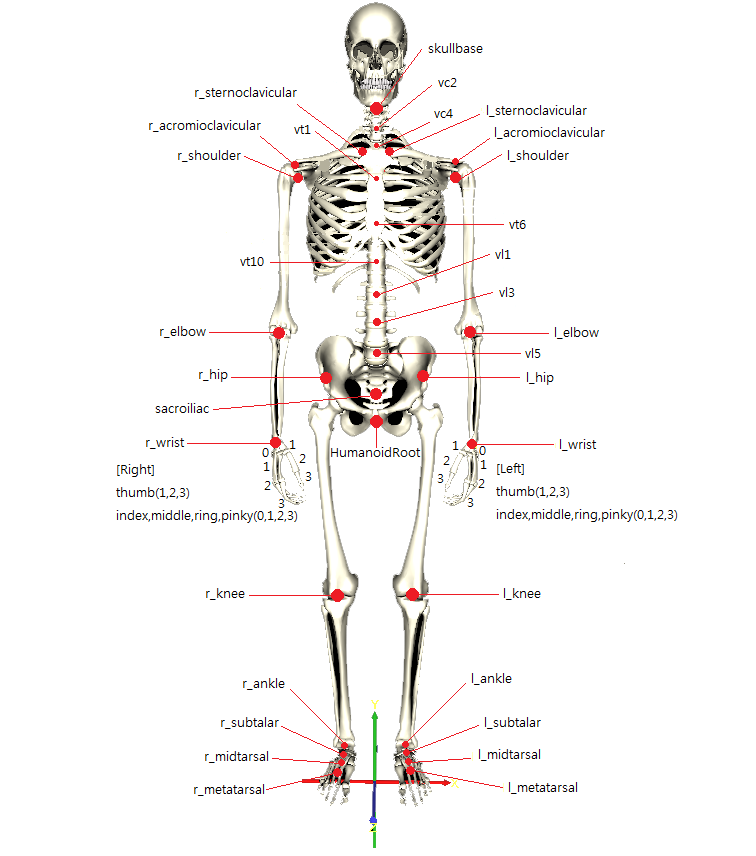
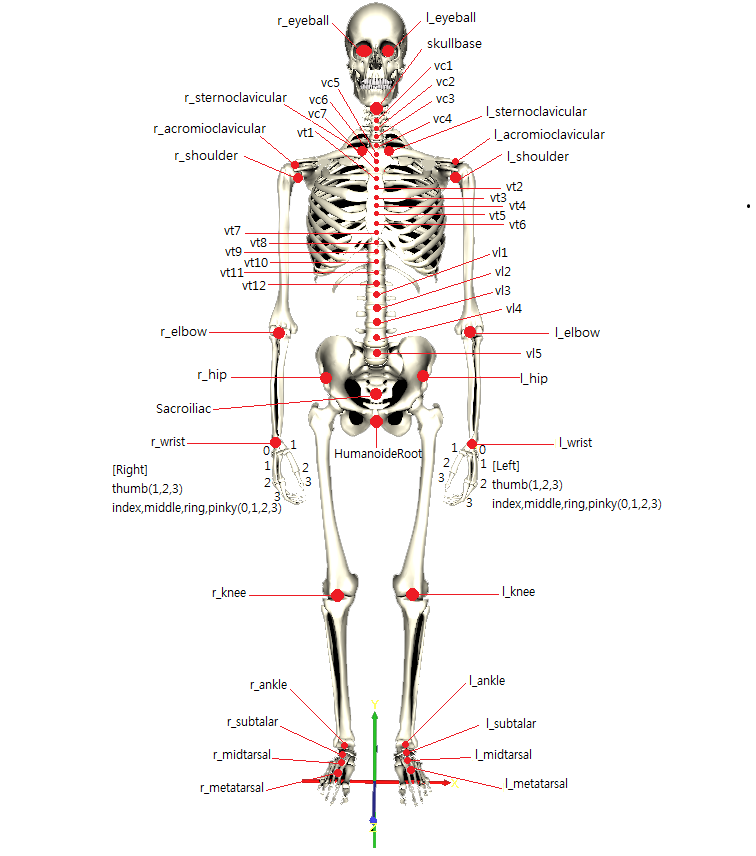
HAnim Specification reference example providing full coverage and visibility of all specified HAnim constructs, also suitable for re-use as an authoring template. Geometry visualizations are derived from HAnimSpecificationLOA3Invisible.x3d visualization report. Resusable exemplar animations also added via heads-up display (HUD) interface to confirm proper parent-child relationships.
