
| 1 |
<?xml version="1.0" encoding="UTF-8"?>
|
| 2 |
<!DOCTYPE X3D PUBLIC "ISO//Web3D//DTD X3D 4.0//EN" "https://www.web3d.org/specifications/x3d-4.0.dtd">
|
| 3 | <X3D profile='Immersive' version='4.0' xmlns:xsd='http://www.w3.org/2001/XMLSchema-instance' xsd:noNamespaceSchemaLocation='https://www.web3d.org/specifications/x3d-4.0.xsd'> |
| 4 | <head> |
| 5 | <component level='1' name='HAnim'/> |
| 6 | <meta name='title' content=' HAnimModelHandRight.x3d '/> |
| 7 | <meta name='description' content='Right hand using high-fidelity definitions for HAnim version 2.0'/> |
| 8 | <meta name='creator' content='Kwan Hee YOO, Don Brutzman and Joe Williams'/> |
| 9 | <meta name='created' content='26 January 2015'/> |
| 10 | <meta name='modified' content='16 February 2026'/> |
| 11 | <meta name=' TODO ' content=' fix visible geometry for thumb and index finger, midcarpal_1 and midcarpal_2 '/> |
| 12 |
<meta name='Image' content='HAnimModelHandRightSegmentVisualizationError.png'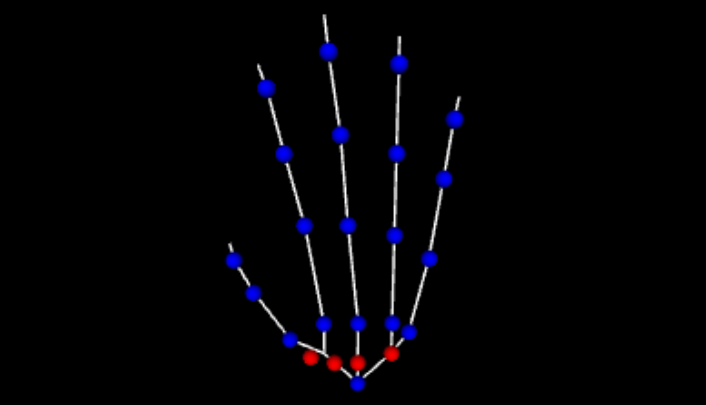 /> />
|
| 13 | <meta name=' error ' content=' not yet to scale, also relatively flat '/> |
| 14 | <meta name=' TODO ' content=' describe how to compute and apply offsets for center values whenever attaching this appendage to a body '/> |
| 15 | <meta name='reference' content='https://www.web3d.org/working-groups/humanoid-animation-HAnim'/> |
| 16 | <meta name='reference' content='https://www.web3d.org/documents/specifications/19774/V2.0'/> |
| 17 | <meta name='reference' content='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#TheHands'/> |
| 18 | <meta name='reference' content='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#f-HandJoints'/> |
| 19 | <meta name='reference' content='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#Hierarchy4'/> |
| 20 | <meta name='reference' content=' https://www.web3d.org/specifications/X3Dv4/ISO-IEC19775-1v4-IS/Part01/components/hanim.html '/> |
| 21 | <meta name='subject' content='X3D HAnim humanoid animation'/> |
| 22 | <meta name=' TODO ' content=' Integrate and confirm Segment/Joint names, Viewpoints. '/> |
| 23 | <meta name='identifier' content=' https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Characters/HAnimModelHandRight.x3d '/> |
| 24 | <meta name='generator' content='X3D-Edit 3.3, https://www.web3d.org/x3d/tools/X3D-Edit'/> |
| 25 | <meta name='license' content='../license.html'/> |
| 26 | </head> |
| 27 | <Scene> |
| 28 | <WorldInfo title='HAnimModelHandRight.x3d'/> |
| 29 | <HAnimHumanoid DEF='hanim_Hand_Right' loa='4' name='Hand_Right'> |
| 30 | <!-- original HAnimHumanoid info='"authorName=Kwan Hee YOO, Don Brutzman and Joe Williams"' --> |
| 31 | <MetadataSet containerField='metadata' name='HAnimHumanoid.info' reference='https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/ObjectInterfaces.html#Humanoid'> |
| 32 | <MetadataString name='authorName' value='"Kwan Hee YOO, Don Brutzman and Joe Williams"'/> |
| 33 | </MetadataSet> |
| 34 |
<!-- HAnimJoint
hanim_humanoid_root is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_humanoid_root' containerField='skeleton' name='humanoid_root'> |
| 35 | <!-- Might consider putting a HAnimSegment here, but that doesn't help with re-use of this hand model --> |
| 36 |
<!-- HAnimJoint
hanim_r_radiocarpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_radiocarpal' description='connection joint of hand to leg above' name='r_radiocarpal'> |
| 37 |
<!-- HAnimSegment
hanim_r_carpal is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal' name='r_carpal'> |
| 38 | <Transform> |
| 39 | |
| 40 | <Sphere radius='0.025'/> |
| 41 | <Appearance DEF='HAnimJointAppearanceBlue'> |
| 42 | <Material diffuseColor='0 0 1'/> |
| 43 | </Appearance> |
| 44 | </Shape> |
| 45 | </Transform> |
| 46 | <Shape> |
| 47 | <Appearance> |
| 48 | <Material emissiveColor='1 1 1'/> |
| 49 | </Appearance> |
| 50 | <IndexedLineSet DEF='RCToMC12' coordIndex='0 1'> |
| 51 | <Coordinate point='0 0 0 -0.1 0.1 0'/> |
| 52 | </IndexedLineSet> |
| 53 | </Shape> |
| 54 | <Shape> |
| 55 | <Appearance> |
| 56 | <Material emissiveColor='1 1 1'/> |
| 57 | </Appearance> |
| 58 | <IndexedLineSet DEF='RCToMC3' coordIndex='0 1'> |
