Shape USE='jointbox'/> |
| 1044 | </Transform> |
| 1045 | <Transform translation='0.11 1.427 -0.1375'> |
| 1046 | <Shape USE='skinsphere'/> |
| 1047 | </Transform> |
| 1048 |
<!-- HAnimSite
Joe_l_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_acromion_pt' name='l_acromion_pt' translation='0.175 1.4825 -0.06'> |
| 1049 | <Shape USE='sitebox'/> |
| 1050 | </HAnimSite> |
| 1051 |
<!-- HAnimSite
Joe_l_axilla_proximal_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_axilla_proximal_pt' name='l_axilla_proximal_pt' translation='0.17 1.38 0.007'> |
| 1052 | <Shape USE='sitebox'/> |
| 1053 | </HAnimSite> |
| 1054 |
<!-- HAnimSite
Joe_l_axilla_distal_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_axilla_distal_pt' name='l_axilla_distal_pt' translation='0.16 1.38 -0.125'> |
| 1055 | <Shape USE='sitebox'/> |
| 1056 | </HAnimSite> |
| 1057 | </HAnimSegment> |
| 1058 |
<!-- HAnimJoint
Joe_l_shoulder is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_shoulder node: [from l_shoulderRoll.value_changed to set_rotation ] [from L_SHOULDER_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_shoulder' center='0.2 1.44 -0.04' name='l_shoulder' skinCoordIndex='41 42 44 80 102 103 104 105' skinCoordWeight='1 1 1 1 1 1 1 1'> |
| 1059 |
<!-- HAnimSegment
Joe_l_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_upperarm' name='l_upperarm'> |
| 1060 | <Shape> |
| 1061 | <Appearance USE='SegmentLine'/> |
| 1062 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1063 | <Coordinate point='0.2029 1.44 -0.0387 0.2 1.1388 -0.04'/> |
| 1064 | </IndexedLineSet> |
| 1065 | </Shape> |
| 1066 | <Transform translation='0.2 1.44 -0.04'> |
| 1067 | <Shape USE='jointbox'/> |
| 1068 | </Transform> |
| 1069 | <Transform translation='0.235 1.42 -0.0625'> |
| 1070 | <Shape USE='skinsphere'/> |
| 1071 | </Transform> |
| 1072 | <Transform translation='0.25 1.27 -0.04'> |
| 1073 | <Shape USE='skinsphere'/> |
| 1074 | </Transform> |
| 1075 | <Transform translation='0.17 1.27 -0.04'> |
| 1076 | <Shape USE='skinsphere'/> |
| 1077 | </Transform> |
| 1078 | <Transform translation='0.2 1.27 -0.09'> |
| 1079 | <Shape USE='skinsphere'/> |
| 1080 | </Transform> |
| 1081 | <Transform translation='0.2 1.27 0.02'> |
| 1082 | <Shape USE='skinsphere'/> |
| 1083 | </Transform> |
| 1084 |
<!-- HAnimSite
Joe_l_humeral_medial_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_humeral_medial_epicondyle_pt' name='l_humeral_medial_epicondyle_pt' translation='0.165 1.1388 -0.04'> |
| 1085 | <Shape USE='sitebox'/> |
| 1086 | </HAnimSite> |
| 1087 |
<!-- HAnimSite
Joe_l_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_radiale_pt' name='l_radiale_pt' translation='0.23 1.133 -0.055'> |
| 1088 | <Shape USE='sitebox'/> |
| 1089 | </HAnimSite> |
| 1090 |
<!-- HAnimSite
Joe_l_humeral_lateral_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_humeral_lateral_epicondyle_pt' name='l_humeral_lateral_epicondyle_pt' translation='0.244 1.1388 -0.04'> |
| 1091 | <Shape USE='sitebox'/> |
| 1092 | </HAnimSite> |
| 1093 | </HAnimSegment> |
| 1094 |
<!-- HAnimJoint
Joe_l_elbow is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_elbow node: [from L_ELBOW_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_elbow' center='0.2 1.1388 -0.04' name='l_elbow' skinCoordIndex='45 46 47 109 110 111 112 113 115 116 117 118' skinCoordWeight='1 1 1 1 1 1 1 1 1 1 1 1 1 1 1'> |
| 1095 |
<!-- HAnimSegment
Joe_l_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_forearm' name='l_forearm'> |
| 1096 | <Shape> |
| 1097 | <Appearance USE='SegmentLine'/> |
| 1098 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1099 | <Coordinate point='0.2 1.1388 -0.04 0.2 0.87 -0.04'/> |
| 1100 | </IndexedLineSet> |
| 1101 | </Shape> |
| 1102 | <Transform translation='0.2 1.1388 -0.04'> |
| 1103 | <Shape USE='jointbox'/> |
| 1104 | </Transform> |
| 1105 | <Transform translation='0.2 1.1388 -0.013'> |
| 1106 | <Shape USE='skinsphere'/> |
| 1107 | </Transform> |
| 1108 | <Transform translation='0.225 1 -0.01'> |
| 1109 | <Shape USE='skinsphere'/> |
| 1110 | </Transform> |
| 1111 | <Transform translation='0.225 1 -0.07'> |
| 1112 | <Shape USE='skinsphere'/> |
| 1113 | </Transform> |
| 1114 | <Transform translation='0.185 1 -0.01'> |
| 1115 | <Shape USE='skinsphere'/> |
| 1116 | </Transform> |
| 1117 | <Transform translation='0.185 1 -0.07'> |
| 1118 | <Shape USE='skinsphere'/> |
| 1119 | </Transform> |
| 1120 |
<!-- HAnimSite
Joe_l_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_radial_styloid_pt' name='l_radial_styloid_pt' translation='0.1901 0.8645 -0.0415'> |
| 1121 | <Shape USE='sitebox'/> |
| 1122 | </HAnimSite> |
| 1123 |
<!-- HAnimSite
Joe_l_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_olecranon_pt' name='l_olecranon_pt' translation='0.2 1.1388 -0.08'> |
| 1124 | <Shape USE='sitebox'/> |
| 1125 | </HAnimSite> |
| 1126 | </HAnimSegment> |
| 1127 |
<!-- HAnimJoint
Joe_l_radiocarpal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_l_radiocarpal node: [from L_WRIST_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_l_radiocarpal' center='0.2 0.87 -0.04' name='l_radiocarpal' skinCoordIndex='119 120 121 122 123 124 125 126' skinCoordWeight='1 1 1 1 1 1 1 1'> |
| 1128 |
<!-- HAnimSegment
Joe_l_carpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal' name='l_carpal'> |
| 1129 | <Shape> |
| 1130 | <Appearance USE='SegmentLine'/> |
| 1131 | <IndexedLineSet coordIndex='0 1 -1 0 2 -1 0 3 -1 0 4 -1 0 5 -1'> |
| 1132 | <Coordinate point='0.2 0.87 -0.04 0.1924 0.8472 -0.0534 0.1983 0.8024 -0.028 0.1987 0.8029 -0.053 0.1956 0.8019 -0.0794 0.1925 0.8066 -0.1036'/> |
| 1133 | </IndexedLineSet> |
| 1134 | </Shape> |
| 1135 | <Transform translation='0.2 0.87 -0.04'> |
| 1136 | <Shape USE='jointbox'/> |
| 1137 | </Transform> |
| 1138 |
<!-- HAnimSite
Joe_l_metacarpal_phalanx_2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_metacarpal_phalanx_2_pt' name='l_metacarpal_phalanx_2_pt' translation='0.2009 0.8139 -0.0237'> |
| 1139 | <Shape USE='sitebox'/> |
| 1140 | </HAnimSite> |
| 1141 |
<!-- HAnimSite
Joe_l_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt' translation='0.2142 0.8529 -0.0648'> |
| 1142 | <Shape USE='sitebox'/> |
| 1143 | </HAnimSite> |
| 1144 |
<!-- HAnimSite
Joe_l_metacarpal_phalanx_5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_metacarpal_phalanx_5_pt' name='l_metacarpal_phalanx_5_pt' translation='0.1929 0.786 -0.1122'> |
| 1145 | <Shape USE='sitebox'/> |
| 1146 | </HAnimSite> |
| 1147 | </HAnimSegment> |
| 1148 |
<!-- HAnimJoint
Joe_l_carpometacarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpometacarpal_1' center='0.1924 0.8472 -0.0534' name='l_carpometacarpal_1' skinCoordIndex='127 128' skinCoordWeight='1 1'> |
| 1149 |
<!-- HAnimSegment
Joe_l_metacarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metacarpal_1' name='l_metacarpal_1'> |
| 1150 | <Shape> |
| 1151 | <Appearance USE='SegmentLine'/> |
| 1152 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1153 | <Coordinate point='0.1924 0.8472 -0.0534 0.1951 0.8226 0.0246'/> |
| 1154 | </IndexedLineSet> |
| 1155 | </Shape> |
| 1156 | <Transform translation='0.1924 0.8472 -0.0534'> |
| 1157 | <Shape USE='jointbox'/> |
| 1158 | </Transform> |
| 1159 | </HAnimSegment> |
| 1160 |
<!-- HAnimJoint
Joe_l_metacarpophalangeal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_metacarpophalangeal_1' center='0.1951 0.8226 0.0246' name='l_metacarpophalangeal_1' skinCoordIndex='138 139 140 141 142 143' skinCoordWeight='0.5 0.5 0.5 1 1 1'> |
| 1161 |
<!-- HAnimSegment
Joe_l_carpal_proximal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_proximal_phalanx_1' name='l_carpal_proximal_phalanx_1'> |
| 1162 | <Shape> |
| 1163 | <Appearance USE='SegmentLine'/> |
| 1164 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1165 | <Coordinate point='0.1951 0.8226 0.0246 0.1955 0.8159 0.0464'/> |
| 1166 | </IndexedLineSet> |
| 1167 | </Shape> |
| 1168 | <Transform translation='0.1951 0.8226 0.0246'> |
| 1169 | <Shape USE='jointbox'/> |
| 1170 | </Transform> |
| 1171 | </HAnimSegment> |
| 1172 |
<!-- HAnimJoint
Joe_l_carpal_interphalangeal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_interphalangeal_1' center='0.1955 0.8159 0.0464' name='l_carpal_interphalangeal_1' skinCoordIndex='144 145 146 147 148 149 150 151 152' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1173 |
<!-- HAnimSegment
Joe_l_carpal_distal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_distal_phalanx_1' name='l_carpal_distal_phalanx_1'> |
| 1174 | <Shape> |
| 1175 | <Appearance USE='SegmentLine'/> |
| 1176 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1177 | <Coordinate point='0.1955 0.8159 0.0464 0.1982 0.8061 0.0759'/> |
| 1178 | </IndexedLineSet> |
| 1179 | </Shape> |
| 1180 | <Transform translation='0.1955 0.8159 0.0464'> |
| 1181 | <Shape USE='jointbox'/> |
| 1182 | </Transform> |
| 1183 |
<!-- HAnimSite
Joe_l_carpal_distal_phalanx_1_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_carpal_distal_phalanx_1_tip' name='l_carpal_distal_phalanx_1_tip' translation='0.1982 0.8061 0.0759'> |
| 1184 | <Shape USE='sitebox'/> |
| 1185 | </HAnimSite> |
| 1186 | </HAnimSegment> |
| 1187 | </HAnimJoint> |
| 1188 | </HAnimJoint> |
| 1189 | </HAnimJoint> |
| 1190 |
<!-- HAnimJoint
Joe_l_carpometacarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpometacarpal_2' center='0.1983 0.8024 -0.028' name='l_carpometacarpal_2' skinCoordIndex='129 130' skinCoordWeight='1 1'> |
| 1191 |
<!-- HAnimSegment
Joe_l_metacarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metacarpal_2' name='l_metacarpal_2'> |
| 1192 | <Shape> |
| 1193 | <Appearance USE='SegmentLine'/> |
| 1194 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1195 | <Coordinate point='0.1983 0.8024 -0.028 0.1983 0.7815 -0.028'/> |
| 1196 | </IndexedLineSet> |
| 1197 | </Shape> |
| 1198 | <Transform translation='0.1983 0.8024 -0.028'> |
| 1199 | <Shape USE='jointbox'/> |
| 1200 | </Transform> |
| 1201 | </HAnimSegment> |
| 1202 |
<!-- HAnimJoint
Joe_l_metacarpophalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_metacarpophalangeal_2' center='0.1983 0.7815 -0.028' name='l_metacarpophalangeal_2' skinCoordIndex='138 139 140 153 154 155 163' skinCoordWeight='0.5 0.5 0.5 1 1 1 0.5'> |
| 1203 |
<!-- HAnimSegment
Joe_l_carpal_proximal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_proximal_phalanx_2' name='l_carpal_proximal_phalanx_2'> |
| 1204 | <Shape> |
| 1205 | <Appearance USE='SegmentLine'/> |
| 1206 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1207 | <Coordinate point='0.1983 0.7815 -0.028 0.2017 0.7363 -0.0248'/> |
| 1208 | </IndexedLineSet> |
| 1209 | </Shape> |
| 1210 | <Transform translation='0.1983 0.7815 -0.028'> |
| 1211 | <Shape USE='jointbox'/> |
| 1212 | </Transform> |
| 1213 | </HAnimSegment> |
| 1214 |
<!-- HAnimJoint
Joe_l_carpal_proximal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_proximal_interphalangeal_2' center='0.2017 0.7363 -0.0248' name='l_carpal_proximal_interphalangeal_2' skinCoordIndex='166 167 168 169' skinCoordWeight='1 1 1 1'> |
| 1215 |
<!-- HAnimSegment
Joe_l_carpal_middle_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_middle_phalanx_2' name='l_carpal_middle_phalanx_2'> |
| 1216 | <Shape> |
| 1217 | <Appearance USE='SegmentLine'/> |
| 1218 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1219 | <Coordinate point='0.2017 0.7363 -0.0248 0.2028 0.7139 -0.0236'/> |
| 1220 | </IndexedLineSet> |
| 1221 | </Shape> |
| 1222 | <Transform translation='0.2017 0.7363 -0.0248'> |
| 1223 | <Shape USE='jointbox'/> |
| 1224 | </Transform> |
| 1225 | </HAnimSegment> |
| 1226 |
<!-- HAnimJoint
Joe_l_carpal_distal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_distal_interphalangeal_2' center='0.2028 0.7139 -0.0236' name='l_carpal_distal_interphalangeal_2' skinCoordIndex='170 171 172 173 174 175 176 177 178' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1227 |
<!-- HAnimSegment
Joe_l_carpal_distal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_distal_phalanx_2' name='l_carpal_distal_phalanx_2'> |
| 1228 | <Shape> |
| 1229 | <Appearance USE='SegmentLine'/> |
| 1230 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1231 | <Coordinate point='0.2028 0.7139 -0.0236 0.2089 0.6858 -0.0245'/> |
| 1232 | </IndexedLineSet> |
| 1233 | </Shape> |
| 1234 | <Transform translation='0.2028 0.7139 -0.0236'> |
| 1235 | <Shape USE='jointbox'/> |
| 1236 | </Transform> |
| 1237 |
<!-- HAnimSite
Joe_l_carpal_distal_phalanx_2_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_carpal_distal_phalanx_2_tip' name='l_carpal_distal_phalanx_2_tip' translation='0.2089 0.6858 -0.0245'> |
| 1238 | <Shape USE='sitebox'/> |
| 1239 | </HAnimSite> |
| 1240 |
<!-- HAnimSite
Joe_l_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_dactylion_pt' name='l_dactylion_pt' translation='0.2056 0.6743 -0.0482'> |
| 1241 | <Shape USE='sitebox'/> |
| 1242 | </HAnimSite> |
| 1243 | </HAnimSegment> |
| 1244 | </HAnimJoint> |
| 1245 | </HAnimJoint> |
| 1246 | </HAnimJoint> |
| 1247 | </HAnimJoint> |
| 1248 |
<!-- HAnimJoint
Joe_l_carpometacarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpometacarpal_3' center='0.1987 0.8029 -0.053' name='l_carpometacarpal_3' skinCoordIndex='131 132' skinCoordWeight='1 1'> |
| 1249 |
<!-- HAnimSegment
Joe_l_metacarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metacarpal_3' name='l_metacarpal_3'> |
| 1250 | <Shape> |
| 1251 | <Appearance USE='SegmentLine'/> |
| 1252 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1253 | <Coordinate point='0.1987 0.8029 -0.053 0.1987 0.7818 -0.053'/> |
| 1254 | </IndexedLineSet> |
| 1255 | </Shape> |
| 1256 | <Transform translation='0.1987 0.8029 -0.053'> |
| 1257 | <Shape USE='jointbox'/> |
| 1258 | </Transform> |
| 1259 | </HAnimSegment> |
| 1260 |
<!-- HAnimJoint
Joe_l_metacarpophalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_metacarpophalangeal_3' center='0.1987 0.7818 -0.053' name='l_metacarpophalangeal_3' skinCoordIndex='156 157 163 164' skinCoordWeight='1 1 0.5 0.5'> |
| 1261 |
<!-- HAnimSegment
Joe_l_carpal_proximal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_proximal_phalanx_3' name='l_carpal_proximal_phalanx_3'> |
| 1262 | <Shape> |
| 1263 | <Appearance USE='SegmentLine'/> |
| 1264 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1265 | <Coordinate point='0.1987 0.7818 -0.053 0.2013 0.7273 -0.0503'/> |
| 1266 | </IndexedLineSet> |
| 1267 | </Shape> |
| 1268 | <Transform translation='0.1987 0.7818 -0.053'> |
| 1269 | <Shape USE='jointbox'/> |
| 1270 | </Transform> |
| 1271 | </HAnimSegment> |
| 1272 |
<!-- HAnimJoint
Joe_l_carpal_proximal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_proximal_interphalangeal_3' center='0.2013 0.7273 -0.0503' name='l_carpal_proximal_interphalangeal_3' skinCoordIndex='179 180 181 182' skinCoordWeight='1 1 1 1'> |
| 1273 |
<!-- HAnimSegment
Joe_l_carpal_middle_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_middle_phalanx_3' name='l_carpal_middle_phalanx_3'> |
| 1274 | <Shape> |
| 1275 | <Appearance USE='SegmentLine'/> |
| 1276 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1277 | <Coordinate point='0.2013 0.7273 -0.0503 0.2026 0.7011 -0.0494'/> |
| 1278 | </IndexedLineSet> |
| 1279 | </Shape> |
| 1280 | <Transform translation='0.2013 0.7273 -0.0503'> |
| 1281 | <Shape USE='jointbox'/> |
| 1282 | </Transform> |
| 1283 | </HAnimSegment> |
| 1284 |
<!-- HAnimJoint
Joe_l_carpal_distal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_distal_interphalangeal_3' center='0.2026 0.7011 -0.0494' name='l_carpal_distal_interphalangeal_3' skinCoordIndex='183 184 185 186 187 188 189 190 191' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1285 |
<!-- HAnimSegment
Joe_l_carpal_distal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_distal_phalanx_3' name='l_carpal_distal_phalanx_3'> |
| 1286 | <Shape> |
| 1287 | <Appearance USE='SegmentLine'/> |
| 1288 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1289 | <Coordinate point='0.2026 0.7011 -0.0494 0.208 0.6731 -0.0491'/> |
| 1290 | </IndexedLineSet> |
| 1291 | </Shape> |
| 1292 |
<!-- HAnimSite
Joe_l_carpal_distal_phalanx_3_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_carpal_distal_phalanx_3_tip' name='l_carpal_distal_phalanx_3_tip' translation='0.208 0.6731 -0.0491'> |
| 1293 | <Shape USE='sitebox'/> |
| 1294 | </HAnimSite> |
| 1295 | <Transform translation='0.2026 0.7011 -0.0494'> |
| 1296 | <Shape USE='jointbox'/> |
| 1297 | </Transform> |
| 1298 | </HAnimSegment> |
| 1299 | </HAnimJoint> |
| 1300 | </HAnimJoint> |
| 1301 | </HAnimJoint> |
| 1302 | </HAnimJoint> |
| 1303 |
<!-- HAnimJoint
Joe_l_carpometacarpal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpometacarpal_4' center='0.1956 0.8019 -0.0794' name='l_carpometacarpal_4' skinCoordIndex='133 134' skinCoordWeight='1 1'> |
| 1304 |
<!-- HAnimSegment
Joe_l_metacarpal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metacarpal_4' name='l_metacarpal_4'> |
| 1305 | <Shape> |
| 1306 | <Appearance USE='SegmentLine'/> |
| 1307 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1308 | <Coordinate point='0.1956 0.8019 -0.0794 0.1956 0.7815 -0.0794'/> |
| 1309 | </IndexedLineSet> |
| 1310 | </Shape> |
| 1311 | <Transform translation='0.1956 0.8019 -0.0794'> |
| 1312 | <Shape USE='jointbox'/> |
| 1313 | </Transform> |
| 1314 | </HAnimSegment> |
| 1315 |
<!-- HAnimJoint
Joe_l_metacarpophalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_metacarpophalangeal_4' center='0.1956 0.7815 -0.0794' name='l_metacarpophalangeal_4' skinCoordIndex='158 159 164 165' skinCoordWeight='1 1 0.5 0.5'> |
| 1316 |
<!-- HAnimSegment
Joe_l_carpal_proximal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_proximal_phalanx_4' name='l_carpal_proximal_phalanx_4'> |
| 1317 | <Shape> |
| 1318 | <Appearance USE='SegmentLine'/> |
| 1319 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1320 | <Coordinate point='0.1956 0.7815 -0.0794 0.1973 0.7287 -0.0777'/> |
| 1321 | </IndexedLineSet> |
| 1322 | </Shape> |
| 1323 | <Transform translation='0.1956 0.7815 -0.0794'> |
| 1324 | <Shape USE='jointbox'/> |
| 1325 | </Transform> |
| 1326 | </HAnimSegment> |
| 1327 |
<!-- HAnimJoint
Joe_l_carpal_proximal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_proximal_interphalangeal_4' center='0.1973 0.7287 -0.0777' name='l_carpal_proximal_interphalangeal_4' skinCoordIndex='192 193 194 195' skinCoordWeight='1 1 1 1'> |
| 1328 |
<!-- HAnimSegment
Joe_l_carpal_middle_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_middle_phalanx_4' name='l_carpal_middle_phalanx_4'> |
| 1329 | <Shape> |
| 1330 | <Appearance USE='SegmentLine'/> |
| 1331 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1332 | <Coordinate point='0.1973 0.7287 -0.0777 0.1983 0.7045 -0.0767'/> |
| 1333 | </IndexedLineSet> |
| 1334 | </Shape> |
| 1335 | <Transform translation='0.1973 0.7287 -0.0777'> |
| 1336 | <Shape USE='jointbox'/> |
| 1337 | </Transform> |
| 1338 | </HAnimSegment> |
| 1339 |
<!-- HAnimJoint
Joe_l_carpal_distal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_distal_interphalangeal_4' center='0.1983 0.7045 -0.0767' name='l_carpal_distal_interphalangeal_4' skinCoordIndex='196 197 198 199 200 201 202 203 204' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1340 |
<!-- HAnimSegment
Joe_l_carpal_distal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_distal_phalanx_4' name='l_carpal_distal_phalanx_4'> |
| 1341 | <Shape> |
| 1342 | <Appearance USE='SegmentLine'/> |
| 1343 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1344 | <Coordinate point='0.1983 0.7045 -0.0767 0.2035 0.675 -0.0756'/> |
| 1345 | </IndexedLineSet> |
| 1346 | </Shape> |
| 1347 | <Transform translation='0.1983 0.7045 -0.0767'> |
| 1348 | <Shape USE='jointbox'/> |
| 1349 | </Transform> |
| 1350 |
<!-- HAnimSite
Joe_l_carpal_distal_phalanx_4_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_carpal_distal_phalanx_4_tip' name='l_carpal_distal_phalanx_4_tip' translation='0.2035 0.675 -0.0756'> |
| 1351 | <Shape USE='sitebox'/> |
| 1352 | </HAnimSite> |
| 1353 | </HAnimSegment> |
| 1354 | </HAnimJoint> |
| 1355 | </HAnimJoint> |
| 1356 | </HAnimJoint> |
| 1357 | </HAnimJoint> |
| 1358 |
<!-- HAnimJoint
Joe_l_carpometacarpal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpometacarpal_5' center='0.1925 0.8066 -0.1036' name='l_carpometacarpal_5' skinCoordIndex='135 136 137 165' skinCoordWeight='1 1 1 0.5'> |
| 1359 |
<!-- HAnimSegment
Joe_l_metacarpal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_metacarpal_5' name='l_metacarpal_5'> |
| 1360 | <Shape> |
| 1361 | <Appearance USE='SegmentLine'/> |
| 1362 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1363 | <Coordinate point='0.1925 0.8066 -0.1036 0.1925 0.7866 -0.1036'/> |
| 1364 | </IndexedLineSet> |
| 1365 | </Shape> |
| 1366 | <Transform translation='0.1925 0.8066 -0.1036'> |
| 1367 | <Shape USE='jointbox'/> |
| 1368 | </Transform> |
| 1369 | </HAnimSegment> |
| 1370 |
<!-- HAnimJoint
Joe_l_metacarpophalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_metacarpophalangeal_5' center='0.1925 0.7866 -0.1036' name='l_metacarpophalangeal_5' skinCoordIndex='160 161 162' skinCoordWeight='1 1 1'> |
| 1371 |
<!-- HAnimSegment
Joe_l_carpal_proximal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_proximal_phalanx_5' name='l_carpal_proximal_phalanx_5'> |
| 1372 | <Shape> |
| 1373 | <Appearance USE='SegmentLine'/> |
