
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 3.3//EN" "https://www.web3d.org/specifications/x3d-3.3.dtd">
|
| 3 | <X3D profile='Immersive' version='3.3' xmlns:xsd='https://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-3.3.xsd'> |
| 4 | <head> |
| 5 | <component level='1' name='H-Anim'/> |
| 6 | <meta name='title' content=' DiamondManLOA_1.x3d '/> |
| 7 | <meta name='description' content='HAnim skeletal structure for Level of Action (LOA) one, with diamonds at the Joint centers. LOA-1 is typical low-end real-time 3D hierarchy.'/> |
| 8 | <meta name='creator' content='Matthew T. Beitler'/> |
| 9 | <meta name='translator' content='Joel S. Pawloski'/> |
| 10 | <meta name='created' content='12 November 2001'/> |
| 11 | <meta name='modified' content='2 July 2023'/> |
| 12 | <meta name='reference' content='../Templates/DiamondManLOA_1.x3d'/> |
| 13 | <meta name=' error ' content=' Legacy model, not valid as X3D4 HAnim version 2.0 since HAnim version 1.0 has significant differences and is no longer directly supported '/> |
| 14 |
<meta name='Image' content='images/BonesAllSkeletonFrontViewLOA1.png'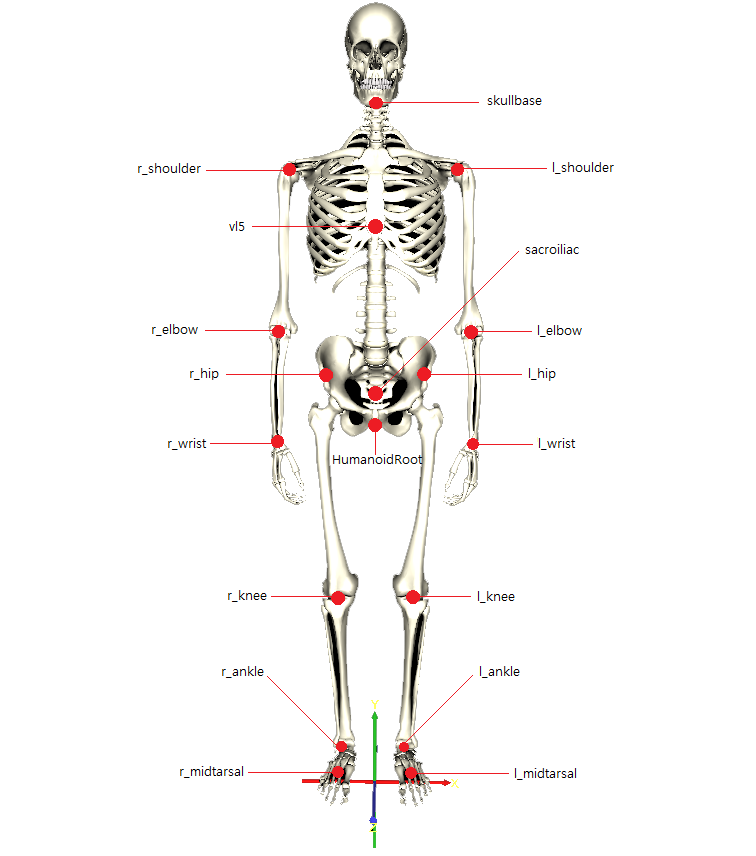 /> />
|
| 15 | <meta name='motto' content='(a) "Diamonds are a girl's best friend." (b) "Gosh, it sure is chilly in here."'/> |
| 16 | <meta name=' warning ' content=' Still needs comments on CAESAR feature points inserted '/> |
| 17 | <meta name='reference' content='HAnim 1.1 specification, Appendix A: Suggested Body Dimensions and Levels of Articulation, Level of Articulation Two'/> |
| 18 | <meta name='reference' content='http://HAnim.org/Specifications/HAnim1.1/appendices.html#appendixa'/> |
| 19 | <meta name='reference' content='http://HAnim.org/Specifications/HAnim1.1/JointCenters1_1_LOA1.wrl'/> |
| 20 | <meta name='reference' content='http://HAnim.org/Specifications/HAnim1.1/JointCenters1_1_LOA1-diamond.wrl'/> |
| 21 | <meta name='reference' content='http://ece.uwaterloo.ca/~HAnim'/> |
| 22 | <meta name='reference' content=' http://www.cis.upenn.edu/~badler/anthro/89-71.pdf '/> |
| 23 | <meta name='reference' content='http://www.cis.upenn.edu/~badler/anthro/89-71.ps'/> |
| 24 | <meta name='reference' content='http://www.cis.upenn.edu/~beitler'/> |
| 25 |
<meta name='Image' content='humanoid_landmark_locations.gif' /> />
|
| 26 |
<meta name='Image' content='http://HAnim.org/Specifications/HAnim1.1/humanoid_landmark_locations.gif '/>
'/>
|
| 27 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Templates/DiamondManLOA_1.x3d '/> |
| 28 | <meta name='generator' content='X3D-Edit 4.0, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 29 | <meta name='license' content='../license.html'/> |
| 30 | </head> |
HAnimHumanoid model visualization report: humanoid HAnimHumanoid Report
-->
<!--
![]() DEF nodes index:
DiamondShape,
hanim_c4,
hanim_DiamondManLOA_1_view,
hanim_humanoid,
hanim_HumanoidRoot,
hanim_l_ankle,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_tip,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middistal_tip,
hanim_l_midtarsal,
hanim_l_olecranon_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_shoulder,
hanim_l_sphyrion_pt,
hanim_l_thigh,
hanim_l_tragion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_nuchale_pt,
hanim_pelvis,
hanim_r_ankle,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_tip,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middistal_tip,
hanim_r_midtarsal,
hanim_r_olecranon_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_thigh,
hanim_r_tragion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_sacroiliac,
hanim_sellion_pt,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_supramenton_pt,
hanim_vc4,
hanim_vl1,
hanim_vl5,
l_forearm_adjust,
l_hand_adjust,
l_upperarm_adjust,
points,
r_forearm_adjust,
r_hand_adjust,
r_upperarm_adjust
DEF nodes index:
DiamondShape,
hanim_c4,
hanim_DiamondManLOA_1_view,
hanim_humanoid,
hanim_HumanoidRoot,
hanim_l_ankle,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_tip,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middistal_tip,
hanim_l_midtarsal,
hanim_l_olecranon_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_shoulder,
hanim_l_sphyrion_pt,
hanim_l_thigh,
hanim_l_tragion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_nuchale_pt,
hanim_pelvis,
hanim_r_ankle,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_tip,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middistal_tip,
hanim_r_midtarsal,
hanim_r_olecranon_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_thigh,
hanim_r_tragion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_sacroiliac,
hanim_sellion_pt,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_supramenton_pt,
hanim_vc4,
hanim_vl1,
hanim_vl5,
l_forearm_adjust,
l_hand_adjust,
l_upperarm_adjust,
points,
r_forearm_adjust,
r_hand_adjust,
r_upperarm_adjust
Index for Viewpoint nodes: Viewpoint_1, FrontView, InclinedView, SideView, TopView
-->| 31 | <Scene> |
| 32 | <WorldInfo info=' "HAnim 2.0 Default Joint Centers, Level Of Articulation (LOA) 1 -------------------------------------------------------- HANIM 1.1 (VRML 2.0) Author name: eMpTy (a.k.a. Matthew T. Beitler) HANIM 1.1 (VRML 2.0) Author email: beitler@graphics.cis.upenn.edu or beitler@acm.org HANIM 1.1 (VRML 2.0) Author homepage: http://www.cis.upenn.edu/~beitler HANIM 1.1 (VRML 2.0) Compliance Date: May 12, 1999 HANIM 1.1 Compliance Information: http://ece.uwaterloo.ca/~HAnim/ Construction Info (joint centers): The joint centers of this figure are based on the work of Norman Badler, director of the Center for Human Modeling and Simulation at the University of Pennsylvania. The original document which these joint centers are based on can be found at: http://www.cis.upenn.edu/~badler/anthro/89-71.ps, ".pdf"' title='HANIM 1.1 Default Joint Centers, LOA1'/> |
| 33 | <NavigationInfo speed='1.5'/> |
