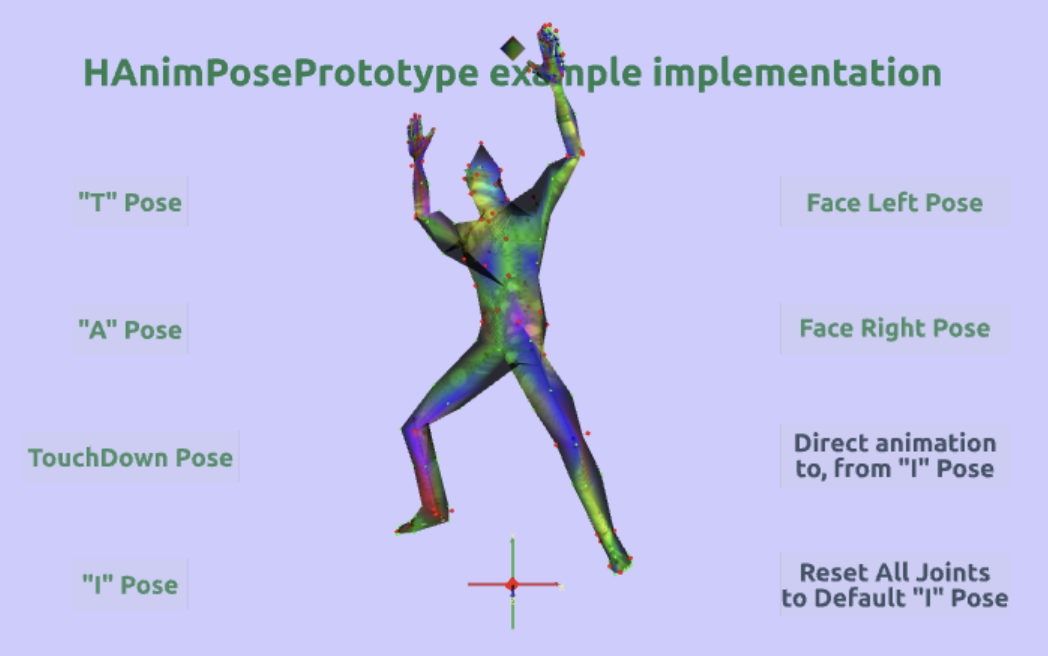
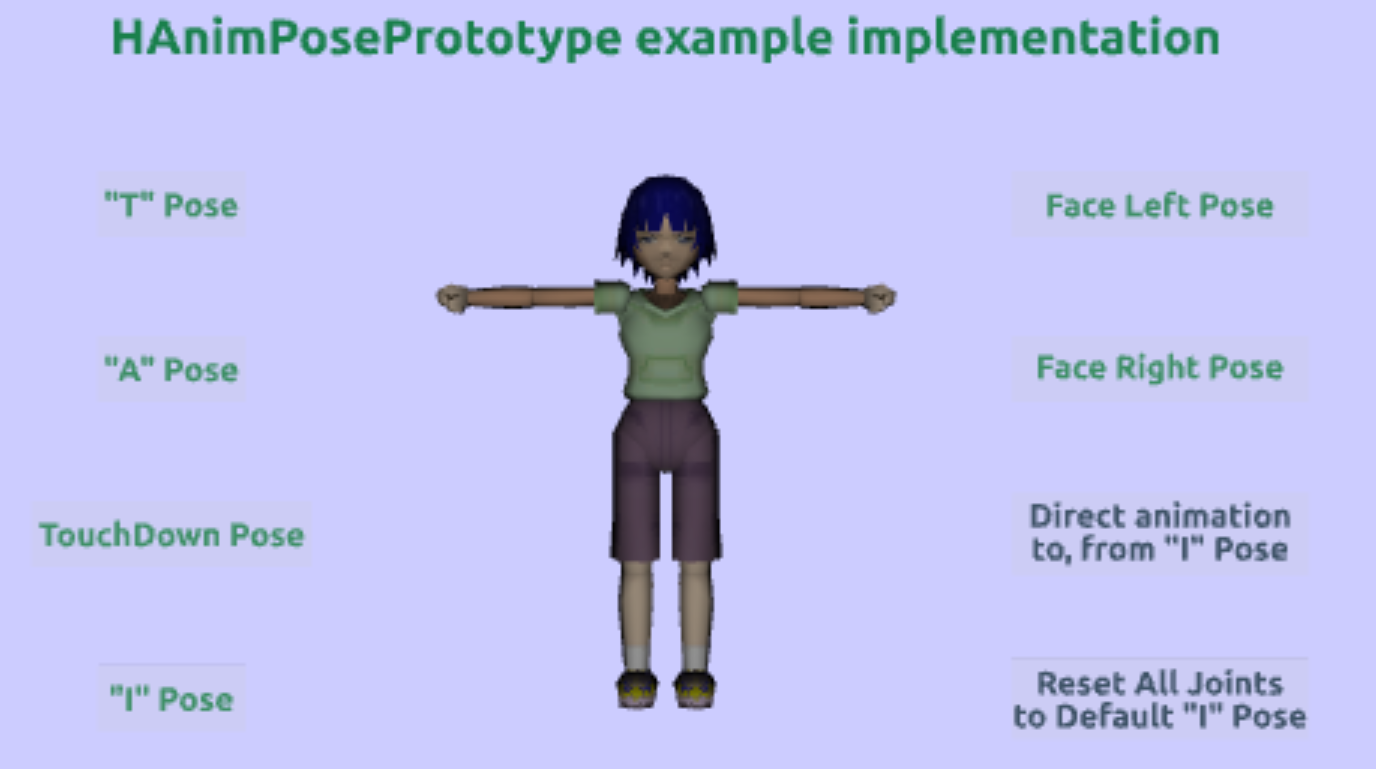
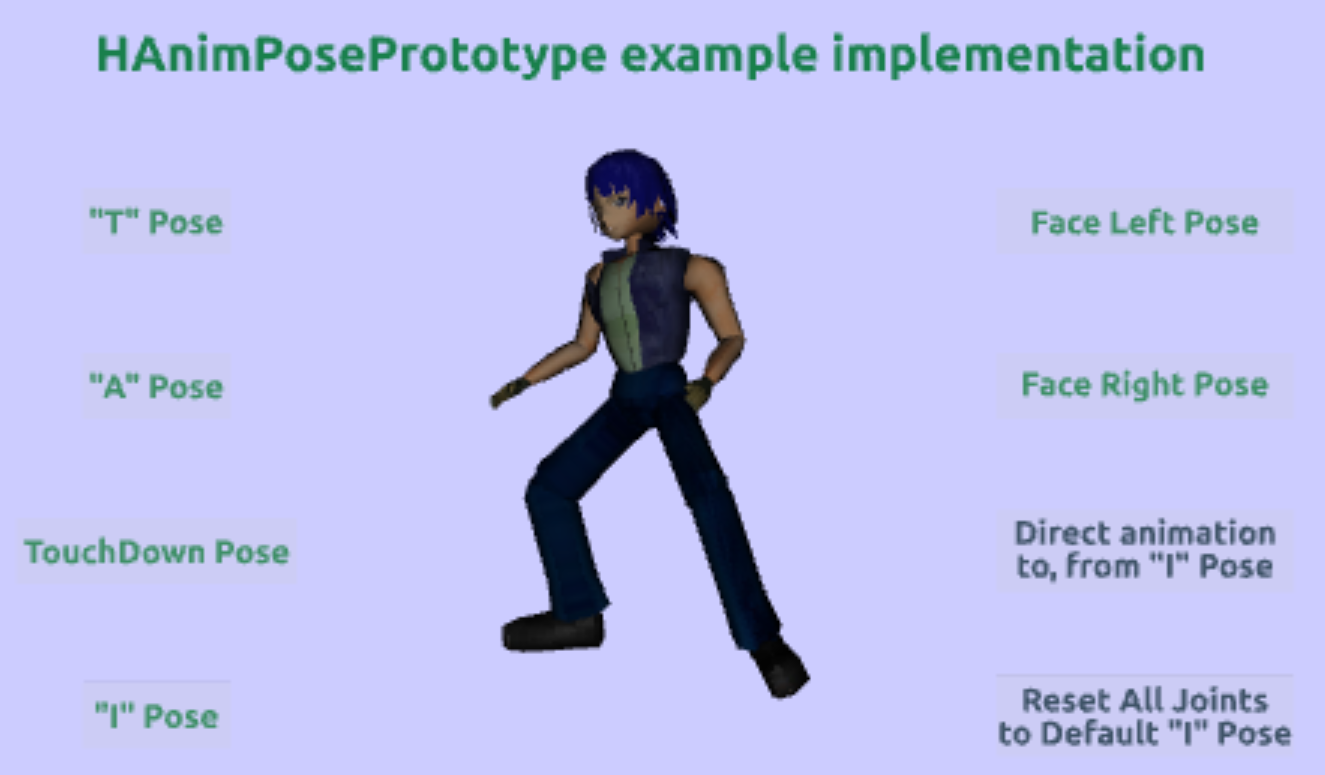
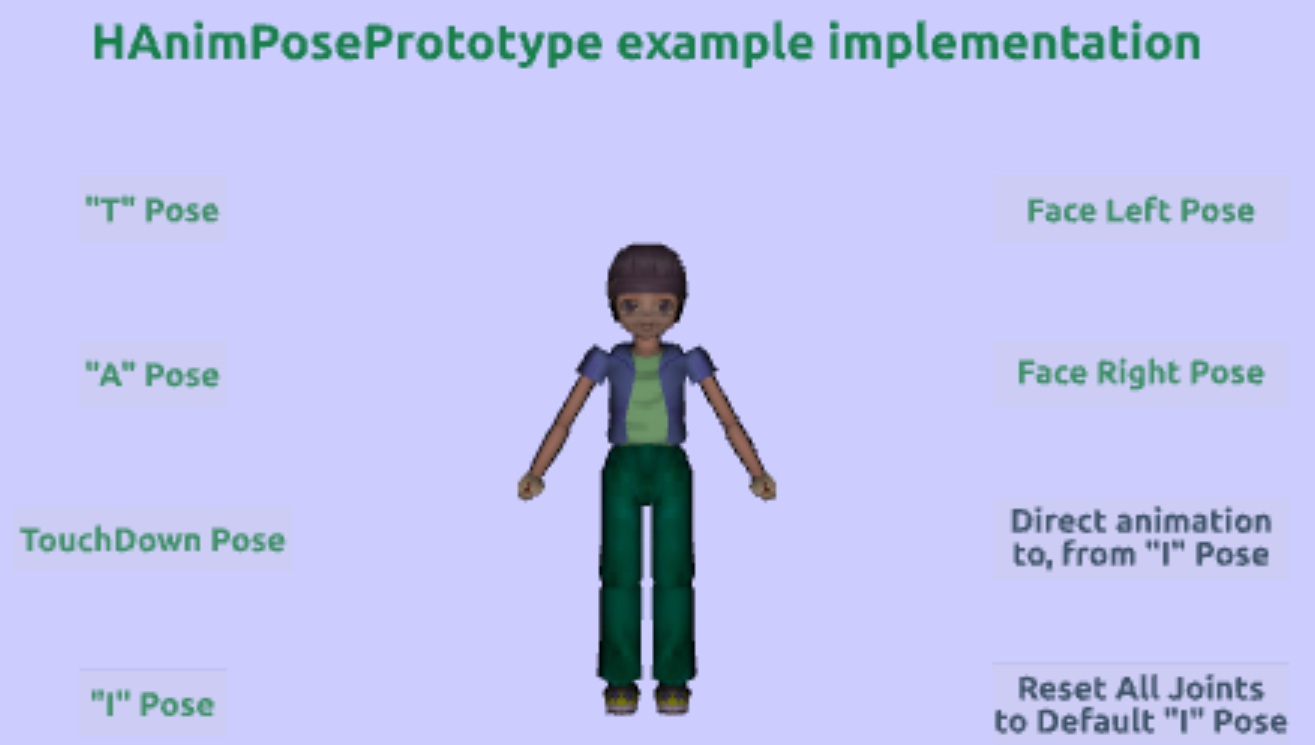
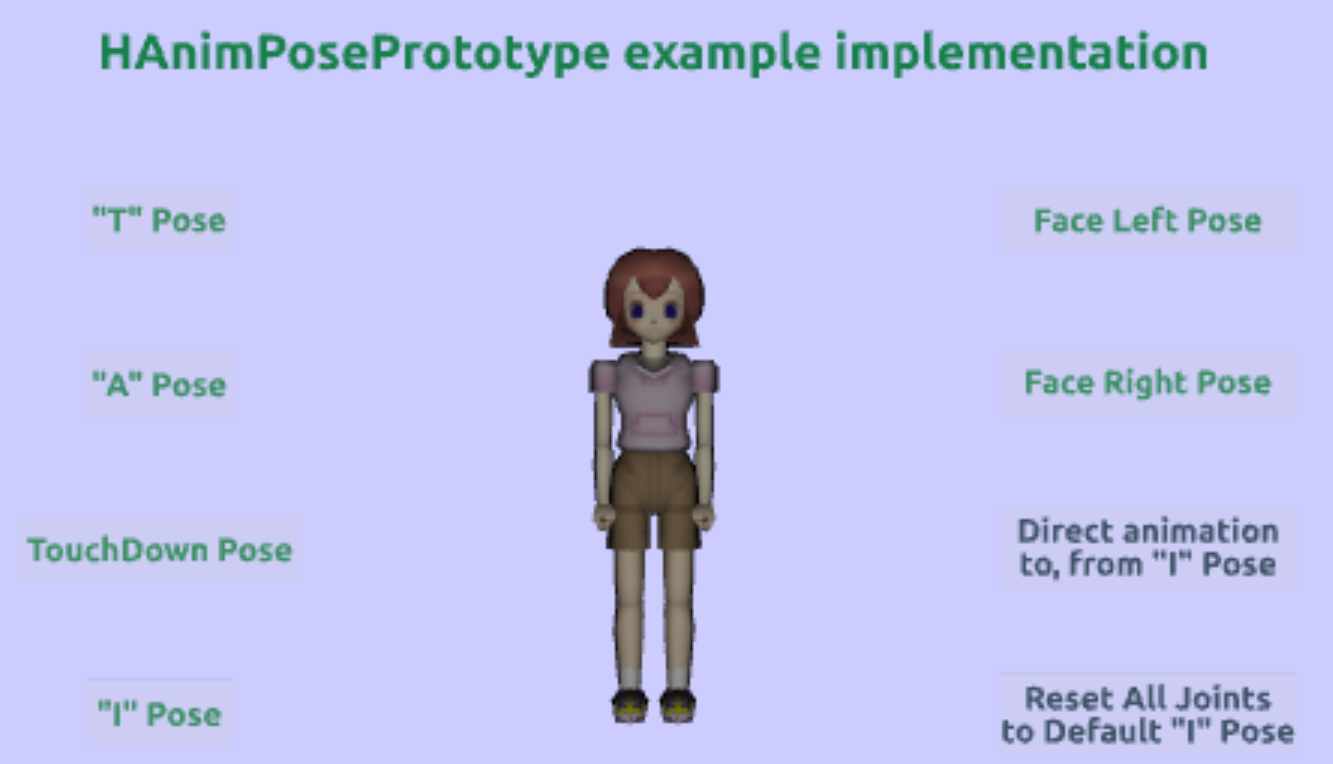
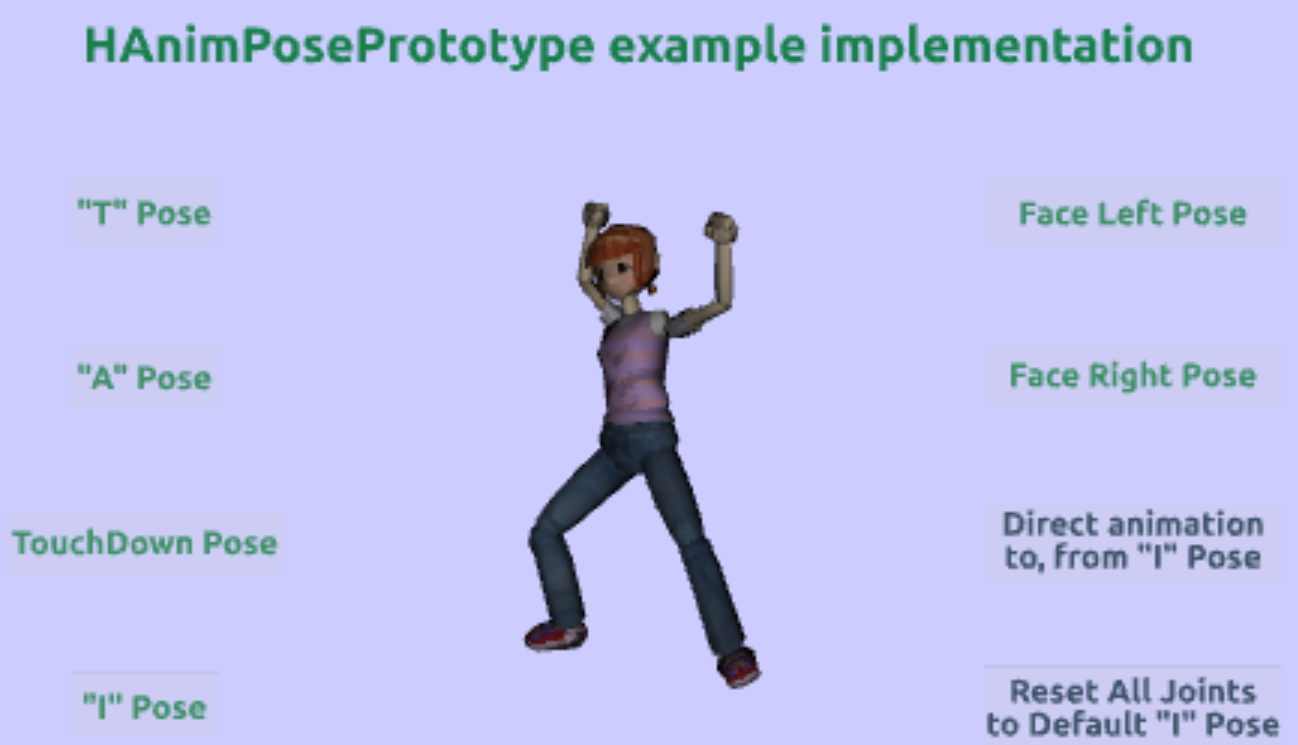
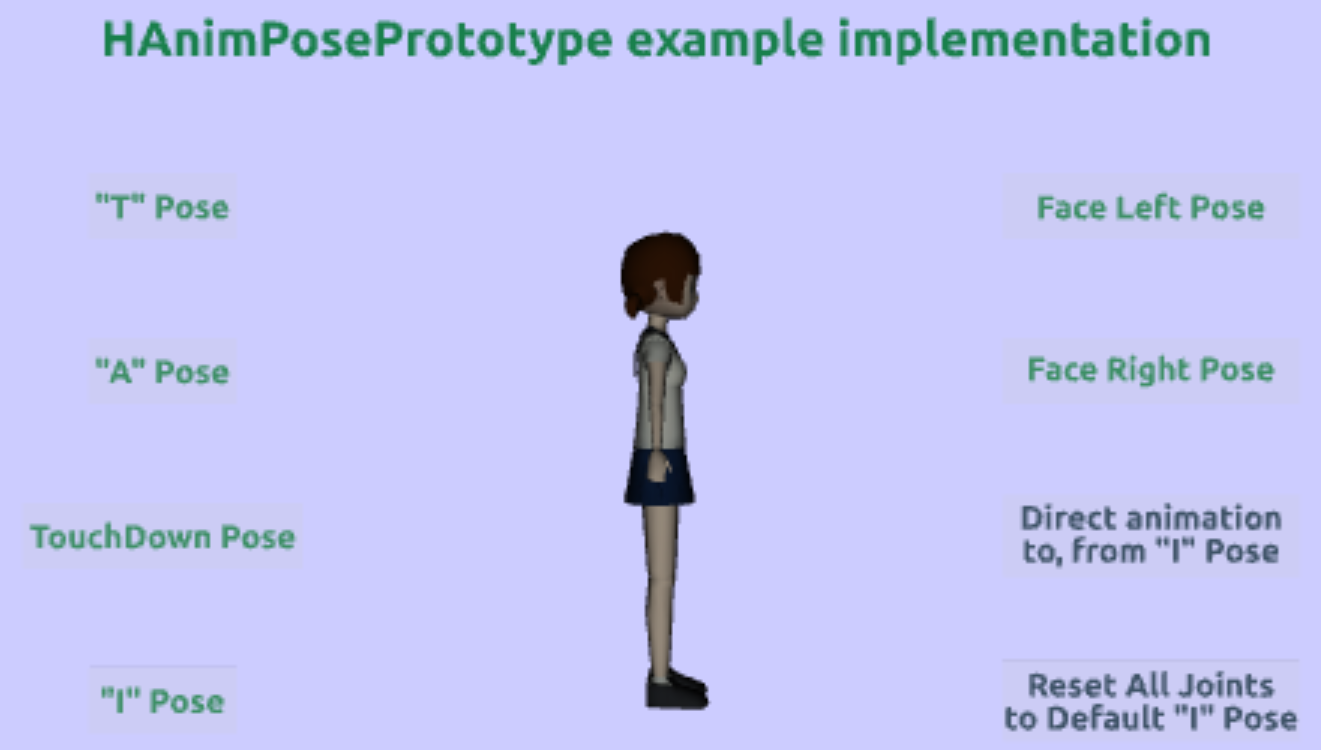
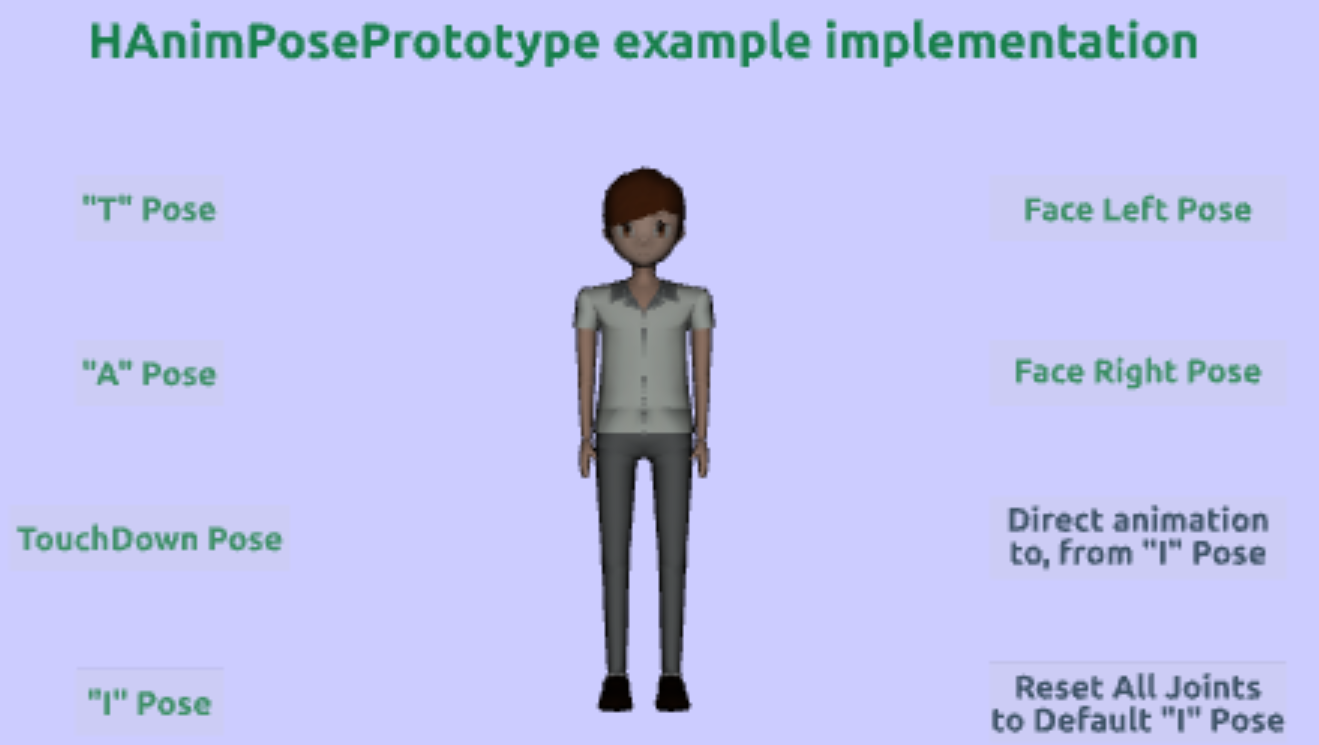
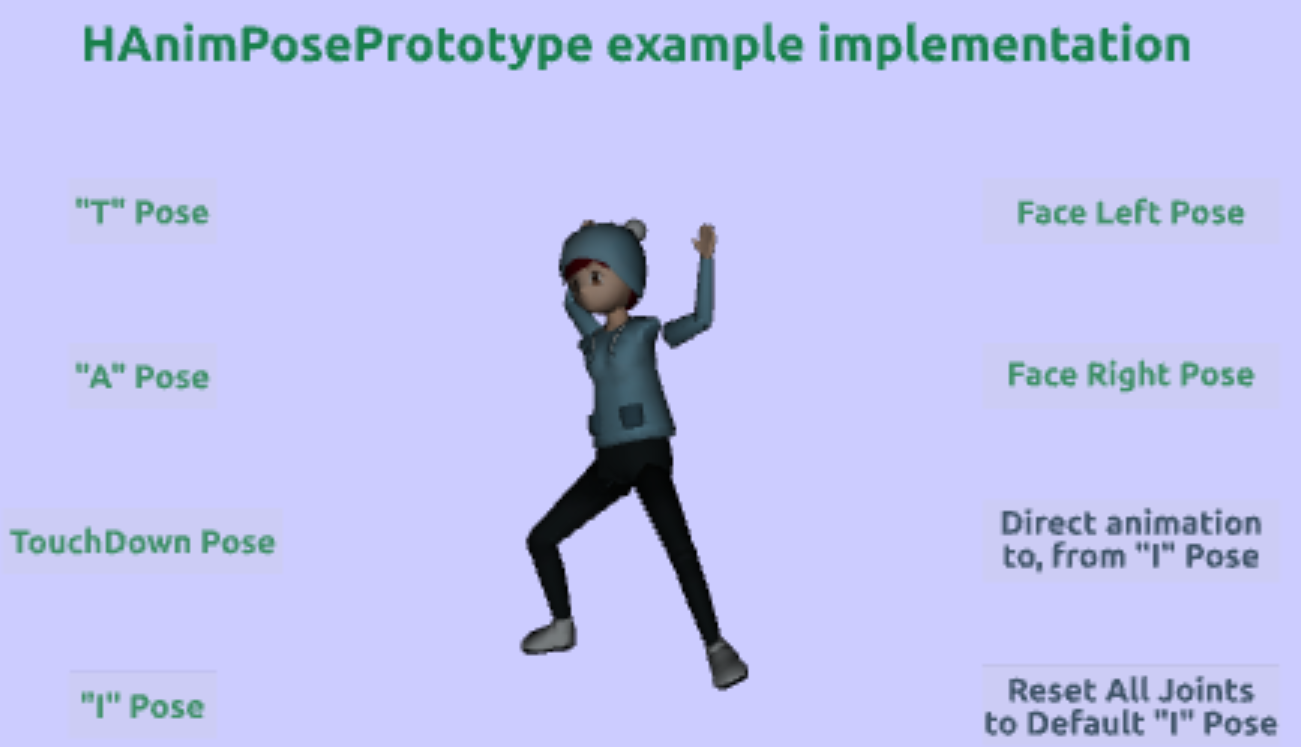
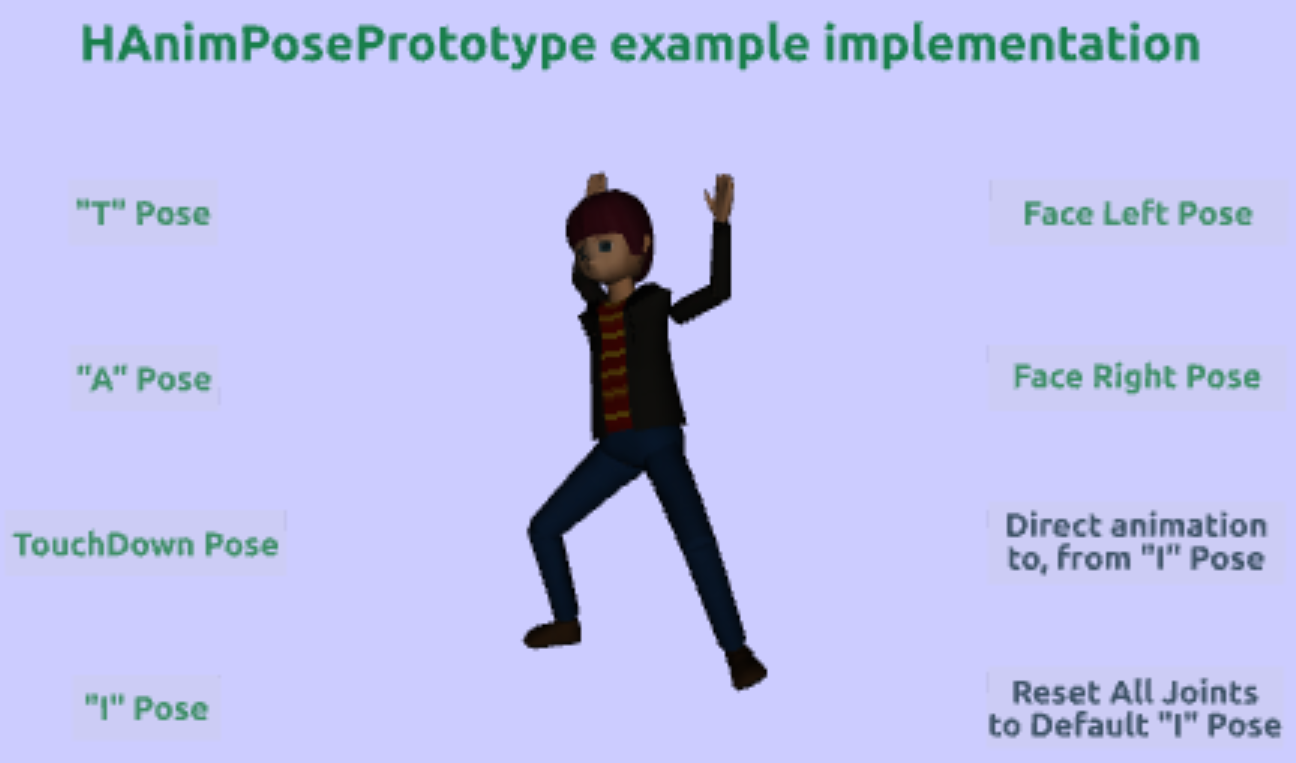
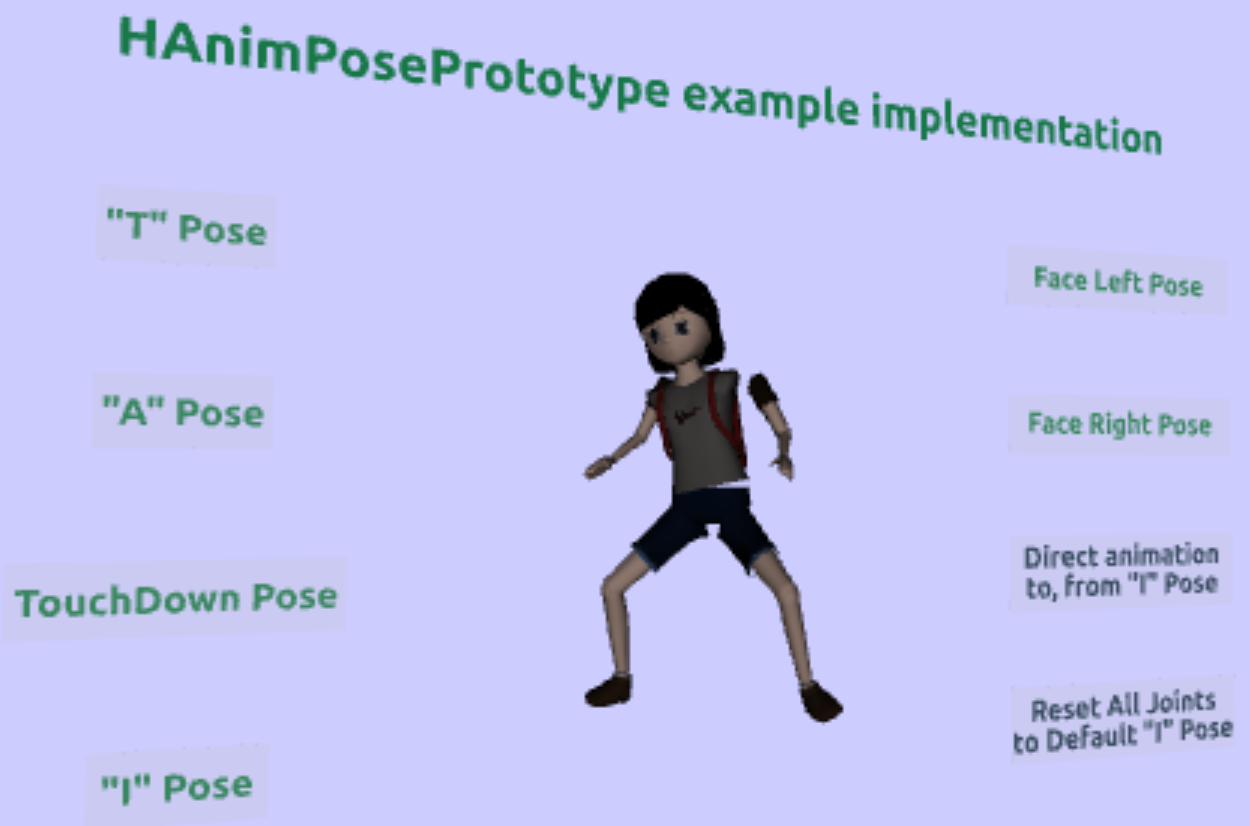
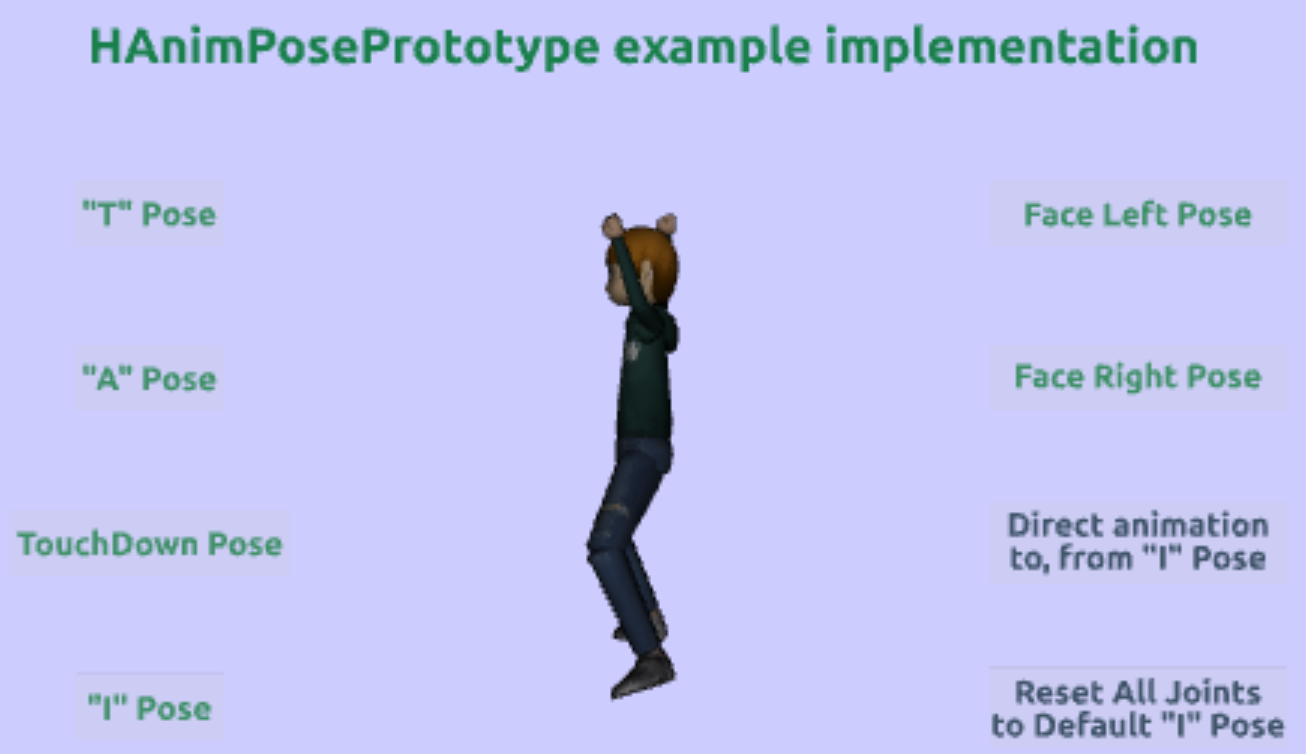
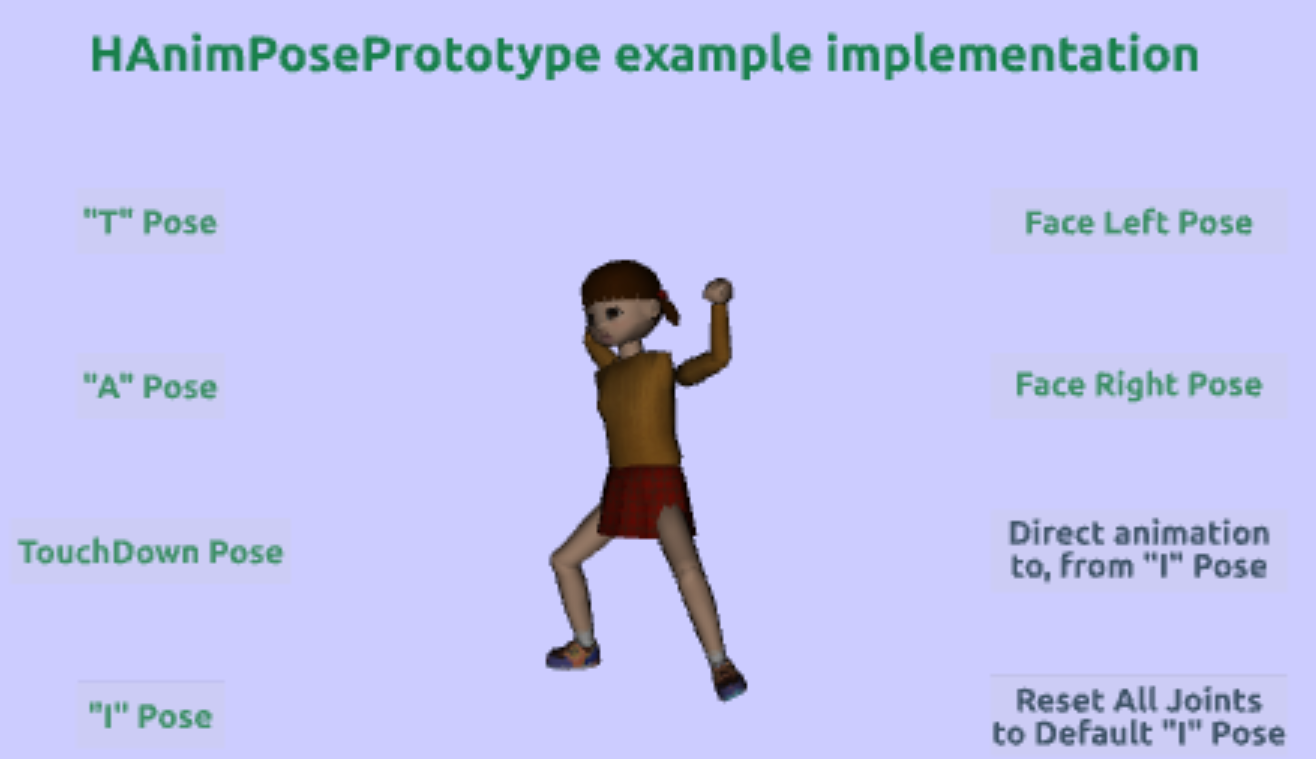