| 59 | <Coordinate point='0 0 0 0 0.07 0'/> |
| 60 | </IndexedLineSet> |
| 61 | </Shape> |
| 62 | <Shape> |
| 63 | <Appearance> |
| 64 | <Material emissiveColor='1 1 1'/> |
| 65 | </Appearance> |
| 66 | <IndexedLineSet DEF='RCToMC45' coordIndex='0 1'> |
| 67 | <Coordinate point='0 0 0 0.1 0.1 0'/> |
| 68 | </IndexedLineSet> |
| 69 | </Shape> |
| 70 | </HAnimSegment> |
| 71 | <!-- MC1 --> |
| 72 |
<!-- HAnimJoint
hanim_r_midcarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midcarpal_1' center='-0.14 0.09 0' name='r_midcarpal_1'> |
| 73 |
<!-- HAnimSegment
hanim_r_trapezium is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_trapezium' name='r_trapezium'> |
| 74 | <Transform translation='-0.14 0.09 0'> |
| 75 |
<!-- Shape
HAnimNewJointShape is a DEF node that has 3 USE nodes: USE_1, USE_2, USE_3 -->
<Shape DEF='HAnimNewJointShape'> |
| 76 | <Sphere radius='0.025'/> |
| 77 | <Appearance DEF='HAnimJointAppearanceRed'> |
| 78 | <Material diffuseColor='1 0 0'/> |
| 79 | </Appearance> |
| 80 | </Shape> |
| 81 | </Transform> |
| 82 | <Shape> |
| 83 | <Appearance> |
| 84 | <Material emissiveColor='1 1 1'/> |
| 85 | </Appearance> |
| 86 | <IndexedLineSet DEF='MC12toCMC1' coordIndex='0 1'> |
| 87 | <Coordinate point='-0.1 0.1 0 -0.2 0.15 0'/> |
| 88 | </IndexedLineSet> |
| 89 | </Shape> |
| 90 | </HAnimSegment> |
| 91 | <!-- thumb finger --> |
| 92 |
<!-- HAnimJoint
hanim_r_carpometacarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpometacarpal_1' center='-0.2 0.15 0' name='r_carpometacarpal_1'> |
| 93 |
<!-- HAnimSegment
hanim_r_metacarpal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_metacarpal_1' name='r_metacarpal_1'> |
| 94 | <Transform translation='-0.2 0.15 0'> |
| 95 | <Shape USE='HAnimJointShape'/> |
| 96 | </Transform> |
| 97 | <Shape> |
| 98 | <Appearance> |
| 99 | <Material emissiveColor='1 1 1'/> |
| 100 | </Appearance> |
| 101 | <IndexedLineSet DEF='CMC1toMCP1xxx' coordIndex='0 1'> |
| 102 | <Coordinate point='-0.2 0.15 0 -0.3 0.3 0'/> |
| 103 | </IndexedLineSet> |
| 104 | </Shape> |
| 105 | </HAnimSegment> |
| 106 |
<!-- HAnimJoint
hanim_r_metacarpophalangeal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metacarpophalangeal_1' center='-0.3 0.3 0' name='r_metacarpophalangeal_1'> |
| 107 |
<!-- HAnimSegment
hanim_r_carpal_proximal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_proximal_phalanx_1' name='r_carpal_proximal_phalanx_1'> |
| 108 | <Transform translation='-0.3 0.3 0'> |
| 109 | <Shape USE='HAnimJointShape'/> |
| 110 | </Transform> |
| 111 | <Shape> |
| 112 | <Appearance> |
| 113 | <Material emissiveColor='1 1 1'/> |
| 114 | </Appearance> |
| 115 | <IndexedLineSet DEF='MCP11toIP1' coordIndex='0 1'> |
| 116 | <Coordinate point='-0.3 0.3 0 -0.35 0.4 0'/> |
| 117 | </IndexedLineSet> |
| 118 | </Shape> |
| 119 | </HAnimSegment> |
| 120 |
<!-- HAnimJoint
hanim_r_carpal_interphalangeal_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_interphalangeal_1' center='-0.35 0.4 0' name='r_carpal_interphalangeal_1'> |
| 121 |
<!-- HAnimSegment
hanim_r_carpal_distal_phalanx_1 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_distal_phalanx_1' name='r_carpal_distal_phalanx_1'> |
| 122 | <Transform translation='-0.35 0.4 0'> |
| 123 | <Shape USE='HAnimJointShape'/> |
| 124 | </Transform> |
| 125 | <Shape> |
| 126 | <Appearance> |
| 127 | <Material emissiveColor='1 1 1'/> |
| 128 | </Appearance> |
| 129 | <IndexedLineSet DEF='fingertip_r_carpal_interphalangeal_1' coordIndex='0 1'> |
| 130 | <Coordinate point='-0.35 0.4 0 -0.36 0.45 0'/> |
| 131 | </IndexedLineSet> |
| 132 | </Shape> |
| 133 | </HAnimSegment> |
| 134 | </HAnimJoint> |
| 135 | </HAnimJoint> |
| 136 | </HAnimJoint> |
| 137 | </HAnimJoint> |
| 138 | <!-- MC2 --> |
| 139 |
<!-- HAnimJoint
hanim_r_midcarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midcarpal_2' center='-0.07 0.07 0' name='r_midcarpal_2'> |
| 140 |
<!-- HAnimSegment
hanim_r_trapezoid is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_trapezoid' name='r_trapezoid'> |
| 141 | <Transform translation='-0.07 0.07 0'> |
| 142 | <Shape USE='HAnimNewJointShape'/> |
| 143 | </Transform> |
| 144 | <Shape> |
| 145 | <Appearance> |
| 146 | <Material emissiveColor='1 1 1'/> |