| 34 | <Viewpoint centerOfRotation='0 1 0' description='Diamond Man, LOA 1' position='0 1 3'/> |
| 35 | <HAnimHumanoid DEF='hanim_humanoid' name='humanoid'> |
| 36 | <!-- original HAnimHumanoid info='"authorEmail=beitler@graphics.cis.upenn.edu beitler@acm.org" "authorName=Matthew T. Beitler" "copyright=Copyright 1999 Matthew T. Beitler" "humanoidVersion=JointCenters 1.1 LOA1" "usageRestrictions=PERMISSION TO FULLY USE THIS SCENE GRAPH IS GRANTED PROVIDED THIS COPYRIGHT INFORMATION AND DOCUMENTATION OF THE ORIGINAL AUTHOR IS INCLUDED. This humanoid scene graph is provided _as-is_ and without warranty of any kind express implied or otherwise including without limitation any warranty of merchantability or fitness for a particular purpose."' --> |
| 37 | <MetadataSet name='HAnimHumanoid.info' reference='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/ObjectInterfaces.html#Humanoid'> |
| 38 | <MetadataString containerField='value' name='authorEmail' value='beitler@graphics.cis.upenn.edu beitler@acm.org'/> |
| 39 | <MetadataString containerField='value' name='authorName' value='Matthew T. Beitler'/> |
| 40 | <MetadataString containerField='value' name='copyright' value='Copyright 1999 Matthew T. Beitler'/> |
| 41 | <MetadataString containerField='value' name='humanoidVersion' value='JointCenters 1.1 LOA1'/> |
| 42 | <MetadataString containerField='value' name='usageRestrictions' value='PERMISSION TO FULLY USE THIS SCENE GRAPH IS GRANTED PROVIDED THIS COPYRIGHT INFORMATION AND DOCUMENTATION OF THE ORIGINAL AUTHOR IS INCLUDED. This humanoid scene graph is provided _as-is_ and without warranty of any kind express implied or otherwise including without limitation any warranty of merchantability or fitness for a particular purpose.'/> |
| 43 | </MetadataSet> |
| 44 |
<!-- HAnimJoint
hanim_HumanoidRoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_HumanoidRoot' center='0.0 0.8240 0.0277' containerField='skeleton' name='humanoid_root'> |
| 45 |
<!-- HAnimJoint
hanim_sacroiliac is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_sacroiliac' center='0.0 0.9149 0.0016' name='sacroiliac'> |
| 46 |
<!-- HAnimSegment
hanim_pelvis is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_pelvis' name='pelvis'> |
| 47 | <Transform translation='0.0 0.9149 0.0016'> |
| 48 | |
| 49 | <IndexedFaceSet creaseAngle='0.5' coordIndex='0 1 2 -1 0 2 3 -1 0 3 4 -1 0 4 1 -1 5 2 1 -1 5 3 2 -1 5 4 3 -1 5 1 4 -1'> |
| 50 | <Coordinate DEF='points' point='0 0.01 0 -0.01 0 0 0 0 0.01 0.01 0 0 0 0 -0.01 0 -0.01 0'/> |
| 51 | </IndexedFaceSet> |
| 52 | <Appearance> |
| 53 | <Material diffuseColor='1 1 0'/> |
| 54 | </Appearance> |
| 55 | </Shape> |
| 56 | </Transform> |
| 57 | </HAnimSegment> |
| 58 |
<!-- HAnimJoint
hanim_l_hip is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_hip' center='0.0961 0.9124 -0.0001' name='l_hip'> |
| 59 |
<!-- HAnimSegment
hanim_l_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_thigh' name='l_thigh'> |
| 60 | <Transform translation='0.0961 0.9124 -0.0001'> |
| 61 | <Shape USE='DiamondShape'/> |
| 62 | </Transform> |
| 63 |
<!-- HAnimSite
hanim_l_knee_crease_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_knee_crease_pt' name='l_knee_crease_pt' translation='0.0993 0.4881 -0.0309'/> |
| 64 |
<!-- HAnimSite
hanim_l_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_femoral_lateral_epicn_pt' name='l_femoral_lateral_epicn_pt' translation='0.1598 0.4967 0.0297'/> |
| 65 |
<!-- HAnimSite
hanim_l_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_femoral_medial_epicn_pt' name='l_femoral_medial_epicn_pt' translation='0.0398 0.4946 0.0303'/> |
| 66 | </HAnimSegment> |
| 67 |
<!-- HAnimJoint
hanim_l_knee is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_knee' center='0.1040 0.4867 0.0308' name='l_knee'> |
| 68 |
<!-- HAnimSegment
hanim_l_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_calf' name='l_calf'> |
| 69 | <Transform translation='0.1040 0.4867 0.0308'> |
| 70 | <Shape USE='DiamondShape'/> |
| 71 | </Transform> |
| 72 | </HAnimSegment> |
| 73 |
<!-- HAnimJoint
hanim_l_ankle is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_ankle' center='0.1101 0.0656 -0.0736' name='l_ankle'> |
| 74 |
<!-- HAnimSegment
hanim_l_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hindfoot' name='l_hindfoot'> |
| 75 | <Transform translation='0.1101 0.0656 -0.0736'> |
| 76 | <Shape USE='DiamondShape'/> |
| 77 | </Transform> |
| 78 |
<!-- HAnimSite
hanim_l_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_lateral_malleolus_pt' name='l_lateral_malleolus_pt' translation='0.1308 0.0597 -0.1032'/> |
| 79 |
<!-- HAnimSite
hanim_l_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_medial_malleolus_pt' name='l_medial_malleolus_pt' translation='0.0890 0.0716 -0.0881'/> |
| 80 |
<!-- HAnimSite
hanim_l_sphyrion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_sphyrion_pt' name='l_sphyrion_pt' translation='0.0890 0.0575 -0.0943'/> |
| 81 |
<!-- HAnimSite
hanim_l_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_calcaneous_post_pt' name='l_calcaneous_post_pt' translation='0.0974 0.0259 -0.1171'/> |
| 82 | </HAnimSegment> |
| 83 |
<!-- HAnimJoint
hanim_l_midtarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_midtarsal' center='0.1086 0.0001 0.0368' name='l_midtarsal'> |
| 84 |
<!-- HAnimSegment
hanim_l_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_middistal' name='l_middistal'> |
| 85 |
<!-- HAnimSite
hanim_l_middistal_tip is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_middistal_tip' name='l_middistal_tip' translation='0.1354 0.0016 0.1476'/> |
| 86 |
<!-- HAnimSite
hanim_l_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_metatarsal_pha5_pt' name='l_metatarsal_pha5_pt' translation='0.1825 0.0070 0.0928'/> |
| 87 |
<!-- HAnimSite
hanim_l_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_metatarsal_pha1_pt' name='l_metatarsal_pha1_pt' translation='0.0816 0.0232 0.0106'/> |