| 1374 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1375 | <Coordinate point='0.1925 0.7866 -0.1036 0.1938 0.7452 -0.1024'/> |
| 1376 | </IndexedLineSet> |
| 1377 | </Shape> |
| 1378 | <Transform translation='0.1925 0.7866 -0.1036'> |
| 1379 | <Shape USE='jointbox'/> |
| 1380 | </Transform> |
| 1381 | </HAnimSegment> |
| 1382 |
<!-- HAnimJoint
Joe_l_carpal_proximal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_proximal_interphalangeal_5' center='0.1938 0.7452 -0.1024' name='l_carpal_proximal_interphalangeal_5' skinCoordIndex='205 206 207 208' skinCoordWeight='1 1 1 1'> |
| 1383 |
<!-- HAnimSegment
Joe_l_carpal_middle_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_middle_phalanx_5' name='l_carpal_middle_phalanx_5'> |
| 1384 | <Transform translation='0.1938 0.7452 -0.1024'> |
| 1385 | <Shape USE='jointbox'/> |
| 1386 | </Transform> |
| 1387 | <Shape> |
| 1388 | <Appearance USE='SegmentLine'/> |
| 1389 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1390 | <Coordinate point='0.1938 0.7452 -0.1024 0.1948 0.7277 -0.1017'/> |
| 1391 | </IndexedLineSet> |
| 1392 | </Shape> |
| 1393 | </HAnimSegment> |
| 1394 |
<!-- HAnimJoint
Joe_l_carpal_distal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='Joe_l_carpal_distal_interphalangeal_5' center='0.1948 0.7277 -0.1017' name='l_carpal_distal_interphalangeal_5' skinCoordIndex='209 210 211 212 213 214 215 216 217' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1395 |
<!-- HAnimSegment
Joe_l_carpal_distal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_l_carpal_distal_phalanx_5' name='l_carpal_distal_phalanx_5'> |
| 1396 | <Shape> |
| 1397 | <Appearance USE='SegmentLine'/> |
| 1398 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1399 | <Coordinate point='0.1948 0.7277 -0.1017 0.2014 0.7009 -0.1012'/> |
| 1400 | </IndexedLineSet> |
| 1401 | </Shape> |
| 1402 | <Transform translation='0.1948 0.7277 -0.1017'> |
| 1403 | <Shape USE='jointbox'/> |
| 1404 | </Transform> |
| 1405 |
<!-- HAnimSite
Joe_l_carpal_distal_phalanx_5_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_l_carpal_distal_phalanx_5_tip' name='l_carpal_distal_phalanx_5_tip' translation='0.2014 0.7009 -0.1012'> |
| 1406 | <Shape USE='sitebox'/> |
| 1407 | </HAnimSite> |
| 1408 | </HAnimSegment> |
| 1409 | </HAnimJoint> |
| 1410 | </HAnimJoint> |
| 1411 | </HAnimJoint> |
| 1412 | </HAnimJoint> |
| 1413 | </HAnimJoint> |
| 1414 | </HAnimJoint> |
| 1415 | </HAnimJoint> |
| 1416 | </HAnimJoint> |
| 1417 | </HAnimJoint> |
| 1418 |
<!-- HAnimJoint
Joe_r_sternoclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_sternoclavicular node: [from r_sternoclavicularRelax.value_changed to set_rotation ] [from r_sternoclavicularRoll.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_sternoclavicular' center='-0.03 1.46 0' name='r_sternoclavicular' skinCoordIndex='10' skinCoordWeight='1'> |
| 1419 |
<!-- HAnimSegment
Joe_r_clavicle is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_clavicle' name='r_clavicle'> |
| 1420 | <Shape> |
| 1421 | <Appearance USE='SegmentLine'/> |
| 1422 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1423 | <Coordinate point='-0.03 1.46 0.02 -0.09 1.41 -0.09'/> |
| 1424 | </IndexedLineSet> |
| 1425 | </Shape> |
| 1426 | <Transform translation='-0.03 1.46 0.02'> |
| 1427 | <Shape USE='jointbox'/> |
| 1428 | </Transform> |
| 1429 |
<!-- HAnimSite
Joe_r_clavicle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_clavicle_pt' name='r_clavicle_pt' translation='-0.03 1.46 0.035'> |
| 1430 | <Shape USE='sitebox'/> |
| 1431 | </HAnimSite> |
| 1432 | </HAnimSegment> |
| 1433 |
<!-- HAnimJoint
Joe_r_acromioclavicular is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_acromioclavicular node: [from r_acromioclavicularRelax.value_changed to set_rotation ] [from r_acromioclavicularRoll.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_acromioclavicular' center='-0.09 1.41 -0.11' name='r_acromioclavicular' skinCoordIndex='77 29' skinCoordWeight='1 0.9'> |
| 1434 |
<!-- HAnimSegment
Joe_r_scapula is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_scapula' name='r_scapula'> |
| 1435 | <Shape> |
| 1436 | <Appearance USE='SegmentLine'/> |
| 1437 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1438 | <Coordinate point='-0.09 1.41 -0.09 -0.2 1.44 -0.04'/> |
| 1439 | </IndexedLineSet> |
| 1440 | </Shape> |
| 1441 | <Transform translation='-0.09 1.41 -0.09'> |
| 1442 | <Shape USE='jointbox'/> |
| 1443 | </Transform> |
| 1444 | <Transform translation='-0.11 1.427 -0.1375'> |
| 1445 | <Shape USE='skinsphere'/> |
| 1446 | </Transform> |
| 1447 |
<!-- HAnimSite
Joe_r_acromion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_acromion_pt' name='r_acromion_pt' translation='-0.178 1.4825 -0.0625'> |
| 1448 | <Shape USE='sitebox'/> |
| 1449 | </HAnimSite> |
| 1450 |
<!-- HAnimSite
Joe_r_axilla_proximal_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_axilla_proximal_pt' name='r_axilla_proximal_pt' translation='-0.17 1.38 0.007'> |
| 1451 | <Shape USE='sitebox'/> |
| 1452 | </HAnimSite> |
| 1453 |
<!-- HAnimSite
Joe_r_axilla_distal_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_axilla_distal_pt' name='r_axilla_distal_pt' translation='-0.16 1.38 -0.127'> |
| 1454 | <Shape USE='sitebox'/> |
| 1455 | </HAnimSite> |
| 1456 | </HAnimSegment> |
| 1457 |
<!-- HAnimJoint
Joe_r_shoulder is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_shoulder node: [from r_shoulderRelax.value_changed to set_rotation ] [from r_shoulderRoll.value_changed to set_rotation ] [from R_SHOULDER_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_shoulder' center='-0.2 1.44 -0.04' name='r_shoulder' skinCoordIndex='29 30 32 78 218 219 220 221 86 88' skinCoordWeight='0.1 1 1 1 1 1 1 1 0.3 0.2'> |
| 1458 |
<!-- HAnimSegment
Joe_r_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_upperarm' name='r_upperarm'> |
| 1459 | <Transform translation='-0.2 1.44 -0.04'> |
| 1460 | <Shape USE='jointbox'/> |
| 1461 | </Transform> |
| 1462 | <Shape> |
| 1463 | <Appearance USE='SegmentLine'/> |
| 1464 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1465 | <Coordinate point='-0.2 1.44 -0.04 -0.2 1.1388 -0.04'/> |
| 1466 | </IndexedLineSet> |
| 1467 | </Shape> |
| 1468 | <Transform translation='-0.178 1.4825 -0.0625'> |
| 1469 | <Shape USE='skinsphere'/> |
| 1470 | </Transform> |
| 1471 | <Transform translation='-0.17 1.38 0.007'> |
| 1472 | <Shape USE='skinsphere'/> |
| 1473 | </Transform> |
| 1474 | <Transform translation='-0.16 1.38 -0.127'> |
| 1475 | <Shape USE='skinsphere'/> |
| 1476 | </Transform> |
| 1477 | <Transform translation='-0.235 1.42 -0.0625'> |
| 1478 | <Shape USE='skinsphere'/> |
| 1479 | </Transform> |
| 1480 | <Transform translation='-0.23 1.235 -0.04'> |
| 1481 | <Shape USE='skinsphere'/> |
| 1482 | </Transform> |
| 1483 | <Transform translation='-0.16 1.23 -0.04'> |
| 1484 | <Shape USE='skinsphere'/> |
| 1485 | </Transform> |
| 1486 | <Transform translation='-0.2 1.23 -0.105'> |
| 1487 | <Shape USE='skinsphere'/> |
| 1488 | </Transform> |
| 1489 | <Transform translation='-0.2 1.235 0.02'> |
| 1490 | <Shape USE='skinsphere'/> |
| 1491 | </Transform> |
| 1492 |
<!-- HAnimSite
Joe_r_humeral_medial_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_humeral_medial_epicondyle_pt' name='r_humeral_medial_epicondyle_pt' translation='-0.165 1.1388 -0.04'> |
| 1493 | <Shape USE='sitebox'/> |
| 1494 | </HAnimSite> |
| 1495 |
<!-- HAnimSite
Joe_r_radiale_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_radiale_pt' name='r_radiale_pt' translation='-0.23 1.133 -0.055'> |
| 1496 | <Shape USE='sitebox'/> |
| 1497 | </HAnimSite> |
| 1498 |
<!-- HAnimSite
Joe_r_humeral_lateral_epicondyle_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_humeral_lateral_epicondyle_pt' name='r_humeral_lateral_epicondyle_pt' translation='-0.244 1.1388 -0.04'> |
| 1499 | <Shape USE='sitebox'/> |
| 1500 | </HAnimSite> |
| 1501 | </HAnimSegment> |
| 1502 |
<!-- HAnimJoint
Joe_r_elbow is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_elbow node: [from r_elbowRelax.value_changed to set_rotation ] [from r_ForeArmPitch.value_changed to set_rotation ] [from R_ELBOW_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_elbow' center='-0.2 1.1388 -0.04' name='r_elbow' skinCoordIndex='33 34 35 225 226 227 228 229 231 232 233 234' skinCoordWeight='1 1 1 1 1 1 1 1 1 1 1 1'> |
| 1503 |
<!-- HAnimSegment
Joe_r_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_forearm' name='r_forearm'> |
| 1504 | <Shape> |
| 1505 | <Appearance USE='SegmentLine'/> |
| 1506 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1507 | <Coordinate point='-0.2 1.1388 -0.04 -0.2 0.89 -0.04'/> |
| 1508 | </IndexedLineSet> |
| 1509 | </Shape> |
| 1510 | <Transform translation='-0.2 1.1388 -0.04'> |
| 1511 | <Shape USE='jointbox'/> |
| 1512 | </Transform> |
| 1513 | <Transform translation='-0.2 1.1388 0.013'> |
| 1514 | <Shape USE='skinsphere'/> |
| 1515 | </Transform> |
| 1516 | <Transform translation='-0.225 1 -0.01'> |
| 1517 | <Shape USE='skinsphere'/> |
| 1518 | </Transform> |
| 1519 | <Transform translation='-0.225 1 -0.07'> |
| 1520 | <Shape USE='skinsphere'/> |
| 1521 | </Transform> |
| 1522 | <Transform translation='-0.185 1 -0.01'> |
| 1523 | <Shape USE='skinsphere'/> |
| 1524 | </Transform> |
| 1525 | <Transform translation='-0.185 1 -0.07'> |
| 1526 | <Shape USE='skinsphere'/> |
| 1527 | </Transform> |
| 1528 |
<!-- HAnimSite
Joe_r_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_radial_styloid_pt' name='r_radial_styloid_pt' translation='-0.2 0.9 -0.015'> |
| 1529 | <Shape USE='sitebox'/> |
| 1530 | </HAnimSite> |
| 1531 |
<!-- HAnimSite
Joe_r_olecranon_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_olecranon_pt' name='r_olecranon_pt' translation='-0.2 1.1388 -0.08'> |
| 1532 | <Shape USE='sitebox'/> |
| 1533 | </HAnimSite> |
| 1534 | </HAnimSegment> |
| 1535 |
<!-- HAnimJoint
Joe_r_radiocarpal is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_radiocarpal node: [from r_wristRelax.value_changed to set_rotation ] [from r_wristRoll.value_changed to set_rotation ] [from R_WRIST_ANIMATOR.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_radiocarpal' center='-0.2 0.89 -0.04' name='r_radiocarpal' skinCoordIndex='235 236 237 238 239 240 241 242' skinCoordWeight='1 1 1 1 1 1 1 1'> |
| 1536 |
<!-- HAnimSegment
Joe_r_carpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal' name='r_carpal'> |
| 1537 | <Shape> |
| 1538 | <Appearance USE='SegmentLine'/> |
| 1539 | <IndexedLineSet coordIndex='0 1 -1 0 2 -1 0 3 -1 0 4 -1 0 5 -1'> |
| 1540 | <Coordinate point='-0.2 0.89 -0.04 -0.2 0.85 0 -0.2 0.84 -0.015 -0.2 0.835 -0.04 -0.2 0.835 -0.065 -0.2 0.84 -0.085'/> |
| 1541 | </IndexedLineSet> |
| 1542 | </Shape> |
| 1543 | <Transform translation='-0.2 0.89 -0.04'> |
| 1544 | <Shape USE='jointbox'/> |
| 1545 | </Transform> |
| 1546 |
<!-- HAnimSite
Joe_r_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt' translation='-0.2 0.9 -0.085'> |
| 1547 | <Shape USE='sitebox'/> |
| 1548 | </HAnimSite> |
| 1549 | </HAnimSegment> |
| 1550 |
<!-- HAnimJoint
Joe_r_carpometacarpal_1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpometacarpal_1 node: [from r_thumb1Relax.value_changed to set_rotation ] [from r_thumb1Pitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpometacarpal_1' center='-0.2 0.85 0' name='r_carpometacarpal_1' skinCoordIndex='243 244' skinCoordWeight='1 1'> |
| 1551 |
<!-- HAnimSegment
Joe_r_metacarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metacarpal_1' name='r_metacarpal_1'> |
| 1552 | <Shape> |
| 1553 | <Appearance USE='SegmentLine'/> |
| 1554 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1555 | <Coordinate point='-0.2 0.85 0 -0.2 0.82 0.03'/> |
| 1556 | </IndexedLineSet> |
| 1557 | </Shape> |
| 1558 | <Transform translation='-0.2 0.85 0'> |
| 1559 | <Shape USE='jointbox'/> |
| 1560 | </Transform> |
| 1561 | </HAnimSegment> |
| 1562 |
<!-- HAnimJoint
Joe_r_metacarpophalangeal_1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metacarpophalangeal_1 node: [from r_thumb2Relax.value_changed to set_rotation ] [from r_thumb2Pitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metacarpophalangeal_1' center='-0.2 0.82 0.03' name='r_metacarpophalangeal_1' skinCoordIndex='254 255 256 257 258 259' skinCoordWeight='0.5 0.5 0.5 1 1 1'> |
| 1563 |
<!-- HAnimSegment
Joe_r_carpal_proximal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_proximal_phalanx_1' name='r_carpal_proximal_phalanx_1'> |
| 1564 | <Shape> |
| 1565 | <Appearance USE='SegmentLine'/> |
| 1566 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1567 | <Coordinate point='-0.2 0.82 0.03 -0.2 0.8 0.05'/> |
| 1568 | </IndexedLineSet> |
| 1569 | </Shape> |
| 1570 | <Transform translation='-0.2 0.82 0.03'> |
| 1571 | <Shape USE='jointbox'/> |
| 1572 | </Transform> |
| 1573 | </HAnimSegment> |
| 1574 |
<!-- HAnimJoint
Joe_r_carpal_interphalangeal_1 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_interphalangeal_1 node: [from r_thumb3Relax.value_changed to set_rotation ] [from r_thumb2Pitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_interphalangeal_1' center='-0.2 0.8 0.05' name='r_carpal_interphalangeal_1' skinCoordIndex='260 261 262 263 264 265 266 267 268' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1575 |
<!-- HAnimSegment
Joe_r_carpal_distal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_distal_phalanx_1' name='r_carpal_distal_phalanx_1'> |
| 1576 | <Shape> |
| 1577 | <Appearance USE='SegmentLine'/> |
| 1578 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1579 | <Coordinate point='-0.2 0.8 0.05 -0.2 0.78 0.07'/> |
| 1580 | </IndexedLineSet> |
| 1581 | </Shape> |
| 1582 | <Transform DEF='Thumbnail' translation='-0.2 0.785 0.075'> |
| 1583 | <Shape USE='skinsphere'/> |
| 1584 | </Transform> |
| 1585 | <Transform translation='-0.2 0.8 0.05'> |
| 1586 | <Shape USE='jointbox'/> |
| 1587 | </Transform> |
| 1588 |
<!-- HAnimSite
Joe_r_carpal_distal_phalanx_1_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_carpal_distal_phalanx_1_tip' name='r_carpal_distal_phalanx_1_tip' translation='-0.2 0.78 0.07'> |
| 1589 | <Shape USE='sitebox'/> |
| 1590 | </HAnimSite> |
| 1591 | </HAnimSegment> |
| 1592 | </HAnimJoint> |
| 1593 | </HAnimJoint> |
| 1594 | </HAnimJoint> |
| 1595 |
<!-- HAnimJoint
Joe_r_carpometacarpal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpometacarpal_2 node: [from r_index0Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpometacarpal_2' center='-0.2 0.84 -0.015' name='r_carpometacarpal_2' skinCoordIndex='245 246' skinCoordWeight='1 1'> |
| 1596 |
<!-- HAnimSegment
Joe_r_metacarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metacarpal_2' name='r_metacarpal_2'> |
| 1597 | <Shape> |
| 1598 | <Appearance USE='SegmentLine'/> |
| 1599 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1600 | <Coordinate point='-0.2 0.84 -0.015 -0.2 0.793 -0.015'/> |
| 1601 | </IndexedLineSet> |
| 1602 | </Shape> |
| 1603 | <Transform translation='-0.2 0.84 -0.015'> |
| 1604 | <Shape USE='jointbox'/> |
| 1605 | </Transform> |
| 1606 |
<!-- HAnimSite
Joe_r_metacarpal_phalanx_2_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_metacarpal_phalanx_2_pt' name='r_metacarpal_phalanx_2_pt' translation='-0.2 0.793 -0.005'> |
| 1607 | <Shape USE='sitebox'/> |
| 1608 | </HAnimSite> |
| 1609 | </HAnimSegment> |
| 1610 |
<!-- HAnimJoint
Joe_r_metacarpophalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metacarpophalangeal_2 node: [from r_index1Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metacarpophalangeal_2' center='-0.2 0.793 -0.015' name='r_metacarpophalangeal_2' skinCoordIndex='254 255 256 269 270 271 279' skinCoordWeight='0.5 0.5 0.5 1 1 1 0.5'> |
| 1611 |
<!-- HAnimSegment
Joe_r_carpal_proximal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_proximal_phalanx_2' name='r_carpal_proximal_phalanx_2'> |
| 1612 | <Shape> |
| 1613 | <Appearance USE='SegmentLine'/> |
| 1614 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1615 | <Coordinate point='-0.2 0.793 -0.015 -0.2 0.745 -0.015'/> |
| 1616 | </IndexedLineSet> |
| 1617 | </Shape> |
| 1618 | <Transform translation='-0.2 0.793 -0.015'> |
| 1619 | <Shape USE='jointbox'/> |
| 1620 | </Transform> |
| 1621 | </HAnimSegment> |
| 1622 |
<!-- HAnimJoint
Joe_r_carpal_proximal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_proximal_interphalangeal_2 node: [from r_fingers2Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_proximal_interphalangeal_2' center='-0.2 0.745 -0.015' name='r_carpal_proximal_interphalangeal_2' skinCoordIndex='282 283 284 285' skinCoordWeight='1 1 1 1'> |
| 1623 |
<!-- HAnimSegment
Joe_r_carpal_middle_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_middle_phalanx_2' name='r_carpal_middle_phalanx_2'> |
| 1624 | <Shape> |
| 1625 | <Appearance USE='SegmentLine'/> |
| 1626 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1627 | <Coordinate point='-0.2 0.745 -0.015 -0.2 0.72 -0.015'/> |
| 1628 | </IndexedLineSet> |
| 1629 | </Shape> |
| 1630 | <Transform translation='-0.2 0.745 -0.015'> |
| 1631 | <Shape USE='jointbox'/> |
| 1632 | </Transform> |
| 1633 | </HAnimSegment> |
| 1634 |
<!-- HAnimJoint
Joe_r_carpal_distal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_distal_interphalangeal_2 node: [from r_fingers3Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_distal_interphalangeal_2' center='-0.2 0.72 -0.015' name='r_carpal_distal_interphalangeal_2' skinCoordIndex='286 287 288 289 290 291 292 293 294' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1635 |
<!-- HAnimSegment
Joe_r_carpal_distal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_distal_phalanx_2' name='r_carpal_distal_phalanx_2'> |
| 1636 | <Shape> |
| 1637 | <Appearance USE='SegmentLine'/> |
| 1638 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1639 | <Coordinate point='-0.2 0.72 -0.015 -0.2 0.695 -0.015'/> |
| 1640 | </IndexedLineSet> |
| 1641 | </Shape> |
| 1642 | <Transform translation='-0.2 0.72 -0.015'> |
| 1643 | <Shape USE='jointbox'/> |
| 1644 | </Transform> |
| 1645 |
<!-- HAnimSite
Joe_r_carpal_distal_phalanx_2_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_carpal_distal_phalanx_2_tip' name='r_carpal_distal_phalanx_2_tip' translation='-0.2 0.695 -0.015'> |
| 1646 | <Shape USE='sitebox'/> |
| 1647 | </HAnimSite> |
| 1648 | </HAnimSegment> |
| 1649 | </HAnimJoint> |
| 1650 | </HAnimJoint> |
| 1651 | </HAnimJoint> |
| 1652 | </HAnimJoint> |
| 1653 |
<!-- HAnimJoint
Joe_r_carpometacarpal_3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpometacarpal_3 node: [from r_middle0Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpometacarpal_3' center='-0.2 0.835 -0.04' name='r_carpometacarpal_3' skinCoordIndex='247 248' skinCoordWeight='1 1'> |
| 1654 |
<!-- HAnimSegment
Joe_r_metacarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metacarpal_3' name='r_metacarpal_3'> |
| 1655 | <Shape> |
| 1656 | <Appearance USE='SegmentLine'/> |
| 1657 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1658 | <Coordinate point='-0.2 0.835 -0.04 -0.2 0.788 -0.04'/> |
| 1659 | </IndexedLineSet> |
| 1660 | </Shape> |
| 1661 | <Transform translation='-0.2 0.835 -0.04'> |
| 1662 | <Shape USE='jointbox'/> |
| 1663 | </Transform> |
| 1664 | </HAnimSegment> |
| 1665 |
<!-- HAnimJoint
Joe_r_metacarpophalangeal_3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metacarpophalangeal_3 node: [from r_middle1Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metacarpophalangeal_3' center='-0.2 0.788 -0.04' name='r_metacarpophalangeal_3' skinCoordIndex='272 273 279 280' skinCoordWeight='1 1 0.5 0.5'> |
| 1666 |
<!-- HAnimSegment
Joe_r_carpal_proximal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_proximal_phalanx_3' name='r_carpal_proximal_phalanx_3'> |
| 1667 | <Shape> |
| 1668 | <Appearance USE='SegmentLine'/> |
| 1669 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1670 | <Coordinate point='-0.2 0.788 -0.04 -0.2 0.74 -0.04'/> |
| 1671 | </IndexedLineSet> |
| 1672 | </Shape> |
| 1673 | <Transform translation='-0.2 0.788 -0.04'> |
| 1674 | <Shape USE='jointbox'/> |
| 1675 | </Transform> |
| 1676 | </HAnimSegment> |
| 1677 |
<!-- HAnimJoint
Joe_r_carpal_proximal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_proximal_interphalangeal_3 node: [from r_fingers2Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_proximal_interphalangeal_3' center='-0.2 0.74 -0.04' name='r_carpal_proximal_interphalangeal_3' skinCoordIndex='295 296 297 298' skinCoordWeight='1 1 1 1'> |
| 1678 |
<!-- HAnimSegment
Joe_r_carpal_middle_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_middle_phalanx_3' name='r_carpal_middle_phalanx_3'> |
| 1679 | <Shape> |
| 1680 | <Appearance USE='SegmentLine'/> |
| 1681 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1682 | <Coordinate point='-0.2 0.74 -0.04 -0.2 0.7142 -0.04'/> |
| 1683 | </IndexedLineSet> |
| 1684 | </Shape> |
| 1685 | <Transform translation='-0.2 0.74 -0.04'> |
| 1686 | <Shape USE='jointbox'/> |
| 1687 | </Transform> |
| 1688 | </HAnimSegment> |
| 1689 |
<!-- HAnimJoint
Joe_r_carpal_distal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_distal_interphalangeal_3 node: [from r_fingers3Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_distal_interphalangeal_3' center='-0.2 0.7142 -0.04' name='r_carpal_distal_interphalangeal_3' skinCoordIndex='299 300 301 302 303 304 305 306 307' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1690 |
<!-- HAnimSegment