Related links: source HAnim1SpecificationLOA3Illustrated.java, X3D Resources, X3D Scene Authoring Hints, and X3D Tooltips.
| meta tags | HumanoidAnimation.Specifications.HAnim1SpecificationLOA3Illustrated Document Metadata |
| title | HAnimSpecificationLOA3Illustrated.x3d |
| description | HAnim Specification reference example providing full coverage and visibility of all specified HAnim constructs, also suitable for re-use as an authoring template. Geometry visualizations are derived from HAnimSpecificationLOA3Invisible.x3d visualization report. Resusable exemplar animations also added via heads-up display (HUD) interface to confirm proper parent-child relationships. |
| reference | https://www.web3d.org/files/specifications/19774/V1.0/HAnim/BodyDimensionsAndLOAs.html#LOA3ExampleSourceWithDiamonds |
| created | 24 April 2013 |
| modified | 2 July 2023 |
| error | Legacy model, not valid as X3D4 HAnim version 2.0 since HAnim version 1.0 has significant differences and is no longer directly supported |
| creator | Matthew T. Beitler, Joe D. Williams, Don Brutzman |
| Image | HAnimSpecificationLOA3Illustrated.png |
| Image | HAnimSpecificationLOA3IllustratedLeftSide.png |
| reference | HAnimSpecificationLOA3Invisible.x3d |
| reference | HAnimSpecificationLOA3Animation.x3d |
| reference | HAnimSpecificationExampleChangeLog.txt |
| Image | images/BonesAllSkeletonFrontViewLOA1.png |
| Image | images/BonesAllSkeletonFrontViewLOA2.png |
| Image | images/BonesAllSkeletonFrontViewLOA3.png |
| TODO | move relevant HAnimSite/Viewpoint pairs into skeleton at appropriate locations |
| warning | BS Contact and H3DViewer have polygon-culling problems at close range (possibly related to avatarSize), other players look OK |
| TODO | insert MetadataInteger nodes indicating LOA for each Joint and Segment |
| reference | Norman Badler et al., ANTHROPOMETRY FOR COMPUTER GRAPHICS HUMAN FIGURES, University of Pennsylvania, 1989. |
| reference | http://www.cis.upenn.edu/~badler/anthro/89-71.ps |
| reference | tables/AnthropometryForComputerGraphicsHumanFigures89-71.pdf |
| translator | Don Brutzman and Joe Williams |
| generator | BS Contact Geo 8.001, http://www.bitmanagement.de/en/products/interactive-3d-clients/bs-contact-geo |
| reference | originals/LOA3ExampleSourceWithDiamondsOriginal.wrl |
| reference | originals/LOA3ExampleSourceWithDiamondsOriginal.x3d |
| reference | originals/LOA3ExampleSourceWithDiamondsOriginalBsContactExport.x3d |
| reference | HAnim Specification Table 4.4 - Face Joint object names, https://www.web3d.org/files/specifications/19774/V1.0/HAnim/concepts.html#FaceJointObjectNames |
| generator | X3D-Edit 3.3, https://savage.nps.edu/X3D-Edit |
| identifier | https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Specifications/HAnimSpecificationLOA3Illustrated.x3d |
| license | ../license.html |
This program uses the
X3D Java Scene Access Interface Library (X3DJSAIL).
It has been produced using the
X3dToJava.xslt
stylesheet
(version control)
which is used to create Java source code from an original .x3d model.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}