| 88 |
<!-- HAnimSite
hanim_l_digit2_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_digit2_pt' name='l_digit2_pt' translation='0.1195 0.0079 0.1433'/> |
| 89 | </HAnimSegment> |
| 90 | </HAnimJoint> |
| 91 | </HAnimJoint> |
| 92 | </HAnimJoint> |
| 93 | </HAnimJoint> |
| 94 |
<!-- HAnimJoint
hanim_r_hip is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_hip' center='-0.0950 0.9171 0.0029' name='r_hip'> |
| 95 |
<!-- HAnimSegment
hanim_r_thigh is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_thigh' name='r_thigh'> |
| 96 | <Transform translation='-0.0950 0.9171 0.0029'> |
| 97 | <Shape USE='DiamondShape'/> |
| 98 | </Transform> |
| 99 |
<!-- HAnimSite
hanim_r_knee_crease_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_knee_crease_pt' name='r_knee_crease_pt' translation='-0.0825 0.4932 -0.0326'/> |
| 100 |
<!-- HAnimSite
hanim_r_femoral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_femoral_lateral_epicn_pt' name='r_femoral_lateral_epicn_pt' translation='-0.1421 0.4992 0.0310'/> |
| 101 |
<!-- HAnimSite
hanim_r_femoral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_femoral_medial_epicn_pt' name='r_femoral_medial_epicn_pt' translation='-0.0221 0.5014 0.0289'/> |
| 102 | </HAnimSegment> |
| 103 |
<!-- HAnimJoint
hanim_r_knee is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_knee' center='-0.0867 0.4913 0.0318' name='r_knee'> |
| 104 |
<!-- HAnimSegment
hanim_r_calf is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_calf' name='r_calf'> |
| 105 | <Transform translation='-0.0867 0.4913 0.0318'> |
| 106 | <Shape USE='DiamondShape'/> |
| 107 | </Transform> |
| 108 | </HAnimSegment> |
| 109 |
<!-- HAnimJoint
hanim_r_ankle is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_ankle' center='-0.0801 0.0712 -0.0766' name='r_ankle'> |
| 110 |
<!-- HAnimSegment
hanim_r_hindfoot is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hindfoot' name='r_hindfoot'> |
| 111 | <Transform translation='-0.0801 0.0712 -0.0766'> |
| 112 | <Shape USE='DiamondShape'/> |
| 113 | </Transform> |
| 114 |
<!-- HAnimSite
hanim_r_lateral_malleolus_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_lateral_malleolus_pt' name='r_lateral_malleolus_pt' translation='-0.1006 0.0658 -0.1075'/> |
| 115 |
<!-- HAnimSite
hanim_r_medial_malleolus_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_medial_malleolus_pt' name='r_medial_malleolus_pt' translation='-0.0591 0.0760 -0.0928'/> |
| 116 |
<!-- HAnimSite
hanim_r_sphyrion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_sphyrion_pt' name='r_sphyrion_pt' translation='-0.0603 0.0610 -0.1002'/> |
| 117 |
<!-- HAnimSite
hanim_r_calcaneous_post_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_calcaneous_post_pt' name='r_calcaneous_post_pt' translation='-0.0692 0.0297 -0.1221'/> |
| 118 | </HAnimSegment> |
| 119 |
<!-- HAnimJoint
hanim_r_midtarsal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midtarsal' center='-0.0801 0.0 0.0368' name='r_midtarsal'> |
| 120 |
<!-- HAnimSegment
hanim_r_middistal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_middistal' name='r_middistal'> |
| 121 |
<!-- HAnimSite
hanim_r_middistal_tip is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_middistal_tip' name='r_middistal_tip' translation='-0.1043 -0.0227 0.1450'/> |
| 122 |
<!-- HAnimSite
hanim_r_metatarsal_pha5_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_metatarsal_pha5_pt' name='r_metatarsal_pha5_pt' translation='-0.1523 0.0166 0.0895'/> |
| 123 |
<!-- HAnimSite
hanim_r_metatarsal_pha1_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_metatarsal_pha1_pt' name='r_metatarsal_pha1_pt' translation='-0.0521 0.0260 0.0127'/> |
| 124 |
<!-- HAnimSite
hanim_r_digit2_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_digit2_pt' name='r_digit2_pt' translation='-0.0883 0.0134 0.1383'/> |
| 125 | </HAnimSegment> |
| 126 | </HAnimJoint> |
| 127 | </HAnimJoint> |
| 128 | </HAnimJoint> |
| 129 | </HAnimJoint> |
| 130 | </HAnimJoint> |
| 131 | |
| 132 | |
| 133 |
<!-- HAnimJoint
hanim_l_shoulder is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_shoulder' center='0.2029 1.4376 -0.0387' name='l_shoulder'> |
| 134 |
<!-- HAnimSegment
hanim_l_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_upperarm' name='l_upperarm'> |
| 135 | <Transform translation='0.2029 1.4376 -0.0387'> |
| 136 | <Shape USE='DiamondShape'/> |
| 137 | </Transform> |
| 138 | <Transform DEF='l_upperarm_adjust' center='0.182 1.22 -0.047' rotation='1 0 0 0.119' translation='0.2029 1.4376 -0.0387'/> |
| 139 |
<!-- HAnimSite
hanim_l_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_humeral_lateral_epicn_pt' name='l_humeral_lateral_epicn_pt' translation='0.2280 1.1482 -0.1100'/> |
| 140 | </HAnimSegment> |
| 141 |
<!-- HAnimJoint
hanim_l_elbow is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_elbow' center='0.2014 1.1357 -0.0682' name='l_elbow'> |
| 142 |
<!-- HAnimSegment
hanim_l_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_forearm' name='l_forearm'> |
| 143 | <Transform translation='0.2014 1.1357 -0.0682'> |
| 144 | <Shape USE='DiamondShape'/> |
| 145 | </Transform> |
| 146 | <Transform DEF='l_forearm_adjust' center='0.198 0.961 -0.0405' rotation='-1 0 0 0.1' translation='0.2014 1.1357 -0.0682'/> |
| 147 |
<!-- HAnimSite
hanim_l_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_radial_styloid_pt' name='l_radial_styloid_pt' translation='0.1901 0.8645 -0.0415'/> |
| 148 |
<!-- HAnimSite
hanim_l_olecranon_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_olecranon_pt' name='l_olecranon_pt' translation='-0.1962 1.1375 -0.1123'/> |
| 149 |
<!-- HAnimSite
hanim_l_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_humeral_medial_epicn_pt' name='l_humeral_medial_epicn_pt' translation='0.1735 1.1272 -0.1113'/> |
| 150 |
<!-- HAnimSite
hanim_l_radiale_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_radiale_pt' name='l_radiale_pt' translation='0.2182 1.1212 -0.1167'/> |