Joe_r_carpal_distal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_distal_phalanx_3' name='r_carpal_distal_phalanx_3'> |
| 1691 | <Shape> |
| 1692 | <Appearance USE='SegmentLine'/> |
| 1693 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1694 | <Coordinate point='-0.2 0.7142 -0.04 -0.2 0.6758 -0.04'/> |
| 1695 | </IndexedLineSet> |
| 1696 | </Shape> |
| 1697 | <Transform translation='-0.2 0.7142 -0.04'> |
| 1698 | <Shape USE='jointbox'/> |
| 1699 | </Transform> |
| 1700 |
<!-- HAnimSite
Joe_r_dactylion_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_dactylion_pt' name='r_dactylion_pt' translation='-0.2 0.68 -0.04'> |
| 1701 | <Shape USE='sitebox'/> |
| 1702 | </HAnimSite> |
| 1703 |
<!-- HAnimSite
Joe_r_carpal_distal_phalanx_3_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_carpal_distal_phalanx_3_tip' name='r_carpal_distal_phalanx_3_tip' translation='-0.2 0.68 -0.04'> |
| 1704 | <Shape USE='sitebox'/> |
| 1705 | </HAnimSite> |
| 1706 | </HAnimSegment> |
| 1707 | </HAnimJoint> |
| 1708 | </HAnimJoint> |
| 1709 | </HAnimJoint> |
| 1710 | </HAnimJoint> |
| 1711 |
<!-- HAnimJoint
Joe_r_carpometacarpal_4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpometacarpal_4 node: [from r_ring0Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpometacarpal_4' center='-0.2 0.835 -0.065' name='r_carpometacarpal_4' skinCoordIndex='249 250' skinCoordWeight='1 1'> |
| 1712 |
<!-- HAnimSegment
Joe_r_metacarpal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metacarpal_4' name='r_metacarpal_4'> |
| 1713 | <Shape> |
| 1714 | <Appearance USE='SegmentLine'/> |
| 1715 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1716 | <Coordinate point='-0.2 0.835 -0.065 -0.2 0.793 -0.065'/> |
| 1717 | </IndexedLineSet> |
| 1718 | </Shape> |
| 1719 | <Transform translation='-0.2 0.835 -0.065'> |
| 1720 | <Shape USE='jointbox'/> |
| 1721 | </Transform> |
| 1722 | </HAnimSegment> |
| 1723 |
<!-- HAnimJoint
Joe_r_metacarpophalangeal_4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metacarpophalangeal_4 node: [from r_ring1Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metacarpophalangeal_4' center='-0.2 0.793 -0.065' name='r_metacarpophalangeal_4' skinCoordIndex='274 275 280 281' skinCoordWeight='1 1 0.5 0.5'> |
| 1724 |
<!-- HAnimSegment
Joe_r_carpal_proximal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_proximal_phalanx_4' name='r_carpal_proximal_phalanx_4'> |
| 1725 | <Shape> |
| 1726 | <Appearance USE='SegmentLine'/> |
| 1727 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1728 | <Coordinate point='-0.2 0.793 -0.065 -0.2 0.74 -0.065'/> |
| 1729 | </IndexedLineSet> |
| 1730 | </Shape> |
| 1731 | <Transform translation='-0.2 0.793 -0.065'> |
| 1732 | <Shape USE='jointbox'/> |
| 1733 | </Transform> |
| 1734 | </HAnimSegment> |
| 1735 |
<!-- HAnimJoint
Joe_r_carpal_proximal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_proximal_interphalangeal_4 node: [from r_fingers2Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_proximal_interphalangeal_4' center='-0.2 0.74 -0.065' name='r_carpal_proximal_interphalangeal_4' skinCoordIndex='308 309 310 311' skinCoordWeight='1 1 1 1'> |
| 1736 |
<!-- HAnimSegment
Joe_r_carpal_middle_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_middle_phalanx_4' name='r_carpal_middle_phalanx_4'> |
| 1737 | <Shape> |
| 1738 | <Appearance USE='SegmentLine'/> |
| 1739 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1740 | <Coordinate point='-0.2 0.74 -0.065 -0.2 0.7177 -0.065'/> |
| 1741 | </IndexedLineSet> |
| 1742 | </Shape> |
| 1743 | <Transform translation='-0.2 0.74 -0.065'> |
| 1744 | <Shape USE='jointbox'/> |
| 1745 | </Transform> |
| 1746 | </HAnimSegment> |
| 1747 |
<!-- HAnimJoint
Joe_r_carpal_distal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_distal_interphalangeal_4 node: [from r_fingers3Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_distal_interphalangeal_4' center='-0.2 0.7177 -0.065' name='r_carpal_distal_interphalangeal_4' skinCoordIndex='312 313 314 315 316 317 318 319 320' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1748 |
<!-- HAnimSegment
Joe_r_carpal_distal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_distal_phalanx_4' name='r_carpal_distal_phalanx_4'> |
| 1749 | <Shape> |
| 1750 | <Appearance USE='SegmentLine'/> |
| 1751 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1752 | <Coordinate point='-0.2 0.7177 -0.065 -0.2 0.695 -0.065'/> |
| 1753 | </IndexedLineSet> |
| 1754 | </Shape> |
| 1755 | <Transform translation='-0.2 0.7177 -0.065'> |
| 1756 | <Shape USE='jointbox'/> |
| 1757 | </Transform> |
| 1758 |
<!-- HAnimSite
Joe_r_carpal_distal_phalanx_4_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_carpal_distal_phalanx_4_tip' name='r_carpal_distal_phalanx_4_tip' translation='-0.2 0.695 -0.065'> |
| 1759 | <Shape USE='sitebox'/> |
| 1760 | </HAnimSite> |
| 1761 | </HAnimSegment> |
| 1762 | </HAnimJoint> |
| 1763 | </HAnimJoint> |
| 1764 | </HAnimJoint> |
| 1765 | </HAnimJoint> |
| 1766 |
<!-- HAnimJoint
Joe_r_carpometacarpal_5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpometacarpal_5 node: [from r_pinky0Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpometacarpal_5' center='-0.2 0.84 -0.085' name='r_carpometacarpal_5' skinCoordIndex='251 252 253 281' skinCoordWeight='1 1 1 0.5'> |
| 1767 |
<!-- HAnimSegment
Joe_r_metacarpal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_metacarpal_5' name='r_metacarpal_5'> |
| 1768 | <Shape> |
| 1769 | <Appearance USE='SegmentLine'/> |
| 1770 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1771 | <Coordinate point='-0.2 0.84 -0.085 -0.2 0.79 -0.085'/> |
| 1772 | </IndexedLineSet> |
| 1773 | </Shape> |
| 1774 | <Transform translation='-0.2 0.84 -0.085'> |
| 1775 | <Shape USE='jointbox'/> |
| 1776 | </Transform> |
| 1777 |
<!-- HAnimSite
Joe_r_metacarpal_phalanx_5_pt is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_metacarpal_phalanx_5_pt' name='r_metacarpal_phalanx_5_pt' translation='-0.2 0.79 -0.095'> |
| 1778 | <Shape USE='sitebox'/> |
| 1779 | </HAnimSite> |
| 1780 | </HAnimSegment> |
| 1781 |
<!-- HAnimJoint
Joe_r_metacarpophalangeal_5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_metacarpophalangeal_5 node: [from r_pinky1Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_metacarpophalangeal_5' center='-0.2 0.79 -0.085' name='r_metacarpophalangeal_5' skinCoordIndex='276 277 278' skinCoordWeight='1 1 1'> |
| 1782 |
<!-- HAnimSegment
Joe_r_carpal_proximal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_proximal_phalanx_5' name='r_carpal_proximal_phalanx_5'> |
| 1783 | <Shape> |
| 1784 | <Appearance USE='SegmentLine'/> |
| 1785 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1786 | <Coordinate point='-0.2 0.79 -0.085 -0.2 0.755 -0.085'/> |
| 1787 | </IndexedLineSet> |
| 1788 | </Shape> |
| 1789 | <Transform translation='-0.2 0.79 -0.085'> |
| 1790 | <Shape USE='jointbox'/> |
| 1791 | </Transform> |
| 1792 | </HAnimSegment> |
| 1793 |
<!-- HAnimJoint
Joe_r_carpal_proximal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_proximal_interphalangeal_5 node: [from r_fingers2Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_proximal_interphalangeal_5' center='-0.2 0.755 -0.085' name='r_carpal_proximal_interphalangeal_5' skinCoordIndex='321 322 323 324' skinCoordWeight='1 1 1 1'> |
| 1794 |
<!-- HAnimSegment
Joe_r_carpal_middle_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_middle_phalanx_5' name='r_carpal_middle_phalanx_5'> |
| 1795 | <Shape> |
| 1796 | <Appearance USE='SegmentLine'/> |
| 1797 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1798 | <Coordinate point='-0.2 0.755 -0.085 -0.2 0.735 -0.085'/> |
| 1799 | </IndexedLineSet> |
| 1800 | </Shape> |
| 1801 | <Transform translation='-0.2 0.755 -0.085'> |
| 1802 | <Shape USE='jointbox'/> |
| 1803 | </Transform> |
| 1804 | </HAnimSegment> |
| 1805 |
<!-- HAnimJoint
Joe_r_carpal_distal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1
<!-- ROUTE information for Joe_r_carpal_distal_interphalangeal_5 node: [from r_fingers3Relax.value_changed to set_rotation ] [from r_handPitch.value_changed to set_rotation ] --> <HAnimJoint DEF='Joe_r_carpal_distal_interphalangeal_5' center='-0.2 0.735 -0.09' name='r_carpal_distal_interphalangeal_5' skinCoordIndex='325 326 327 328 329 330 331 332 333' skinCoordWeight='1 1 1 1 1 1 1 1 1'> |
| 1806 |
<!-- HAnimSegment
Joe_r_carpal_distal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='Joe_r_carpal_distal_phalanx_5' name='r_carpal_distal_phalanx_5'> |
| 1807 | <Shape> |
| 1808 | <Appearance USE='SegmentLine'/> |
| 1809 | <IndexedLineSet coordIndex='0 1 -1'> |
| 1810 | <Coordinate point='-0.2 0.735 -0.085 -0.2 0.72 -0.085'/> |
| 1811 | </IndexedLineSet> |
| 1812 | </Shape> |
| 1813 | <Transform translation='-0.2 0.735 -0.085'> |
| 1814 | <Shape USE='jointbox'/> |
| 1815 | </Transform> |
| 1816 |
<!-- HAnimSite
Joe_r_carpal_distal_phalanx_5_tip is a DEF node that has 1 USE node: USE_1 -->
<HAnimSite DEF='Joe_r_carpal_distal_phalanx_5_tip' name='r_carpal_distal_phalanx_5_tip' translation='-0.2 0.72 -0.085'> |
| 1817 | <Shape USE='sitebox'/> |
| 1818 | </HAnimSite> |
| 1819 | </HAnimSegment> |
| 1820 | </HAnimJoint> |
| 1821 | </HAnimJoint> |
| 1822 | </HAnimJoint> |
| 1823 | </HAnimJoint> |
| 1824 | </HAnimJoint> |
| 1825 | </HAnimJoint> |
| 1826 | </HAnimJoint> |
| 1827 | </HAnimJoint> |
| 1828 | </HAnimJoint> |
| 1829 | </HAnimJoint> |
| 1830 | </HAnimJoint> |
| 1831 | </HAnimJoint> |
| 1832 | </HAnimJoint> |
| 1833 | </HAnimJoint> |
| 1834 | </HAnimJoint> |
| 1835 | </HAnimJoint> |
| 1836 | </HAnimJoint> |
| 1837 | </HAnimJoint> |
| 1838 | </HAnimJoint> |
| 1839 | </HAnimJoint> |
| 1840 | </HAnimJoint> |
| 1841 | </HAnimJoint> |
| 1842 | </HAnimJoint> |
| 1843 | </HAnimJoint> |
| 1844 | </HAnimJoint> |
| 1845 | </HAnimJoint> |
| 1846 | </HAnimJoint> |
| 1847 | <Shape DEF='SkinShape' containerField='skin'> |
| 1848 | <Appearance DEF='SkinAppearance'> |
| 1849 | <Material DEF='SkinMaterial' ambientIntensity='0.6' diffuseColor='1 1 1' shininess='0.6' transparency='0.2'/> |
| 1850 |
<ImageTexture DEF='zBlueSpiralBkg2' description='Blue Spiral Pattern'
url=' "zBlueSpiralBkg2.gif " "https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Skin/zBlueSpiralBkg2.gif
" "https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Skin/zBlueSpiralBkg2.gif " '/>
" '/>
|
| 1851 | </Appearance> |
| 1852 | <IndexedFaceSet creaseAngle='3.1' coordIndex='0 9 5 -1 0 7 9 -1 0 5 1 -1 1 5 2 -1 1 3 7 -1 2 4 3 -1 0 1 7 -1 1 2 3 -1 5 6 2 -1 7 3 8 -1 6 4 2 -1 3 4 8 -1 9 6 5 -1 9 7 8 -1 4 6 10 -1 4 10 12 -1 4 12 8 -1 10 11 12 -1 9 75 24 -1 9 24 74 -1 9 8 75 -1 9 74 6 -1 10 6 74 -1 12 75 8 -1 74 24 29 -1 24 77 29 -1 10 74 29 -1 77 32 29 -1 32 78 29 -1 78 30 29 -1 30 10 29 -1 41 24 75 -1 41 75 12 -1 41 12 42 -1 41 42 80 -1 41 80 44 -1 41 44 79 -1 41 79 24 -1 81 24 79 -1 81 77 24 -1 81 25 77 -1 81 79 25 -1 25 79 44 -1 25 32 77 -1 25 83 32 -1 25 26 83 -1 25 27 26 -1 25 84 27 -1 25 44 84 -1 11 10 30 -1 11 30 13 -1 11 13 15 -1 11 15 14 -1 11 14 42 -1 11 42 12 -1 15 13 16 -1 15 18 14 -1 15 16 76 -1 15 76 18 -1 76 16 17 -1 76 17 82 -1 76 82 19 -1 76 19 18 -1 22 18 19 -1 22 87 18 -1 22 27 84 -1 22 84 87 -1 87 84 85 -1 85 84 44 -1 85 42 14 -1 87 14 18 -1 87 85 14 -1 20 83 26 -1 20 17 16 -1 20 16 88 -1 20 88 83 -1 88 16 13 -1 88 13 86 -1 88 86 83 -1 86 13 30 -1 86 32 83 -1 23 89 22 -1 89 27 22 -1 89 91 27 -1 91 26 27 -1 91 20 26 -1 21 20 91 -1 21 17 20 -1 21 92 17 -1 82 17 92 -1 82 90 19 -1 23 22 19 -1 23 19 90 -1 82 92 101 -1 82 101 99 -1 82 99 93 -1 82 93 95 -1 82 95 97 -1 82 97 90 -1 23 90 97 -1 23 97 94 -1 23 94 89 -1 89 94 96 -1 89 96 95 -1 89 95 93 -1 89 93 91 -1 91 93 99 -1 91 99 100 -1 91 100 98 -1 21 91 98 -1 21 98 101 -1 21 101 92 -1 85 105 42 -1 85 103 105 -1 85 44 103 -1 103 44 104 -1 80 42 105 -1 80 105 102 -1 80 102 104 -1 80 104 44 -1 105 109 102 -1 102 109 47 -1 47 104 102 -1 104 47 45 -1 104 45 103 -1 103 45 46 -1 103 46 109 -1 103 109 105 -1 109 112 110 -1 109 110 47 -1 47 110 111 -1 47 111 45 -1 45 111 113 -1 113 46 45 -1 46 113 112 -1 112 109 46 -1 112 118 110 -1 110 118 115 -1 110 115 111 -1 111 115 117 -1 111 117 113 -1 113 117 116 -1 113 116 112 -1 112 116 118 -1 115 118 119 -1 119 118 122 -1 118 116 122 -1 122 116 120 -1 116 117 120 -1 120 117 121 -1 117 115 121 -1 115 119 121 -1 119 127 123 -1 119 122 127 -1 122 126 127 -1 122 128 126 -1 122 120 128 -1 120 124 128 -1 120 121 124 -1 121 125 124 -1 121 119 125 -1 119 123 125 -1 127 129 123 -1 127 126 129 -1 129 126 141 -1 141 126 143 -1 126 142 143 -1 126 128 142 -1 128 124 130 -1 142 128 130 -1 124 132 130 -1 124 134 132 -1 125 134 124 -1 125 136 134 -1 125 137 136 -1 125 135 137 -1 125 133 135 -1 125 123 133 -1 123 131 133 -1 123 129 131 -1 131 129 138 -1 129 141 138 -1 138 141 144 -1 141 143 144 -1 143 146 144 -1 142 146 143 -1 142 145 146 -1 139 145 142 -1 130 139 142 -1 139 130 132 -1 139 132 154 -1 132 157 154 -1 132 159 157 -1 132 134 159 -1 134 136 159 -1 136 161 159 -1 136 137 161 -1 137 162 161 -1 160 162 137 -1 135 160 137 -1 133 160 135 -1 133 158 160 -1 131 158 133 -1 156 158 131 -1 153 156 131 -1 131 138 153 -1 138 155 153 -1 140 155 138 -1 138 144 140 -1 144 147 140 -1 140 147 145 -1 140 145 139 -1 139 155 140 -1 154 155 139 -1 146 149 144 -1 146 151 149 -1 145 151 146 -1 150 151 145 -1 145 152 150 -1 147 152 145 -1 147 149 152 -1 147 144 149 -1 148 149 151 -1 148 152 149 -1 148 150 152 -1 148 151 150 -1 160 207 162 -1 160 205 207 -1 165 208 205 -1 160 165 205 -1 158 165 160 -1 161 162 207 -1 161 207 206 -1 165 206 208 -1 206 165 161 -1 161 165 159 -1 207 209 211 -1 205 209 207 -1 205 212 209 -1 205 208 212 -1 206 212 208 -1 206 210 212 -1 206 207 210 -1 207 211 210 -1 209 212 213 -1 212 216 213 -1 212 214 216 -1 210 214 212 -1 210 215 214 -1 210 211 215 -1 209 215 211 -1 209 213 215 -1 217 213 216 -1 217 215 213 -1 217 214 215 -1 217 216 214 -1 158 194 165 -1 192 194 158 -1 164 195 192 -1 158 164 192 -1 156 164 158 -1 159 194 165 -1 159 194 193 -1 159 193 195 -1 159 195 164 -1 159 164 157 -1 157 164 180 -1 192 198 194 -1 192 196 198 -1 192 195 196 -1 195 199 196 -1 196 199 200 -1 199 203 200 -1 193 199 195 -1 193 197 199 -1 193 198 197 -1 193 194 198 -1 199 201 203 -1 197 201 199 -1 197 198 201 -1 198 202 201 -1 196 202 198 -1 200 202 196 -1 204 202 200 -1 204 201 202 -1 204 203 201 -1 204 200 203 -1 156 181 164 -1 156 179 181 -1 156 182 179 -1 156 163 182 -1 163 180 182 -1 157 180 163 -1 164 181 180 -1 179 182 183 -1 182 186 183 -1 182 184 186 -1 180 184 182 -1 180 181 184 -1 181 185 184 -1 179 185 181 -1 183 185 179 -1 183 186 187 -1 186 190 187 -1 184 190 186 -1 184 188 190 -1 184 185 188 -1 185 189 188 -1 185 183 189 -1 183 187 189 -1 191 189 187 -1 191 188 189 -1 191 190 188 -1 191 187 190 -1 153 163 156 -1 153 168 163 -1 153 166 168 -1 153 169 166 -1 155 169 153 -1 155 167 169 -1 154 167 155 -1 154 163 167 -1 154 157 163 -1 163 168 167 -1 166 169 170 -1 169 173 170 -1 169 171 173 -1 169 167 171 -1 167 168 171 -1 168 172 171 -1 168 170 172 -1 170 168 166 -1 170 173 174 -1 173 177 174 -1 173 175 177 -1 173 171 175 -1 171 172 175 -1 172 176 175 -1 172 174 176 -1 170 174 172 -1 178 176 174 -1 178 175 176 -1 178 177 175 -1 178 174 177 -1 86 30 221 -1 86 221 219 -1 86 219 32 -1 32 219 220 -1 78 32 220 -1 78 220 218 -1 78 218 221 -1 78 221 30 -1 221 225 219 -1 219 225 35 -1 35 33 219 -1 33 220 219 -1 33 34 220 -1 220 34 218 -1 221 218 34 -1 34 225 221 -1 225 226 228 -1 225 228 35 -1 35 228 229 -1 35 229 33 -1 33 229 227 -1 33 227 34 -1 34 227 226 -1 34 226 225 -1 226 234 228 -1 228 234 232 -1 232 229 228 -1 232 233 229 -1 229 233 227 -1 227 233 231 -1 227 231 226 -1 226 231 234 -1 231 235 234 -1 235 238 234 -1 234 238 232 -1 238 236 232 -1 232 236 233 -1 236 237 233 -1 233 237 231 -1 231 237 235 -1 235 239 243 -1 235 243 238 -1 238 243 242 -1 238 242 244 -1 238 244 236 -1 236 244 240 -1 236 240 237 -1 237 240 241 -1 237 241 235 -1 235 241 239 -1 243 239 245 -1 243 245 242 -1 245 257 242 -1 257 259 242 -1 242 259 258 -1 242 258 244 -1 244 246 240 -1 258 246 244 -1 240 246 248 -1 240 248 250 -1 241 240 250 -1 241 250 252 -1 241 252 253 -1 241 253 251 -1 241 251 249 -1 241 249 239 -1 239 249 247 -1 239 247 245 -1 247 254 245 -1 245 254 257 -1 254 260 257 -1 257 260 259 -1 259 260 262 -1 258 259 262 -1 258 262 261 -1 255 258 261 -1 246 258 255 -1 255 248 246 -1 255 270 248 -1 248 270 273 -1 248 273 275 -1 248 275 250 -1 250 275 252 -1 252 275 277 -1 252 277 253 -1 253 277 278 -1 276 253 278 -1 251 253 276 -1 249 251 276 -1 249 276 274 -1 247 249 274 -1 272 247 274 -1 269 247 272 -1 247 269 254 -1 254 269 271 -1 256 254 271 -1 254 256 260 -1 260 256 263 -1 256 261 263 -1 256 255 261 -1 255 256 271 -1 270 255 271 -1 262 260 265 -1 262 265 267 -1 261 262 267 -1 266 261 267 -1 261 266 268 -1 263 261 268 -1 263 268 265 -1 263 265 260 -1 264 267 265 -1 264 265 268 -1 264 268 266 -1 264 266 267 -1 276 278 323 -1 276 323 321 -1 281 321 324 -1 276 321 281 -1 274 276 281 -1 277 323 278 -1 277 322 323 -1 281 324 322 -1 322 277 281 -1 277 275 281 -1 323 327 325 -1 321 323 325 -1 321 325 328 -1 321 328 324 -1 322 324 328 -1 322 328 326 -1 322 326 323 -1 323 326 327 -1 325 329 328 -1 328 329 332 -1 328 332 330 -1 326 328 330 -1 326 330 331 -1 326 331 327 -1 325 327 331 -1 325 331 329 -1 333 332 329 -1 333 329 331 -1 333 331 330 -1 333 330 332 -1 274 281 310 -1 308 274 310 -1 280 308 311 -1 274 308 280 -1 272 274 280 -1 275 310 281 -1 275 309 310 -1 275 311 309 -1 275 280 311 -1 275 273 280 -1 273 296 280 -1 308 310 314 -1 308 314 312 -1 308 312 311 -1 311 312 315 -1 312 316 315 -1 315 316 319 -1 309 311 315 -1 309 315 313 -1 309 313 314 -1 309 314 310 -1 315 319 317 -1 313 315 317 -1 313 317 314 -1 314 317 318 -1 312 314 318 -1 316 312 318 -1 320 316 318 -1 320 318 317 -1 320 317 319 -1 320 319 316 -1 272 280 297 -1 272 297 295 -1 272 295 298 -1 272 298 279 -1 279 298 296 -1 273 279 296 -1 280 296 297 -1 295 299 298 -1 298 299 302 -1 298 302 300 -1 296 298 300 -1 296 300 297 -1 297 300 301 -1 295 297 301 -1 299 295 301 -1 299 303 302 -1 302 303 306 -1 300 302 306 -1 300 306 304 -1 300 304 301 -1 301 304 305 -1 301 305 299 -1 299 305 303 -1 307 303 305 -1 307 305 304 -1 307 304 306 -1 307 306 303 -1 269 272 279 -1 269 279 284 -1 269 284 282 -1 269 282 285 -1 271 269 285 -1 271 285 283 -1 270 271 283 -1 270 283 279 -1 270 279 273 -1 279 283 284 -1 282 286 285 -1 285 286 289 -1 285 289 287 -1 285 287 283 -1 283 287 284 -1 284 287 288 -1 284 288 286 -1 286 282 284 -1 286 290 289 -1 289 290 293 -1 289 293 291 -1 289 291 287 -1 287 291 288 -1 288 291 292 -1 288 292 290 -1 286 288 290 -1 294 290 292 -1 294 292 291 -1 294 291 293 -1 294 293 290 -1 97 334 336 -1 97 336 94 -1 94 336 96 -1 336 335 96 -1 96 335 95 -1 95 335 337 -1 95 337 334 -1 95 334 97 -1 334 341 336 -1 336 341 338 -1 336 338 335 -1 335 338 340 -1 335 340 337 -1 337 340 339 -1 337 339 334 -1 334 339 341 -1 341 345 342 -1 341 342 338 -1 338 342 340 -1 340 342 344 -1 340 344 339 -1 339 344 343 -1 339 343 345 -1 339 345 341 -1 345 349 342 -1 342 349 351 -1 342 351 346 -1 342 346 344 -1 71 346 348 -1 71 344 346 -1 71 348 347 -1 71 347 344 -1 344 347 343 -1 343 347 352 -1 343 352 349 -1 343 349 345 -1 349 352 356 -1 349 356 353 -1 349 353 355 -1 349 355 351 -1 354 356 352 -1 354 352 350 -1 354 350 351 -1 354 351 355 -1 353 356 357 -1 353 357 358 -1 353 358 359 -1 353 359 360 -1 353 360 361 -1 353 361 355 -1 354 357 356 -1 350 346 351 -1 348 346 347 -1 350 347 346 -1 350 352 347 -1 354 358 357 -1 354 359 358 -1 354 360 359 -1 354 361 360 -1 354 355 361 -1 101 362 365 -1 101 365 99 -1 99 365 100 -1 100 365 363 -1 100 363 98 -1 98 363 364 -1 98 364 101 -1 101 364 362 -1 362 369 367 -1 362 367 365 -1 365 367 363 -1 363 367 368 -1 363 367 368 -1 363 368 366 -1 363 366 364 -1 364 366 362 -1 362 366 369 -1 369 373 371 -1 369 371 367 -1 367 371 368 -1 368 371 372 -1 368 372 366 -1 366 372 370 -1 366 370 369 -1 369 370 373 -1 373 377 380 -1 373 380 375 -1 373 375 371 -1 371 375 372 -1 372 375 376 -1 372 376 374 -1 372 374 370 -1 370 374 379 -1 373 370 379 -1 373 379 377 -1 377 379 383 -1 377 383 381 -1 377 381 384 -1 377 384 380 -1 381 383 389 -1 381 389 388 -1 381 388 387 -1 381 387 386 -1 381 386 385 -1 381 385 384 -1 376 375 374 -1 378 379 374 -1 378 374 375 -1 378 375 380 -1 382 386 387 -1 382 387 388 -1 382 388 389 -1 382 389 383 -1 382 383 379 -1 382 379 378 -1 382 378 380 -1 382 380 384 -1 382 384 385 -1 382 385 386 -1'> |