| 147 | </Appearance> |
| 148 | <IndexedLineSet DEF='MC12toCMC2' coordIndex='0 1'> |
| 149 | <Coordinate point='-0.1 0.1 0 -0.1 0.2 0'/> |
| 150 | </IndexedLineSet> |
| 151 | </Shape> |
| 152 | </HAnimSegment> |
| 153 | <!-- index finger --> |
| 154 |
<!-- HAnimJoint
hanim_r_carpometacarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpometacarpal_2' center='-0.1 0.2 0' name='r_carpometacarpal_2'> |
| 155 |
<!-- HAnimSegment
hanim_r_metacarpal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_metacarpal_2' name='r_metacarpal_2'> |
| 156 | <Transform translation='-0.1 0.2 0'> |
| 157 | <Shape USE='HAnimJointShape'/> |
| 158 | </Transform> |
| 159 | <Shape> |
| 160 | <Appearance> |
| 161 | <Material emissiveColor='1 1 1'/> |
| 162 | </Appearance> |
| 163 | <IndexedLineSet DEF='CMC2toMCP2' coordIndex='0 1'> |
| 164 | <Coordinate point='-0.1 0.2 0 -0.15 0.5 0'/> |
| 165 | </IndexedLineSet> |
| 166 | </Shape> |
| 167 | </HAnimSegment> |
| 168 |
<!-- HAnimJoint
hanim_r_metacarpophalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metacarpophalangeal_2' center='-0.15 0.5 0' name='r_metacarpophalangeal_2'> |
| 169 |
<!-- HAnimSegment
hanim_r_carpal_proximal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_proximal_phalanx_2' name='r_carpal_proximal_phalanx_2'> |
| 170 | <Transform translation='-0.15 0.5 0'> |
| 171 | <Shape USE='HAnimJointShape'/> |
| 172 | </Transform> |
| 173 | <Shape> |
| 174 | <Appearance> |
| 175 | <Material emissiveColor='1 1 1'/> |
| 176 | </Appearance> |
| 177 | <IndexedLineSet DEF='MCP2toPIP2' coordIndex='0 1'> |
| 178 | <Coordinate point='-0.15 0.5 0 -0.2 0.7 0'/> |
| 179 | </IndexedLineSet> |
| 180 | </Shape> |
| 181 | </HAnimSegment> |
| 182 |
<!-- HAnimJoint
hanim_r_carpal_proximal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_proximal_interphalangeal_2' center='-0.2 0.7 0' name='r_carpal_proximal_interphalangeal_2'> |
| 183 |
<!-- HAnimSegment
hanim_r_carpal_middle_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_middle_phalanx_2' name='r_carpal_middle_phalanx_2'> |
| 184 | <Transform translation='-0.2 0.7 0'> |
| 185 | <Shape USE='HAnimJointShape'/> |
| 186 | </Transform> |
| 187 | <Shape> |
| 188 | <Appearance> |
| 189 | <Material emissiveColor='1 1 1'/> |
| 190 | </Appearance> |
| 191 | <IndexedLineSet DEF='PIP2toDIP2' coordIndex='0 1'> |
| 192 | <Coordinate point='-0.2 0.7 0 -0.24 0.87 0'/> |
| 193 | </IndexedLineSet> |
| 194 | </Shape> |
| 195 | </HAnimSegment> |
| 196 |
<!-- HAnimJoint
hanim_r_carpal_distal_interphalangeal_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_distal_interphalangeal_2' center='-0.24 0.87 0' name='r_carpal_distal_interphalangeal_2'> |
| 197 |
<!-- HAnimSegment
hanim_r_carpal_distal_phalanx_2 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_distal_phalanx_2' name='r_carpal_distal_phalanx_2'> |
| 198 | <Transform translation='-0.24 0.87 0'> |
| 199 | <Shape USE='HAnimJointShape'/> |
| 200 | </Transform> |
| 201 | <Shape> |
| 202 | <Appearance> |
| 203 | <Material emissiveColor='1 1 1'/> |
| 204 | </Appearance> |
| 205 | <IndexedLineSet DEF='fingertip_r_carpal_distal_interphalangeal_2' coordIndex='0 1'> |
| 206 | <Coordinate point='-0.24 0.87 0 -0.26 0.93 0'/> |
| 207 | </IndexedLineSet> |
| 208 | </Shape> |
| 209 | </HAnimSegment> |
| 210 | </HAnimJoint> |
| 211 | </HAnimJoint> |
| 212 | </HAnimJoint> |
| 213 | </HAnimJoint> |
| 214 | </HAnimJoint> |
| 215 | <!-- MC3 --> |
| 216 |
<!-- HAnimJoint
hanim_r_midcarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midcarpal_3' center='0 0.07 0' name='r_midcarpal_3'> |
| 217 |
<!-- HAnimSegment
hanim_r_capitate is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_capitate' name='r_capitate'> |
| 218 | <Transform translation='0 0.07 0'> |
| 219 | <Shape USE='HAnimNewJointShape'/> |
| 220 | </Transform> |
| 221 | <Shape> |
| 222 | <Appearance> |
| 223 | <Material emissiveColor='1 1 1'/> |
| 224 | </Appearance> |
| 225 | <IndexedLineSet DEF='MC3toCMC3' coordIndex='0 1'> |
| 226 | <Coordinate point='0 0.07 0 0 0.2 0'/> |
| 227 | </IndexedLineSet> |
| 228 | </Shape> |
| 229 | </HAnimSegment> |
| 230 | <!-- Middle fingle --> |
| 231 |
<!-- HAnimJoint