| 151 | </HAnimSegment> |
| 152 |
<!-- HAnimJoint
hanim_l_wrist is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_l_wrist' center='0.1984 0.8663 -0.0583' name='l_wrist'> |
| 153 |
<!-- HAnimSegment
hanim_l_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_l_hand' name='l_hand'> |
| 154 | <Transform translation='0.1984 0.8663 -0.0583'> |
| 155 | <Shape USE='DiamondShape'/> |
| 156 | </Transform> |
| 157 | <Transform DEF='l_hand_adjust' center='0.213 0.811 -0.0338' rotation='-0.06361 -0.9967 0.04988 1.333' translation='0.1984 0.8663 -0.0583'/> |
| 158 |
<!-- HAnimSite
hanim_l_hand_tip is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_hand_tip' name='l_hand_tip' translation='0.2080 0.6731 -0.0491'/> |
| 159 |
<!-- HAnimSite
hanim_l_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_metacarpal_pha2_pt' name='l_metacarpal_pha2_pt' translation='0.2009 0.8139 -0.0237'/> |
| 160 |
<!-- HAnimSite
hanim_l_dactylion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_dactylion_pt' name='l_dactylion_pt' translation='0.2056 0.6743 -0.0482'/> |
| 161 |
<!-- HAnimSite
hanim_l_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_ulnar_styloid_pt' name='l_ulnar_styloid_pt' translation='-0.2142 0.8529 -0.0648'/> |
| 162 |
<!-- HAnimSite
hanim_l_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_metacarpal_pha5_pt' name='l_metacarpal_pha5_pt' translation='0.1929 0.7860 -0.1122'/> |
| 163 | </HAnimSegment> |
| 164 | </HAnimJoint> |
| 165 | </HAnimJoint> |
| 166 | </HAnimJoint> |
| 167 |
<!-- HAnimJoint
hanim_r_shoulder is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_shoulder' center='-0.1907 1.4407 -0.0325' name='r_shoulder'> |
| 168 |
<!-- HAnimSegment
hanim_r_upperarm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_upperarm' name='r_upperarm'> |
| 169 | <Transform translation='-0.1907 1.4407 -0.0325'> |
| 170 | <Shape USE='DiamondShape'/> |
| 171 | </Transform> |
| 172 | <Transform DEF='r_upperarm_adjust' center='-0.182 1.22 -0.047' rotation='1 0 0 0.0836' translation='-0.1907 1.4407 -0.0325'/> |
| 173 |
<!-- HAnimSite
hanim_r_humeral_lateral_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_humeral_lateral_epicn_pt' name='r_humeral_lateral_epicn_pt' translation='-0.2224 1.1517 -0.1033'/> |
| 174 | </HAnimSegment> |
| 175 |
<!-- HAnimJoint
hanim_r_elbow is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_elbow' center='-0.1949 1.1388 -0.0620' name='r_elbow'> |
| 176 |
<!-- HAnimSegment
hanim_r_forearm is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_forearm' name='r_forearm'> |
| 177 | <Transform translation='-0.1949 1.1388 -0.0620'> |
| 178 | <Shape USE='DiamondShape'/> |
| 179 | </Transform> |
| 180 | <Transform DEF='r_forearm_adjust' center='-0.198 0.961 -0.0397' rotation='-1 0 0 0.1254' translation='-0.1949 1.1388 -0.0620'/> |
| 181 |
<!-- HAnimSite
hanim_r_radial_styloid_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_radial_styloid_pt' name='r_radial_styloid_pt' translation='-0.1884 0.8676 -0.0360'/> |
| 182 |
<!-- HAnimSite
hanim_r_olecranon_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_olecranon_pt' name='r_olecranon_pt' translation='-0.1907 1.1405 -0.1065'/> |
| 183 |
<!-- HAnimSite
hanim_r_humeral_medial_epicn_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_humeral_medial_epicn_pt' name='r_humeral_medial_epicn_pt' translation='-0.1680 1.1298 -0.1062'/> |
| 184 |
<!-- HAnimSite
hanim_r_radiale_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_radiale_pt' name='r_radiale_pt' translation='-0.2130 1.1305 -0.1091'/> |
| 185 | </HAnimSegment> |
| 186 |
<!-- HAnimJoint
hanim_r_wrist is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_wrist' center='-0.1959 0.8694 -0.0521' name='r_wrist'> |
| 187 |
<!-- HAnimSegment
hanim_r_hand is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hand' name='r_hand'> |
| 188 | <Transform translation='-0.1959 0.8694 -0.0521'> |
| 189 | <Shape USE='DiamondShape'/> |
| 190 | </Transform> |
| 191 | <Transform DEF='r_hand_adjust' center='-0.217 0.811 -0.0338' rotation='-0.09024 0.994 -0.0624 1.216'/> |
| 192 |
<!-- HAnimSite
hanim_r_hand_tip is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_hand_tip' name='r_hand_tip' translation='-0.1969 0.6758 -0.0427'/> |
| 193 |
<!-- HAnimSite
hanim_r_metacarpal_pha2_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_metacarpal_pha2_pt' name='r_metacarpal_pha2_pt' translation='-0.1977 0.8169 -0.0177'/> |
| 194 |
<!-- HAnimSite
hanim_r_dactylion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_dactylion_pt' name='r_dactylion_pt' translation='-0.1941 0.6772 -0.0423'/> |
| 195 |
<!-- HAnimSite
hanim_r_ulnar_styloid_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_ulnar_styloid_pt' name='r_ulnar_styloid_pt' translation='-0.2117 0.8562 -0.0584'/> |
| 196 |
<!-- HAnimSite
hanim_r_metacarpal_pha5_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_metacarpal_pha5_pt' name='r_metacarpal_pha5_pt' translation='-0.1929 0.7890 -0.1064'/> |
| 197 | </HAnimSegment> |
| 198 | </HAnimJoint> |
| 199 | </HAnimJoint> |
| 200 | </HAnimJoint> |
| 201 | |
| 202 | |
| 203 | </HAnimJoint> |
| 204 | </HAnimJoint> |
| 205 | |
| 206 |
<!-- HAnimJoint
hanim_skullbase is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_skullbase' center='0.0044 1.6209 0.0236' name='skullbase'> |
| 207 |
<!-- HAnimSegment
hanim_skull is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_skull' name='skull'> |
| 208 | <Transform translation='0.0044 1.6209 0.0236'> |
| 209 | <Shape USE='DiamondShape'/> |
| 210 | </Transform> |
| 211 |
<!-- HAnimSite
hanim_skull_tip is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_skull_tip' name='skull_tip' translation='0.0050 1.7504 0.0055'/> |
| 212 |
<!-- HAnimSite
hanim_sellion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_sellion_pt' name='sellion_pt' translation='0.0058 1.6316 0.0852'/> |