| 1853 | <Color color='1 0 0 0 1 1 0 1 0 1 1 0 1 1 0 1 0 0 0 1 0 0 0 1 0 1 1 0 1 1 1 1 0 1 1 0 1 1 0 1 1 0 0 1 0 0 0 1 0 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 0 0 1 1 0 1 1 0 1 1 1 1 0 0 0 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 1 1 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 0 0 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 0 0 1 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 0 0 1 1 1 0 0 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 0 1 0 0 1 0 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 0 1 0 1 0 1 1 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 0 0 0 1 1 1 0 0 0 1 0 0 1 0 0 1 1 1 0 0 1 0 0 0 1 1 1 0 1 1 0 0 0 1 0 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 0 1 0 1 1 1 0 0 1 0 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 0 0 1 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 1 0 1 1 0 1 1 0 1 1 0 1 0 1 0 1 0 0 0 1 0 1 0 0 0 1 0 1 0 0 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 0 0 1 1 0 0 0 1 0 0 0 1 0 1 1 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 0 0 0 1 0 1 1 1 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 0 1 0 0 0 1 0 1 0 1 1 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 0 1 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 0 0 1 1 1 0 1 0 1 1 0 1 1 0 1 1 0 1 0 1 0 1 0 0 0 1 0 1 0 0 0 1 0 1 0 0 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 0 0 1 1 0 0 0 1 0 0 0 1 0 1 1 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 0 0 0 1 0 1 1 1 0 0 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 0 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 0 1 0 0 0 1 0 1 0 1 1 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 0 1 0 1 0 1 0 1 0 1 0 1 1 1 0 0 0 1 0 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 0 0 1 1 0 1 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1 0 0 0 1 0 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 0 1 0 1 1 0 1 0 1 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 0 1 1 1 0 0 1 0 0 0 1 1 0 1 0 1 0 1 1 0 0 1 0 1 1 0 0 0 1 0 1 0 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 0 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1 1'/> |
| 1854 |
<!-- Coordinate
TheSkinCoord is a DEF node that has 1 USE node: USE_1 --> <Coordinate DEF='TheSkinCoord' point='0 1.77 0 0 1.665 0.09 -0.033 1.62 0.087 0.033 1.62 0.087 0 1.55 0.097 -0.077 1.64 -0.01 -0.0527 1.58 0.015 0.077 1.64 -0.01 0.0527 1.58 0.015 0 1.625 -0.0925 -0.03 1.46 0.035 0 1.44 0.03 0.03 1.46 0.035 -0.1135 1.318 0.095 0.1135 1.318 0.095 0 1.25 0.113 -0.087 1.19 0.09 -0.0935 1.03 0.075 0.087 1.19 0.09 0.0935 1.03 0.075 -0.1425 1.065 0.0033 -0.15 0.9 -0.01 0.1425 1.065 0.0033 0.15 0.9 -0.01 0 1.53 -0.084 0.0049 1.1908 -0.1113 -0.0773 1.019 -0.12 0.0773 1.019 -0.12 0.005 1.0915 -0.1091 -0.178 1.4825 -0.0625 -0.17 1.38 0.007 -0.1884 0.8676 -0.036 -0.16 1.38 -0.127 -0.2 1.1388 -0.08 -0.244 1.1388 -0.04 -0.165 1.1388 -0.04 -0.23 1.133 -0.055 -0.1977 0.8169 -0.0177 -0.1941 0.6772 -0.0423 -0.2117 0.8562 -0.0584 -0.1929 0.789 -0.1064 0.175 1.4825 -0.06 0.17 1.38 0.007 0.1901 0.8645 -0.0415 0.16 1.38 -0.125 0.2 1.1388 -0.08 0.165 1.1388 -0.04 0.244 1.1388 -0.04 0.23 1.133 -0.055 0.2009 0.8139 -0.0237 0.2056 0.6743 -0.0482 0.2142 0.8529 -0.0648 0.1929 0.786 -0.1122 -0.1 0.4913 -0.03 -0.17 0.466 0 -0.05 0.466 0 -0.165 0.01 0.12 -0.15 0.07 0 -0.085 0.086 0.0125 -0.09 0.056 0.0125 -0.115 0.02 0.122 -0.115 0.04 -0.055 -0.11 0.011 0.19 0.0993 0.4881 -0.0309 0.17 0.466 0 0.05 0.4867 0 0.165 0.01 0.12 0.15 0.07 0 0.085 0.086 0.0125 0.09 0.056 0.0125 0.115 0.02 0.122 0.115 0.04 -0.055 0.11 0.011 0.19 0 0.875 0 -0.0646 1.5149 -0.038 0.0646 1.5149 -0.038 0 1.0723 0.09 -0.11 1.427 -0.1375 -0.235 1.42 -0.0625 0.11 1.427 -0.1375 0.235 1.42 -0.0625 0 1.41 -0.145 0 0.925 0.08 -0.087 1.19 -0.09 0.087 1.19 -0.09 0.172 1.32 -0.03 -0.172 1.32 -0.03 0.15 1.23 -0.015 -0.15 1.23 -0.015 0.079 0.92 -0.14 0.1 0.9 0.077 -0.079 0.92 -0.14 -0.1 0.9 0.075 0 0.87 0 0.171 0.65 0 0.02 0.65 0 0.1 0.65 -0.08 0.1 0.65 0.07 -0.171 0.65 0 -0.02 0.65 0 -0.1 0.65 -0.08 -0.1 0.65 0.07 0.25 1.27 -0.04 0.17 1.27 -0.04 0.2 1.27 -0.09 0.2 1.27 0.02 0.244 1.1388 -0.04 0.165 1.1388 -0.04 0.2 1.1388 -0.08 0.2 1.1388 -0.013 0.225 1 -0.01 0.225 1 -0.07 0.185 1 -0.01 0.185 1 -0.07 0.2 1.1388 -0.04 0.225 0.92 -0.04 0.175 0.92 -0.04 0.2 0.92 -0.065 0.2 0.92 -0.015 0.225 0.89 -0.04 0.175 0.89 -0.04 0.2 0.89 -0.065 0.2 0.89 -0.015 0.218 0.86 -0.04 0.184 0.86 -0.04 0.2 0.87 -0.07 0.2 0.87 0 0.21 0.85 0 0.1854 0.85 0 0.212 0.84 -0.015 0.183 0.84 -0.015 0.213 0.835 -0.04 0.19 0.835 -0.04 0.211 0.835 -0.065 0.192 0.835 -0.065 0.208 0.84 -0.085 0.19 0.84 -0.085 0.2 0.84 -0.095 0.215 0.82 0 0.193 0.815 0.005 0.198 0.8 0.012 0.21 0.82 0.03 0.19 0.82 0.03 0.2 0.835 0.039 0.212 0.8 0.05 0.188 0.8 0.05 0.2 0.807 0.057 0.2 0.793 0.035 0.2 0.774 0.076 0.212 0.78 0.07 0.188 0.78 0.07 0.2 0.785 0.075 0.2 0.77 0.062 0.215 0.793 -0.015 0.187 0.793 -0.015 0.2 0.793 -0.005 0.215 0.788 -0.04 0.187 0.788 -0.04 0.215 0.793 -0.065 0.187 0.793 -0.065 0.21 0.79 -0.085 0.19 0.79 -0.085 0.2 0.79 -0.095 0.19 0.77 -0.0275 0.19 0.77 -0.0525 0.19 0.78 -0.0775 0.212 0.745 -0.015 0.188 0.745 -0.02 0.2 0.745 -0.0255 0.2 0.745 -0.0045 0.211 0.72 -0.015 0.189 0.72 -0.015 0.2 0.72 -0.0252 0.2 0.72 -0.0048 0.21 0.695 -0.015 0.19 0.695 -0.015 0.2 0.695 -0.025 0.2 0.695 -0.005 0.2 0.685 -0.015 0.215 0.74 -0.04 0.185 0.74 -0.04 0.2 0.74 -0.055 0.2 0.74 -0.025 0.21 0.7142 -0.04 0.19 0.7142 -0.04 0.2 0.7142 -0.053 0.2 0.7142 -0.027 0.21 0.68 -0.04 0.19 0.68 -0.04 0.2 0.68 -0.05 0.2 0.68 -0.03 0.2 0.67 -0.04 0.212 0.74 -0.065 0.188 0.74 -0.065 0.2 0.74 -0.0756 0.2 0.74 -0.0542 0.21 0.7177 -0.065 0.19 0.7177 -0.065 0.2 0.7177 -0.0751 0.2 0.7177 -0.0549 0.21 0.695 -0.065 0.19 0.695 -0.065 0.2 0.695 -0.075 0.2 0.695 -0.055 0.2 0.685 -0.065 0.211 0.755 -0.085 0.189 0.755 -0.085 0.2 0.755 -0.0952 0.2 0.755 -0.0748 0.21 0.735 -0.085 0.19 0.735 -0.085 0.2 0.735 -0.0951 0.2 0.735 -0.0749 0.21 0.72 -0.085 0.19 0.72 -0.085 0.2 0.72 -0.095 0.2 0.72 -0.075 0.2 0.71 -0.085 -0.23 1.23 -0.04 -0.16 1.23 -0.04 -0.2 1.235 -0.105 -0.2 1.235 0.02 -0.244 1.1388 -0.04 -0.165 1.1388 -0.04 -0.2 1.1388 -0.08 -0.2 1.1388 0.013 -0.225 1 -0.01 -0.225 1 -0.07 -0.185 1 -0.01 -0.185 1 -0.07 -0.2 1.1388 -0.04 -0.225 0.92 -0.04 -0.175 0.92 -0.04 -0.2 0.92 -0.065 -0.2 0.92 -0.015 -0.225 0.89 -0.04 -0.175 0.89 -0.04 -0.2 0.89 -0.065 -0.2 0.89 -0.015 -0.218 0.86 -0.04 -0.184 0.86 -0.04 -0.2 0.87 -0.07 -0.2 0.87 0 -0.21 0.85 0 -0.1854 0.85 0 -0.212 0.84 -0.015 -0.183 0.84 -0.015 -0.213 0.835 -0.04 -0.19 0.835 -0.04 -0.211 0.835 -0.065 -0.192 0.835 -0.065 -0.208 0.84 -0.085 -0.19 0.84 -0.085 -0.2 0.84 -0.095 -0.215 0.82 0 -0.193 0.815 0.005 -0.198 0.8 0.012 -0.21 0.82 0.03 -0.19 0.82 0.03 -0.2 0.835 0.039 -0.212 0.8 0.05 -0.188 0.8 0.05 -0.2 0.807 0.057 -0.2 0.793 0.035 -0.2 0.774 0.076 -0.212 0.78 0.07 -0.188 0.78 0.07 -0.2 0.785 0.075 -0.2 0.77 0.062 -0.215 0.793 -0.015 -0.187 0.793 -0.015 -0.2 0.793 -0.005 -0.215 0.788 -0.04 -0.187 0.788 -0.04 -0.215 0.793 -0.065 -0.187 0.793 -0.065 -0.21 0.79 -0.085 -0.19 0.79 -0.085 -0.2 0.79 -0.095 -0.19 0.77 -0.0275 -0.19 0.77 -0.0525 -0.19 0.78 -0.0775 -0.212 0.745 -0.015 -0.188 0.745 -0.02 -0.2 0.745 -0.0255 -0.2 0.745 -0.0045 -0.211 0.72 -0.015 -0.189 0.72 -0.015 -0.2 0.72 -0.0252 -0.2 0.72 -0.0048 -0.21 0.695 -0.015 -0.19 0.695 -0.015 -0.2 0.695 -0.025 -0.2 0.695 -0.005 -0.2 0.685 -0.015 -0.215 0.74 -0.04 -0.185 0.74 -0.04 -0.2 0.74 -0.055 -0.2 0.74 -0.025 -0.21 0.7142 -0.04 -0.19 0.7142 -0.04 -0.2 0.7142 -0.053 -0.2 0.7142 -0.027 -0.21 0.68 -0.04 -0.19 0.68 -0.04 -0.2 0.68 -0.05 -0.2 0.68 -0.03 -0.2 0.67 -0.04 -0.212 0.74 -0.065 -0.188 0.74 -0.065 -0.2 0.74 -0.0756 -0.2 0.74 -0.0542 -0.21 0.7177 -0.065 -0.19 0.7177 -0.065 -0.2 0.7177 -0.0751 -0.2 0.7177 -0.0549 -0.21 0.695 -0.065 -0.19 0.695 -0.065 -0.2 0.695 -0.075 -0.2 0.695 -0.055 -0.2 0.685 -0.065 -0.211 0.755 -0.085 -0.189 0.755 -0.085 -0.2 0.755 -0.0952 -0.2 0.755 -0.0748 -0.21 0.735 -0.085 -0.19 0.735 -0.085 -0.2 0.735 -0.0951 -0.2 0.735 -0.0749 -0.21 0.72 -0.085 -0.19 0.72 -0.085 -0.2 0.72 -0.095 -0.2 0.72 -0.075 -0.2 0.71 -0.085 0.115 0.466 0.06 0.115 0.466 -0.055 0.15 0.466 0 0.05 0.466 0 0.17 0.3 0 0.06 0.3 0 0.1 0.3 -0.05 0.1 0.3 0.05 0.15 0.07 0 0.085 0.086 0.0125 0.115 0.069 -0.045 0.117 0.0975 0.0615 0.1375 0.006 -0.03 0.095 0.006 -0.03 0.115 0.015 -0.045 0.115 0.06 0.1 0.115 0 0.07 0.165 0 0.07 0.095 0 0.07 0.115 0.04 0.13 0.125 0 0.12 0.165 0 0.12 0.087 0 0.122 0.09 0.012 0.188 0.11 0.011 0.19 0.128 0.011 0.185 0.142 0.011 0.178 0.154 0.01 0.168 -0.115 0.466 0.06 -0.115 0.466 -0.055 -0.17 0.466 0 -0.05 0.466 0 -0.17 0.3 0 -0.06 0.3 0 -0.1 0.3 -0.05 -0.1 0.3 0.05 -0.15 0.07 0 -0.085 0.086 0.0125 -0.115 0.069 -0.045 -0.117 0.0975 0.0615 -0.1375 0.006 -0.03 -0.095 0.006 -0.03 -0.095 0.006 -0.03 -0.115 0.06 0.1 -0.115 0 0.07 -0.165 0 0.07 -0.095 0 0.07 -0.115 0.04 0.13 -0.125 0 0.12 -0.165 0 0.12 -0.087 0 0.122 -0.09 0.012 0.188 -0.11 0.011 0.19 -0.128 0.011 0.185 -0.142 0.011 0.178 -0.154 0.01 0.168'/> |
| 1855 | </IndexedFaceSet> |
| 1856 | </Shape> |
| 1857 | <Coordinate USE='TheSkinCoord' containerField='skinCoord'/> |
| 1858 | <HAnimJoint USE='Joe_humanoid_root' containerField='joints'/> |
| 1859 | <HAnimJoint USE='Joe_sacroiliac' containerField='joints'/> |
| 1860 | <HAnimJoint USE='Joe_vl5' containerField='joints'/> |
| 1861 | <HAnimJoint USE='Joe_vl4' containerField='joints'/> |
| 1862 | <HAnimJoint USE='Joe_vl3' containerField='joints'/> |
| 1863 | <HAnimJoint USE='Joe_vl2' containerField='joints'/> |
| 1864 | <HAnimJoint USE='Joe_vl1' containerField='joints'/> |
| 1865 | <HAnimJoint USE='Joe_vt12' containerField='joints'/> |
| 1866 | <HAnimJoint USE='Joe_vt11' containerField='joints'/> |
| 1867 | <HAnimJoint USE='Joe_vt10' containerField='joints'/> |
| 1868 | <HAnimJoint USE='Joe_vt9' containerField='joints'/> |
| 1869 | <HAnimJoint USE='Joe_vt8' containerField='joints'/> |
| 1870 | <HAnimJoint USE='Joe_vt7' containerField='joints'/> |
| 1871 | <HAnimJoint USE='Joe_vt6' containerField='joints'/> |
| 1872 | <HAnimJoint USE='Joe_vt5' containerField='joints'/> |
| 1873 | <HAnimJoint USE='Joe_vt4' containerField='joints'/> |
| 1874 | <HAnimJoint USE='Joe_vt3' containerField='joints'/> |
| 1875 | <HAnimJoint USE='Joe_vt2' containerField='joints'/> |
| 1876 | <HAnimJoint USE='Joe_vt1' containerField='joints'/> |
| 1877 | <HAnimJoint USE='Joe_vc7' containerField='joints'/> |
| 1878 | <HAnimJoint USE='Joe_vc6' containerField='joints'/> |
| 1879 | <HAnimJoint USE='Joe_vc5' containerField='joints'/> |
| 1880 | <HAnimJoint USE='Joe_vc4' containerField='joints'/> |
| 1881 | <HAnimJoint USE='Joe_vc3' containerField='joints'/> |
| 1882 | <HAnimJoint USE='Joe_vc2' containerField='joints'/> |
| 1883 | <HAnimJoint USE='Joe_vc1' containerField='joints'/> |
| 1884 | <HAnimJoint USE='Joe_skullbase' containerField='joints'/> |
| 1885 | <HAnimJoint USE='Joe_l_acromioclavicular' containerField='joints'/> |
| 1886 | <HAnimJoint USE='Joe_r_acromioclavicular' containerField='joints'/> |
| 1887 | <HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_2' containerField='joints'/> |
| 1888 | <HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_2' containerField='joints'/> |
| 1889 | <HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_3' containerField='joints'/> |
| 1890 | <HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_3' containerField='joints'/> |
| 1891 | <HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_4' containerField='joints'/> |
| 1892 | <HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_4' containerField='joints'/> |
| 1893 | <HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_5' containerField='joints'/> |
| 1894 | <HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_5' containerField='joints'/> |
| 1895 | <HAnimJoint USE='Joe_l_carpal_interphalangeal_1' containerField='joints'/> |
| 1896 | <HAnimJoint USE='Joe_r_carpal_interphalangeal_1' containerField='joints'/> |
| 1897 | <HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_2' containerField='joints'/> |
| 1898 | <HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_2' containerField='joints'/> |
| 1899 | <HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_3' containerField='joints'/> |
| 1900 | <HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_3' containerField='joints'/> |
| 1901 | <HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_4' containerField='joints'/> |
| 1902 | <HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_4' containerField='joints'/> |
| 1903 | <HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_5' containerField='joints'/> |
| 1904 | <HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_5' containerField='joints'/> |
| 1905 | <HAnimJoint USE='Joe_l_carpometacarpal_1' containerField='joints'/> |
| 1906 | <HAnimJoint USE='Joe_r_carpometacarpal_1' containerField='joints'/> |
| 1907 | <HAnimJoint USE='Joe_l_carpometacarpal_2' containerField='joints'/> |
| 1908 | <HAnimJoint USE='Joe_r_carpometacarpal_2' containerField='joints'/> |
| 1909 | <HAnimJoint USE='Joe_l_carpometacarpal_3' containerField='joints'/> |
| 1910 | <HAnimJoint USE='Joe_r_carpometacarpal_3' containerField='joints'/> |
| 1911 | <HAnimJoint USE='Joe_l_carpometacarpal_4' containerField='joints'/> |
| 1912 | <HAnimJoint USE='Joe_r_carpometacarpal_4' containerField='joints'/> |
| 1913 | <HAnimJoint USE='Joe_l_carpometacarpal_5' containerField='joints'/> |
| 1914 | <HAnimJoint USE='Joe_r_carpometacarpal_5' containerField='joints'/> |
| 1915 | <HAnimJoint USE='Joe_l_elbow' containerField='joints'/> |
| 1916 | <HAnimJoint USE='Joe_r_elbow' containerField='joints'/> |
| 1917 | <HAnimJoint USE='Joe_l_eyeball_joint' containerField='joints'/> |
| 1918 | <HAnimJoint USE='Joe_r_eyeball_joint' containerField='joints'/> |
| 1919 | <HAnimJoint USE='Joe_l_hip' containerField='joints'/> |
| 1920 | <HAnimJoint USE='Joe_r_hip' containerField='joints'/> |
| 1921 | <HAnimJoint USE='Joe_l_knee' containerField='joints'/> |
| 1922 | <HAnimJoint USE='Joe_r_knee' containerField='joints'/> |
| 1923 | <HAnimJoint USE='Joe_l_metacarpophalangeal_1' containerField='joints'/> |
| 1924 | <HAnimJoint USE='Joe_r_metacarpophalangeal_1' containerField='joints'/> |
| 1925 | <HAnimJoint USE='Joe_l_metacarpophalangeal_2' containerField='joints'/> |
| 1926 | <HAnimJoint USE='Joe_r_metacarpophalangeal_2' containerField='joints'/> |
| 1927 | <HAnimJoint USE='Joe_l_metacarpophalangeal_3' containerField='joints'/> |
| 1928 | <HAnimJoint USE='Joe_r_metacarpophalangeal_3' containerField='joints'/> |
| 1929 | <HAnimJoint USE='Joe_l_metacarpophalangeal_4' containerField='joints'/> |
| 1930 | <HAnimJoint USE='Joe_r_metacarpophalangeal_4' containerField='joints'/> |
| 1931 | <HAnimJoint USE='Joe_l_metacarpophalangeal_5' containerField='joints'/> |
| 1932 | <HAnimJoint USE='Joe_r_metacarpophalangeal_5' containerField='joints'/> |
| 1933 | <HAnimJoint USE='Joe_l_metatarsal' containerField='joints'/> |
| 1934 | <HAnimJoint USE='Joe_l_metatarsophalangeal_2' containerField='joints'/> |
| 1935 | <HAnimJoint USE='Joe_r_metatarsophalangeal_2' containerField='joints'/> |
| 1936 | <HAnimJoint USE='Joe_l_radiocarpal' containerField='joints'/> |
| 1937 | <HAnimJoint USE='Joe_r_radiocarpal' containerField='joints'/> |
| 1938 | <HAnimJoint USE='Joe_l_shoulder' containerField='joints'/> |
| 1939 | <HAnimJoint USE='Joe_r_shoulder' containerField='joints'/> |
| 1940 | <HAnimJoint USE='Joe_l_sternoclavicular' containerField='joints'/> |
| 1941 | <HAnimJoint USE='Joe_r_sternoclavicular' containerField='joints'/> |
| 1942 | <HAnimJoint USE='Joe_l_talocrural' containerField='joints'/> |
| 1943 | <HAnimJoint USE='Joe_r_talocrural' containerField='joints'/> |
| 1944 | <HAnimJoint USE='Joe_r_tarsal_distal_interphalangeal_2' containerField='joints'/> |
| 1945 | <HAnimJoint USE='Joe_l_tarsometatarsal_2' containerField='joints'/> |
| 1946 | <HAnimJoint USE='Joe_r_tarsometatarsal_2' containerField='joints'/> |
| 1947 | <HAnimSegment USE='Joe_c1' containerField='segments'/> |
| 1948 | <HAnimSegment USE='Joe_c2' containerField='segments'/> |
| 1949 | <HAnimSegment USE='Joe_c3' containerField='segments'/> |
| 1950 | <HAnimSegment USE='Joe_c4' containerField='segments'/> |
| 1951 | <HAnimSegment USE='Joe_c5' containerField='segments'/> |
| 1952 | <HAnimSegment USE='Joe_c6' containerField='segments'/> |
| 1953 | <HAnimSegment USE='Joe_c7' containerField='segments'/> |
| 1954 | <HAnimSegment USE='Joe_l1' containerField='segments'/> |
| 1955 | <HAnimSegment USE='Joe_l2' containerField='segments'/> |
| 1956 | <HAnimSegment USE='Joe_l3' containerField='segments'/> |
| 1957 | <HAnimSegment USE='Joe_l4' containerField='segments'/> |
| 1958 | <HAnimSegment USE='Joe_l5' containerField='segments'/> |
| 1959 | <HAnimSegment USE='Joe_pelvis' containerField='segments'/> |
| 1960 | <HAnimSegment USE='Joe_sacrum' containerField='segments'/> |
| 1961 | <HAnimSegment USE='Joe_skull' containerField='segments'/> |
| 1962 | <HAnimSegment USE='Joe_t1' containerField='segments'/> |
| 1963 | <HAnimSegment USE='Joe_t10' containerField='segments'/> |
| 1964 | <HAnimSegment USE='Joe_t11' containerField='segments'/> |
| 1965 | <HAnimSegment USE='Joe_t12' containerField='segments'/> |
| 1966 | <HAnimSegment USE='Joe_t2' containerField='segments'/> |
| 1967 | <HAnimSegment USE='Joe_t3' containerField='segments'/> |
| 1968 | <HAnimSegment USE='Joe_t4' containerField='segments'/> |
| 1969 | <HAnimSegment USE='Joe_t5' containerField='segments'/> |
| 1970 | <HAnimSegment USE='Joe_t6' containerField='segments'/> |
| 1971 | <HAnimSegment USE='Joe_t7' containerField='segments'/> |
| 1972 | <HAnimSegment USE='Joe_t8' containerField='segments'/> |
| 1973 | <HAnimSegment USE='Joe_t9' containerField='segments'/> |
| 1974 | <HAnimSegment USE='Joe_toPelvis' containerField='segments'/> |
| 1975 | <HAnimSegment USE='Joe_l_calf' containerField='segments'/> |
| 1976 | <HAnimSegment USE='Joe_r_calf' containerField='segments'/> |
| 1977 | <HAnimSegment USE='Joe_l_carpal' containerField='segments'/> |
| 1978 | <HAnimSegment USE='Joe_r_carpal' containerField='segments'/> |
| 1979 | <HAnimSegment USE='Joe_l_carpal_distal_phalanx_1' containerField='segments'/> |
| 1980 | <HAnimSegment USE='Joe_r_carpal_distal_phalanx_1' containerField='segments'/> |
| 1981 | <HAnimSegment USE='Joe_l_carpal_distal_phalanx_2' containerField='segments'/> |
| 1982 | <HAnimSegment USE='Joe_r_carpal_distal_phalanx_2' containerField='segments'/> |
| 1983 | <HAnimSegment USE='Joe_l_carpal_distal_phalanx_3' containerField='segments'/> |
| 1984 | <HAnimSegment USE='Joe_r_carpal_distal_phalanx_3' containerField='segments'/> |
| 1985 | <HAnimSegment USE='Joe_l_carpal_distal_phalanx_4' containerField='segments'/> |
| 1986 | <HAnimSegment USE='Joe_r_carpal_distal_phalanx_4' containerField='segments'/> |
| 1987 | <HAnimSegment USE='Joe_l_carpal_distal_phalanx_5' containerField='segments'/> |
| 1988 | <HAnimSegment USE='Joe_r_carpal_distal_phalanx_5' containerField='segments'/> |
| 1989 | <HAnimSegment USE='Joe_l_carpal_middle_phalanx_2' containerField='segments'/> |
| 1990 | <HAnimSegment USE='Joe_r_carpal_middle_phalanx_2' containerField='segments'/> |
| 1991 | <HAnimSegment USE='Joe_l_carpal_middle_phalanx_3' containerField='segments'/> |
| 1992 | <HAnimSegment USE='Joe_r_carpal_middle_phalanx_3' containerField='segments'/> |
| 1993 | <HAnimSegment USE='Joe_l_carpal_middle_phalanx_4' containerField='segments'/> |
| 1994 | <HAnimSegment USE='Joe_r_carpal_middle_phalanx_4' containerField='segments'/> |
| 1995 | <HAnimSegment USE='Joe_l_carpal_middle_phalanx_5' containerField='segments'/> |
| 1996 | <HAnimSegment USE='Joe_r_carpal_middle_phalanx_5' containerField='segments'/> |
| 1997 | <HAnimSegment USE='Joe_l_carpal_proximal_phalanx_1' containerField='segments'/> |
| 1998 | <HAnimSegment USE='Joe_r_carpal_proximal_phalanx_1' containerField='segments'/> |
| 1999 | <HAnimSegment USE='Joe_l_carpal_proximal_phalanx_2' containerField='segments'/> |
| 2000 | <HAnimSegment USE='Joe_r_carpal_proximal_phalanx_2' containerField='segments'/> |
| 2001 | <HAnimSegment USE='Joe_l_carpal_proximal_phalanx_3' containerField='segments'/> |
| 2002 | <HAnimSegment USE='Joe_r_carpal_proximal_phalanx_3' containerField='segments'/> |
| 2003 | <HAnimSegment USE='Joe_l_carpal_proximal_phalanx_4' containerField='segments'/> |
| 2004 | <HAnimSegment USE='Joe_r_carpal_proximal_phalanx_4' containerField='segments'/> |
| 2005 | <HAnimSegment USE='Joe_l_carpal_proximal_phalanx_5' containerField='segments'/> |
| 2006 | <HAnimSegment USE='Joe_r_carpal_proximal_phalanx_5' containerField='segments'/> |
| 2007 | <HAnimSegment USE='Joe_l_clavicle' containerField='segments'/> |
| 2008 | <HAnimSegment USE='Joe_r_clavicle' containerField='segments'/> |
| 2009 | <HAnimSegment USE='Joe_l_eyeball' containerField='segments'/> |
| 2010 | <HAnimSegment USE='Joe_r_eyeball' containerField='segments'/> |
| 2011 | <HAnimSegment USE='Joe_l_forearm' containerField='segments'/> |
| 2012 | <HAnimSegment USE='Joe_r_forearm' containerField='segments'/> |
| 2013 | <HAnimSegment USE='Joe_l_metacarpal_1' containerField='segments'/> |
| 2014 | <HAnimSegment USE='Joe_r_metacarpal_1' containerField='segments'/> |
| 2015 | <HAnimSegment USE='Joe_l_metacarpal_2' containerField='segments'/> |
| 2016 | <HAnimSegment USE='Joe_r_metacarpal_2' containerField='segments'/> |
| 2017 | <HAnimSegment USE='Joe_l_metacarpal_3' containerField='segments'/> |
| 2018 | <HAnimSegment USE='Joe_r_metacarpal_3' containerField='segments'/> |
| 2019 | <HAnimSegment USE='Joe_l_metacarpal_4' containerField='segments'/> |
| 2020 | <HAnimSegment USE='Joe_r_metacarpal_4' containerField='segments'/> |
| 2021 | <HAnimSegment USE='Joe_l_metacarpal_5' containerField='segments'/> |
| 2022 | <HAnimSegment USE='Joe_r_metacarpal_5' containerField='segments'/> |
| 2023 | <HAnimSegment USE='Joe_l_metatarsal_2' containerField='segments'/> |
| 2024 | <HAnimSegment USE='Joe_r_metatarsal_2' containerField='segments'/> |
| 2025 | <HAnimSegment USE='Joe_l_scapula' containerField='segments'/> |
| 2026 | <HAnimSegment USE='Joe_r_scapula' containerField='segments'/> |
| 2027 | <HAnimSegment USE='Joe_l_talus' containerField='segments'/> |
| 2028 | <HAnimSegment USE='Joe_r_talus' containerField='segments'/> |
| 2029 | <HAnimSegment USE='Joe_l_tarsal_distal_phalanx_2' containerField='segments'/> |
| 2030 | <HAnimSegment USE='Joe_r_tarsal_distal_phalanx_2' containerField='segments'/> |