hanim_r_carpometacarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpometacarpal_3' center='0 0.2 0' name='r_carpometacarpal_3'> |
| 232 |
<!-- HAnimSegment
hanim_r_metacarpal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_metacarpal_3' name='r_metacarpal_3'> |
| 233 | <Transform translation='0 0.2 0'> |
| 234 | <Shape USE='HAnimJointShape'/> |
| 235 | </Transform> |
| 236 | <Shape> |
| 237 | <Appearance> |
| 238 | <Material emissiveColor='1 1 1'/> |
| 239 | </Appearance> |
| 240 | <IndexedLineSet DEF='CMC3toMCP3' coordIndex='0 1'> |
| 241 | <Coordinate point='0 0.2 0 -0.03 0.5 0'/> |
| 242 | </IndexedLineSet> |
| 243 | </Shape> |
| 244 | </HAnimSegment> |
| 245 |
<!-- HAnimJoint
hanim_r_metacarpophalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metacarpophalangeal_3' center='-0.03 0.5 0' name='r_metacarpophalangeal_3'> |
| 246 |
<!-- HAnimSegment
hanim_r_carpal_proximal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_proximal_phalanx_3' name='r_carpal_proximal_phalanx_3'> |
| 247 | <Transform translation='-0.03 0.5 0'> |
| 248 | <Shape USE='HAnimJointShape'/> |
| 249 | </Transform> |
| 250 | <Shape> |
| 251 | <Appearance> |
| 252 | <Material emissiveColor='1 1 1'/> |
| 253 | </Appearance> |
| 254 | <IndexedLineSet DEF='MCP3toPIP3' coordIndex='0 1'> |
| 255 | <Coordinate point='-0.03 0.5 0 -0.05 0.75 0'/> |
| 256 | </IndexedLineSet> |
| 257 | </Shape> |
| 258 | </HAnimSegment> |
| 259 |
<!-- HAnimJoint
hanim_r_carpal_proximal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_proximal_interphalangeal_3' center='-0.05 0.75 0' name='r_carpal_proximal_interphalangeal_3'> |
| 260 |
<!-- HAnimSegment
hanim_r_carpal_middle_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_middle_phalanx_3' name='r_carpal_middle_phalanx_3'> |
| 261 | <Transform translation='-0.05 0.75 0'> |
| 262 | <Shape USE='HAnimJointShape'/> |
| 263 | </Transform> |
| 264 | <Shape> |
| 265 | <Appearance> |
| 266 | <Material emissiveColor='1 1 1'/> |
| 267 | </Appearance> |
| 268 | <IndexedLineSet DEF='PIP3toDIP3' coordIndex='0 1'> |
| 269 | <Coordinate point='-0.05 0.75 0 -0.08 0.96 0'/> |
| 270 | </IndexedLineSet> |
| 271 | </Shape> |
| 272 | </HAnimSegment> |
| 273 |
<!-- HAnimJoint
hanim_r_carpal_distal_interphalangeal_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_distal_interphalangeal_3' center='-0.08 0.96 0' name='r_carpal_distal_interphalangeal_3'> |
| 274 |
<!-- HAnimSegment
hanim_r_carpal_distal_phalanx_3 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_distal_phalanx_3' name='r_carpal_distal_phalanx_3'> |
| 275 | <Transform translation='-0.08 0.96 0'> |
| 276 | <Shape USE='HAnimJointShape'/> |
| 277 | </Transform> |
| 278 | <Shape> |
| 279 | <Appearance> |
| 280 | <Material emissiveColor='1 1 1'/> |
| 281 | </Appearance> |
| 282 | <IndexedLineSet DEF='fingertip_r_carpal_distal_interphalangeal_3' coordIndex='0 1'> |
| 283 | <Coordinate point='-0.08 0.96 0 -0.09 1.05 0'/> |
| 284 | </IndexedLineSet> |
| 285 | </Shape> |
| 286 | </HAnimSegment> |
| 287 | </HAnimJoint> |
| 288 | </HAnimJoint> |
| 289 | </HAnimJoint> |
| 290 | </HAnimJoint> |
| 291 | </HAnimJoint> |
| 292 | <!-- MC4_5 --> |
| 293 |
<!-- HAnimJoint
hanim_r_midcarpal_4_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_midcarpal_4_5' center='0.1 0.1 0' name='r_midcarpal_4_5'> |
| 294 |
<!-- HAnimSegment
hanim_r_hamate is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_hamate' name='r_hamate'> |
| 295 | <Transform translation='0.1 0.1 0'> |
| 296 | <Shape USE='HAnimNewJointShape'/> |
| 297 | </Transform> |
| 298 | <Shape> |
| 299 | <Appearance> |
| 300 | <Material emissiveColor='1 1 1'/> |
| 301 | </Appearance> |
| 302 | <IndexedLineSet DEF='MC45toCMC4' coordIndex='0 1'> |
| 303 | <Coordinate point='0.1 0.1 0 0.1 0.2 0'/> |
| 304 | </IndexedLineSet> |
| 305 | </Shape> |
| 306 | <Shape> |
| 307 | <Appearance> |
| 308 | <Material emissiveColor='1 1 1'/> |
| 309 | </Appearance> |
| 310 | <IndexedLineSet DEF='MC45toCMC5' coordIndex='0 1'> |
| 311 | <Coordinate point='0.1 0.1 0 0.15 0.17 0'/> |
| 312 | </IndexedLineSet> |
| 313 | </Shape> |
| 314 | </HAnimSegment> |
| 315 | <!-- ring finger --> |
| 316 |
<!-- HAnimJoint