| 213 |
<!-- HAnimSite
hanim_r_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_infraorbitale_pt' name='r_infraorbitale_pt' translation='-0.0237 1.6171 0.0752'/> |
| 214 |
<!-- HAnimSite
hanim_l_infraorbitale_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_infraorbitale_pt' name='l_infraorbitale_pt' translation='0.0341 1.6171 0.0752'/> |
| 215 |
<!-- HAnimSite
hanim_supramenton_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_supramenton_pt' name='supramenton_pt' translation='0.0061 1.5410 0.0805'/> |
| 216 |
<!-- HAnimSite
hanim_r_tragion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_tragion_pt' name='r_tragion_pt' translation='-0.0646 1.6347 0.0302'/> |
| 217 |
<!-- HAnimSite
hanim_r_gonion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_r_gonion_pt' name='r_gonion_pt' translation='-0.0520 1.5529 0.0347'/> |
| 218 |
<!-- HAnimSite
hanim_l_tragion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_tragion_pt' name='l_tragion_pt' translation='0.0739 1.6348 0.0282'/> |
| 219 |
<!-- HAnimSite
hanim_l_gonion_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_l_gonion_pt' name='l_gonion_pt' translation='0.0631 1.5530 0.0330'/> |
| 220 |
<!-- HAnimSite
hanim_nuchale_pt is a DEF node that has 1 USE node: USE_1 --> <HAnimSite DEF='hanim_nuchale_pt' name='nuchale_pt' translation='0.0039 1.5972 -0.0796'/> |
| 221 | </HAnimSegment> |
| 222 | </HAnimJoint> |
| 223 | </HAnimJoint> |
| 224 | </HAnimJoint> |
| 225 | <HAnimSite DEF='hanim_DiamondManLOA_1_view' containerField='viewpoints' name='DiamondManLOA_1_view'> |
| 226 | <Viewpoint DEF='InclinedView' description='Inclined View' orientation='-0.113 0.993 0.0347 0.671' position='1.62 1.05 2.06'/> |
| 227 | <Viewpoint DEF='FrontView' description='Front View' position='0 0.854 2.57665'/> |
| 228 | <Viewpoint DEF='SideView' description='Side View' orientation='0 1 0 1.57079' position='2.5929 0.854 0'/> |
| 229 | <Viewpoint DEF='TopView' description='Top View' orientation='1 0 0 -1.57079' position='0 3.4495 0'/> |
| 230 | </HAnimSite> |
| 231 | <HAnimJoint USE='hanim_HumanoidRoot' containerField='joints'/> |
| 232 | <HAnimJoint USE='hanim_sacroiliac' containerField='joints'/> |
| 233 | <HAnimJoint USE='hanim_vl1' containerField='joints'/> |
| 234 | <HAnimJoint USE='hanim_vc4' containerField='joints'/> |
| 235 | <HAnimJoint USE='hanim_skullbase' containerField='joints'/> |
| 236 | <HAnimJoint USE='hanim_vl5' containerField='joints'/> |
| 237 | <HAnimJoint USE='hanim_l_ankle' containerField='joints'/> |
| 238 | <HAnimJoint USE='hanim_r_ankle' containerField='joints'/> |
| 239 | <HAnimJoint USE='hanim_l_elbow' containerField='joints'/> |
| 240 | <HAnimJoint USE='hanim_r_elbow' containerField='joints'/> |
| 241 | <HAnimJoint USE='hanim_l_hip' containerField='joints'/> |
| 242 | <HAnimJoint USE='hanim_r_hip' containerField='joints'/> |
| 243 | <HAnimJoint USE='hanim_l_knee' containerField='joints'/> |
| 244 | <HAnimJoint USE='hanim_r_knee' containerField='joints'/> |
| 245 | <HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/> |
| 246 | <HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/> |
| 247 | <HAnimJoint USE='hanim_l_shoulder' containerField='joints'/> |
| 248 | <HAnimJoint USE='hanim_r_shoulder' containerField='joints'/> |
| 249 | <HAnimJoint USE='hanim_l_wrist' containerField='joints'/> |
| 250 | <HAnimJoint USE='hanim_r_wrist' containerField='joints'/> |
| 251 | <HAnimSegment USE='hanim_pelvis' containerField='segments'/> |
| 252 | <HAnimSegment USE='hanim_l1' containerField='segments'/> |
| 253 | <HAnimSegment USE='hanim_c4' containerField='segments'/> |
| 254 | <HAnimSegment USE='hanim_skull' containerField='segments'/> |
| 255 | <HAnimSegment USE='hanim_l_calf' containerField='segments'/> |
| 256 | <HAnimSegment USE='hanim_r_calf' containerField='segments'/> |
| 257 | <HAnimSegment USE='hanim_l_forearm' containerField='segments'/> |
| 258 | <HAnimSegment USE='hanim_r_forearm' containerField='segments'/> |
| 259 | <HAnimSegment USE='hanim_l_hand' containerField='segments'/> |
| 260 | <HAnimSegment USE='hanim_r_hand' containerField='segments'/> |
| 261 | <HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/> |
| 262 | <HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/> |
| 263 | <HAnimSegment USE='hanim_l_middistal' containerField='segments'/> |
| 264 | <HAnimSegment USE='hanim_r_middistal' containerField='segments'/> |
| 265 | <HAnimSegment USE='hanim_l_thigh' containerField='segments'/> |
| 266 | <HAnimSegment USE='hanim_r_thigh' containerField='segments'/> |
| 267 | <HAnimSegment USE='hanim_l_upperarm' containerField='segments'/> |
| 268 | <HAnimSegment USE='hanim_r_upperarm' containerField='segments'/> |
| 269 | <HAnimSite USE='hanim_skull_tip' containerField='sites'/> |
| 270 | <HAnimSite USE='hanim_sellion_pt' containerField='sites'/> |
| 271 | <HAnimSite USE='hanim_supramenton_pt' containerField='sites'/> |
| 272 | <HAnimSite USE='hanim_nuchale_pt' containerField='sites'/> |
| 273 | <HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/> |
| 274 | <HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/> |
| 275 | <HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/> |
| 276 | <HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/> |
| 277 | <HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/> |
| 278 | <HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/> |
| 279 | <HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/> |
| 280 | <HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/> |
| 281 | <HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/> |
| 282 | <HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/> |
| 283 | <HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/> |
| 284 | <HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/> |
| 285 | <HAnimSite USE='hanim_l_hand_tip' containerField='sites'/> |
| 286 | <HAnimSite USE='hanim_r_hand_tip' containerField='sites'/> |