| 2031 | <HAnimSegment USE='Joe_l_tarsal_proximal_phalanx_2' containerField='segments'/> |
| 2032 | <HAnimSegment USE='Joe_r_tarsal_proximal_phalanx_2' containerField='segments'/> |
| 2033 | <HAnimSegment USE='Joe_l_thigh' containerField='segments'/> |
| 2034 | <HAnimSegment USE='Joe_r_thigh' containerField='segments'/> |
| 2035 | <HAnimSegment USE='Joe_l_upperarm' containerField='segments'/> |
| 2036 | <HAnimSegment USE='Joe_r_upperarm' containerField='segments'/> |
| 2037 | <HAnimSite USE='Joe_cervicale_pt' containerField='sites'/> |
| 2038 | <HAnimSite USE='Joe_crotch_pt' containerField='sites'/> |
| 2039 | <HAnimSite USE='Joe_floormarker_pt' containerField='sites'/> |
| 2040 | <HAnimSite USE='Joe_navel_pt' containerField='sites'/> |
| 2041 | <HAnimSite USE='Joe_nuchale_pt' containerField='sites'/> |
| 2042 | <HAnimSite USE='Joe_rib10_midspine_pt' containerField='sites'/> |
| 2043 | <HAnimSite USE='Joe_sellion_pt' containerField='sites'/> |
| 2044 | <HAnimSite USE='Joe_skull_vertex_tip' containerField='sites'/> |
| 2045 | <HAnimSite USE='Joe_substernale_pt' containerField='sites'/> |
| 2046 | <HAnimSite USE='Joe_supramenton_pt' containerField='sites'/> |
| 2047 | <HAnimSite USE='Joe_suprasternale_pt' containerField='sites'/> |
| 2048 | <HAnimSite USE='Joe_waist_preferred_posterior_pt' containerField='sites'/> |
| 2049 | <HAnimSite USE='Joe_l_acromion_pt' containerField='sites'/> |
| 2050 | <HAnimSite USE='Joe_r_acromion_pt' containerField='sites'/> |
| 2051 | <HAnimSite USE='Joe_l_asis_pt' containerField='sites'/> |
| 2052 | <HAnimSite USE='Joe_r_asis_pt' containerField='sites'/> |
| 2053 | <HAnimSite USE='Joe_l_axilla_distal_pt' containerField='sites'/> |
| 2054 | <HAnimSite USE='Joe_r_axilla_distal_pt' containerField='sites'/> |
| 2055 | <HAnimSite USE='Joe_l_axilla_proximal_pt' containerField='sites'/> |
| 2056 | <HAnimSite USE='Joe_r_axilla_proximal_pt' containerField='sites'/> |
| 2057 | <HAnimSite USE='Joe_l_calcaneus_posterior_pt' containerField='sites'/> |
| 2058 | <HAnimSite USE='Joe_r_calcaneus_posterior_pt' containerField='sites'/> |
| 2059 | <HAnimSite USE='Joe_l_carpal_distal_phalanx_1_tip' containerField='sites'/> |
| 2060 | <HAnimSite USE='Joe_r_carpal_distal_phalanx_1_tip' containerField='sites'/> |
| 2061 | <HAnimSite USE='Joe_l_carpal_distal_phalanx_2_tip' containerField='sites'/> |
| 2062 | <HAnimSite USE='Joe_r_carpal_distal_phalanx_2_tip' containerField='sites'/> |
| 2063 | <HAnimSite USE='Joe_l_carpal_distal_phalanx_3_tip' containerField='sites'/> |
| 2064 | <HAnimSite USE='Joe_r_carpal_distal_phalanx_3_tip' containerField='sites'/> |
| 2065 | <HAnimSite USE='Joe_l_carpal_distal_phalanx_4_tip' containerField='sites'/> |
| 2066 | <HAnimSite USE='Joe_r_carpal_distal_phalanx_4_tip' containerField='sites'/> |
| 2067 | <HAnimSite USE='Joe_l_carpal_distal_phalanx_5_tip' containerField='sites'/> |
| 2068 | <HAnimSite USE='Joe_r_carpal_distal_phalanx_5_tip' containerField='sites'/> |
| 2069 | <HAnimSite USE='Joe_l_clavicle_pt' containerField='sites'/> |
| 2070 | <HAnimSite USE='Joe_r_clavicle_pt' containerField='sites'/> |
| 2071 | <HAnimSite USE='Joe_l_dactylion_pt' containerField='sites'/> |
| 2072 | <HAnimSite USE='Joe_r_dactylion_pt' containerField='sites'/> |
| 2073 | <HAnimSite USE='Joe_l_femoral_lateral_epicondyle_pt' containerField='sites'/> |
| 2074 | <HAnimSite USE='Joe_r_femoral_lateral_epicondyle_pt' containerField='sites'/> |
| 2075 | <HAnimSite USE='Joe_l_femoral_medial_epicondyle_pt' containerField='sites'/> |
| 2076 | <HAnimSite USE='Joe_r_femoral_medial_epicondyle_pt' containerField='sites'/> |
| 2077 | <HAnimSite USE='Joe_l_gonion_pt' containerField='sites'/> |
| 2078 | <HAnimSite USE='Joe_r_gonion_pt' containerField='sites'/> |
| 2079 | <HAnimSite USE='Joe_l_humeral_lateral_epicondyle_pt' containerField='sites'/> |
| 2080 | <HAnimSite USE='Joe_r_humeral_lateral_epicondyle_pt' containerField='sites'/> |
| 2081 | <HAnimSite USE='Joe_l_humeral_medial_epicondyle_pt' containerField='sites'/> |
| 2082 | <HAnimSite USE='Joe_r_humeral_medial_epicondyle_pt' containerField='sites'/> |
| 2083 | <HAnimSite USE='Joe_l_iliocristale_pt' containerField='sites'/> |
| 2084 | <HAnimSite USE='Joe_r_iliocristale_pt' containerField='sites'/> |
| 2085 | <HAnimSite USE='Joe_l_infraorbitale_pt' containerField='sites'/> |
| 2086 | <HAnimSite USE='Joe_r_infraorbitale_pt' containerField='sites'/> |
| 2087 | <HAnimSite USE='Joe_l_knee_crease_pt' containerField='sites'/> |
| 2088 | <HAnimSite USE='Joe_r_knee_crease_pt' containerField='sites'/> |
| 2089 | <HAnimSite USE='Joe_l_lateral_malleolus_pt' containerField='sites'/> |
| 2090 | <HAnimSite USE='Joe_r_lateral_malleolus_pt' containerField='sites'/> |
| 2091 | <HAnimSite USE='Joe_l_medial_malleolus_pt' containerField='sites'/> |
| 2092 | <HAnimSite USE='Joe_r_medial_malleolus_pt' containerField='sites'/> |
| 2093 | <HAnimSite USE='Joe_l_metacarpal_phalanx_2_pt' containerField='sites'/> |
| 2094 | <HAnimSite USE='Joe_r_metacarpal_phalanx_2_pt' containerField='sites'/> |
| 2095 | <HAnimSite USE='Joe_l_metacarpal_phalanx_5_pt' containerField='sites'/> |
| 2096 | <HAnimSite USE='Joe_r_metacarpal_phalanx_5_pt' containerField='sites'/> |
| 2097 | <HAnimSite USE='Joe_l_metatarsal_phalanx_1_pt' containerField='sites'/> |
| 2098 | <HAnimSite USE='Joe_r_metatarsal_phalanx_1_pt' containerField='sites'/> |
| 2099 | <HAnimSite USE='Joe_l_metatarsal_phalanx_5_pt' containerField='sites'/> |
| 2100 | <HAnimSite USE='Joe_r_metatarsal_phalanx_5_pt' containerField='sites'/> |
| 2101 | <HAnimSite USE='Joe_l_neck_base_pt' containerField='sites'/> |
| 2102 | <HAnimSite USE='Joe_r_neck_base_pt' containerField='sites'/> |
| 2103 | <HAnimSite USE='Joe_l_olecranon_pt' containerField='sites'/> |
| 2104 | <HAnimSite USE='Joe_r_olecranon_pt' containerField='sites'/> |
| 2105 | <HAnimSite USE='Joe_l_psis_pt' containerField='sites'/> |
| 2106 | <HAnimSite USE='Joe_r_psis_pt' containerField='sites'/> |
| 2107 | <HAnimSite USE='Joe_l_radial_styloid_pt' containerField='sites'/> |
| 2108 | <HAnimSite USE='Joe_r_radial_styloid_pt' containerField='sites'/> |
| 2109 | <HAnimSite USE='Joe_l_radiale_pt' containerField='sites'/> |
| 2110 | <HAnimSite USE='Joe_r_radiale_pt' containerField='sites'/> |
| 2111 | <HAnimSite USE='Joe_l_rib10_pt' containerField='sites'/> |
| 2112 | <HAnimSite USE='Joe_r_rib10_pt' containerField='sites'/> |
| 2113 | <HAnimSite USE='Joe_l_sphyrion_pt' containerField='sites'/> |
| 2114 | <HAnimSite USE='Joe_r_sphyrion_pt' containerField='sites'/> |
| 2115 | <HAnimSite USE='Joe_l_tarsal_distal_phalanx_2_pt' containerField='sites'/> |
| 2116 | <HAnimSite USE='Joe_r_tarsal_distal_phalanx_2_pt' containerField='sites'/> |
| 2117 | <HAnimSite USE='Joe_l_thelion_pt' containerField='sites'/> |
| 2118 | <HAnimSite USE='Joe_r_thelion_pt' containerField='sites'/> |
| 2119 | <HAnimSite USE='Joe_l_tragion_pt' containerField='sites'/> |
| 2120 | <HAnimSite USE='Joe_r_tragion_pt' containerField='sites'/> |
| 2121 | <HAnimSite USE='Joe_l_trochanterion_pt' containerField='sites'/> |
| 2122 | <HAnimSite USE='Joe_r_trochanterion_pt' containerField='sites'/> |
| 2123 | <HAnimSite USE='Joe_l_ulnar_styloid_pt' containerField='sites'/> |
| 2124 | <HAnimSite USE='Joe_r_ulnar_styloid_pt' containerField='sites'/> |
| 2125 | </HAnimHumanoid> |
| 2126 | </Group> |
| 2127 | </Group> |
| 2128 |
<!-- ROUTE information for Time1 node:
[from fraction_changed to HUMANOIDROOT_POSITION_ANIMATOR.set_fraction
]
[from fraction_changed to HUMANOIDROOT_ANIMATOR.set_fraction
]
[from fraction_changed to L_HIP_ANIMATOR.set_fraction
]
[from fraction_changed to L_KNEE_ANIMATOR.set_fraction
]
[from fraction_changed to L_ANKLE_ANIMATOR.set_fraction
]
[from fraction_changed to L_subtalar_ANIMATOR.set_fraction
]
[from fraction_changed to L_MIDTARSAL_ANIMATOR.set_fraction
]
[from fraction_changed to L_metatarsal_ANIMATOR.set_fraction
]
[from fraction_changed to R_HIP_ANIMATOR.set_fraction
]
[from fraction_changed to R_KNEE_ANIMATOR.set_fraction
]
[from fraction_changed to R_ANKLE_ANIMATOR.set_fraction
]
[from fraction_changed to R_subtalar_ANIMATOR.set_fraction
]
[from fraction_changed to R_MIDTARSAL_ANIMATOR.set_fraction
]
[from fraction_changed to R_metatarsal_ANIMATOR.set_fraction
]
[from fraction_changed to VL5_ANIMATOR.set_fraction
]
[from fraction_changed to SKULLBASE_ANIMATOR.set_fraction
]
[from fraction_changed to L_SHOULDER_ANIMATOR.set_fraction
]
[from fraction_changed to L_ELBOW_ANIMATOR.set_fraction
]
[from fraction_changed to L_WRIST_ANIMATOR.set_fraction
]
-->
<TimeSensor DEF='Time1' cycleInterval='2.86' loop='true'/> |
| 2129 |
<!-- ROUTE information for Time2 node:
[from fraction_changed to vc6Yaw.set_fraction
]
[from fraction_changed to r_sternoclavicularRoll.set_fraction
]
[from fraction_changed to r_acromioclavicularRoll.set_fraction
]
[from fraction_changed to r_shoulderRoll.set_fraction
]
[from fraction_changed to r_ForeArmPitch.set_fraction
]
[from fraction_changed to r_wristRoll.set_fraction
]
[from fraction_changed to r_handPitch.set_fraction
]
[from fraction_changed to r_thumb1Pitch.set_fraction
]
[from fraction_changed to r_thumb2Pitch.set_fraction
]
-->
<TimeSensor DEF='Time2' cycleInterval='5.72' loop='true'/> |
| 2130 |
<!-- ROUTE information for Time3 node:
[from fraction_changed to EyeballsRotation.set_fraction
]
-->
<TimeSensor DEF='Time3' cycleInterval='5.8' loop='true'/> |
| 2131 |
<!-- ROUTE information for Pitch node:
[no input ROUTE found] [no output ROUTE found] --> <OrientationInterpolator DEF='Pitch' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 1.256 1 0 0 2.512 1 0 0 3.768 1 0 0 5.024 1 0 0 6.28'/> |
| 2132 |
<!-- ROUTE information for Yaw node:
[no input ROUTE found] [no output ROUTE found] --> <OrientationInterpolator DEF='Yaw' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 1 0 0 0 1 0 1.256 0 1 0 2.512 0 1 0 3.768 0 1 0 5.024 0 1 0 6.28'/> |
| 2133 |
<!-- ROUTE information for Roll node:
[no input ROUTE found] [no output ROUTE found] --> <OrientationInterpolator DEF='Roll' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 1.256 0 0 1 2.512 0 0 1 3.768 0 0 1 5.024 0 0 1 6.28'/> |
| 2134 |
<!-- ROUTE information for vc6Yaw node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_vc6.set_rotation
]
-->
<OrientationInterpolator DEF='vc6Yaw' key='0 0.2 0.4 0.5 0.6 0.7 0.8 0.9 1' keyValue='0 1 0 0 0 1 0 0.7 0 1 0 0 0 1 0 0 -1 0 0 0.5 -0.4 -1 0 0.7 -0.4 -1 0 0.4 0 1 0 0 0 1 0 0'/> |
| 2135 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='vc6Yaw' toField='set_fraction'/> |
| 2136 | < ROUTE fromNode='vc6Yaw' fromField='value_changed' toNode='Joe_vc6' toField='set_rotation'/> |
| 2137 |
<!-- ROUTE information for EyeballsRotation node:
[from Time3.fraction_changed to set_fraction
]
[from value_changed to Joe_r_eyeball_joint.set_rotation
]
[from value_changed to Joe_l_eyeball_joint.set_rotation
]
-->
<OrientationInterpolator DEF='EyeballsRotation' key='0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.2 0.2 0.2 0.2 -0.2 0.2 0.2 0.2 -0.2 -0.2 0.2 0.2 0.2 -0.2 0.2 0.2 -0.2 0.2 -0.2 0.2 -0.2 0.2 -0.2 0.2 0 0 1 0 0 0 1 0'/> |
| 2138 | < ROUTE fromNode='Time3' fromField='fraction_changed' toNode='EyeballsRotation' toField='set_fraction'/> |
| 2139 | < ROUTE fromNode='EyeballsRotation' fromField='value_changed' toNode='Joe_r_eyeball_joint' toField='set_rotation'/> |
| 2140 | < ROUTE fromNode='EyeballsRotation' fromField='value_changed' toNode='Joe_l_eyeball_joint' toField='set_rotation'/> |
| 2141 |
<!-- ROUTE information for r_sternoclavicularRelax node:
[from value_changed to Joe_r_sternoclavicular.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_sternoclavicularRelax' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.2 -1 0 0.11 0.2 -1 0 0.11 0.1 -1 0 0.1 0 0 1 0'/> |
| 2142 |
<!-- ROUTE information for r_acromioclavicularRelax node:
[from value_changed to Joe_r_acromioclavicular.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_acromioclavicularRelax' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 2143 |
<!-- ROUTE information for r_shoulderRelax node:
[from value_changed to Joe_r_shoulder.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_shoulderRelax' key='0 0.1 0.3 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.4 -0.7 -0.55 0.35 0.4 -0.7 -0.55 0.35 0.4 -0.7 -0.55 0.35 0 0 1 0'/> |
| 2144 |
<!-- ROUTE information for r_elbowRelax node:
[from value_changed to Joe_r_elbow.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_elbowRelax' key='0 0.15 0.4 0.6 0.9 1' keyValue='0 0 1 0 0 0 1 0 -0.2 0 0.01 0.5 -0.2 0 0.01 0.5 -0.2 0 0.01 0.5 0 0 1 0'/> |
| 2145 |
<!-- ROUTE information for r_wristRelax node:
[from value_changed to Joe_r_radiocarpal.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_wristRelax' key='0 0.2 0.4 0.6 0.9 1' keyValue='0 0 1 0 0 0 1 0 0 0.1 -0.09 0.25 0 0.1 -0.09 0.25 0 0.1 -0.09 0.25 0 0 1 0'/> |
| 2146 |
<!-- ROUTE information for r_index0Relax node:
[from value_changed to Joe_r_carpometacarpal_2.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_index0Relax' key='0 0.1 0.3 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 -0.25 0.25 -1 0.125 -0.25 0.25 -1 0.125 -0.25 0.25 -1 0.125 0 0 1 0'/> |
| 2147 |
<!-- ROUTE information for r_index1Relax node:
[from value_changed to Joe_r_metacarpophalangeal_2.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_index1Relax' key='0 0.1 0.2 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 -0.135 -0.135 1 0.357 -0.159 -0.153 1 0.355 -0.159 -0.153 1 0.357 0 0 1 0'/> |
| 2148 |
<!-- ROUTE information for r_middle0Relax node:
[from value_changed to Joe_r_carpometacarpal_3.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_middle0Relax' key='0 0.1 0.3 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 -1 0.14 0 0 -1 0.14 0 0 -1 0.14 0 0 1 0'/> |
| 2149 |
<!-- ROUTE information for r_middle1Relax node:
[from value_changed to Joe_r_metacarpophalangeal_3.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_middle1Relax' key='0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1' keyValue='0 0 1 0 0 0 1 0 0 0 0.3 0.257 0 0 0.3 0.37 0 0 0.3 0.39 0 0 0.3 0.31 0 0 0.3 0.32 0 0 0.3 0.34 0 0 0.3 0.28 0 0 1 0 0 0 1 0'/> |
| 2150 |
<!-- ROUTE information for r_ring0Relax node:
[from value_changed to Joe_r_carpometacarpal_4.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_ring0Relax' key='0 0.1 0.3 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.25 0.25 -1 0.1 0.25 0.25 -1 0.1 0.25 0.25 -1 0.1 0 0 1 0'/> |
| 2151 |
<!-- ROUTE information for r_ring1Relax node:
[from value_changed to Joe_r_metacarpophalangeal_4.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_ring1Relax' key='0 0.1 0.4 0.5 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.135 0.135 1 0.27 0.135 0.135 1 0.27 0.135 0.15 1 0.27 0 0 1 0'/> |
| 2152 |
<!-- ROUTE information for r_pinky0Relax node:
[from value_changed to Joe_r_carpometacarpal_5.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_pinky0Relax' key='0 0.1 0.3 0.5 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.35 0.35 -0.7 0.12 0.35 0.35 -0.9 0.12 0.35 0.35 -0.7 0.12 0 0 1 0'/> |
| 2153 |
<!-- ROUTE information for r_pinky1Relax node:
[from value_changed to Joe_r_metacarpophalangeal_5.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_pinky1Relax' key='0 0.1 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0.2 0.25 1 0.27 0.2 0.22 1 0.27 0.22 0.2 1 0.27 0 0 1 0'/> |
| 2154 |
<!-- ROUTE information for r_thumb1Relax node:
[from value_changed to Joe_r_carpometacarpal_1.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_thumb1Relax' key='0 0.03 0.08 0.2 0.3 0.4 0.5 0.8 0.95 1' keyValue='0 0 1 0 0 0 1 0 0 -1 1 1 0.5 -0.16 0.16 0.785 0.5 -0.16 0.16 0.785 1 1 1 0.75 1 1 1 0.75 1 1 1 0.75 1 1 1 0.75 0 0 1 0'/> |
| 2155 |
<!-- ROUTE information for r_thumb2Relax node:
[from value_changed to Joe_r_metacarpophalangeal_1.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_thumb2Relax' key='0 0.2 0.5 0.6 0.7 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0.45 1 0 0 0.45 1 0 0 0.45 0 0 1 0'/> |
| 2156 |
<!-- ROUTE information for r_thumb3Relax node:
[from value_changed to Joe_r_carpal_interphalangeal_1.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_thumb3Relax' key='0 0.2 0.5 0.6 0.7 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0.45 0 0 1 0 0 0 1 0'/> |
| 2157 |
<!-- ROUTE information for r_fingers2Relax node:
[from value_changed to Joe_r_carpal_proximal_interphalangeal_2.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_3.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_4.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_5.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_fingers2Relax' key='0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0.43 0 0 1 0.44 0 0 1 0.46 0 0 1 0.44 0 0 1 0.245 0 0 1 0.24 0 0 1 0.21 0 0 1 0.24 0 0 1 0'/> |
| 2158 |
<!-- ROUTE information for r_fingers3Relax node:
[from value_changed to Joe_r_carpal_distal_interphalangeal_2.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_3.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_4.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_5.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='r_fingers3Relax' key='0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0.37 0 0 1 0.38 0 0 1 0.39 0 0 1 0.38 0 0 1 0.27 0 0 1 0.28 0 0 1 0.27 0 0 1 0.28 0 0 1 0'/> |
| 2159 | < ROUTE fromNode='r_sternoclavicularRelax' fromField='value_changed' toNode='Joe_r_sternoclavicular' toField='set_rotation'/> |
| 2160 | < ROUTE fromNode='r_acromioclavicularRelax' fromField='value_changed' toNode='Joe_r_acromioclavicular' toField='set_rotation'/> |
| 2161 | < ROUTE fromNode='r_shoulderRelax' fromField='value_changed' toNode='Joe_r_shoulder' toField='set_rotation'/> |
| 2162 | < ROUTE fromNode='r_elbowRelax' fromField='value_changed' toNode='Joe_r_elbow' toField='set_rotation'/> |
| 2163 | < ROUTE fromNode='r_wristRelax' fromField='value_changed' toNode='Joe_r_radiocarpal' toField='set_rotation'/> |
| 2164 | < ROUTE fromNode='r_thumb1Relax' fromField='value_changed' toNode='Joe_r_carpometacarpal_1' toField='set_rotation'/> |
| 2165 | < ROUTE fromNode='r_thumb2Relax' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_1' toField='set_rotation'/> |
| 2166 | < ROUTE fromNode='r_thumb3Relax' fromField='value_changed' toNode='Joe_r_carpal_interphalangeal_1' toField='set_rotation'/> |
| 2167 | < ROUTE fromNode='r_index0Relax' fromField='value_changed' toNode='Joe_r_carpometacarpal_2' toField='set_rotation'/> |
| 2168 | < ROUTE fromNode='r_index1Relax' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_2' toField='set_rotation'/> |
| 2169 | < ROUTE fromNode='r_fingers2Relax' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_2' toField='set_rotation'/> |
| 2170 | < ROUTE fromNode='r_fingers3Relax' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_2' toField='set_rotation'/> |
| 2171 | < ROUTE fromNode='r_middle0Relax' fromField='value_changed' toNode='Joe_r_carpometacarpal_3' toField='set_rotation'/> |
| 2172 | < ROUTE fromNode='r_middle1Relax' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_3' toField='set_rotation'/> |
| 2173 | < ROUTE fromNode='r_fingers2Relax' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_3' toField='set_rotation'/> |
| 2174 | < ROUTE fromNode='r_fingers3Relax' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_3' toField='set_rotation'/> |
| 2175 | < ROUTE fromNode='r_ring0Relax' fromField='value_changed' toNode='Joe_r_carpometacarpal_4' toField='set_rotation'/> |
| 2176 | < ROUTE fromNode='r_ring1Relax' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_4' toField='set_rotation'/> |
| 2177 | < ROUTE fromNode='r_fingers2Relax' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_4' toField='set_rotation'/> |
| 2178 | < ROUTE fromNode='r_fingers3Relax' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_4' toField='set_rotation'/> |
| 2179 | < ROUTE fromNode='r_pinky0Relax' fromField='value_changed' toNode='Joe_r_carpometacarpal_5' toField='set_rotation'/> |
| 2180 | < ROUTE fromNode='r_pinky1Relax' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_5' toField='set_rotation'/> |
| 2181 | < ROUTE fromNode='r_fingers2Relax' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_5' toField='set_rotation'/> |
| 2182 | < ROUTE fromNode='r_fingers3Relax' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_5' toField='set_rotation'/> |
| 2183 |
<!-- ROUTE information for r_sternoclavicularRoll node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_sternoclavicular.set_rotation
]
-->
<OrientationInterpolator DEF='r_sternoclavicularRoll' key='0 0.2 0.4 0.5 0.7 0.8 1' keyValue='0 0 1 0 0 0 -1 0.1 0 0 -1 0.22 0 0.5 -1 0.27 0 0 -1 0.1 0 0 1 0 0 0 1 0'/> |
| 2184 |
<!-- ROUTE information for r_acromioclavicularRoll node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_acromioclavicular.set_rotation
]
-->
<OrientationInterpolator DEF='r_acromioclavicularRoll' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 -0.05 0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 2185 |
<!-- ROUTE information for r_shoulderRoll node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_shoulder.set_rotation
]
-->
<OrientationInterpolator DEF='r_shoulderRoll' key='0 0.2 0.4 0.5 0.85 1' keyValue='1 0 0 0 0 0 -1 1.66 -0.25 0 -1 1.76 0 0 -1 1.256 0 0 -1 0.05 1 0 0 0'/> |
| 2186 |
<!-- ROUTE information for r_ForeArmPitch node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_elbow.set_rotation