hanim_r_carpometacarpal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpometacarpal_4' center='0.1 0.2 0' name='r_carpometacarpal_4'> |
| 317 |
<!-- HAnimSegment
hanim_r_metacarpal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_metacarpal_4' name='r_metacarpal_4'> |
| 318 | <Transform translation='0.1 0.2 0'> |
| 319 | <Shape USE='HAnimJointShape'/> |
| 320 | </Transform> |
| 321 | <Shape> |
| 322 | <Appearance> |
| 323 | <Material emissiveColor='1 1 1'/> |
| 324 | </Appearance> |
| 325 | <IndexedLineSet DEF='CMC4toMCP4' coordIndex='0 1'> |
| 326 | <Coordinate point='0.1 0.2 0 0.1 0.47 0'/> |
| 327 | </IndexedLineSet> |
| 328 | </Shape> |
| 329 | </HAnimSegment> |
| 330 |
<!-- HAnimJoint
hanim_r_metacarpophalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metacarpophalangeal_4' center='0.1 0.47 0' name='r_metacarpophalangeal_4'> |
| 331 |
<!-- HAnimSegment
hanim_r_carpal_proximal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_proximal_phalanx_4' name='r_carpal_proximal_phalanx_4'> |
| 332 | <Transform translation='0.1 0.47 0'> |
| 333 | <Shape USE='HAnimJointShape'/> |
| 334 | </Transform> |
| 335 | <Shape> |
| 336 | <Appearance> |
| 337 | <Material emissiveColor='1 1 1'/> |
| 338 | </Appearance> |
| 339 | <IndexedLineSet DEF='MCP4toPIP4' coordIndex='0 1'> |
| 340 | <Coordinate point='0.1 0.47 0 0.1 0.7 0'/> |
| 341 | </IndexedLineSet> |
| 342 | </Shape> |
| 343 | </HAnimSegment> |
| 344 |
<!-- HAnimJoint
hanim_r_carpal_proximal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_proximal_interphalangeal_4' center='0.1 0.7 0' name='r_carpal_proximal_interphalangeal_4'> |
| 345 |
<!-- HAnimSegment
hanim_r_carpal_middle_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_middle_phalanx_4' name='r_carpal_middle_phalanx_4'> |
| 346 | <Transform translation='0.1 0.7 0'> |
| 347 | <Shape USE='HAnimJointShape'/> |
| 348 | </Transform> |
| 349 | <Shape> |
| 350 | <Appearance> |
| 351 | <Material emissiveColor='1 1 1'/> |
| 352 | </Appearance> |
| 353 | <IndexedLineSet DEF='PIP4toDIP4' coordIndex='0 1'> |
| 354 | <Coordinate point='0.1 0.7 0 0.1 0.93 0'/> |
| 355 | </IndexedLineSet> |
| 356 | </Shape> |
| 357 | </HAnimSegment> |
| 358 |
<!-- HAnimJoint
hanim_r_carpal_distal_interphalangeal_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_distal_interphalangeal_4' center='0.1 0.93 0' name='r_carpal_distal_interphalangeal_4'> |
| 359 |
<!-- HAnimSegment
hanim_r_carpal_distal_phalanx_4 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_distal_phalanx_4' name='r_carpal_distal_phalanx_4'> |
| 360 | <Transform translation='0.1 0.93 0'> |
| 361 | <Shape USE='HAnimJointShape'/> |
| 362 | </Transform> |
| 363 | <Shape> |
| 364 | <Appearance> |
| 365 | <Material emissiveColor='1 1 1'/> |
| 366 | </Appearance> |
| 367 | <IndexedLineSet DEF='fingertip_r_carpal_distal_interphalangeal_4' coordIndex='0 1'> |
| 368 | <Coordinate point='0.1 0.93 0 0.1 1 0'/> |
| 369 | </IndexedLineSet> |
| 370 | </Shape> |
| 371 | </HAnimSegment> |
| 372 | </HAnimJoint> |
| 373 | </HAnimJoint> |
| 374 | </HAnimJoint> |
| 375 | </HAnimJoint> |
| 376 | <!-- pinky finger --> |
| 377 |
<!-- HAnimJoint
hanim_r_carpometacarpal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpometacarpal_5' center='0.15 0.17 0' name='r_carpometacarpal_5'> |
| 378 |
<!-- HAnimSegment
hanim_r_metacarpal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_metacarpal_5' name='r_metacarpal_5'> |
| 379 | <Transform translation='0.15 0.17 0'> |
| 380 | <Shape USE='HAnimJointShape'/> |
| 381 | </Transform> |
| 382 | <Shape> |
| 383 | <Appearance> |
| 384 | <Material emissiveColor='1 1 1'/> |
| 385 | </Appearance> |
| 386 | <IndexedLineSet DEF='CMC5toMCP5' coordIndex='0 1'> |
| 387 | <Coordinate point='0.15 0.17 0 0.2 0.4 0'/> |
| 388 | </IndexedLineSet> |
| 389 | </Shape> |
| 390 | </HAnimSegment> |
| 391 |
<!-- HAnimJoint
hanim_r_metacarpophalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_metacarpophalangeal_5' center='0.2 0.4 0' name='r_metacarpophalangeal_5'> |
| 392 |
<!-- HAnimSegment
hanim_r_carpal_proximal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_proximal_phalanx_5' name='r_carpal_proximal_phalanx_5'> |
| 393 | <Transform translation='0.2 0.4 0'> |
| 394 | <Shape USE='HAnimJointShape'/> |