| 287 | <HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/> |
| 288 | <HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/> |
| 289 | <HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/> |
| 290 | <HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/> |
| 291 | <HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/> |
| 292 | <HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/> |
| 293 | <HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/> |
| 294 | <HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/> |
| 295 | <HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/> |
| 296 | <HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/> |
| 297 | <HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/> |
| 298 | <HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/> |
| 299 | <HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/> |
| 300 | <HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/> |
| 301 | <HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/> |
| 302 | <HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/> |
| 303 | <HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/> |
| 304 | <HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/> |
| 305 | <HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/> |
| 306 | <HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/> |
| 307 | <HAnimSite USE='hanim_l_middistal_tip' containerField='sites'/> |
| 308 | <HAnimSite USE='hanim_r_middistal_tip' containerField='sites'/> |
| 309 | <HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/> |
| 310 | <HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/> |
| 311 | <HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/> |
| 312 | <HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/> |
| 313 | <HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/> |
| 314 | <HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/> |
| 315 | <HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/> |
| 316 | <HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/> |
| 317 | <HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/> |
| 318 | <HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/> |
| 319 | <HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/> |
| 320 | <HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/> |
| 321 | </HAnimHumanoid> |
| 322 | </Scene> |
| 323 | </X3D> |
HAnimHumanoid model visualization report: humanoid HAnimHumanoid Report
-->
<!--
![]() DEF nodes index:
DiamondShape,
hanim_c4,
hanim_DiamondManLOA_1_view,
hanim_humanoid,
hanim_HumanoidRoot,
hanim_l_ankle,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_tip,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middistal_tip,
hanim_l_midtarsal,
hanim_l_olecranon_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_shoulder,
hanim_l_sphyrion_pt,
hanim_l_thigh,
hanim_l_tragion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_nuchale_pt,
hanim_pelvis,
hanim_r_ankle,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_tip,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middistal_tip,
hanim_r_midtarsal,
hanim_r_olecranon_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_thigh,
hanim_r_tragion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_sacroiliac,
hanim_sellion_pt,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_supramenton_pt,
hanim_vc4,
hanim_vl1,
hanim_vl5,
l_forearm_adjust,
l_hand_adjust,
l_upperarm_adjust,
points,
r_forearm_adjust,
r_hand_adjust,
r_upperarm_adjust
DEF nodes index:
DiamondShape,
hanim_c4,
hanim_DiamondManLOA_1_view,
hanim_humanoid,
hanim_HumanoidRoot,
hanim_l_ankle,
hanim_l_calcaneous_post_pt,
hanim_l_calf,
hanim_l_dactylion_pt,
hanim_l_digit2_pt,
hanim_l_elbow,
hanim_l_femoral_lateral_epicn_pt,
hanim_l_femoral_medial_epicn_pt,
hanim_l_forearm,
hanim_l_gonion_pt,
hanim_l_hand,
hanim_l_hand_tip,
hanim_l_hindfoot,
hanim_l_hip,
hanim_l_humeral_lateral_epicn_pt,
hanim_l_humeral_medial_epicn_pt,
hanim_l_infraorbitale_pt,
hanim_l_knee,
hanim_l_knee_crease_pt,
hanim_l_lateral_malleolus_pt,
hanim_l_medial_malleolus_pt,
hanim_l_metacarpal_pha2_pt,
hanim_l_metacarpal_pha5_pt,
hanim_l_metatarsal_pha1_pt,
hanim_l_metatarsal_pha5_pt,
hanim_l_middistal,
hanim_l_middistal_tip,
hanim_l_midtarsal,
hanim_l_olecranon_pt,
hanim_l_radial_styloid_pt,
hanim_l_radiale_pt,
hanim_l_shoulder,
hanim_l_sphyrion_pt,
hanim_l_thigh,
hanim_l_tragion_pt,
hanim_l_ulnar_styloid_pt,
hanim_l_upperarm,
hanim_l_wrist,
hanim_l1,
hanim_nuchale_pt,
hanim_pelvis,
hanim_r_ankle,
hanim_r_calcaneous_post_pt,
hanim_r_calf,
hanim_r_dactylion_pt,
hanim_r_digit2_pt,
hanim_r_elbow,
hanim_r_femoral_lateral_epicn_pt,
hanim_r_femoral_medial_epicn_pt,
hanim_r_forearm,
hanim_r_gonion_pt,
hanim_r_hand,
hanim_r_hand_tip,
hanim_r_hindfoot,
hanim_r_hip,
hanim_r_humeral_lateral_epicn_pt,
hanim_r_humeral_medial_epicn_pt,
hanim_r_infraorbitale_pt,
hanim_r_knee,
hanim_r_knee_crease_pt,
hanim_r_lateral_malleolus_pt,
hanim_r_medial_malleolus_pt,
hanim_r_metacarpal_pha2_pt,
hanim_r_metacarpal_pha5_pt,
hanim_r_metatarsal_pha1_pt,
hanim_r_metatarsal_pha5_pt,
hanim_r_middistal,
hanim_r_middistal_tip,
hanim_r_midtarsal,
hanim_r_olecranon_pt,
hanim_r_radial_styloid_pt,
hanim_r_radiale_pt,
hanim_r_shoulder,
hanim_r_sphyrion_pt,
hanim_r_thigh,
hanim_r_tragion_pt,
hanim_r_ulnar_styloid_pt,
hanim_r_upperarm,
hanim_r_wrist,
hanim_sacroiliac,
hanim_sellion_pt,
hanim_skull,
hanim_skull_tip,
hanim_skullbase,
hanim_supramenton_pt,
hanim_vc4,
hanim_vl1,
hanim_vl5,
l_forearm_adjust,
l_hand_adjust,
l_upperarm_adjust,
points,
r_forearm_adjust,
r_hand_adjust,
r_upperarm_adjust
Index for Viewpoint nodes: Viewpoint_1, FrontView, InclinedView, SideView, TopView
-->=============================================================================================================================
HAnimHumanoid hanim_humanoid skeleton holds X3D3 HAnim1 joints/segments/sites.