]
-->
<OrientationInterpolator DEF='r_ForeArmPitch' key='0 0.15 0.3 0.5 0.7 0.9 1' keyValue='0 0 1 0 -1 0 0 0.55 -1 -0.25 0 2.55 -1 -0.25 0 2.55 -1 -0.25 0 2.55 0 0 1 0 0 0 1 0'/> |
| 2187 |
<!-- ROUTE information for r_wristRoll node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_radiocarpal.set_rotation
]
-->
<OrientationInterpolator DEF='r_wristRoll' key='0 0.2 0.4 0.6 0.65 0.75 0.85 1' keyValue='0 0 1 0 0 0 1 0 0 1 0 -0.55 0 0 1 0 0 1 0 1.55 0 0 -1 1.55 0 0 1 0 0 0 1 0'/> |
| 2188 |
<!-- ROUTE information for r_handPitch node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_carpometacarpal_2.set_rotation
]
[from value_changed to Joe_r_metacarpophalangeal_2.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_2.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_2.set_rotation
]
[from value_changed to Joe_r_carpometacarpal_3.set_rotation
]
[from value_changed to Joe_r_metacarpophalangeal_3.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_3.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_3.set_rotation
]
[from value_changed to Joe_r_carpometacarpal_4.set_rotation
]
[from value_changed to Joe_r_metacarpophalangeal_4.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_4.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_4.set_rotation
]
[from value_changed to Joe_r_carpometacarpal_5.set_rotation
]
[from value_changed to Joe_r_metacarpophalangeal_5.set_rotation
]
[from value_changed to Joe_r_carpal_proximal_interphalangeal_5.set_rotation
]
[from value_changed to Joe_r_carpal_distal_interphalangeal_5.set_rotation
]
-->
<OrientationInterpolator DEF='r_handPitch' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 0 0 0.01 0.25 0 0 -0.01 0.03 0 0 0.01 0.05 0 0 0.01 0.01 0 0 1 0'/> |
| 2189 |
<!-- ROUTE information for r_thumb1Pitch node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_carpometacarpal_1.set_rotation
]
-->
<OrientationInterpolator DEF='r_thumb1Pitch' key='0 0.2 0.4 0.6 0.8 1' keyValue='1 0 0 0 1 0 0 0.5 1 0 0 1 1 0 0 0.4 1 0 0 0.2 1 0 0 0'/> |
| 2190 |
<!-- ROUTE information for r_thumb2Pitch node:
[from Time2.fraction_changed to set_fraction
]
[from value_changed to Joe_r_metacarpophalangeal_1.set_rotation
]
[from value_changed to Joe_r_carpal_interphalangeal_1.set_rotation
]
-->
<OrientationInterpolator DEF='r_thumb2Pitch' key='0 0.2 0.4 0.6 0.8 1' keyValue='0 0 1 0 1 1 0 0.3 1 1 0 0.3 1 1 0 0.6 1 1 0 0.3 0 1 1 0'/> |
| 2191 |
<!-- ROUTE information for l_shoulderRoll node:
[from value_changed to Joe_l_shoulder.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='l_shoulderRoll' key='0 0.2 0.4 0.5 0.85 1' keyValue='0.25 0 1 1.76 0 0 1 1.66 0.25 0 1 1.76 0 0 1 1.256 0 0 1 0.05 0.25 0 1 1.76'/> |
| 2192 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_sternoclavicularRoll' toField='set_fraction'/> |
| 2193 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_acromioclavicularRoll' toField='set_fraction'/> |
| 2194 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_shoulderRoll' toField='set_fraction'/> |
| 2195 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_ForeArmPitch' toField='set_fraction'/> |
| 2196 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_wristRoll' toField='set_fraction'/> |
| 2197 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_handPitch' toField='set_fraction'/> |
| 2198 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_thumb1Pitch' toField='set_fraction'/> |
| 2199 | < ROUTE fromNode='Time2' fromField='fraction_changed' toNode='r_thumb2Pitch' toField='set_fraction'/> |
| 2200 | < ROUTE fromNode='r_sternoclavicularRoll' fromField='value_changed' toNode='Joe_r_sternoclavicular' toField='set_rotation'/> |
| 2201 | < ROUTE fromNode='r_acromioclavicularRoll' fromField='value_changed' toNode='Joe_r_acromioclavicular' toField='set_rotation'/> |
| 2202 | < ROUTE fromNode='r_shoulderRoll' fromField='value_changed' toNode='Joe_r_shoulder' toField='set_rotation'/> |
| 2203 | < ROUTE fromNode='r_ForeArmPitch' fromField='value_changed' toNode='Joe_r_elbow' toField='set_rotation'/> |
| 2204 | < ROUTE fromNode='r_wristRoll' fromField='value_changed' toNode='Joe_r_radiocarpal' toField='set_rotation'/> |
| 2205 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpometacarpal_2' toField='set_rotation'/> |
| 2206 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_2' toField='set_rotation'/> |
| 2207 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_2' toField='set_rotation'/> |
| 2208 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_2' toField='set_rotation'/> |
| 2209 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpometacarpal_3' toField='set_rotation'/> |
| 2210 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_3' toField='set_rotation'/> |
| 2211 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_3' toField='set_rotation'/> |
| 2212 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_3' toField='set_rotation'/> |
| 2213 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpometacarpal_4' toField='set_rotation'/> |
| 2214 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_4' toField='set_rotation'/> |
| 2215 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_4' toField='set_rotation'/> |
| 2216 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_4' toField='set_rotation'/> |
| 2217 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpometacarpal_5' toField='set_rotation'/> |
| 2218 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_5' toField='set_rotation'/> |
| 2219 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_proximal_interphalangeal_5' toField='set_rotation'/> |
| 2220 | < ROUTE fromNode='r_handPitch' fromField='value_changed' toNode='Joe_r_carpal_distal_interphalangeal_5' toField='set_rotation'/> |
| 2221 | < ROUTE fromNode='r_thumb1Pitch' fromField='value_changed' toNode='Joe_r_carpometacarpal_1' toField='set_rotation'/> |
| 2222 | < ROUTE fromNode='r_thumb2Pitch' fromField='value_changed' toNode='Joe_r_metacarpophalangeal_1' toField='set_rotation'/> |
| 2223 | < ROUTE fromNode='r_thumb2Pitch' fromField='value_changed' toNode='Joe_r_carpal_interphalangeal_1' toField='set_rotation'/> |
| 2224 | < ROUTE fromNode='l_shoulderRoll' fromField='value_changed' toNode='Joe_l_shoulder' toField='set_rotation'/> |
| 2225 | <Group> |
| 2226 |
<!-- ROUTE information for HUMANOIDROOT_POSITION_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_humanoid_root.set_translation
]
-->
<PositionInterpolator DEF='HUMANOIDROOT_POSITION_ANIMATOR' key='0 0.0417 0.125 0.1667 0.2083 0.25 0.2917 0.375 0.4583 0.5 0.5417 0.5833 0.625 0.7083 0.75 0.7917 0.875 0.9167 1' keyValue='0 -0.0093 0 0 -0.0039 0 0 -0.0088 0 0 -0.0149 0 0 -0.0264 0 0 -0.0393 0 0 -0.0502 0 0 -0.0747 0 0 -0.0273 0 0 -0.0161 0 0 -0.0113 0 0 -0.0058 0 0 -0.002 0 0 -0.0026 0 0 -0.0143 0 0 -0.038 0 0 -0.0565 0 0 -0.045 0 0 -0.0093 0'/> |
| 2227 |
<!-- ROUTE information for HUMANOIDROOT_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_humanoid_root.set_rotation
]
-->
<OrientationInterpolator DEF='HUMANOIDROOT_ANIMATOR' key='0 1' keyValue='0 1 0 0 0 1 0 0'/> |
| 2228 |
<!-- ROUTE information for L_HIP_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_hip.set_rotation
]
-->
<OrientationInterpolator DEF='L_HIP_ANIMATOR' key='0 0.25 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='-0.873 0.0609 0.484 0.2865 0.9963 -0.0106 0.0848 0.2488 0.9965 0.0159 -0.0822 0.3836 -0.7018 -0.0322 -0.7117 0.1289 -1 0 0 0.5518 -0.9964 0.0223 0.0817 0.5351 -0.9809 0.0491 0.1881 0.5204 -0.873 0.0609 0.484 0.2865'/> |
| 2229 |
<!-- ROUTE information for L_KNEE_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_knee.set_rotation
]
-->
<OrientationInterpolator DEF='L_KNEE_ANIMATOR' key='0 0.2083 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='1 0 0 0.3226 1 0 0 0.1556 1 0 0 0.0868 1 0 0 0.8751 1 0 0 1.131 1 0 0 0.0996 1 0 0 0.3942 1 0 0 0.3226'/> |
| 2230 |
<!-- ROUTE information for L_ANKLE_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_talocrural.set_rotation
]
-->
<OrientationInterpolator DEF='L_ANKLE_ANIMATOR' key='0 0.125 0.2083 0.375 0.6667 0.9167 1' keyValue='-1 0 0 0.0671 -1 0 0 0.2152 -1 0 0 0.3184 -1 0 0 0.4717 -1 0 0 0.2912 1 0 0 0.2222 -1 0 0 0.0671'/> |
| 2231 |
<!-- ROUTE information for R_ANKLE_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_talocrural.set_rotation
]
-->
<OrientationInterpolator DEF='R_ANKLE_ANIMATOR' key='0 0.125 0.2083 0.375 0.4583 0.5 0.6667 0.75 0.78 0.9167 1' keyValue='0 0 1 0 -1 0 0 0.3533 -1 0 0 0.1072 1 0 0 0.4 1 0 0 0.127 -1 0 0 0.018 -1 0 0 0.058 -1 0 0 0.24 -1 0 0 0.35 -1 0 0 0.33 0 0 1 0'/> |
| 2232 |
<!-- ROUTE information for L_subtalar_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_tarsometatarsal_2.set_rotation
]
-->
<OrientationInterpolator DEF='L_subtalar_ANIMATOR' key='0 0.3 1' keyValue='0 0 1 0 0 0 1 0 0 0 1 0'/> |
| 2233 |
<!-- ROUTE information for L_MIDTARSAL_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_metatarsophalangeal_2.set_rotation
]
-->
<OrientationInterpolator DEF='L_MIDTARSAL_ANIMATOR' key='0 0.5 1' keyValue='1 0 0 0 1 0 0 -0.2 1 0 0 0'/> |
| 2234 |
<!-- ROUTE information for L_metatarsal_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_metatarsal.set_rotation
]
-->
<OrientationInterpolator DEF='L_metatarsal_ANIMATOR' key='0 0.2 0.4 0.8 1' keyValue='-1 0 0 0.3 -1 0 0 0.15 1 0 0 0.3 0 0 1 0 -1 0 0 0.3'/> |
| 2235 |
<!-- ROUTE information for R_HIP_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_hip.set_rotation
]
-->
<OrientationInterpolator DEF='R_HIP_ANIMATOR' key='0 0.125 0.2083 0.2917 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='-0.5831 0.0351 0.8116 0.1481 -0.995 0.023 0.0967 0.4683 -1 0.0019 0.008 0.4732 -0.998 -0.0158 -0.061 0.5079 -0.9911 -0.0354 -0.1286 0.5419 -0.9131 -0.0624 -0.403 0.3361 -0.4306 -0.0796 -0.899 0.0704 1 0 0 0.2571 0.9891 -0.0281 0.1444 0.3879 -0.5831 0.0351 0.8116 0.1481'/> |
| 2236 |
<!-- ROUTE information for R_KNEE_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_knee.set_rotation
]
-->
<OrientationInterpolator DEF='R_KNEE_ANIMATOR' key='0 0.125 0.2083 0.2917 0.375 0.5 0.6667 0.7917 0.9167 1' keyValue='1 0 0 0.8573 1 0 0 0.8926 1 0 0 0.5351 1 0 0 0.1756 1 0 0 0.1194 1 0 0 0.3153 1 0 0 0.0935 1 0 0 0.0856 1 0 0 0.2475 1 0 0 0.8573'/> |
| 2237 |
<!-- ROUTE information for R_subtalar_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_tarsometatarsal_2.set_rotation
]
-->
<OrientationInterpolator DEF='R_subtalar_ANIMATOR' key='0 0.225 0.25 0.35 0.45 0.85 0.91' keyValue='-1 0 0 0.1 0 0 1 0 0 0 1 0 1 0 0 0.1 0 0 1 0 1 0 0 0.1 1 0 0 0.25'/> |
| 2238 |
<!-- ROUTE information for R_MIDTARSAL_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_metatarsophalangeal_2.set_rotation
]
-->
<OrientationInterpolator DEF='R_MIDTARSAL_ANIMATOR' key='0 0.22 1' keyValue='1 0 0 -0.2 0 0 1 0 1 0 0 -0.2'/> |
| 2239 |
<!-- ROUTE information for R_metatarsal_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_r_tarsal_distal_interphalangeal_2.set_rotation
]
-->
<OrientationInterpolator DEF='R_metatarsal_ANIMATOR' key='0 0.2 0.4 0.8 1' keyValue='-1 0 0 0.15 0 0 1 0 1 0 0 0.3 -1 0 0 0.3 -1 0 0 0.15'/> |
| 2240 |
<!-- ROUTE information for VL5_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_vl5.set_rotation
]
-->
<OrientationInterpolator DEF='VL5_ANIMATOR' key='0 0.2083 0.375 0.75 0.8333 1' keyValue='0 1 0 0.0826 -0.0197 -0.5974 0.8017 0.0823 0.0093 -0.9648 0.2627 0.1734 -0.0124 0.9549 -0.2968 0.0873 -0.0081 0.9691 -0.2463 0.158 0 1 0 0.0826'/> |
| 2241 |
<!-- ROUTE information for SKULLBASE_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_skullbase.set_rotation
]
-->
<OrientationInterpolator DEF='SKULLBASE_ANIMATOR' key='0 0.375 0.4167 0.5 0.5833 0.6667 0.75 0.8333 0.9167 1' keyValue='0 -1 0 0.0864 0 1 0 0.1825 0 1 0 0.1505 0 1 0 0.1053 0 1 0 0.0439 0 -1 0 0.0312 0 -1 0 0.0794 0 -1 0 0.1616 0 -1 0 0.155 0 -1 0 0.0864'/> |
| 2242 |
<!-- ROUTE information for L_SHOULDER_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_shoulder.set_rotation
]
-->
<OrientationInterpolator DEF='L_SHOULDER_ANIMATOR' key='0 0.375 0.9167 1' keyValue='1 0 0.4 0.12 -1 0 0.4 0.186 1 0 0.1 0.336 1 0 0.4 0.12'/> |
| 2243 |
<!-- ROUTE information for L_ELBOW_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_elbow.set_rotation
]
-->
<OrientationInterpolator DEF='L_ELBOW_ANIMATOR' key='0 0.375 0.9167 1' keyValue='-1 0 0 0.066 -1 0 0 0.488 -1 0 0 0.0177 -1 0 0 0.066'/> |
| 2244 |
<!-- ROUTE information for L_WRIST_ANIMATOR node:
[from Time1.fraction_changed to set_fraction
]
[from value_changed to Joe_l_radiocarpal.set_rotation
]
-->
<OrientationInterpolator DEF='L_WRIST_ANIMATOR' key='0 0.375 0.9167 1' keyValue='0 -1 0 0.461 -0.3302 -0.9275 0.1755 0.5388 0.0328 -0.9993 -0.0172 0.492 0 -1 0 0.4611'/> |
| 2245 |
<!-- ROUTE information for R_SHOULDER_ANIMATOR node:
[from value_changed to Joe_r_shoulder.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='R_SHOULDER_ANIMATOR' key='0 0.375 0.9167 1' keyValue='-1 0 -1 0.092 1 0 -0.2 0.3197 -1 0 -0.5 0.1564 -1 0 -1 0.092'/> |
| 2246 |
<!-- ROUTE information for R_ELBOW_ANIMATOR node:
[from value_changed to Joe_r_elbow.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='R_ELBOW_ANIMATOR' key='0 0.375 0.9167 1' keyValue='-1 0 0 0.4115 -1 0 0 0.0925 -1 0 0 0.5726 -1 0 0 0.4115'/> |
| 2247 |
<!-- ROUTE information for R_WRIST_ANIMATOR node:
[from value_changed to Joe_r_radiocarpal.set_rotation
]
[no input ROUTE found] -->
<OrientationInterpolator DEF='R_WRIST_ANIMATOR' key='0 0.375 0.9167 1' keyValue='-0.8129 0.4759 -0.3357 0.1346 0.1533 -0.9878 0.0258 0.3902 -0.5701 0.7604 -0.311 0.366 -0.8129 0.4759 -0.3357 0.1346'/> |
| 2248 | </Group> |
| 2249 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='HUMANOIDROOT_POSITION_ANIMATOR' toField='set_fraction'/> |
| 2250 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='HUMANOIDROOT_ANIMATOR' toField='set_fraction'/> |
| 2251 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_HIP_ANIMATOR' toField='set_fraction'/> |
| 2252 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_KNEE_ANIMATOR' toField='set_fraction'/> |
| 2253 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_ANKLE_ANIMATOR' toField='set_fraction'/> |
| 2254 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_subtalar_ANIMATOR' toField='set_fraction'/> |
| 2255 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_MIDTARSAL_ANIMATOR' toField='set_fraction'/> |
| 2256 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_metatarsal_ANIMATOR' toField='set_fraction'/> |
| 2257 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_HIP_ANIMATOR' toField='set_fraction'/> |
| 2258 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_KNEE_ANIMATOR' toField='set_fraction'/> |
| 2259 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_ANKLE_ANIMATOR' toField='set_fraction'/> |
| 2260 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_subtalar_ANIMATOR' toField='set_fraction'/> |
| 2261 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_MIDTARSAL_ANIMATOR' toField='set_fraction'/> |
| 2262 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='R_metatarsal_ANIMATOR' toField='set_fraction'/> |
| 2263 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='VL5_ANIMATOR' toField='set_fraction'/> |
| 2264 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='SKULLBASE_ANIMATOR' toField='set_fraction'/> |
| 2265 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_SHOULDER_ANIMATOR' toField='set_fraction'/> |
| 2266 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_ELBOW_ANIMATOR' toField='set_fraction'/> |
| 2267 | < ROUTE fromNode='Time1' fromField='fraction_changed' toNode='L_WRIST_ANIMATOR' toField='set_fraction'/> |
| 2268 | < ROUTE fromNode='HUMANOIDROOT_POSITION_ANIMATOR' fromField='value_changed' toNode='Joe_humanoid_root' toField='set_translation'/> |
| 2269 | < ROUTE fromNode='HUMANOIDROOT_ANIMATOR' fromField='value_changed' toNode='Joe_humanoid_root' toField='set_rotation'/> |
| 2270 | < ROUTE fromNode='L_HIP_ANIMATOR' fromField='value_changed' toNode='Joe_l_hip' toField='set_rotation'/> |
| 2271 | < ROUTE fromNode='L_KNEE_ANIMATOR' fromField='value_changed' toNode='Joe_l_knee' toField='set_rotation'/> |
| 2272 | < ROUTE fromNode='L_ANKLE_ANIMATOR' fromField='value_changed' toNode='Joe_l_talocrural' toField='set_rotation'/> |
| 2273 | < ROUTE fromNode='L_MIDTARSAL_ANIMATOR' fromField='value_changed' toNode='Joe_l_metatarsophalangeal_2' toField='set_rotation'/> |
| 2274 | < ROUTE fromNode='L_subtalar_ANIMATOR' fromField='value_changed' toNode='Joe_l_tarsometatarsal_2' toField='set_rotation'/> |
| 2275 | < ROUTE fromNode='L_metatarsal_ANIMATOR' fromField='value_changed' toNode='Joe_l_metatarsal' toField='set_rotation'/> |
| 2276 | < ROUTE fromNode='R_HIP_ANIMATOR' fromField='value_changed' toNode='Joe_r_hip' toField='set_rotation'/> |
| 2277 | < ROUTE fromNode='R_KNEE_ANIMATOR' fromField='value_changed' toNode='Joe_r_knee' toField='set_rotation'/> |
| 2278 | < ROUTE fromNode='R_ANKLE_ANIMATOR' fromField='value_changed' toNode='Joe_r_talocrural' toField='set_rotation'/> |
| 2279 | < ROUTE fromNode='R_subtalar_ANIMATOR' fromField='value_changed' toNode='Joe_r_tarsometatarsal_2' toField='set_rotation'/> |
| 2280 | < ROUTE fromNode='R_MIDTARSAL_ANIMATOR' fromField='value_changed' toNode='Joe_r_metatarsophalangeal_2' toField='set_rotation'/> |
| 2281 | < ROUTE fromNode='R_metatarsal_ANIMATOR' fromField='value_changed' toNode='Joe_r_tarsal_distal_interphalangeal_2' toField='set_rotation'/> |
| 2282 | < ROUTE fromNode='VL5_ANIMATOR' fromField='value_changed' toNode='Joe_vl5' toField='set_rotation'/> |
| 2283 | < ROUTE fromNode='SKULLBASE_ANIMATOR' fromField='value_changed' toNode='Joe_skullbase' toField='set_rotation'/> |
| 2284 | < ROUTE fromNode='L_SHOULDER_ANIMATOR' fromField='value_changed' toNode='Joe_l_shoulder' toField='set_rotation'/> |
| 2285 | < ROUTE fromNode='L_ELBOW_ANIMATOR' fromField='value_changed' toNode='Joe_l_elbow' toField='set_rotation'/> |
| 2286 | < ROUTE fromNode='L_WRIST_ANIMATOR' fromField='value_changed' toNode='Joe_l_radiocarpal' toField='set_rotation'/> |
| 2287 | < ROUTE fromNode='R_SHOULDER_ANIMATOR' fromField='value_changed' toNode='Joe_r_shoulder' toField='set_rotation'/> |
| 2288 | < ROUTE fromNode='R_ELBOW_ANIMATOR' fromField='value_changed' toNode='Joe_r_elbow' toField='set_rotation'/> |
| 2289 | < ROUTE fromNode='R_WRIST_ANIMATOR' fromField='value_changed' toNode='Joe_r_radiocarpal' toField='set_rotation'/> |
| 2290 | </Scene> |
| 2291 | </X3D> |
Event Graph ROUTE Table shows event connections.
HAnimHumanoid model visualization report: Human HAnimHumanoid Report
-->
<!--
![]() DEF nodes index:
boxCoords,
CoordinateAxes,
cordsysfloor,
EyeballsRotation,
HeadlightOnRevealsSkinTextureAndColors,
HUMANOIDROOT_ANIMATOR,
HUMANOIDROOT_POSITION_ANIMATOR,
Joe_c1,
Joe_c2,
Joe_c3,
Joe_c4,
Joe_c5,
Joe_c6,
Joe_c7,
Joe_cervicale_pt,
Joe_crotch_pt,
Joe_floormarker_pt,
Joe_Human,
Joe_humanoid_root,
Joe_l_acromioclavicular,
Joe_l_acromion_pt,
Joe_l_asis_pt,
Joe_l_axilla_distal_pt,
Joe_l_axilla_proximal_pt,
Joe_l_calcaneus_posterior_pt,
Joe_l_calf,
Joe_l_carpal,
Joe_l_carpal_distal_interphalangeal_2,
Joe_l_carpal_distal_interphalangeal_3,
Joe_l_carpal_distal_interphalangeal_4,
Joe_l_carpal_distal_interphalangeal_5,
Joe_l_carpal_distal_phalanx_1,
Joe_l_carpal_distal_phalanx_1_tip,
Joe_l_carpal_distal_phalanx_2,
Joe_l_carpal_distal_phalanx_2_tip,
Joe_l_carpal_distal_phalanx_3,
Joe_l_carpal_distal_phalanx_3_tip,
Joe_l_carpal_distal_phalanx_4,
Joe_l_carpal_distal_phalanx_4_tip,
Joe_l_carpal_distal_phalanx_5,
Joe_l_carpal_distal_phalanx_5_tip,
Joe_l_carpal_interphalangeal_1,
Joe_l_carpal_middle_phalanx_2,
Joe_l_carpal_middle_phalanx_3,
Joe_l_carpal_middle_phalanx_4,
Joe_l_carpal_middle_phalanx_5,
Joe_l_carpal_proximal_interphalangeal_2,
Joe_l_carpal_proximal_interphalangeal_3,
Joe_l_carpal_proximal_interphalangeal_4,
Joe_l_carpal_proximal_interphalangeal_5,
Joe_l_carpal_proximal_phalanx_1,
Joe_l_carpal_proximal_phalanx_2,
Joe_l_carpal_proximal_phalanx_3,
Joe_l_carpal_proximal_phalanx_4,
Joe_l_carpal_proximal_phalanx_5,
Joe_l_carpometacarpal_1,
Joe_l_carpometacarpal_2,
Joe_l_carpometacarpal_3,
Joe_l_carpometacarpal_4,
Joe_l_carpometacarpal_5,
Joe_l_clavicle,
Joe_l_clavicle_pt,
Joe_l_dactylion_pt,
Joe_l_elbow,
Joe_l_eyeball,
Joe_l_eyeball_joint,
Joe_l_femoral_lateral_epicondyle_pt,
Joe_l_femoral_medial_epicondyle_pt,
Joe_l_forearm,
Joe_l_gonion_pt,
Joe_l_hip,
Joe_l_humeral_lateral_epicondyle_pt,
Joe_l_humeral_medial_epicondyle_pt,
Joe_l_iliocristale_pt,
Joe_l_infraorbitale_pt,
Joe_l_knee,
Joe_l_knee_crease_pt,
Joe_l_lateral_malleolus_pt,
Joe_l_medial_malleolus_pt,
Joe_l_metacarpal_1,
Joe_l_metacarpal_2,
Joe_l_metacarpal_3,
Joe_l_metacarpal_4,
Joe_l_metacarpal_5,
Joe_l_metacarpal_phalanx_2_pt,
Joe_l_metacarpal_phalanx_5_pt,
Joe_l_metacarpophalangeal_1,
Joe_l_metacarpophalangeal_2,
Joe_l_metacarpophalangeal_3,
Joe_l_metacarpophalangeal_4,
Joe_l_metacarpophalangeal_5,
Joe_l_metatarsal,
Joe_l_metatarsal_2,
Joe_l_metatarsal_phalanx_1_pt,
Joe_l_metatarsal_phalanx_5_pt,
Joe_l_metatarsophalangeal_2,
Joe_l_neck_base_pt,
Joe_l_olecranon_pt,
Joe_l_psis_pt,
Joe_l_radial_styloid_pt,
Joe_l_radiale_pt,
Joe_l_radiocarpal,
Joe_l_rib10_pt,
Joe_l_scapula,
Joe_l_shoulder,
Joe_l_sphyrion_pt,
Joe_l_sternoclavicular,
Joe_l_talocrural,
Joe_l_talus,
Joe_l_tarsal_distal_phalanx_2,
Joe_l_tarsal_distal_phalanx_2_pt,
Joe_l_tarsal_proximal_phalanx_2,
Joe_l_tarsometatarsal_2,