| 395 | </Transform> |
| 396 | <Shape> |
| 397 | <Appearance> |
| 398 | <Material emissiveColor='1 1 1'/> |
| 399 | </Appearance> |
| 400 | <IndexedLineSet DEF='MCP5toPIP5' coordIndex='0 1'> |
| 401 | <Coordinate point='0.2 0.4 0 0.23 0.63 0'/> |
| 402 | </IndexedLineSet> |
| 403 | </Shape> |
| 404 | </HAnimSegment> |
| 405 |
<!-- HAnimJoint
hanim_r_carpal_proximal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_proximal_interphalangeal_5' center='0.23 0.63 0' name='r_carpal_proximal_interphalangeal_5'> |
| 406 |
<!-- HAnimSegment
hanim_r_carpal_middle_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_middle_phalanx_5' name='r_carpal_middle_phalanx_5'> |
| 407 | <Transform translation='0.23 0.63 0'> |
| 408 | <Shape USE='HAnimJointShape'/> |
| 409 | </Transform> |
| 410 | <Shape> |
| 411 | <Appearance> |
| 412 | <Material emissiveColor='1 1 1'/> |
| 413 | </Appearance> |
| 414 | <IndexedLineSet DEF='PIP5toDIP5' coordIndex='0 1'> |
| 415 | <Coordinate point='0.23 0.63 0 0.25 0.79 0'/> |
| 416 | </IndexedLineSet> |
| 417 | </Shape> |
| 418 | </HAnimSegment> |
| 419 |
<!-- HAnimJoint
hanim_r_carpal_distal_interphalangeal_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimJoint DEF='hanim_r_carpal_distal_interphalangeal_5' center='0.25 0.79 0' name='r_carpal_distal_interphalangeal_5'> |
| 420 |
<!-- HAnimSegment
hanim_r_carpal_distal_phalanx_5 is a DEF node that has 1 USE node: USE_1 -->
<HAnimSegment DEF='hanim_r_carpal_distal_phalanx_5' name='r_carpal_distal_phalanx_5'> |
| 421 | <Transform translation='0.25 0.79 0'> |
| 422 | <Shape USE='HAnimJointShape'/> |
| 423 | </Transform> |
| 424 | <Shape> |
| 425 | <Appearance> |
| 426 | <Material emissiveColor='1 1 1'/> |
| 427 | </Appearance> |
| 428 | <IndexedLineSet DEF='fingertip_r_carpal_distal_interphalangeal_5' coordIndex='0 1'> |
| 429 | <Coordinate point='0.25 0.79 0 0.26 0.85 0'/> |
| 430 | </IndexedLineSet> |
| 431 | </Shape> |
| 432 | </HAnimSegment> |
| 433 | </HAnimJoint> |
| 434 | </HAnimJoint> |
| 435 | </HAnimJoint> |
| 436 | </HAnimJoint> |
| 437 | </HAnimJoint> |
| 438 | </HAnimJoint> |
| 439 | </HAnimJoint> |
| 440 | <HAnimJoint USE='hanim_humanoid_root' containerField='joints'/> |
| 441 | <HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_2' containerField='joints'/> |
| 442 | <HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_3' containerField='joints'/> |
| 443 | <HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_4' containerField='joints'/> |
| 444 | <HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_5' containerField='joints'/> |
| 445 | <HAnimJoint USE='hanim_r_carpal_interphalangeal_1' containerField='joints'/> |
| 446 | <HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_2' containerField='joints'/> |
| 447 | <HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_3' containerField='joints'/> |
| 448 | <HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_4' containerField='joints'/> |
| 449 | <HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_5' containerField='joints'/> |
| 450 | <HAnimJoint USE='hanim_r_carpometacarpal_1' containerField='joints'/> |
| 451 | <HAnimJoint USE='hanim_r_carpometacarpal_2' containerField='joints'/> |
| 452 | <HAnimJoint USE='hanim_r_carpometacarpal_3' containerField='joints'/> |
| 453 | <HAnimJoint USE='hanim_r_carpometacarpal_4' containerField='joints'/> |
| 454 | <HAnimJoint USE='hanim_r_carpometacarpal_5' containerField='joints'/> |
| 455 | <HAnimJoint USE='hanim_r_metacarpophalangeal_1' containerField='joints'/> |
| 456 | <HAnimJoint USE='hanim_r_metacarpophalangeal_2' containerField='joints'/> |
| 457 | <HAnimJoint USE='hanim_r_metacarpophalangeal_3' containerField='joints'/> |
| 458 | <HAnimJoint USE='hanim_r_metacarpophalangeal_4' containerField='joints'/> |
| 459 | <HAnimJoint USE='hanim_r_metacarpophalangeal_5' containerField='joints'/> |
| 460 | <HAnimJoint USE='hanim_r_midcarpal_1' containerField='joints'/> |
| 461 | <HAnimJoint USE='hanim_r_midcarpal_2' containerField='joints'/> |
| 462 | <HAnimJoint USE='hanim_r_midcarpal_3' containerField='joints'/> |
| 463 | <HAnimJoint USE='hanim_r_midcarpal_4_5' containerField='joints'/> |
| 464 | <HAnimJoint USE='hanim_r_radiocarpal' containerField='joints'/> |