Define an experimental new node to simply capture a single pose for an HAnimHumanoid model. Expected usage is to allow HAnimHumanoid to contain multiple Pose nodes which can be activated and composed.
Scene Meta Information
| meta tags |
HumanoidAnimation.Poses.HAnimPosePrototype Document Metadata |
| title |
HAnimPosePrototype.x3d |
| description |
Define an experimental new node to simply capture a single pose for an HAnimHumanoid model. Expected usage is to allow HAnimHumanoid to contain multiple Pose nodes which can be activated and composed. |
| info |
This model also takes advantage of Inline/IMPORT capabilities (equivalent to USE node) and thus avoids fully copying a large, complex HAnimHumanoid model. Multiple HAnimHumanoid models have been tested satisfactorily, for HAnim version 1 (X3d 3) AND HAnim version 2 (X3D 4). |
| created |
2 October 2025 |
| modified |
23 November 2025 |
| creator |
Don Brutzman |
| creator |
Joe Williams |
| contributor |
Holger Seelig for X_ITE, Sunrize on Windows, scripting guidance, and Inline IMPORT functionality as node-reference equivalent to USE |
| reference |
HAnimPosePrototype.console.txt |
| MovingImage |
demonstration video https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Poses/HAnimPosePrototypeDemoVideo.mp4 |
| Image |
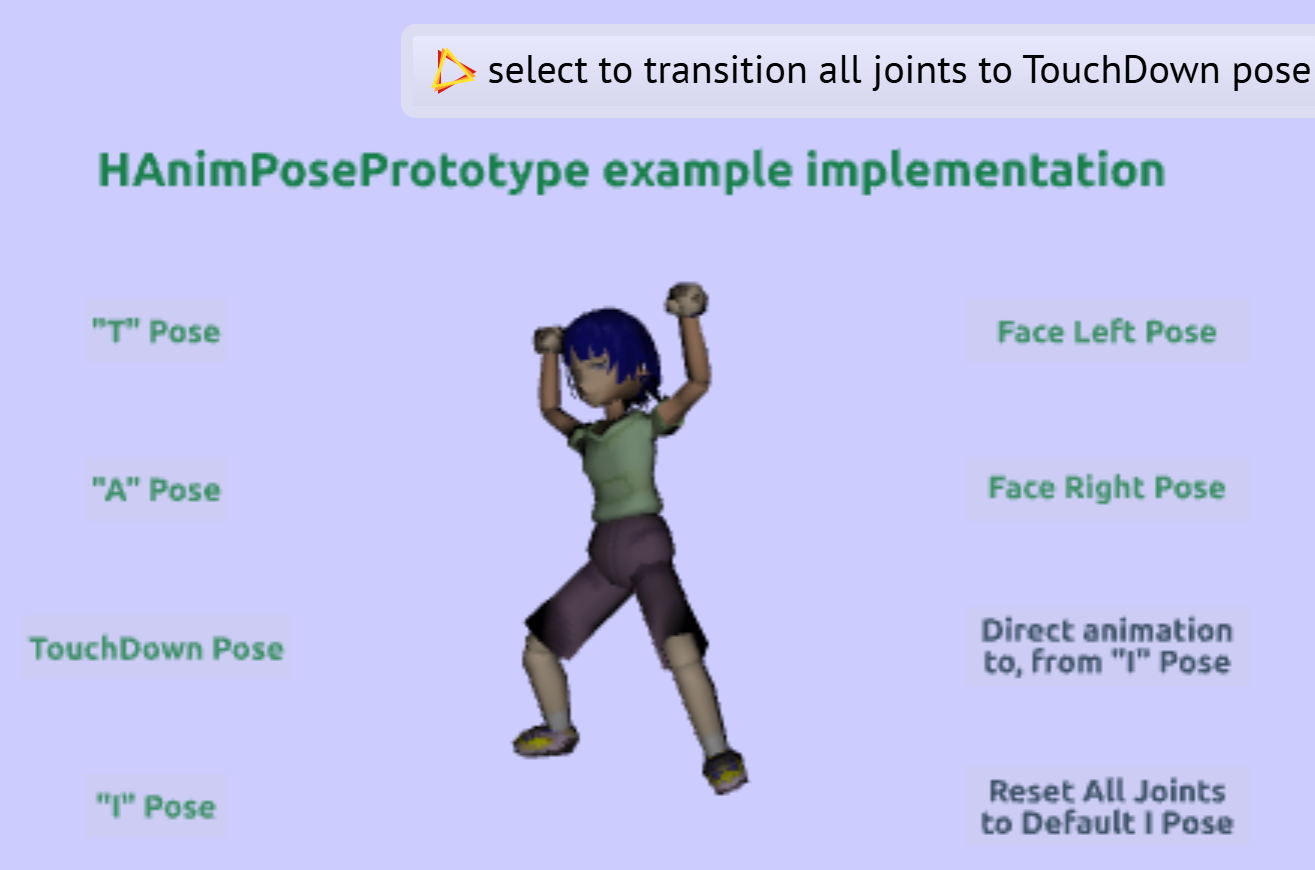
HAnimPoseExampleTouchDown.png |
| Image |
HAnimPoseExampleTouchDownFaceLeftAPose.png |
| Image |
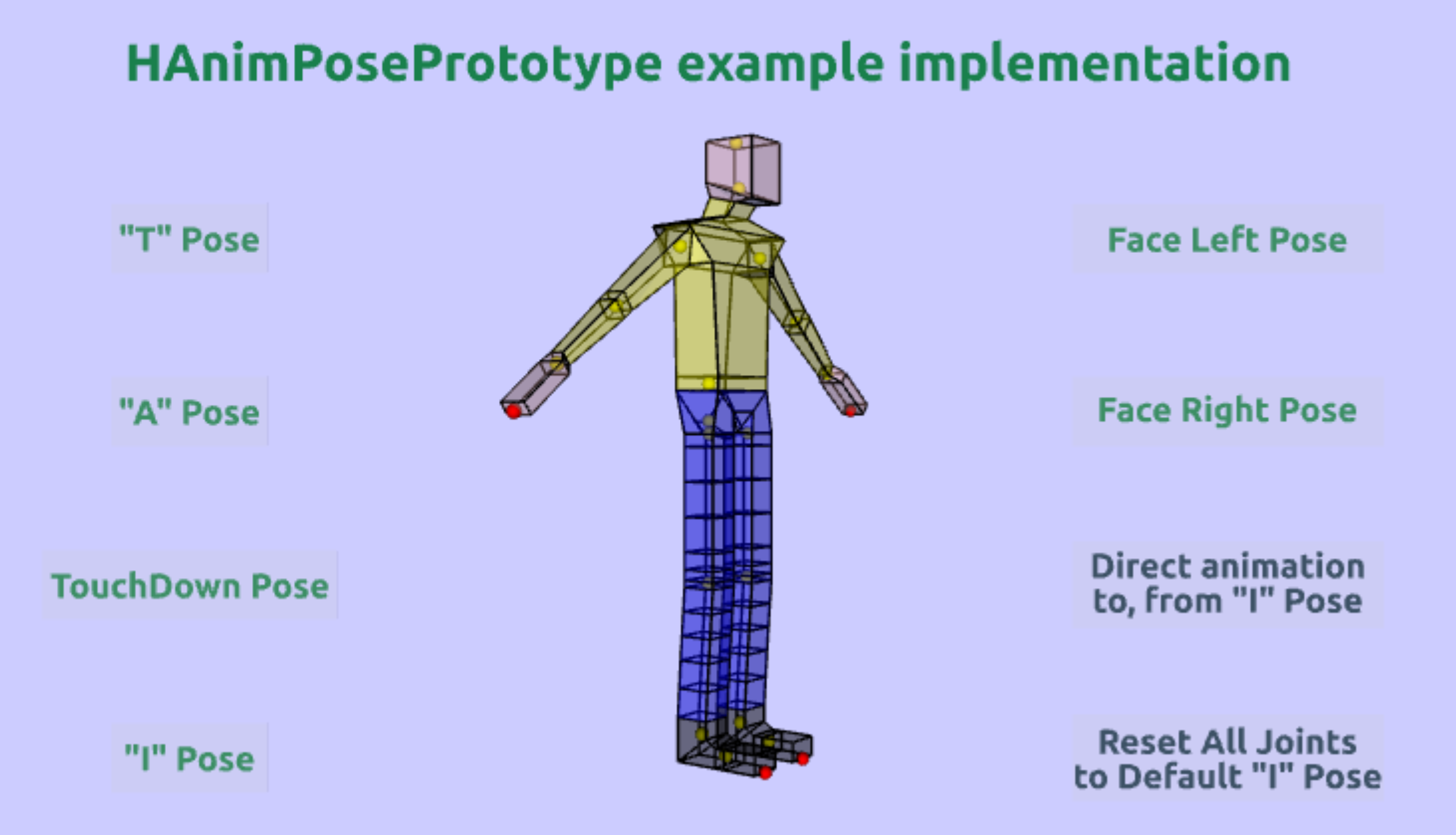
images/HAnimPoseExampleBoxMan1.png |
| Image |
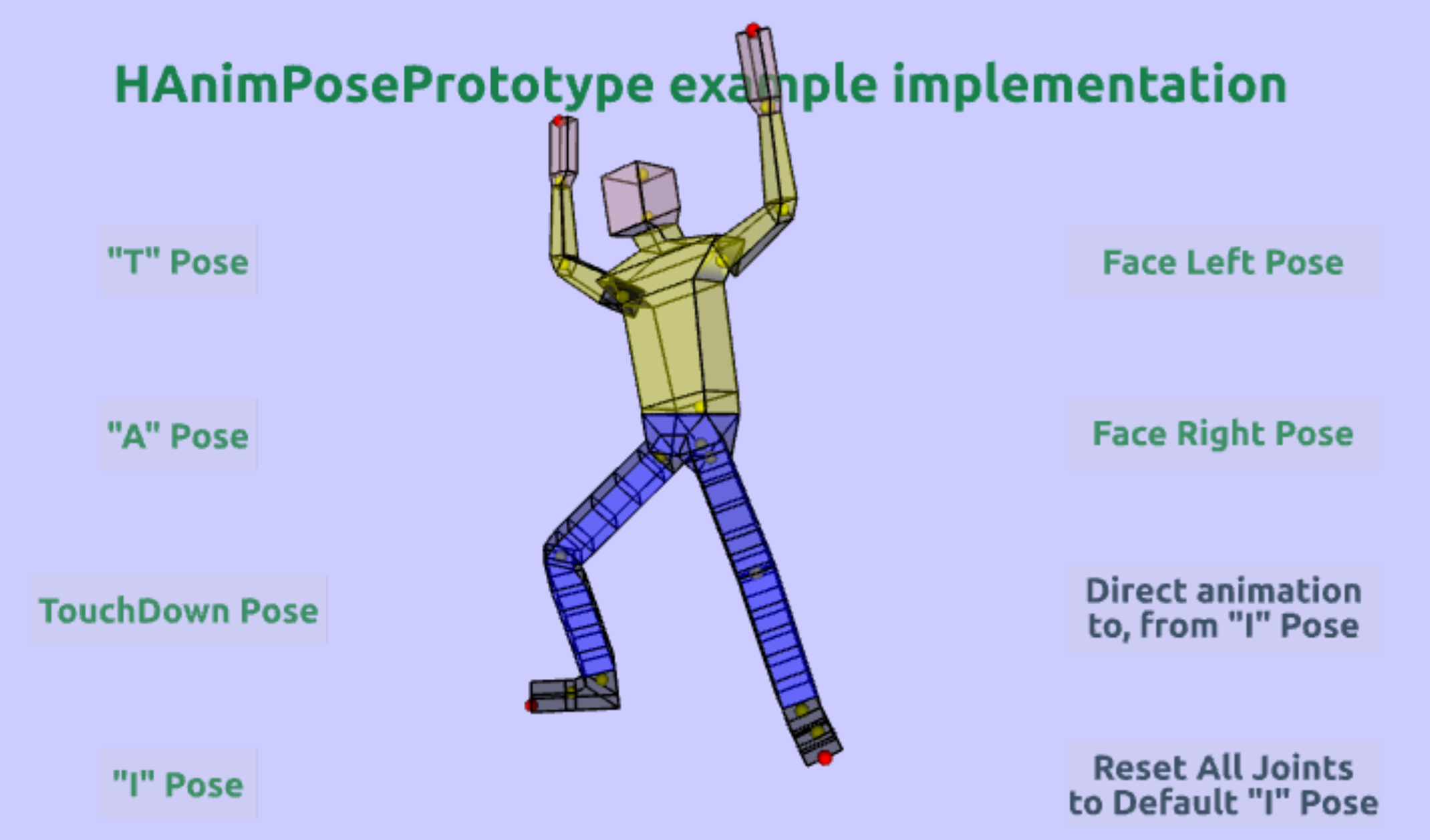
images/HAnimPoseExampleBoxMan2.png |
| Image |