Joe_l_thelion_pt,
Joe_l_thigh,
Joe_l_tragion_pt,
Joe_l_trochanterion_pt,
Joe_l_ulnar_styloid_pt,
Joe_l_upperarm,
Joe_l1,
Joe_l2,
Joe_l3,
Joe_l4,
Joe_l5,
Joe_navel_pt,
Joe_nuchale_pt,
Joe_pelvis,
Joe_r_acromioclavicular,
Joe_r_acromion_pt,
Joe_r_asis_pt,
Joe_r_axilla_distal_pt,
Joe_r_axilla_proximal_pt,
Joe_r_calcaneus_posterior_pt,
Joe_r_calf,
Joe_r_carpal,
Joe_r_carpal_distal_interphalangeal_2,
Joe_r_carpal_distal_interphalangeal_3,
Joe_r_carpal_distal_interphalangeal_4,
Joe_r_carpal_distal_interphalangeal_5,
Joe_r_carpal_distal_phalanx_1,
Joe_r_carpal_distal_phalanx_1_tip,
Joe_r_carpal_distal_phalanx_2,
Joe_r_carpal_distal_phalanx_2_tip,
Joe_r_carpal_distal_phalanx_3,
Joe_r_carpal_distal_phalanx_3_tip,
Joe_r_carpal_distal_phalanx_4,
Joe_r_carpal_distal_phalanx_4_tip,
Joe_r_carpal_distal_phalanx_5,
Joe_r_carpal_distal_phalanx_5_tip,
Joe_r_carpal_interphalangeal_1,
Joe_r_carpal_middle_phalanx_2,
Joe_r_carpal_middle_phalanx_3,
Joe_r_carpal_middle_phalanx_4,
Joe_r_carpal_middle_phalanx_5,
Joe_r_carpal_proximal_interphalangeal_2,
Joe_r_carpal_proximal_interphalangeal_3,
Joe_r_carpal_proximal_interphalangeal_4,
Joe_r_carpal_proximal_interphalangeal_5,
Joe_r_carpal_proximal_phalanx_1,
Joe_r_carpal_proximal_phalanx_2,
Joe_r_carpal_proximal_phalanx_3,
Joe_r_carpal_proximal_phalanx_4,
Joe_r_carpal_proximal_phalanx_5,
Joe_r_carpometacarpal_1,
Joe_r_carpometacarpal_2,
Joe_r_carpometacarpal_3,
Joe_r_carpometacarpal_4,
Joe_r_carpometacarpal_5,
Joe_r_clavicle,
Joe_r_clavicle_pt,
Joe_r_dactylion_pt,
Joe_r_elbow,
Joe_r_eyeball,
Joe_r_eyeball_joint,
Joe_r_femoral_lateral_epicondyle_pt,
Joe_r_femoral_medial_epicondyle_pt,
Joe_r_forearm,
Joe_r_gonion_pt,
Joe_r_hip,
Joe_r_humeral_lateral_epicondyle_pt,
Joe_r_humeral_medial_epicondyle_pt,
Joe_r_iliocristale_pt,
Joe_r_infraorbitale_pt,
Joe_r_knee,
Joe_r_knee_crease_pt,
Joe_r_lateral_malleolus_pt,
Joe_r_medial_malleolus_pt,
Joe_r_metacarpal_1,
Joe_r_metacarpal_2,
Joe_r_metacarpal_3,
Joe_r_metacarpal_4,
Joe_r_metacarpal_5,
Joe_r_metacarpal_phalanx_2_pt,
Joe_r_metacarpal_phalanx_5_pt,
Joe_r_metacarpophalangeal_1,
Joe_r_metacarpophalangeal_2,
Joe_r_metacarpophalangeal_3,
Joe_r_metacarpophalangeal_4,
Joe_r_metacarpophalangeal_5,
Joe_r_metatarsal_2,
Joe_r_metatarsal_phalanx_1_pt,
Joe_r_metatarsal_phalanx_5_pt,
Joe_r_metatarsophalangeal_2,
Joe_r_neck_base_pt,
Joe_r_olecranon_pt,
Joe_r_psis_pt,
Joe_r_radial_styloid_pt,
Joe_r_radiale_pt,
Joe_r_radiocarpal,
Joe_r_rib10_pt,
Joe_r_scapula,
Joe_r_shoulder,
Joe_r_sphyrion_pt,
Joe_r_sternoclavicular,
Joe_r_talocrural,
Joe_r_talus,
Joe_r_tarsal_distal_interphalangeal_2,
Joe_r_tarsal_distal_phalanx_2,
Joe_r_tarsal_distal_phalanx_2_pt,
Joe_r_tarsal_proximal_phalanx_2,
Joe_r_tarsometatarsal_2,
Joe_r_thelion_pt,
Joe_r_thigh,
Joe_r_tragion_pt,
Joe_r_trochanterion_pt,
Joe_r_ulnar_styloid_pt,
Joe_r_upperarm,
Joe_rib10_midspine_pt,
Joe_sacroiliac,
Joe_sacrum,
Joe_sellion_pt,
Joe_skull,
Joe_skull_vertex_tip,
Joe_skullbase,
Joe_substernale_pt,
Joe_supramenton_pt,
Joe_suprasternale_pt,
Joe_t1,
Joe_t10,
Joe_t11,
Joe_t12,
Joe_t2,
Joe_t3,
Joe_t4,
Joe_t5,
Joe_t6,
Joe_t7,
Joe_t8,
Joe_t9,
Joe_toPelvis,
Joe_vc1,
Joe_vc2,
Joe_vc3,
Joe_vc4,
Joe_vc5,
Joe_vc6,
Joe_vc7,
Joe_vl1,
Joe_vl2,
Joe_vl3,
Joe_vl4,
Joe_vl5,
Joe_vt1,
Joe_vt10,
Joe_vt11,
Joe_vt12,
Joe_vt2,
Joe_vt3,
Joe_vt4,
Joe_vt5,
Joe_vt6,
Joe_vt7,
Joe_vt8,
Joe_vt9,
Joe_waist_preferred_posterior_pt,
JoeISOHumanoid,
jointbox,
L_ANKLE_ANIMATOR,
L_ELBOW_ANIMATOR,
L_HIP_ANIMATOR,
L_KNEE_ANIMATOR,
L_metatarsal_ANIMATOR,
L_MIDTARSAL_ANIMATOR,
L_SHOULDER_ANIMATOR,
l_shoulderRoll,
L_subtalar_ANIMATOR,
L_WRIST_ANIMATOR,
Pitch,
r_acromioclavicularRelax,
r_acromioclavicularRoll,
R_ANKLE_ANIMATOR,
R_ELBOW_ANIMATOR,
r_elbowRelax,
r_fingers2Relax,
r_fingers3Relax,
r_ForeArmPitch,
r_handPitch,
R_HIP_ANIMATOR,
r_index0Relax,
r_index1Relax,
R_KNEE_ANIMATOR,
R_metatarsal_ANIMATOR,
r_middle0Relax,
r_middle1Relax,
R_MIDTARSAL_ANIMATOR,
r_pinky0Relax,
r_pinky1Relax,
r_ring0Relax,
r_ring1Relax,
R_SHOULDER_ANIMATOR,
r_shoulderRelax,
r_shoulderRoll,
r_sternoclavicularRelax,
r_sternoclavicularRoll,
R_subtalar_ANIMATOR,
r_thumb1Pitch,
r_thumb1Relax,
r_thumb2Pitch,
r_thumb2Relax,
r_thumb3Relax,
R_WRIST_ANIMATOR,
r_wristRelax,
r_wristRoll,
Roll,
SegmentLine,
sitebox,
SkinAppearance,
SkinMaterial,
SkinShape,
skinsphere,
SKULLBASE_ANIMATOR,
SpecHumanoid,
TheSkinCoord,
Thumbnail,
Time1,
Time2,
Time3,
vc6Yaw,
ViewpointGroup,
VisualizationShapes,
VL5_ANIMATOR,
Yaw,
zBlueSpiralBkg2
DEF nodes index:
boxCoords,
CoordinateAxes,
cordsysfloor,
EyeballsRotation,
HeadlightOnRevealsSkinTextureAndColors,
HUMANOIDROOT_ANIMATOR,
HUMANOIDROOT_POSITION_ANIMATOR,
Joe_c1,
Joe_c2,
Joe_c3,
Joe_c4,
Joe_c5,
Joe_c6,
Joe_c7,
Joe_cervicale_pt,
Joe_crotch_pt,
Joe_floormarker_pt,
Joe_Human,
Joe_humanoid_root,
Joe_l_acromioclavicular,
Joe_l_acromion_pt,
Joe_l_asis_pt,
Joe_l_axilla_distal_pt,
Joe_l_axilla_proximal_pt,
Joe_l_calcaneus_posterior_pt,
Joe_l_calf,
Joe_l_carpal,
Joe_l_carpal_distal_interphalangeal_2,
Joe_l_carpal_distal_interphalangeal_3,
Joe_l_carpal_distal_interphalangeal_4,
Joe_l_carpal_distal_interphalangeal_5,
Joe_l_carpal_distal_phalanx_1,
Joe_l_carpal_distal_phalanx_1_tip,
Joe_l_carpal_distal_phalanx_2,
Joe_l_carpal_distal_phalanx_2_tip,
Joe_l_carpal_distal_phalanx_3,
Joe_l_carpal_distal_phalanx_3_tip,
Joe_l_carpal_distal_phalanx_4,
Joe_l_carpal_distal_phalanx_4_tip,
Joe_l_carpal_distal_phalanx_5,
Joe_l_carpal_distal_phalanx_5_tip,
Joe_l_carpal_interphalangeal_1,
Joe_l_carpal_middle_phalanx_2,
Joe_l_carpal_middle_phalanx_3,
Joe_l_carpal_middle_phalanx_4,
Joe_l_carpal_middle_phalanx_5,
Joe_l_carpal_proximal_interphalangeal_2,
Joe_l_carpal_proximal_interphalangeal_3,
Joe_l_carpal_proximal_interphalangeal_4,
Joe_l_carpal_proximal_interphalangeal_5,
Joe_l_carpal_proximal_phalanx_1,
Joe_l_carpal_proximal_phalanx_2,
Joe_l_carpal_proximal_phalanx_3,
Joe_l_carpal_proximal_phalanx_4,
Joe_l_carpal_proximal_phalanx_5,
Joe_l_carpometacarpal_1,
Joe_l_carpometacarpal_2,
Joe_l_carpometacarpal_3,
Joe_l_carpometacarpal_4,
Joe_l_carpometacarpal_5,
Joe_l_clavicle,
Joe_l_clavicle_pt,
Joe_l_dactylion_pt,
Joe_l_elbow,
Joe_l_eyeball,
Joe_l_eyeball_joint,
Joe_l_femoral_lateral_epicondyle_pt,
Joe_l_femoral_medial_epicondyle_pt,
Joe_l_forearm,
Joe_l_gonion_pt,
Joe_l_hip,
Joe_l_humeral_lateral_epicondyle_pt,
Joe_l_humeral_medial_epicondyle_pt,
Joe_l_iliocristale_pt,
Joe_l_infraorbitale_pt,
Joe_l_knee,
Joe_l_knee_crease_pt,
Joe_l_lateral_malleolus_pt,
Joe_l_medial_malleolus_pt,
Joe_l_metacarpal_1,
Joe_l_metacarpal_2,
Joe_l_metacarpal_3,
Joe_l_metacarpal_4,
Joe_l_metacarpal_5,
Joe_l_metacarpal_phalanx_2_pt,
Joe_l_metacarpal_phalanx_5_pt,
Joe_l_metacarpophalangeal_1,
Joe_l_metacarpophalangeal_2,
Joe_l_metacarpophalangeal_3,
Joe_l_metacarpophalangeal_4,
Joe_l_metacarpophalangeal_5,
Joe_l_metatarsal,
Joe_l_metatarsal_2,
Joe_l_metatarsal_phalanx_1_pt,
Joe_l_metatarsal_phalanx_5_pt,
Joe_l_metatarsophalangeal_2,
Joe_l_neck_base_pt,
Joe_l_olecranon_pt,
Joe_l_psis_pt,
Joe_l_radial_styloid_pt,
Joe_l_radiale_pt,
Joe_l_radiocarpal,
Joe_l_rib10_pt,
Joe_l_scapula,
Joe_l_shoulder,
Joe_l_sphyrion_pt,
Joe_l_sternoclavicular,
Joe_l_talocrural,
Joe_l_talus,
Joe_l_tarsal_distal_phalanx_2,
Joe_l_tarsal_distal_phalanx_2_pt,
Joe_l_tarsal_proximal_phalanx_2,
Joe_l_tarsometatarsal_2,
Joe_l_thelion_pt,
Joe_l_thigh,
Joe_l_tragion_pt,
Joe_l_trochanterion_pt,
Joe_l_ulnar_styloid_pt,
Joe_l_upperarm,
Joe_l1,
Joe_l2,
Joe_l3,
Joe_l4,
Joe_l5,
Joe_navel_pt,
Joe_nuchale_pt,
Joe_pelvis,
Joe_r_acromioclavicular,
Joe_r_acromion_pt,
Joe_r_asis_pt,
Joe_r_axilla_distal_pt,
Joe_r_axilla_proximal_pt,
Joe_r_calcaneus_posterior_pt,
Joe_r_calf,
Joe_r_carpal,
Joe_r_carpal_distal_interphalangeal_2,
Joe_r_carpal_distal_interphalangeal_3,
Joe_r_carpal_distal_interphalangeal_4,
Joe_r_carpal_distal_interphalangeal_5,
Joe_r_carpal_distal_phalanx_1,
Joe_r_carpal_distal_phalanx_1_tip,
Joe_r_carpal_distal_phalanx_2,
Joe_r_carpal_distal_phalanx_2_tip,
Joe_r_carpal_distal_phalanx_3,
Joe_r_carpal_distal_phalanx_3_tip,
Joe_r_carpal_distal_phalanx_4,
Joe_r_carpal_distal_phalanx_4_tip,
Joe_r_carpal_distal_phalanx_5,
Joe_r_carpal_distal_phalanx_5_tip,
Joe_r_carpal_interphalangeal_1,
Joe_r_carpal_middle_phalanx_2,
Joe_r_carpal_middle_phalanx_3,
Joe_r_carpal_middle_phalanx_4,
Joe_r_carpal_middle_phalanx_5,
Joe_r_carpal_proximal_interphalangeal_2,
Joe_r_carpal_proximal_interphalangeal_3,
Joe_r_carpal_proximal_interphalangeal_4,
Joe_r_carpal_proximal_interphalangeal_5,
Joe_r_carpal_proximal_phalanx_1,
Joe_r_carpal_proximal_phalanx_2,
Joe_r_carpal_proximal_phalanx_3,
Joe_r_carpal_proximal_phalanx_4,
Joe_r_carpal_proximal_phalanx_5,
Joe_r_carpometacarpal_1,
Joe_r_carpometacarpal_2,
Joe_r_carpometacarpal_3,
Joe_r_carpometacarpal_4,
Joe_r_carpometacarpal_5,
Joe_r_clavicle,
Joe_r_clavicle_pt,
Joe_r_dactylion_pt,
Joe_r_elbow,
Joe_r_eyeball,
Joe_r_eyeball_joint,
Joe_r_femoral_lateral_epicondyle_pt,
Joe_r_femoral_medial_epicondyle_pt,
Joe_r_forearm,
Joe_r_gonion_pt,
Joe_r_hip,
Joe_r_humeral_lateral_epicondyle_pt,
Joe_r_humeral_medial_epicondyle_pt,
Joe_r_iliocristale_pt,
Joe_r_infraorbitale_pt,
Joe_r_knee,
Joe_r_knee_crease_pt,
Joe_r_lateral_malleolus_pt,
Joe_r_medial_malleolus_pt,
Joe_r_metacarpal_1,
Joe_r_metacarpal_2,
Joe_r_metacarpal_3,
Joe_r_metacarpal_4,
Joe_r_metacarpal_5,
Joe_r_metacarpal_phalanx_2_pt,
Joe_r_metacarpal_phalanx_5_pt,
Joe_r_metacarpophalangeal_1,
Joe_r_metacarpophalangeal_2,
Joe_r_metacarpophalangeal_3,
Joe_r_metacarpophalangeal_4,
Joe_r_metacarpophalangeal_5,
Joe_r_metatarsal_2,
Joe_r_metatarsal_phalanx_1_pt,
Joe_r_metatarsal_phalanx_5_pt,
Joe_r_metatarsophalangeal_2,
Joe_r_neck_base_pt,
Joe_r_olecranon_pt,
Joe_r_psis_pt,
Joe_r_radial_styloid_pt,
Joe_r_radiale_pt,
Joe_r_radiocarpal,
Joe_r_rib10_pt,
Joe_r_scapula,
Joe_r_shoulder,
Joe_r_sphyrion_pt,
Joe_r_sternoclavicular,
Joe_r_talocrural,
Joe_r_talus,
Joe_r_tarsal_distal_interphalangeal_2,
Joe_r_tarsal_distal_phalanx_2,
Joe_r_tarsal_distal_phalanx_2_pt,
Joe_r_tarsal_proximal_phalanx_2,
Joe_r_tarsometatarsal_2,
Joe_r_thelion_pt,
Joe_r_thigh,
Joe_r_tragion_pt,
Joe_r_trochanterion_pt,
Joe_r_ulnar_styloid_pt,
Joe_r_upperarm,
Joe_rib10_midspine_pt,
Joe_sacroiliac,
Joe_sacrum,
Joe_sellion_pt,
Joe_skull,
Joe_skull_vertex_tip,
Joe_skullbase,
Joe_substernale_pt,
Joe_supramenton_pt,
Joe_suprasternale_pt,
Joe_t1,
Joe_t10,
Joe_t11,
Joe_t12,
Joe_t2,
Joe_t3,
Joe_t4,
Joe_t5,
Joe_t6,
Joe_t7,
Joe_t8,
Joe_t9,
Joe_toPelvis,
Joe_vc1,
Joe_vc2,
Joe_vc3,
Joe_vc4,
Joe_vc5,
Joe_vc6,
Joe_vc7,
Joe_vl1,
Joe_vl2,
Joe_vl3,
Joe_vl4,
Joe_vl5,
Joe_vt1,
Joe_vt10,
Joe_vt11,
Joe_vt12,
Joe_vt2,
Joe_vt3,
Joe_vt4,
Joe_vt5,
Joe_vt6,
Joe_vt7,
Joe_vt8,
Joe_vt9,
Joe_waist_preferred_posterior_pt,
JoeISOHumanoid,
jointbox,
L_ANKLE_ANIMATOR,
L_ELBOW_ANIMATOR,
L_HIP_ANIMATOR,
L_KNEE_ANIMATOR,
L_metatarsal_ANIMATOR,
L_MIDTARSAL_ANIMATOR,
L_SHOULDER_ANIMATOR,
l_shoulderRoll,
L_subtalar_ANIMATOR,
L_WRIST_ANIMATOR,
Pitch,
r_acromioclavicularRelax,
r_acromioclavicularRoll,
R_ANKLE_ANIMATOR,
R_ELBOW_ANIMATOR,
r_elbowRelax,
r_fingers2Relax,
r_fingers3Relax,
r_ForeArmPitch,
r_handPitch,
R_HIP_ANIMATOR,
r_index0Relax,
r_index1Relax,
R_KNEE_ANIMATOR,
R_metatarsal_ANIMATOR,
r_middle0Relax,
r_middle1Relax,
R_MIDTARSAL_ANIMATOR,
r_pinky0Relax,
r_pinky1Relax,
r_ring0Relax,
r_ring1Relax,
R_SHOULDER_ANIMATOR,
r_shoulderRelax,
r_shoulderRoll,
r_sternoclavicularRelax,
r_sternoclavicularRoll,
R_subtalar_ANIMATOR,
r_thumb1Pitch,
r_thumb1Relax,
r_thumb2Pitch,
r_thumb2Relax,
r_thumb3Relax,
R_WRIST_ANIMATOR,
r_wristRelax,
r_wristRoll,
Roll,
SegmentLine,
sitebox,
SkinAppearance,
SkinMaterial,
SkinShape,
skinsphere,
SKULLBASE_ANIMATOR,
SpecHumanoid,
TheSkinCoord,
Thumbnail,
Time1,
Time2,
Time3,
vc6Yaw,
ViewpointGroup,
VisualizationShapes,
VL5_ANIMATOR,
Yaw,
zBlueSpiralBkg2
Index for Viewpoint nodes: Viewpoint_1, Viewpoint_2, Viewpoint_3, Viewpoint_4, Viewpoint_5, Viewpoint_6, Viewpoint_7, Viewpoint_8, Viewpoint_9, Viewpoint_10, Viewpoint_11
-->=============================================================================================================================
HAnimHumanoid Joe_Human skeleton holds X3D4 HAnim2 joints/segments/sites and a skin node.
[key] jointname : segmentname ^ sitename
[nodes] HAnimJoint (89), : HAnimSegment (90), % HAnimDisplacer (0), $ HAnimMotion (0), ^ HAnimSite (88), @ skin nodes (1)
=============================================================================================================================
HAnimHumanoid DEF='Joe_Human name='Human' loa='4'
skin Shape DEF='SkinShape'
skeleton
humanoid_root : sacrum
sacroiliac : pelvis ^ l_iliocristale_pt, l_trochanterion_pt, r_iliocristale_pt, r_trochanterion_pt, l_asis_pt, r_asis_pt, l_psis_pt, r_psis_pt, floormarker_pt, crotch_pt
| l_hip : l_thigh ^ l_knee_crease_pt, l_femoral_lateral_epicondyle_pt, l_femoral_medial_epicondyle_pt
| | l_knee : l_calf ^ l_lateral_malleolus_pt, l_medial_malleolus_pt
| | l_talocrural : l_talus ^ l_sphyrion_pt, l_calcaneus_posterior_pt
| | l_tarsometatarsal_2 : l_metatarsal_2
| | l_metatarsophalangeal_2 : l_tarsal_proximal_phalanx_2 ^ l_metatarsal_phalanx_1_pt
| | l_metatarsal (HAnim2 name l_tarsal_distal_interphalangeal_2) : l_tarsal_distal_phalanx_2 (HAnim2 name l_tarsal_distal_interphalangeal_2) ^ l_metatarsal_phalanx_5_pt (HAnim2 name l_tarsal_distal_interphalangeal_2), l_tarsal_distal_phalanx_2_pt (HAnim2 name l_tarsal_distal_interphalangeal_2)
| r_hip : r_thigh ^ r_knee_crease_pt, r_femoral_lateral_epicondyle_pt, r_femoral_medial_epicondyle_pt
| r_knee : r_calf ^ r_lateral_malleolus_pt, r_medial_malleolus_pt
| r_talocrural : r_talus ^ r_sphyrion_pt, r_calcaneus_posterior_pt
| r_tarsometatarsal_2 : r_metatarsal_2
| r_metatarsophalangeal_2 : r_tarsal_proximal_phalanx_2 ^ r_metatarsal_phalanx_1_pt
| r_tarsal_distal_interphalangeal_2 : r_tarsal_distal_phalanx_2 ^ r_metatarsal_phalanx_5_pt, r_tarsal_distal_phalanx_2_pt
vl5 : toPelvis l5 ^ waist_preferred_posterior_pt, navel_pt
vl4 : l4
vl3 : l3
vl2 : l2 ^ r_rib10_pt, l_rib10_pt, rib10_midspine_pt
vl1 : l1
vt12 : t12
vt11 : t11
vt10 : t10 ^ substernale_pt
vt9 : t9 ^ r_thelion_pt, l_thelion_pt
vt8 : t8
vt7 : t7
vt6 : t6
vt5 : t5
vt4 : t4
vt3 : t3
vt2 : t2
vt1 : t1 ^ suprasternale_pt, cervicale_pt
vc7 : c7 ^ r_neck_base_pt, l_neck_base_pt
| vc6 : c6
| vc5 : c5
| vc4 : c4
| vc3 : c3
| vc2 : c2
| vc1 : c1
| skullbase : skull ^ skull_vertex_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
| l_eyeball_joint : l_eyeball
| r_eyeball_joint : r_eyeball
l_sternoclavicular : l_clavicle ^ l_clavicle_pt
| l_acromioclavicular : l_scapula ^ l_acromion_pt, l_axilla_proximal_pt, l_axilla_distal_pt
| l_shoulder : l_upperarm ^ l_humeral_medial_epicondyle_pt, l_radiale_pt, l_humeral_lateral_epicondyle_pt
| l_elbow : l_forearm ^ l_radial_styloid_pt, l_olecranon_pt
| l_radiocarpal : l_carpal ^ l_metacarpal_phalanx_2_pt, l_ulnar_styloid_pt, l_metacarpal_phalanx_5_pt
| l_carpometacarpal_1 : l_metacarpal_1
| | l_metacarpophalangeal_1 : l_carpal_proximal_phalanx_1
| | l_carpal_interphalangeal_1 : l_carpal_distal_phalanx_1 ^ l_carpal_distal_phalanx_1_tip
| l_carpometacarpal_2 : l_metacarpal_2
| | l_metacarpophalangeal_2 : l_carpal_proximal_phalanx_2
| | l_carpal_proximal_interphalangeal_2 : l_carpal_middle_phalanx_2
| | l_carpal_distal_interphalangeal_2 : l_carpal_distal_phalanx_2 ^ l_carpal_distal_phalanx_2_tip, l_dactylion_pt
| l_carpometacarpal_3 : l_metacarpal_3
| | l_metacarpophalangeal_3 : l_carpal_proximal_phalanx_3
| | l_carpal_proximal_interphalangeal_3 : l_carpal_middle_phalanx_3
| | l_carpal_distal_interphalangeal_3 : l_carpal_distal_phalanx_3 ^ l_carpal_distal_phalanx_3_tip
| l_carpometacarpal_4 : l_metacarpal_4
| | l_metacarpophalangeal_4 : l_carpal_proximal_phalanx_4
| | l_carpal_proximal_interphalangeal_4 : l_carpal_middle_phalanx_4
| | l_carpal_distal_interphalangeal_4 : l_carpal_distal_phalanx_4 ^ l_carpal_distal_phalanx_4_tip
| l_carpometacarpal_5 : l_metacarpal_5
| l_metacarpophalangeal_5 : l_carpal_proximal_phalanx_5
| l_carpal_proximal_interphalangeal_5 : l_carpal_middle_phalanx_5
| l_carpal_distal_interphalangeal_5 : l_carpal_distal_phalanx_5 ^ l_carpal_distal_phalanx_5_tip
r_sternoclavicular : r_clavicle ^ r_clavicle_pt
r_acromioclavicular : r_scapula ^ r_acromion_pt, r_axilla_proximal_pt, r_axilla_distal_pt
r_shoulder : r_upperarm ^ r_humeral_medial_epicondyle_pt, r_radiale_pt, r_humeral_lateral_epicondyle_pt
r_elbow : r_forearm ^ r_radial_styloid_pt, r_olecranon_pt
r_radiocarpal : r_carpal ^ r_ulnar_styloid_pt
r_carpometacarpal_1 : r_metacarpal_1
| r_metacarpophalangeal_1 : r_carpal_proximal_phalanx_1
| r_carpal_interphalangeal_1 : r_carpal_distal_phalanx_1 ^ r_carpal_distal_phalanx_1_tip
r_carpometacarpal_2 : r_metacarpal_2 ^ r_metacarpal_phalanx_2_pt
| r_metacarpophalangeal_2 : r_carpal_proximal_phalanx_2
| r_carpal_proximal_interphalangeal_2 : r_carpal_middle_phalanx_2
| r_carpal_distal_interphalangeal_2 : r_carpal_distal_phalanx_2 ^ r_carpal_distal_phalanx_2_tip
r_carpometacarpal_3 : r_metacarpal_3
| r_metacarpophalangeal_3 : r_carpal_proximal_phalanx_3
| r_carpal_proximal_interphalangeal_3 : r_carpal_middle_phalanx_3
| r_carpal_distal_interphalangeal_3 : r_carpal_distal_phalanx_3 ^ r_dactylion_pt, r_carpal_distal_phalanx_3_tip
r_carpometacarpal_4 : r_metacarpal_4
| r_metacarpophalangeal_4 : r_carpal_proximal_phalanx_4
| r_carpal_proximal_interphalangeal_4 : r_carpal_middle_phalanx_4
| r_carpal_distal_interphalangeal_4 : r_carpal_distal_phalanx_4 ^ r_carpal_distal_phalanx_4_tip
r_carpometacarpal_5 : r_metacarpal_5 ^ r_metacarpal_phalanx_5_pt
r_metacarpophalangeal_5 : r_carpal_proximal_phalanx_5
r_carpal_proximal_interphalangeal_5 : r_carpal_middle_phalanx_5
r_carpal_distal_interphalangeal_5 : r_carpal_distal_phalanx_5 ^ r_carpal_distal_phalanx_5_tip
^ HAnimSegment pelvis holds 10 HAnimSite nodes: l_iliocristale_pt, l_trochanterion_pt, r_iliocristale_pt, r_trochanterion_pt, l_asis_pt, r_asis_pt, l_psis_pt, r_psis_pt, floormarker_pt, crotch_pt
^ HAnimSegment l_thigh holds 3 HAnimSite nodes: l_knee_crease_pt, l_femoral_lateral_epicondyle_pt, l_femoral_medial_epicondyle_pt
^ HAnimSegment l_calf holds 2 HAnimSite nodes: l_lateral_malleolus_pt, l_medial_malleolus_pt
^ HAnimSegment l_talus holds 2 HAnimSite nodes: l_sphyrion_pt, l_calcaneus_posterior_pt
^ HAnimSegment l_tarsal_proximal_phalanx_2 holds 1 HAnimSite node: l_metatarsal_phalanx_1_pt
^ HAnimSegment l_tarsal_distal_phalanx_2 holds 2 HAnimSite nodes: l_metatarsal_phalanx_5_pt, l_tarsal_distal_phalanx_2_pt
^ HAnimSegment r_thigh holds 3 HAnimSite nodes: r_knee_crease_pt, r_femoral_lateral_epicondyle_pt, r_femoral_medial_epicondyle_pt
^ HAnimSegment r_calf holds 2 HAnimSite nodes: r_lateral_malleolus_pt, r_medial_malleolus_pt
^ HAnimSegment r_talus holds 2 HAnimSite nodes: r_sphyrion_pt, r_calcaneus_posterior_pt
^ HAnimSegment r_tarsal_proximal_phalanx_2 holds 1 HAnimSite node: r_metatarsal_phalanx_1_pt
^ HAnimSegment r_tarsal_distal_phalanx_2 holds 2 HAnimSite nodes: r_metatarsal_phalanx_5_pt, r_tarsal_distal_phalanx_2_pt
^ HAnimSegment l5 holds 2 HAnimSite nodes: waist_preferred_posterior_pt, navel_pt
^ HAnimSegment l2 holds 3 HAnimSite nodes: r_rib10_pt, l_rib10_pt, rib10_midspine_pt
^ HAnimSegment t10 holds 1 HAnimSite node: substernale_pt
^ HAnimSegment t9 holds 2 HAnimSite nodes: r_thelion_pt, l_thelion_pt
^ HAnimSegment t1 holds 2 HAnimSite nodes: suprasternale_pt, cervicale_pt
^ HAnimSegment c7 holds 2 HAnimSite nodes: r_neck_base_pt, l_neck_base_pt
^ HAnimSegment skull holds 10 HAnimSite nodes: skull_vertex_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
^ HAnimSegment l_clavicle holds 1 HAnimSite node: l_clavicle_pt
^ HAnimSegment l_scapula holds 3 HAnimSite nodes: l_acromion_pt, l_axilla_proximal_pt, l_axilla_distal_pt
^ HAnimSegment l_upperarm holds 3 HAnimSite nodes: l_humeral_medial_epicondyle_pt, l_radiale_pt, l_humeral_lateral_epicondyle_pt
^ HAnimSegment l_forearm holds 2 HAnimSite nodes: l_radial_styloid_pt, l_olecranon_pt
^ HAnimSegment l_carpal holds 3 HAnimSite nodes: l_metacarpal_phalanx_2_pt, l_ulnar_styloid_pt, l_metacarpal_phalanx_5_pt
^ HAnimSegment l_carpal_distal_phalanx_1 holds 1 HAnimSite node: l_carpal_distal_phalanx_1_tip
^ HAnimSegment l_carpal_distal_phalanx_2 holds 2 HAnimSite nodes: l_carpal_distal_phalanx_2_tip, l_dactylion_pt
^ HAnimSegment l_carpal_distal_phalanx_3 holds 1 HAnimSite node: l_carpal_distal_phalanx_3_tip
^ HAnimSegment l_carpal_distal_phalanx_4 holds 1 HAnimSite node: l_carpal_distal_phalanx_4_tip
^ HAnimSegment l_carpal_distal_phalanx_5 holds 1 HAnimSite node: l_carpal_distal_phalanx_5_tip
^ HAnimSegment r_clavicle holds 1 HAnimSite node: r_clavicle_pt
^ HAnimSegment r_scapula holds 3 HAnimSite nodes: r_acromion_pt, r_axilla_proximal_pt, r_axilla_distal_pt
^ HAnimSegment r_upperarm holds 3 HAnimSite nodes: r_humeral_medial_epicondyle_pt, r_radiale_pt, r_humeral_lateral_epicondyle_pt
^ HAnimSegment r_forearm holds 2 HAnimSite nodes: r_radial_styloid_pt, r_olecranon_pt
^ HAnimSegment r_carpal holds 1 HAnimSite node: r_ulnar_styloid_pt
^ HAnimSegment r_carpal_distal_phalanx_1 holds 1 HAnimSite node: r_carpal_distal_phalanx_1_tip
^ HAnimSegment r_metacarpal_2 holds 1 HAnimSite node: r_metacarpal_phalanx_2_pt
^ HAnimSegment r_carpal_distal_phalanx_2 holds 1 HAnimSite node: r_carpal_distal_phalanx_2_tip
^ HAnimSegment r_carpal_distal_phalanx_3 holds 2 HAnimSite nodes: r_dactylion_pt, r_carpal_distal_phalanx_3_tip
^ HAnimSegment r_carpal_distal_phalanx_4 holds 1 HAnimSite node: r_carpal_distal_phalanx_4_tip
^ HAnimSegment r_metacarpal_5 holds 1 HAnimSite node: r_metacarpal_phalanx_5_pt