| 465 | <HAnimSegment USE='hanim_r_capitate' containerField='segments'/> |
| 466 | <HAnimSegment USE='hanim_r_carpal' containerField='segments'/> |
| 467 | <HAnimSegment USE='hanim_r_carpal_distal_phalanx_1' containerField='segments'/> |
| 468 | <HAnimSegment USE='hanim_r_carpal_distal_phalanx_2' containerField='segments'/> |
| 469 | <HAnimSegment USE='hanim_r_carpal_distal_phalanx_3' containerField='segments'/> |
| 470 | <HAnimSegment USE='hanim_r_carpal_distal_phalanx_4' containerField='segments'/> |
| 471 | <HAnimSegment USE='hanim_r_carpal_distal_phalanx_5' containerField='segments'/> |
| 472 | <HAnimSegment USE='hanim_r_carpal_middle_phalanx_2' containerField='segments'/> |
| 473 | <HAnimSegment USE='hanim_r_carpal_middle_phalanx_3' containerField='segments'/> |
| 474 | <HAnimSegment USE='hanim_r_carpal_middle_phalanx_4' containerField='segments'/> |
| 475 | <HAnimSegment USE='hanim_r_carpal_middle_phalanx_5' containerField='segments'/> |
| 476 | <HAnimSegment USE='hanim_r_carpal_proximal_phalanx_1' containerField='segments'/> |
| 477 | <HAnimSegment USE='hanim_r_carpal_proximal_phalanx_2' containerField='segments'/> |
| 478 | <HAnimSegment USE='hanim_r_carpal_proximal_phalanx_3' containerField='segments'/> |
| 479 | <HAnimSegment USE='hanim_r_carpal_proximal_phalanx_4' containerField='segments'/> |
| 480 | <HAnimSegment USE='hanim_r_carpal_proximal_phalanx_5' containerField='segments'/> |
| 481 | <HAnimSegment USE='hanim_r_hamate' containerField='segments'/> |
| 482 | <HAnimSegment USE='hanim_r_metacarpal_1' containerField='segments'/> |
| 483 | <HAnimSegment USE='hanim_r_metacarpal_2' containerField='segments'/> |
| 484 | <HAnimSegment USE='hanim_r_metacarpal_3' containerField='segments'/> |
| 485 | <HAnimSegment USE='hanim_r_metacarpal_4' containerField='segments'/> |
| 486 | <HAnimSegment USE='hanim_r_metacarpal_5' containerField='segments'/> |
| 487 | <HAnimSegment USE='hanim_r_trapezium' containerField='segments'/> |
| 488 | <HAnimSegment USE='hanim_r_trapezoid' containerField='segments'/> |
| 489 | </HAnimHumanoid> |
| 490 | </Scene> |
| 491 | </X3D> |
=============================================================================================================================
HAnimHumanoid hanim_Hand_Right skeleton holds X3D4 HAnim2 joints/segments.
[key] jointname : segmentname ^ sitename
[nodes] HAnimJoint (25), : HAnimSegment (24), % HAnimDisplacer (0), $ HAnimMotion (0), ^ HAnimSite (0), @ skin nodes (0)
=============================================================================================================================
HAnimHumanoid DEF='hanim_Hand_Right name='Hand_Right' loa='4'
skeleton
humanoid_root
r_radiocarpal : r_carpal
r_midcarpal_1 : r_trapezium
| r_carpometacarpal_1 : r_metacarpal_1
| r_metacarpophalangeal_1 : r_carpal_proximal_phalanx_1
| r_carpal_interphalangeal_1 : r_carpal_distal_phalanx_1
r_midcarpal_2 : r_trapezoid
| r_carpometacarpal_2 : r_metacarpal_2
| r_metacarpophalangeal_2 : r_carpal_proximal_phalanx_2
| r_carpal_proximal_interphalangeal_2 : r_carpal_middle_phalanx_2
| r_carpal_distal_interphalangeal_2 : r_carpal_distal_phalanx_2
r_midcarpal_3 : r_capitate
| r_carpometacarpal_3 : r_metacarpal_3
| r_metacarpophalangeal_3 : r_carpal_proximal_phalanx_3
| r_carpal_proximal_interphalangeal_3 : r_carpal_middle_phalanx_3
| r_carpal_distal_interphalangeal_3 : r_carpal_distal_phalanx_3
r_midcarpal_4_5 : r_hamate
r_carpometacarpal_4 : r_metacarpal_4
| r_metacarpophalangeal_4 : r_carpal_proximal_phalanx_4
| r_carpal_proximal_interphalangeal_4 : r_carpal_middle_phalanx_4
| r_carpal_distal_interphalangeal_4 : r_carpal_distal_phalanx_4
r_carpometacarpal_5 : r_metacarpal_5
r_metacarpophalangeal_5 : r_carpal_proximal_phalanx_5
r_carpal_proximal_interphalangeal_5 : r_carpal_middle_phalanx_5
r_carpal_distal_interphalangeal_5 : r_carpal_distal_phalanx_5
=============================================================================================================================
The following inset decorates the original HAnimHumanoid skeleton with additional visualization shapes. Authors can copy/paste this version to assist in visually diagnosing skeleton correctness.