[key] jointname : segmentname ^ sitename
[nodes] HAnimJoint (20), : HAnimSegment (18), % HAnimDisplacer (0), $ HAnimMotion (0), ^ HAnimSite (53), @ skin nodes (0)
=============================================================================================================================
HAnimHumanoid DEF='hanim_humanoid name='humanoid' loa=''
skeleton
humanoid_root
sacroiliac : pelvis
| l_hip : l_thigh ^ l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
| | l_knee : l_calf
| | l_ankle : l_hindfoot ^ l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
| | l_midtarsal : l_middistal ^ l_middistal_tip, l_metatarsal_pha5_pt, l_metatarsal_pha1_pt, l_digit2_pt
| r_hip : r_thigh ^ r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
| r_knee : r_calf
| r_ankle : r_hindfoot ^ r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
| r_midtarsal : r_middistal ^ r_middistal_tip, r_metatarsal_pha5_pt, r_metatarsal_pha1_pt, r_digit2_pt
vl1 : l1
| l_shoulder : l_upperarm ^ l_humeral_lateral_epicn_pt
| | l_elbow : l_forearm ^ l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
| | l_wrist : l_hand ^ l_hand_tip, l_metacarpal_pha2_pt, l_dactylion_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt
| r_shoulder : r_upperarm ^ r_humeral_lateral_epicn_pt
| | r_elbow : r_forearm ^ r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
| | r_wrist : r_hand ^ r_hand_tip, r_metacarpal_pha2_pt, r_dactylion_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt
| vc4 : c4
vl5
skullbase : skull ^ skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
^ HAnimHumanoid humanoid holds 1 HAnimSite node: DiamondManLOA_1_view
^ HAnimSegment l_thigh holds 3 HAnimSite nodes: l_knee_crease_pt, l_femoral_lateral_epicn_pt, l_femoral_medial_epicn_pt
^ HAnimSegment l_hindfoot holds 4 HAnimSite nodes: l_lateral_malleolus_pt, l_medial_malleolus_pt, l_sphyrion_pt, l_calcaneous_post_pt
^ HAnimSegment l_middistal holds 4 HAnimSite nodes: l_middistal_tip, l_metatarsal_pha5_pt, l_metatarsal_pha1_pt, l_digit2_pt
^ HAnimSegment r_thigh holds 3 HAnimSite nodes: r_knee_crease_pt, r_femoral_lateral_epicn_pt, r_femoral_medial_epicn_pt
^ HAnimSegment r_hindfoot holds 4 HAnimSite nodes: r_lateral_malleolus_pt, r_medial_malleolus_pt, r_sphyrion_pt, r_calcaneous_post_pt
^ HAnimSegment r_middistal holds 4 HAnimSite nodes: r_middistal_tip, r_metatarsal_pha5_pt, r_metatarsal_pha1_pt, r_digit2_pt
^ HAnimSegment l_upperarm holds 1 HAnimSite node: l_humeral_lateral_epicn_pt
^ HAnimSegment l_forearm holds 4 HAnimSite nodes: l_radial_styloid_pt, l_olecranon_pt, l_humeral_medial_epicn_pt, l_radiale_pt
^ HAnimSegment l_hand holds 5 HAnimSite nodes: l_hand_tip, l_metacarpal_pha2_pt, l_dactylion_pt, l_ulnar_styloid_pt, l_metacarpal_pha5_pt
^ HAnimSegment r_upperarm holds 1 HAnimSite node: r_humeral_lateral_epicn_pt
^ HAnimSegment r_forearm holds 4 HAnimSite nodes: r_radial_styloid_pt, r_olecranon_pt, r_humeral_medial_epicn_pt, r_radiale_pt
^ HAnimSegment r_hand holds 5 HAnimSite nodes: r_hand_tip, r_metacarpal_pha2_pt, r_dactylion_pt, r_ulnar_styloid_pt, r_metacarpal_pha5_pt
^ HAnimSegment skull holds 10 HAnimSite nodes: skull_tip, sellion_pt, r_infraorbitale_pt, l_infraorbitale_pt, supramenton_pt, r_tragion_pt, r_gonion_pt, l_tragion_pt, l_gonion_pt, nuchale_pt
=============================================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes. Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
| <HAnimHumanoid DEF='hanim_humanoid' name='humanoid' version ='1.0' > | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 36 | <!-- original HAnimHumanoid info='"authorEmail=beitler@graphics.cis.upenn.edu beitler@acm.org" "authorName=Matthew T. Beitler" "copyright=Copyright 1999 Matthew T. Beitler" "humanoidVersion=JointCenters 1.1 LOA1" "usageRestrictions=PERMISSION TO FULLY USE THIS SCENE GRAPH IS GRANTED PROVIDED THIS COPYRIGHT INFORMATION AND DOCUMENTATION OF THE ORIGINAL AUTHOR IS INCLUDED. This humanoid scene graph is provided _as-is_ and without warranty of any kind express implied or otherwise including without limitation any warranty of merchantability or fitness for a particular purpose."' --> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 226 | <Viewpoint DEF='InclinedView' description='Inclined View' orientation='-0.113 0.993 0.0347 0.671' position='1.62 1.05 2.06'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 227 | <Viewpoint DEF='FrontView' description='Front View' position='0 0.854 2.57665'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 228 | <Viewpoint DEF='SideView' description='Side View' orientation='0 1 0 1.57079' position='2.5929 0.854 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 229 | <Viewpoint DEF='TopView' description='Top View' orientation='1 0 0 -1.57079' position='0 3.4495 0'/> | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
231 |
<HAnimJoint USE='hanim_HumanoidRoot' containerField='joints'/>
|
232 |
<HAnimJoint USE='hanim_sacroiliac' containerField='joints'/>
|
233 |
<HAnimJoint USE='hanim_vl1' containerField='joints'/>
|
234 |
<HAnimJoint USE='hanim_vc4' containerField='joints'/>
|
235 |
<HAnimJoint USE='hanim_skullbase' containerField='joints'/>
|
236 |
<HAnimJoint USE='hanim_vl5' containerField='joints'/>
|
237 |
<HAnimJoint USE='hanim_l_ankle' containerField='joints'/>
|
238 |
<HAnimJoint USE='hanim_r_ankle' containerField='joints'/>
|
239 |
<HAnimJoint USE='hanim_l_elbow' containerField='joints'/>
|
240 |
<HAnimJoint USE='hanim_r_elbow' containerField='joints'/>
|
241 |
<HAnimJoint USE='hanim_l_hip' containerField='joints'/>
|
242 |
<HAnimJoint USE='hanim_r_hip' containerField='joints'/>
|
243 |
<HAnimJoint USE='hanim_l_knee' containerField='joints'/>
|
244 |