^ HAnimSegment r_carpal_distal_phalanx_5 holds 1 HAnimSite node: r_carpal_distal_phalanx_5_tip
@ HAnimHumanoid Human holds 1 containerField='skin' node: Shape DEF='SkinShape'
=============================================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes. Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
| <HAnimHumanoid DEF='Joe_Human' name='Human' version ='2.0' > | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1857 |
<Coordinate USE='TheSkinCoord' containerField='skinCoord'/>
|
1858 |
<HAnimJoint USE='Joe_humanoid_root' containerField='joints'/>
|
1859 |
<HAnimJoint USE='Joe_sacroiliac' containerField='joints'/>
|
1860 |
<HAnimJoint USE='Joe_vl5' containerField='joints'/>
|
1861 |
<HAnimJoint USE='Joe_vl4' containerField='joints'/>
|
1862 |
<HAnimJoint USE='Joe_vl3' containerField='joints'/>
|
1863 |
<HAnimJoint USE='Joe_vl2' containerField='joints'/>
|
1864 |
<HAnimJoint USE='Joe_vl1' containerField='joints'/>
|
1865 |
<HAnimJoint USE='Joe_vt12' containerField='joints'/>
|
1866 |
<HAnimJoint USE='Joe_vt11' containerField='joints'/>
|
1867 |
<HAnimJoint USE='Joe_vt10' containerField='joints'/>
|
1868 |
<HAnimJoint USE='Joe_vt9' containerField='joints'/>
|
1869 |
<HAnimJoint USE='Joe_vt8' containerField='joints'/>
|
1870 |
<HAnimJoint USE='Joe_vt7' containerField='joints'/>
|
1871 |
<HAnimJoint USE='Joe_vt6' containerField='joints'/>
|
1872 |
<HAnimJoint USE='Joe_vt5' containerField='joints'/>
|
1873 |
<HAnimJoint USE='Joe_vt4' containerField='joints'/>
|
1874 |
<HAnimJoint USE='Joe_vt3' containerField='joints'/>
|
1875 |
<HAnimJoint USE='Joe_vt2' containerField='joints'/>
|
1876 |
<HAnimJoint USE='Joe_vt1' containerField='joints'/>
|
1877 |
<HAnimJoint USE='Joe_vc7' containerField='joints'/>
|
1878 |
<HAnimJoint USE='Joe_vc6' containerField='joints'/>
|
1879 |
<HAnimJoint USE='Joe_vc5' containerField='joints'/>
|
1880 |
<HAnimJoint USE='Joe_vc4' containerField='joints'/>
|
1881 |
<HAnimJoint USE='Joe_vc3' containerField='joints'/>
|
1882 |
<HAnimJoint USE='Joe_vc2' containerField='joints'/>
|
1883 |
<HAnimJoint USE='Joe_vc1' containerField='joints'/>
|
1884 |
<HAnimJoint USE='Joe_skullbase' containerField='joints'/>
|
1885 |
<HAnimJoint USE='Joe_l_acromioclavicular' containerField='joints'/>
|
1886 |
<HAnimJoint USE='Joe_r_acromioclavicular' containerField='joints'/>
|
1887 |
<HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_2' containerField='joints'/>
|
1888 |
<HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_2' containerField='joints'/>
|
1889 |
<HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_3' containerField='joints'/>
|
1890 |
<HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_3' containerField='joints'/>
|
1891 |
<HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_4' containerField='joints'/>
|
1892 |
<HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_4' containerField='joints'/>
|
1893 |
<HAnimJoint USE='Joe_l_carpal_distal_interphalangeal_5' containerField='joints'/>
|
1894 |
<HAnimJoint USE='Joe_r_carpal_distal_interphalangeal_5' containerField='joints'/>
|
1895 |
<HAnimJoint USE='Joe_l_carpal_interphalangeal_1' containerField='joints'/>
|
1896 |
<HAnimJoint USE='Joe_r_carpal_interphalangeal_1' containerField='joints'/>
|
1897 |
<HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_2' containerField='joints'/>
|
1898 |
<HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_2' containerField='joints'/>
|
1899 |
<HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_3' containerField='joints'/>
|
1900 |
<HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_3' containerField='joints'/>
|
1901 |
<HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_4' containerField='joints'/>
|
1902 |
<HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_4' containerField='joints'/>
|
1903 |
<HAnimJoint USE='Joe_l_carpal_proximal_interphalangeal_5' containerField='joints'/>
|
1904 |
<HAnimJoint USE='Joe_r_carpal_proximal_interphalangeal_5' containerField='joints'/>
|
1905 |
<HAnimJoint USE='Joe_l_carpometacarpal_1' containerField='joints'/>
|
1906 |
<HAnimJoint USE='Joe_r_carpometacarpal_1' containerField='joints'/>
|
1907 |
<HAnimJoint USE='Joe_l_carpometacarpal_2' containerField='joints'/>
|
1908 |
<HAnimJoint USE='Joe_r_carpometacarpal_2' containerField='joints'/>
|
1909 |
<HAnimJoint USE='Joe_l_carpometacarpal_3' containerField='joints'/>
|
1910 |
<HAnimJoint USE='Joe_r_carpometacarpal_3' containerField='joints'/>
|
1911 |
<HAnimJoint USE='Joe_l_carpometacarpal_4' containerField='joints'/>
|
1912 |
<HAnimJoint USE='Joe_r_carpometacarpal_4' containerField='joints'/>
|
1913 |
<HAnimJoint USE='Joe_l_carpometacarpal_5' containerField='joints'/>
|
1914 |
<HAnimJoint USE='Joe_r_carpometacarpal_5' containerField='joints'/>
|
1915 |
<HAnimJoint USE='Joe_l_elbow' containerField='joints'/>
|
1916 |
<HAnimJoint USE='Joe_r_elbow' containerField='joints'/>
|
1917 |
<HAnimJoint USE='Joe_l_eyeball_joint' containerField='joints'/>
|
1918 |
<HAnimJoint USE='Joe_r_eyeball_joint' containerField='joints'/>
|
1919 |
<HAnimJoint USE='Joe_l_hip' containerField='joints'/>
|
1920 |
<HAnimJoint USE='Joe_r_hip' containerField='joints'/>
|
1921 |
<HAnimJoint USE='Joe_l_knee' containerField='joints'/>
|
1922 |
<HAnimJoint USE='Joe_r_knee' containerField='joints'/>
|
1923 |
<HAnimJoint USE='Joe_l_metacarpophalangeal_1' containerField='joints'/>
|
1924 |
<HAnimJoint USE='Joe_r_metacarpophalangeal_1' containerField='joints'/>
|
1925 |
<HAnimJoint USE='Joe_l_metacarpophalangeal_2' containerField='joints'/>
|
1926 |
<HAnimJoint USE='Joe_r_metacarpophalangeal_2' containerField='joints'/>
|
1927 |
<HAnimJoint USE='Joe_l_metacarpophalangeal_3' containerField='joints'/>
|
1928 |
<HAnimJoint USE='Joe_r_metacarpophalangeal_3' containerField='joints'/>
|
1929 |
<HAnimJoint USE='Joe_l_metacarpophalangeal_4' containerField='joints'/>
|
1930 |
<HAnimJoint USE='Joe_r_metacarpophalangeal_4' containerField='joints'/>
|
1931 |
<HAnimJoint USE='Joe_l_metacarpophalangeal_5' containerField='joints'/>
|
1932 |
<HAnimJoint USE='Joe_r_metacarpophalangeal_5' containerField='joints'/>
|
1933 |
<HAnimJoint USE='Joe_l_metatarsal' containerField='joints'/>
|
1934 |
<HAnimJoint USE='Joe_l_metatarsophalangeal_2' containerField='joints'/>
|
1935 |
<HAnimJoint USE='Joe_r_metatarsophalangeal_2' containerField='joints'/>
|
1936 |
<HAnimJoint USE='Joe_l_radiocarpal' containerField='joints'/>
|
1937 |
<HAnimJoint USE='Joe_r_radiocarpal' containerField='joints'/>
|
1938 |
<HAnimJoint USE='Joe_l_shoulder' containerField='joints'/>
|
1939 |
<HAnimJoint USE='Joe_r_shoulder' containerField='joints'/>
|
1940 |
<HAnimJoint USE='Joe_l_sternoclavicular' containerField='joints'/>
|
1941 |
<HAnimJoint USE='Joe_r_sternoclavicular' containerField='joints'/>
|
1942 |
<HAnimJoint USE='Joe_l_talocrural' containerField='joints'/>
|
1943 |
<HAnimJoint USE='Joe_r_talocrural' containerField='joints'/>
|
1944 |
<HAnimJoint USE='Joe_r_tarsal_distal_interphalangeal_2' containerField='joints'/>
|
1945 |
<HAnimJoint USE='Joe_l_tarsometatarsal_2' containerField='joints'/>
|
1946 |
<HAnimJoint USE='Joe_r_tarsometatarsal_2' containerField='joints'/>
|
1947 |
<HAnimSegment USE='Joe_c1' containerField='segments'/>
|
1948 |
<HAnimSegment USE='Joe_c2' containerField='segments'/>
|
1949 |
<HAnimSegment USE='Joe_c3' containerField='segments'/>
|
1950 |
<HAnimSegment USE='Joe_c4' containerField='segments'/>
|
1951 |
<HAnimSegment USE='Joe_c5' containerField='segments'/>
|
1952 |
<HAnimSegment USE='Joe_c6' containerField='segments'/>
|
1953 |
<HAnimSegment USE='Joe_c7' containerField='segments'/>
|
1954 |
<HAnimSegment USE='Joe_l1' containerField='segments'/>
|
1955 |
<HAnimSegment USE='Joe_l2' containerField='segments'/>
|
1956 |
<HAnimSegment USE='Joe_l3' containerField='segments'/>
|
1957 |
<HAnimSegment USE='Joe_l4' containerField='segments'/>
|
1958 |
<HAnimSegment USE='Joe_l5' containerField='segments'/>
|
1959 |
<HAnimSegment USE='Joe_pelvis' containerField='segments'/>
|
1960 |
<HAnimSegment USE='Joe_sacrum' containerField='segments'/>
|
1961 |
<HAnimSegment USE='Joe_skull' containerField='segments'/>
|
1962 |
<HAnimSegment USE='Joe_t1' containerField='segments'/>
|
1963 |
<HAnimSegment USE='Joe_t10' containerField='segments'/>
|
1964 |
<HAnimSegment USE='Joe_t11' containerField='segments'/>
|
1965 |
<HAnimSegment USE='Joe_t12' containerField='segments'/>
|
1966 |
<HAnimSegment USE='Joe_t2' containerField='segments'/>
|
1967 |
<HAnimSegment USE='Joe_t3' containerField='segments'/>
|
1968 |
<HAnimSegment USE='Joe_t4' containerField='segments'/>
|
1969 |
<HAnimSegment USE='Joe_t5' containerField='segments'/>
|
1970 |
<HAnimSegment USE='Joe_t6' containerField='segments'/>
|
1971 |
<HAnimSegment USE='Joe_t7' containerField='segments'/>
|
1972 |
<HAnimSegment USE='Joe_t8' containerField='segments'/>
|
1973 |
<HAnimSegment USE='Joe_t9' containerField='segments'/>
|
1974 |
<HAnimSegment USE='Joe_toPelvis' containerField='segments'/>
|
1975 |
<HAnimSegment USE='Joe_l_calf' containerField='segments'/>
|
1976 |
<HAnimSegment USE='Joe_r_calf' containerField='segments'/>
|
1977 |
<HAnimSegment USE='Joe_l_carpal' containerField='segments'/>
|
1978 |
<HAnimSegment USE='Joe_r_carpal' containerField='segments'/>
|
1979 |
<HAnimSegment USE='Joe_l_carpal_distal_phalanx_1' containerField='segments'/>
|
1980 |
<HAnimSegment USE='Joe_r_carpal_distal_phalanx_1' containerField='segments'/>
|
1981 |
<HAnimSegment USE='Joe_l_carpal_distal_phalanx_2' containerField='segments'/>
|
1982 |
<HAnimSegment USE='Joe_r_carpal_distal_phalanx_2' containerField='segments'/>
|
1983 |
<HAnimSegment USE='Joe_l_carpal_distal_phalanx_3' containerField='segments'/>
|
1984 |
<HAnimSegment USE='Joe_r_carpal_distal_phalanx_3' containerField='segments'/>
|
1985 |
<HAnimSegment USE='Joe_l_carpal_distal_phalanx_4' containerField='segments'/>
|
1986 |
<HAnimSegment USE='Joe_r_carpal_distal_phalanx_4' containerField='segments'/>
|
1987 |
<HAnimSegment USE='Joe_l_carpal_distal_phalanx_5' containerField='segments'/>
|
1988 |
<HAnimSegment USE='Joe_r_carpal_distal_phalanx_5' containerField='segments'/>
|
1989 |
<HAnimSegment USE='Joe_l_carpal_middle_phalanx_2' containerField='segments'/>
|
1990 |
<HAnimSegment USE='Joe_r_carpal_middle_phalanx_2' containerField='segments'/>
|
1991 |
<HAnimSegment USE='Joe_l_carpal_middle_phalanx_3' containerField='segments'/>
|
1992 |
<HAnimSegment USE='Joe_r_carpal_middle_phalanx_3' containerField='segments'/>
|
1993 |
<HAnimSegment USE='Joe_l_carpal_middle_phalanx_4' containerField='segments'/>
|
1994 |
<HAnimSegment USE='Joe_r_carpal_middle_phalanx_4' containerField='segments'/>
|
1995 |
<HAnimSegment USE='Joe_l_carpal_middle_phalanx_5' containerField='segments'/>
|
1996 |
<HAnimSegment USE='Joe_r_carpal_middle_phalanx_5' containerField='segments'/>
|
1997 |
<HAnimSegment USE='Joe_l_carpal_proximal_phalanx_1' containerField='segments'/>
|
1998 |
<HAnimSegment USE='Joe_r_carpal_proximal_phalanx_1' containerField='segments'/>
|
1999 |
<HAnimSegment USE='Joe_l_carpal_proximal_phalanx_2' containerField='segments'/>
|
2000 |
<HAnimSegment USE='Joe_r_carpal_proximal_phalanx_2' containerField='segments'/>
|
2001 |
<HAnimSegment USE='Joe_l_carpal_proximal_phalanx_3' containerField='segments'/>
|
2002 |
<HAnimSegment USE='Joe_r_carpal_proximal_phalanx_3' containerField='segments'/>
|
2003 |
<HAnimSegment USE='Joe_l_carpal_proximal_phalanx_4' containerField='segments'/>
|
2004 |
<HAnimSegment USE='Joe_r_carpal_proximal_phalanx_4' containerField='segments'/>
|
2005 |
<HAnimSegment USE='Joe_l_carpal_proximal_phalanx_5' containerField='segments'/>
|
2006 |
<HAnimSegment USE='Joe_r_carpal_proximal_phalanx_5' containerField='segments'/>
|
2007 |
<HAnimSegment USE='Joe_l_clavicle' containerField='segments'/>
|
2008 |
<HAnimSegment USE='Joe_r_clavicle' containerField='segments'/>
|
2009 |
<HAnimSegment USE='Joe_l_eyeball' containerField='segments'/>
|
2010 |
<HAnimSegment USE='Joe_r_eyeball' containerField='segments'/>
|
2011 |
<HAnimSegment USE='Joe_l_forearm' containerField='segments'/>
|
2012 |
<HAnimSegment USE='Joe_r_forearm' containerField='segments'/>
|
2013 |
<HAnimSegment USE='Joe_l_metacarpal_1' containerField='segments'/>
|
2014 |
<HAnimSegment USE='Joe_r_metacarpal_1' containerField='segments'/>
|
2015 |
<HAnimSegment USE='Joe_l_metacarpal_2' containerField='segments'/>
|
2016 |
<HAnimSegment USE='Joe_r_metacarpal_2' containerField='segments'/>
|
2017 |
<HAnimSegment USE='Joe_l_metacarpal_3' containerField='segments'/>
|
2018 |
<HAnimSegment USE='Joe_r_metacarpal_3' containerField='segments'/>
|
2019 |
<HAnimSegment USE='Joe_l_metacarpal_4' containerField='segments'/>
|
2020 |
<HAnimSegment USE='Joe_r_metacarpal_4' containerField='segments'/>
|
2021 |
<HAnimSegment USE='Joe_l_metacarpal_5' containerField='segments'/>
|
2022 |
<HAnimSegment USE='Joe_r_metacarpal_5' containerField='segments'/>
|
2023 |
<HAnimSegment USE='Joe_l_metatarsal_2' containerField='segments'/>
|
2024 |
<HAnimSegment USE='Joe_r_metatarsal_2' containerField='segments'/>
|
2025 |
<HAnimSegment USE='Joe_l_scapula' containerField='segments'/>
|
2026 |
<HAnimSegment USE='Joe_r_scapula' containerField='segments'/>
|
2027 |
<HAnimSegment USE='Joe_l_talus' containerField='segments'/>
|
2028 |
<HAnimSegment USE='Joe_r_talus' containerField='segments'/>
|
2029 |
<HAnimSegment USE='Joe_l_tarsal_distal_phalanx_2' containerField='segments'/>
|
2030 |
<HAnimSegment USE='Joe_r_tarsal_distal_phalanx_2' containerField='segments'/>
|
2031 |
<HAnimSegment USE='Joe_l_tarsal_proximal_phalanx_2' containerField='segments'/>
|
2032 |
<HAnimSegment USE='Joe_r_tarsal_proximal_phalanx_2' containerField='segments'/>
|
2033 |
<HAnimSegment USE='Joe_l_thigh' containerField='segments'/>
|
2034 |
<HAnimSegment USE='Joe_r_thigh' containerField='segments'/>
|
2035 |
<HAnimSegment USE='Joe_l_upperarm' containerField='segments'/>
|
2036 |
<HAnimSegment USE='Joe_r_upperarm' containerField='segments'/>
|
2037 |
<HAnimSite USE='Joe_cervicale_pt' containerField='sites'/>
|
2038 |
<HAnimSite USE='Joe_crotch_pt' containerField='sites'/>
|
2039 |
<HAnimSite USE='Joe_floormarker_pt' containerField='sites'/>
|
2040 |
<HAnimSite USE='Joe_navel_pt' containerField='sites'/>
|
2041 |
<HAnimSite USE='Joe_nuchale_pt' containerField='sites'/>
|
2042 |
<HAnimSite USE='Joe_rib10_midspine_pt' containerField='sites'/>
|
2043 |
<HAnimSite USE='Joe_sellion_pt' containerField='sites'/>
|
2044 |
<HAnimSite USE='Joe_skull_vertex_tip' containerField='sites'/>
|
2045 |
<HAnimSite USE='Joe_substernale_pt' containerField='sites'/>
|
2046 |
<HAnimSite USE='Joe_supramenton_pt' containerField='sites'/>
|
2047 |
<HAnimSite USE='Joe_suprasternale_pt' containerField='sites'/>
|
2048 |
<HAnimSite USE='Joe_waist_preferred_posterior_pt' containerField='sites'/>
|
2049 |
<HAnimSite USE='Joe_l_acromion_pt' containerField='sites'/>
|
2050 |
<HAnimSite USE='Joe_r_acromion_pt' containerField='sites'/>
|
2051 |
<HAnimSite USE='Joe_l_asis_pt' containerField='sites'/>
|
2052 |
<HAnimSite USE='Joe_r_asis_pt' containerField='sites'/>
|
2053 |
<HAnimSite USE='Joe_l_axilla_distal_pt' containerField='sites'/>
|
2054 |
<HAnimSite USE='Joe_r_axilla_distal_pt' containerField='sites'/>
|
2055 |
<HAnimSite USE='Joe_l_axilla_proximal_pt' containerField='sites'/>
|
2056 |
<HAnimSite USE='Joe_r_axilla_proximal_pt' containerField='sites'/>
|
2057 |
<HAnimSite USE='Joe_l_calcaneus_posterior_pt' containerField='sites'/>
|
2058 |
<HAnimSite USE='Joe_r_calcaneus_posterior_pt' containerField='sites'/>
|
2059 |
<HAnimSite USE='Joe_l_carpal_distal_phalanx_1_tip' containerField='sites'/>
|
2060 |
<HAnimSite USE='Joe_r_carpal_distal_phalanx_1_tip' containerField='sites'/>
|
2061 |
<HAnimSite USE='Joe_l_carpal_distal_phalanx_2_tip' containerField='sites'/>
|
2062 |
<HAnimSite USE='Joe_r_carpal_distal_phalanx_2_tip' containerField='sites'/>
|
2063 |
<HAnimSite USE='Joe_l_carpal_distal_phalanx_3_tip' containerField='sites'/>
|
2064 |
<HAnimSite USE='Joe_r_carpal_distal_phalanx_3_tip' containerField='sites'/>
|
2065 |
<HAnimSite USE='Joe_l_carpal_distal_phalanx_4_tip' containerField='sites'/>
|
2066 |
<HAnimSite USE='Joe_r_carpal_distal_phalanx_4_tip' containerField='sites'/>
|
2067 |
<HAnimSite USE='Joe_l_carpal_distal_phalanx_5_tip' containerField='sites'/>
|
2068 |
<HAnimSite USE='Joe_r_carpal_distal_phalanx_5_tip' containerField='sites'/>
|
2069 |
<HAnimSite USE='Joe_l_clavicle_pt' containerField='sites'/>
|
2070 |
<HAnimSite USE='Joe_r_clavicle_pt' containerField='sites'/>
|
2071 |
<HAnimSite USE='Joe_l_dactylion_pt' containerField='sites'/>
|
2072 |
<HAnimSite USE='Joe_r_dactylion_pt' containerField='sites'/>
|
2073 |
<HAnimSite USE='Joe_l_femoral_lateral_epicondyle_pt' containerField='sites'/>
|
2074 |
<HAnimSite USE='Joe_r_femoral_lateral_epicondyle_pt' containerField='sites'/>
|
2075 |
<HAnimSite USE='Joe_l_femoral_medial_epicondyle_pt' containerField='sites'/>
|
2076 |
<HAnimSite USE='Joe_r_femoral_medial_epicondyle_pt' containerField='sites'/>
|
2077 |
<HAnimSite USE='Joe_l_gonion_pt' containerField='sites'/>
|
2078 |
<HAnimSite USE='Joe_r_gonion_pt' containerField='sites'/>
|
2079 |
<HAnimSite USE='Joe_l_humeral_lateral_epicondyle_pt' containerField='sites'/>
|
2080 |
<HAnimSite USE='Joe_r_humeral_lateral_epicondyle_pt' containerField='sites'/>
|
2081 |
<HAnimSite USE='Joe_l_humeral_medial_epicondyle_pt' containerField='sites'/>
|
2082 |
<HAnimSite USE='Joe_r_humeral_medial_epicondyle_pt' containerField='sites'/>
|
2083 |
<HAnimSite USE='Joe_l_iliocristale_pt' containerField='sites'/>
|
2084 |
<HAnimSite USE='Joe_r_iliocristale_pt' containerField='sites'/>
|
2085 |
<HAnimSite USE='Joe_l_infraorbitale_pt' containerField='sites'/>
|
2086 |
<HAnimSite USE='Joe_r_infraorbitale_pt' containerField='sites'/>
|
2087 |
<HAnimSite USE='Joe_l_knee_crease_pt' containerField='sites'/>
|
2088 |
<HAnimSite USE='Joe_r_knee_crease_pt' containerField='sites'/>
|
2089 |
<HAnimSite USE='Joe_l_lateral_malleolus_pt' containerField='sites'/>
|
2090 |
<HAnimSite USE='Joe_r_lateral_malleolus_pt' containerField='sites'/>
|
2091 |
<HAnimSite USE='Joe_l_medial_malleolus_pt' containerField='sites'/>
|
2092 |
<HAnimSite USE='Joe_r_medial_malleolus_pt' containerField='sites'/>
|
2093 |
<HAnimSite USE='Joe_l_metacarpal_phalanx_2_pt' containerField='sites'/>
|
2094 |
<HAnimSite USE='Joe_r_metacarpal_phalanx_2_pt' containerField='sites'/>
|
2095 |
<HAnimSite USE='Joe_l_metacarpal_phalanx_5_pt' containerField='sites'/>
|
2096 |
<HAnimSite USE='Joe_r_metacarpal_phalanx_5_pt' containerField='sites'/>
|
2097 |
<HAnimSite USE='Joe_l_metatarsal_phalanx_1_pt' containerField='sites'/>
|
2098 |
<HAnimSite USE='Joe_r_metatarsal_phalanx_1_pt' containerField='sites'/>
|
2099 |
<HAnimSite USE='Joe_l_metatarsal_phalanx_5_pt' containerField='sites'/>
|
2100 |
<HAnimSite USE='Joe_r_metatarsal_phalanx_5_pt' containerField='sites'/>
|
2101 |
<HAnimSite USE='Joe_l_neck_base_pt' containerField='sites'/>
|
2102 |
<HAnimSite USE='Joe_r_neck_base_pt' containerField='sites'/>
|
2103 |
<HAnimSite USE='Joe_l_olecranon_pt' containerField='sites'/>
|
2104 |
<HAnimSite USE='Joe_r_olecranon_pt' containerField='sites'/>
|
2105 |
<HAnimSite USE='Joe_l_psis_pt' containerField='sites'/>
|
2106 |
<HAnimSite USE='Joe_r_psis_pt' containerField='sites'/>
|
2107 |
<HAnimSite USE='Joe_l_radial_styloid_pt' containerField='sites'/>
|
2108 |
<HAnimSite USE='Joe_r_radial_styloid_pt' containerField='sites'/>
|
2109 |
<HAnimSite USE='Joe_l_radiale_pt' containerField='sites'/>
|
2110 |
<HAnimSite USE='Joe_r_radiale_pt' containerField='sites'/>
|
2111 |
<HAnimSite USE='Joe_l_rib10_pt' containerField='sites'/>
|
2112 |
<HAnimSite USE='Joe_r_rib10_pt' containerField='sites'/>
|
2113 |
<HAnimSite USE='Joe_l_sphyrion_pt' containerField='sites'/>
|
2114 |
<HAnimSite USE='Joe_r_sphyrion_pt' containerField='sites'/>
|
2115 |
<HAnimSite USE='Joe_l_tarsal_distal_phalanx_2_pt' containerField='sites'/>
|
2116 |
<HAnimSite USE='Joe_r_tarsal_distal_phalanx_2_pt' containerField='sites'/>
|
2117 |
<HAnimSite USE='Joe_l_thelion_pt' containerField='sites'/>
|
2118 |
<HAnimSite USE='Joe_r_thelion_pt' containerField='sites'/>
|
2119 |
<HAnimSite USE='Joe_l_tragion_pt' containerField='sites'/>
|
2120 |
<HAnimSite USE='Joe_r_tragion_pt' containerField='sites'/>
|
2121 |
<HAnimSite USE='Joe_l_trochanterion_pt' containerField='sites'/>
|
2122 |
<HAnimSite USE='Joe_r_trochanterion_pt' containerField='sites'/>
|
2123 |
<HAnimSite USE='Joe_l_ulnar_styloid_pt' containerField='sites'/>
|
2124 |
<HAnimSite USE='Joe_r_ulnar_styloid_pt' containerField='sites'/>
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
</HAnimHumanoid> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Event Graph ROUTE Table entries with 103 ROUTE connections total, showing X3D event-model relationships for this scene.
Each row shows an event cascade that may occur during a single timestamp interval between frame renderings, as part of the X3D execution model.
|
Time3
TimeSensor fraction_changed SFFloat |
EyeballsRotation
OrientationInterpolator set_fraction SFFloat |
then
|
EyeballsRotation
OrientationInterpolator value_changed SFRotation |
Joe_r_eyeball_joint
HAnimJoint set_rotation SFRotation |
||
|
then
|
EyeballsRotation
OrientationInterpolator value_changed SFRotation |
Joe_l_eyeball_joint
HAnimJoint set_rotation SFRotation |
||||
<!--
Online at
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}