Key to author-assist additions inserted in the HAnimHumanoid skeleton:
| <HAnimHumanoid DEF='hanim_Hand_Right' name='Hand_Right' version ='2.0' > | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
440 |
<HAnimJoint USE='hanim_humanoid_root' containerField='joints'/>
|
441 |
<HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_2' containerField='joints'/>
|
442 |
<HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_3' containerField='joints'/>
|
443 |
<HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_4' containerField='joints'/>
|
444 |
<HAnimJoint USE='hanim_r_carpal_distal_interphalangeal_5' containerField='joints'/>
|
445 |
<HAnimJoint USE='hanim_r_carpal_interphalangeal_1' containerField='joints'/>
|
446 |
<HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_2' containerField='joints'/>
|
447 |
<HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_3' containerField='joints'/>
|
448 |
<HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_4' containerField='joints'/>
|
449 |
<HAnimJoint USE='hanim_r_carpal_proximal_interphalangeal_5' containerField='joints'/>
|
450 |
<HAnimJoint USE='hanim_r_carpometacarpal_1' containerField='joints'/>
|
451 |
<HAnimJoint USE='hanim_r_carpometacarpal_2' containerField='joints'/>
|
452 |
<HAnimJoint USE='hanim_r_carpometacarpal_3' containerField='joints'/>
|
453 |
<HAnimJoint USE='hanim_r_carpometacarpal_4' containerField='joints'/>
|
454 |
<HAnimJoint USE='hanim_r_carpometacarpal_5' containerField='joints'/>
|
455 |
<HAnimJoint USE='hanim_r_metacarpophalangeal_1' containerField='joints'/>
|
456 |
<HAnimJoint USE='hanim_r_metacarpophalangeal_2' containerField='joints'/>
|
457 |
<HAnimJoint USE='hanim_r_metacarpophalangeal_3' containerField='joints'/>
|
458 |
<HAnimJoint USE='hanim_r_metacarpophalangeal_4' containerField='joints'/>
|
459 |
<HAnimJoint USE='hanim_r_metacarpophalangeal_5' containerField='joints'/>
|
460 |
<HAnimJoint USE='hanim_r_midcarpal_1' containerField='joints'/>
|
461 |
<HAnimJoint USE='hanim_r_midcarpal_2' containerField='joints'/>
|
462 |
<HAnimJoint USE='hanim_r_midcarpal_3' containerField='joints'/>
|
463 |
<HAnimJoint USE='hanim_r_midcarpal_4_5' containerField='joints'/>
|
464 |
<HAnimJoint USE='hanim_r_radiocarpal' containerField='joints'/>
|
465 |
<HAnimSegment USE='hanim_r_capitate' containerField='segments'/>
|
466 |
<HAnimSegment USE='hanim_r_carpal' containerField='segments'/>
|
467 |
<HAnimSegment USE='hanim_r_carpal_distal_phalanx_1' containerField='segments'/>
|
468 |
<HAnimSegment USE='hanim_r_carpal_distal_phalanx_2' containerField='segments'/>
|
469 |
<HAnimSegment USE='hanim_r_carpal_distal_phalanx_3' containerField='segments'/>
|
470 |
<HAnimSegment USE='hanim_r_carpal_distal_phalanx_4' containerField='segments'/>
|
471 |
<HAnimSegment USE='hanim_r_carpal_distal_phalanx_5' containerField='segments'/>
|
472 |
<HAnimSegment USE='hanim_r_carpal_middle_phalanx_2' containerField='segments'/>
|
473 |
<HAnimSegment USE='hanim_r_carpal_middle_phalanx_3' containerField='segments'/>
|
474 |
<HAnimSegment USE='hanim_r_carpal_middle_phalanx_4' containerField='segments'/>
|
475 |
<HAnimSegment USE='hanim_r_carpal_middle_phalanx_5' containerField='segments'/>
|
476 |
<HAnimSegment USE='hanim_r_carpal_proximal_phalanx_1' containerField='segments'/>
|
477 |
<HAnimSegment USE='hanim_r_carpal_proximal_phalanx_2' containerField='segments'/>
|
478 |
<HAnimSegment USE='hanim_r_carpal_proximal_phalanx_3' containerField='segments'/>
|
479 |
<HAnimSegment USE='hanim_r_carpal_proximal_phalanx_4' containerField='segments'/>
|
480 |
<HAnimSegment USE='hanim_r_carpal_proximal_phalanx_5' containerField='segments'/>
|
481 |
<HAnimSegment USE='hanim_r_hamate' containerField='segments'/>
|
482 |
<HAnimSegment USE='hanim_r_metacarpal_1' containerField='segments'/>
|
483 |
<HAnimSegment USE='hanim_r_metacarpal_2' containerField='segments'/>
|
484 |
<HAnimSegment USE='hanim_r_metacarpal_3' containerField='segments'/>
|
485 |
<HAnimSegment USE='hanim_r_metacarpal_4' containerField='segments'/>
|
486 |
<HAnimSegment USE='hanim_r_metacarpal_5' containerField='segments'/>
|
487 |
<HAnimSegment USE='hanim_r_trapezium' containerField='segments'/>
|
488 |
<HAnimSegment USE='hanim_r_trapezoid' containerField='segments'/>
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
</HAnimHumanoid> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
<!--
Color-coding legend: X3D terminology
<X3dNode DEF='idName' field='value'/>
matches XML terminology
<XmlElement DEF='idName' attribute='value'/>
(Light-blue background: event-based behavior node or statement)
(Grey background inside box: inserted documentation)
(Magenta background: X3D Extensibility)
-->
![]() <!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->
<!--
For additional help information about X3D scenes, please see X3D Tooltips, X3D Resources, and X3D Scene Authoring Hints.
-->