<HAnimJoint USE='hanim_r_knee' containerField='joints'/>
|
245 |
<HAnimJoint USE='hanim_l_midtarsal' containerField='joints'/>
|
246 |
<HAnimJoint USE='hanim_r_midtarsal' containerField='joints'/>
|
247 |
<HAnimJoint USE='hanim_l_shoulder' containerField='joints'/>
|
248 |
<HAnimJoint USE='hanim_r_shoulder' containerField='joints'/>
|
249 |
<HAnimJoint USE='hanim_l_wrist' containerField='joints'/>
|
250 |
<HAnimJoint USE='hanim_r_wrist' containerField='joints'/>
|
251 |
<HAnimSegment USE='hanim_pelvis' containerField='segments'/>
|
252 |
<HAnimSegment USE='hanim_l1' containerField='segments'/>
|
253 |
<HAnimSegment USE='hanim_c4' containerField='segments'/>
|
254 |
<HAnimSegment USE='hanim_skull' containerField='segments'/>
|
255 |
<HAnimSegment USE='hanim_l_calf' containerField='segments'/>
|
256 |
<HAnimSegment USE='hanim_r_calf' containerField='segments'/>
|
257 |
<HAnimSegment USE='hanim_l_forearm' containerField='segments'/>
|
258 |
<HAnimSegment USE='hanim_r_forearm' containerField='segments'/>
|
259 |
<HAnimSegment USE='hanim_l_hand' containerField='segments'/>
|
260 |
<HAnimSegment USE='hanim_r_hand' containerField='segments'/>
|
261 |
<HAnimSegment USE='hanim_l_hindfoot' containerField='segments'/>
|
262 |
<HAnimSegment USE='hanim_r_hindfoot' containerField='segments'/>
|
263 |
<HAnimSegment USE='hanim_l_middistal' containerField='segments'/>
|
264 |
<HAnimSegment USE='hanim_r_middistal' containerField='segments'/>
|
265 |
<HAnimSegment USE='hanim_l_thigh' containerField='segments'/>
|
266 |
<HAnimSegment USE='hanim_r_thigh' containerField='segments'/>
|
267 |
<HAnimSegment USE='hanim_l_upperarm' containerField='segments'/>
|
268 |
<HAnimSegment USE='hanim_r_upperarm' containerField='segments'/>
|
269 |
<HAnimSite USE='hanim_skull_tip' containerField='sites'/>
|
270 |
<HAnimSite USE='hanim_sellion_pt' containerField='sites'/>
|
271 |
<HAnimSite USE='hanim_supramenton_pt' containerField='sites'/>
|
272 |
<HAnimSite USE='hanim_nuchale_pt' containerField='sites'/>
|
273 |
<HAnimSite USE='hanim_l_calcaneous_post_pt' containerField='sites'/>
|
274 |
<HAnimSite USE='hanim_r_calcaneous_post_pt' containerField='sites'/>
|
275 |
<HAnimSite USE='hanim_l_dactylion_pt' containerField='sites'/>
|
276 |
<HAnimSite USE='hanim_r_dactylion_pt' containerField='sites'/>
|
277 |
<HAnimSite USE='hanim_l_digit2_pt' containerField='sites'/>
|
278 |
<HAnimSite USE='hanim_r_digit2_pt' containerField='sites'/>
|
279 |
<HAnimSite USE='hanim_l_femoral_lateral_epicn_pt' containerField='sites'/>
|
280 |
<HAnimSite USE='hanim_r_femoral_lateral_epicn_pt' containerField='sites'/>
|
281 |
<HAnimSite USE='hanim_l_femoral_medial_epicn_pt' containerField='sites'/>
|
282 |
<HAnimSite USE='hanim_r_femoral_medial_epicn_pt' containerField='sites'/>
|
283 |
<HAnimSite USE='hanim_r_gonion_pt' containerField='sites'/>
|
284 |
<HAnimSite USE='hanim_l_gonion_pt' containerField='sites'/>
|
285 |
<HAnimSite USE='hanim_l_hand_tip' containerField='sites'/>
|
286 |
<HAnimSite USE='hanim_r_hand_tip' containerField='sites'/>
|
287 |
<HAnimSite USE='hanim_l_humeral_lateral_epicn_pt' containerField='sites'/>
|
288 |
<HAnimSite USE='hanim_r_humeral_lateral_epicn_pt' containerField='sites'/>
|
289 |
<HAnimSite USE='hanim_l_humeral_medial_epicn_pt' containerField='sites'/>
|
290 |
<HAnimSite USE='hanim_r_humeral_medial_epicn_pt' containerField='sites'/>
|
291 |
<HAnimSite USE='hanim_r_infraorbitale_pt' containerField='sites'/>
|
292 |
<HAnimSite USE='hanim_l_infraorbitale_pt' containerField='sites'/>
|
293 |
<HAnimSite USE='hanim_l_knee_crease_pt' containerField='sites'/>
|
294 |
<HAnimSite USE='hanim_r_knee_crease_pt' containerField='sites'/>
|
295 |
<HAnimSite USE='hanim_l_lateral_malleolus_pt' containerField='sites'/>
|
296 |
<HAnimSite USE='hanim_r_lateral_malleolus_pt' containerField='sites'/>
|
297 |
<HAnimSite USE='hanim_l_medial_malleolus_pt' containerField='sites'/>
|
298 |
<HAnimSite USE='hanim_r_medial_malleolus_pt' containerField='sites'/>
|
299 |
<HAnimSite USE='hanim_l_metacarpal_pha2_pt' containerField='sites'/>
|
300 |
<HAnimSite USE='hanim_r_metacarpal_pha2_pt' containerField='sites'/>
|
301 |
<HAnimSite USE='hanim_l_metacarpal_pha5_pt' containerField='sites'/>
|
302 |
<HAnimSite USE='hanim_r_metacarpal_pha5_pt' containerField='sites'/>
|
303 |
<HAnimSite USE='hanim_l_metatarsal_pha1_pt' containerField='sites'/>
|
304 |
<HAnimSite USE='hanim_r_metatarsal_pha1_pt' containerField='sites'/>
|
305 |
<HAnimSite USE='hanim_l_metatarsal_pha5_pt' containerField='sites'/>
|
306 |
<HAnimSite USE='hanim_r_metatarsal_pha5_pt' containerField='sites'/>
|
307 |
<HAnimSite USE='hanim_l_middistal_tip' containerField='sites'/>
|
308 |
<HAnimSite USE='hanim_r_middistal_tip' containerField='sites'/>
|
309 |
<HAnimSite USE='hanim_l_olecranon_pt' containerField='sites'/>
|
310 |
<HAnimSite USE='hanim_r_olecranon_pt' containerField='sites'/>
|
311 |
<HAnimSite USE='hanim_l_radial_styloid_pt' containerField='sites'/>
|
312 |
<HAnimSite USE='hanim_r_radial_styloid_pt' containerField='sites'/>
|
313 |
<HAnimSite USE='hanim_l_radiale_pt' containerField='sites'/>
|
314 |
<HAnimSite USE='hanim_r_radiale_pt' containerField='sites'/>
|
315 |
<HAnimSite USE='hanim_l_sphyrion_pt' containerField='sites'/>
|
316 |
<HAnimSite USE='hanim_r_sphyrion_pt' containerField='sites'/>
|
317 |
<HAnimSite USE='hanim_r_tragion_pt' containerField='sites'/>
|
318 |
<HAnimSite USE='hanim_l_tragion_pt' containerField='sites'/>
|
319 |
<HAnimSite USE='hanim_l_ulnar_styloid_pt' containerField='sites'/>
|
320 |
<HAnimSite USE='hanim_r_ulnar_styloid_pt' containerField='sites'/>
|
|
|
|
</HAnimHumanoid> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
<!--
Online at
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}