Define an experimental new node to simply capture a single pose for an HAnimHumanoid model. Expected usage is to allow HAnimHumanoid to contain multiple Pose nodes which can be activated and composed.
Related links: source HAnimPoseExample.java, X3D Resources, X3D Scene Authoring Hints, and X3D Tooltips.
| meta tags | HumanoidAnimation.Poses.HAnimPoseExample Document Metadata |
| title | HAnimPoseExample.x3d |
| description | Define an experimental new node to simply capture a single pose for an HAnimHumanoid model. Expected usage is to allow HAnimHumanoid to contain multiple Pose nodes which can be activated and composed. |
| info | This model also takes advantage of Inline/IMPORT capabilities (equivalent to USE node) and thus avoids fully copying a large, complex HAnimHumanoid model. Multiple HAnimHumanoid models have been tested satisfactorily, for HAnim version 1 (X3d 3) AND HAnim version 2 (X3D 4). |
| created | 11 December 2025 |
| modified | 14 December 2025 |
| creator | Don Brutzman |
| creator | Joe Williams |
| contributor | Holger Seelig for X_ITE, Sunrize on Windows, scripting guidance, and Inline IMPORT functionality as node-reference equivalent to USE |
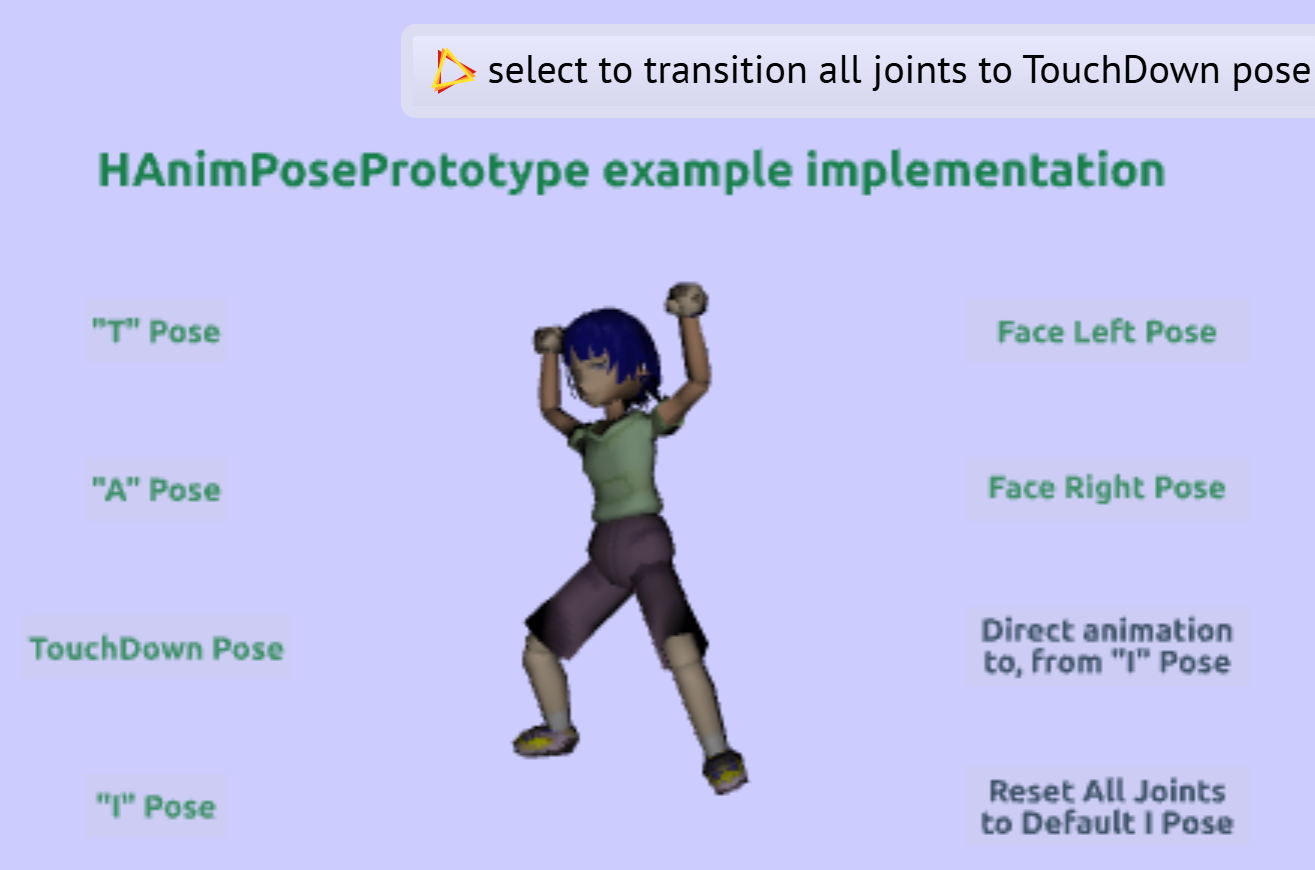
| Image | HAnimPoseExampleTouchDown.png |
| Image | HAnimPoseExampleTouchDownFaceLeftAPose.png |
| warning | under development for X3D 4.1 |
| specificationSection | HAnim Architecture volume 1 version 2.1 draft, clause 6 Object interfaces, section 6.4 Pose |
| specificationUrl | https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/ObjectInterfaces.html#Pose |
| specificationSection | HAnim Architecture volume 1 version 2.1 draft, clause 4 Concepts, section 4.8.2 Modelling of human-like HAnim figures |
| specificationUrl | https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/concepts.html#ModellingHumanLikeHAnimFigures |
| specificationSection | HAnim Architecture volume 1 version 2.1 draft, clause 4 Concepts, section 4.8.3 Poses |
| specificationUrl | https://www.web3d.org/specifications/X3Dv4Draft/ISO-IEC19774/ISO-IEC19774-1/ISO-IEC19774-1v2.1/ISO-IEC19774-1v2.1-WD/Architecture/concepts.html#Poses |
| reference | Direct scene manipulations with Javascript, https://doc.instantreality.org/tutorial/direct-scene-manipulations-with-javascript |
| reference | earlier version of this prototype: originals/HAnimPosePreliminary.x3d |
| generator | X3D-Edit 4.0, https://www.web3d.org/x3d/tools/X3D-Edit |
| generator | Sunrize X3D Editor V1.11.1, https://create3000.github.io/sunrize |
| identifier | https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Poses/HAnimPoseExample.x3d |
| license | https://www.web3d.org/x3d/content/examples/license.html |
This program uses the
X3D Java Scene Access Interface Library (X3DJSAIL).
It has been produced using the
X3dToJava.xslt
stylesheet
(version control)
which is used to create Java source code from an original .x3d model.
{kind=link}
{kind=link}