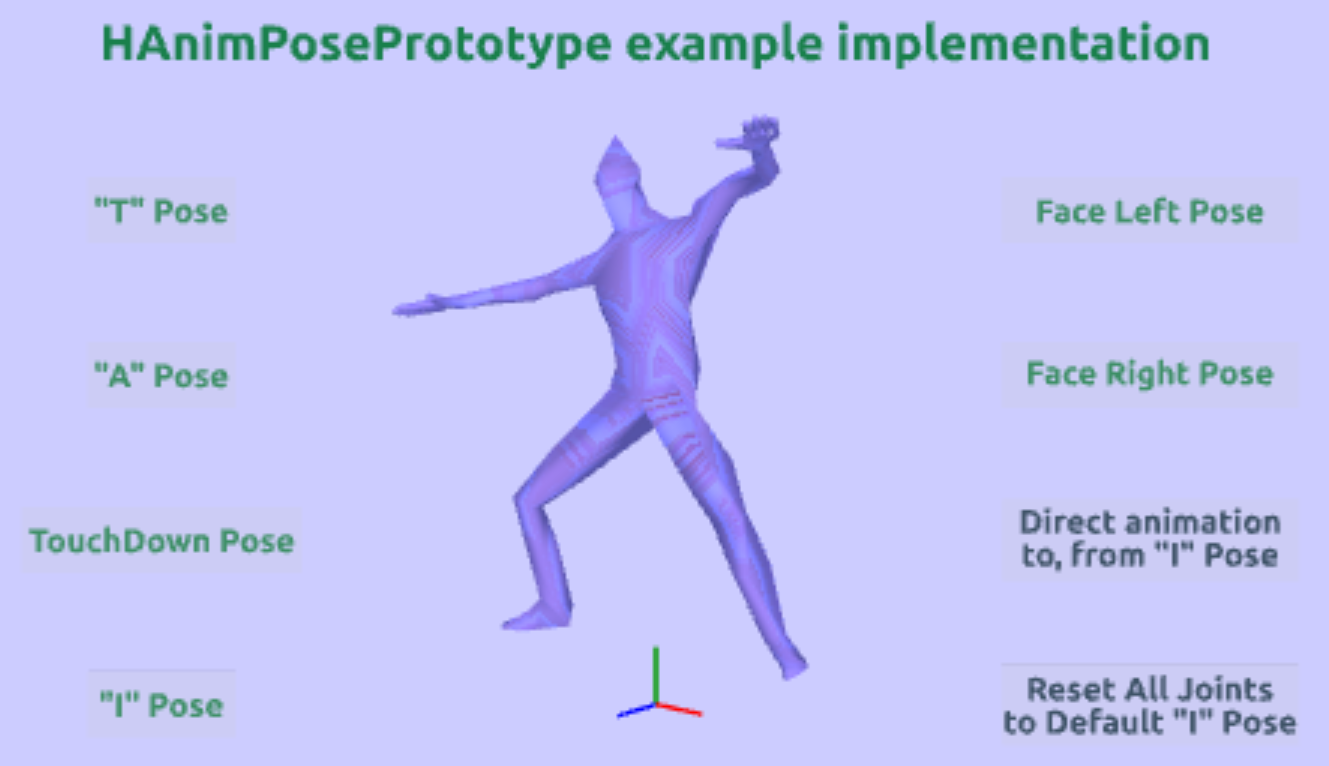
images/HAnimPoseExampleJoeKick.png |
| Image |
images/HAnimPoseExampleJoeSkeletonSkinSite.png |
| Image |
images/HAnimPoseExampleKoreanCharacter01Jin.png |
| Image |
images/HAnimPoseExampleKoreanCharacter02Chul.png |
| Image |
images/HAnimPoseExampleKoreanCharacter03Hyun.png |
| Image |
images/HAnimPoseExampleKoreanCharacter04Young.png |
| Image |
images/HAnimPoseExampleKoreanCharacter05Ju.png |
| Image |
images/HAnimPoseExampleKoreanCharacter06Ga.png |
| Image |
images/HAnimPoseExampleKoreanCharacter07No.png |
| Image |
images/HAnimPoseExampleKoreanCharacter08Da.png |
| Image |
images/HAnimPoseExampleKoreanCharacter09Ru.png |
| Image |
images/HAnimPoseExampleKoreanCharacter10Mi.png |
| Image |
images/HAnimPoseExampleKoreanCharacter11Min.png |
| Image |
images/HAnimPoseExampleKoreanCharacter12Sun.png |
| specificationSection |
HAnim Architecture volume 1 version 2.1 draft, clause 6 Object interfaces, section 6.4 Pose |
| specificationUrl |
https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/ObjectInterfaces.html#Pose |
| specificationSection |
HAnim Architecture volume 1 version 2.1 draft, clause 4 Concepts, section 4.8.2 Modelling of human-like HAnim figures |
| specificationUrl |
https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/concepts.html#ModellingHumanLikeHAnimFigures |
| specificationSection |
HAnim Architecture volume 1 version 2.1 draft, clause 4 Concepts, section 4.8.3 Poses |
| specificationUrl |
https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/concepts.html#Poses |
| reference |
Direct scene manipulations with Javascript, https://doc.instantreality.org/tutorial/direct-scene-manipulations-with-javascript |
| reference |
earlier version of this prototype: originals/HAnimPosePreliminary.x3d |
| generator |
X3D-Edit 4.0, https://www.web3d.org/x3d/tools/X3D-Edit |
| generator |
Sunrize X3D Editor V1.11.1, https://create3000.github.io/sunrize |
| identifier |
https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Poses/HAnimPosePrototype.x3d |
| license |
https://www.web3d.org/x3d/content/examples/license.html |
| |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}