package HumanoidAnimation.Characters;
import org.web3d.x3d.jsail.Core.*;
import org.web3d.x3d.jsail.fields.*;
import org.web3d.x3d.jsail.Geometry3D.*;
import org.web3d.x3d.jsail.Grouping.*;
import org.web3d.x3d.jsail.HAnim.*;
import org.web3d.x3d.jsail.Rendering.*;
import org.web3d.x3d.jsail.RigidBodyPhysics.*;
import org.web3d.x3d.jsail.Shape.*;
// Javadoc metadata annotations follow, see below for X3DJSAIL Java source code.
/**
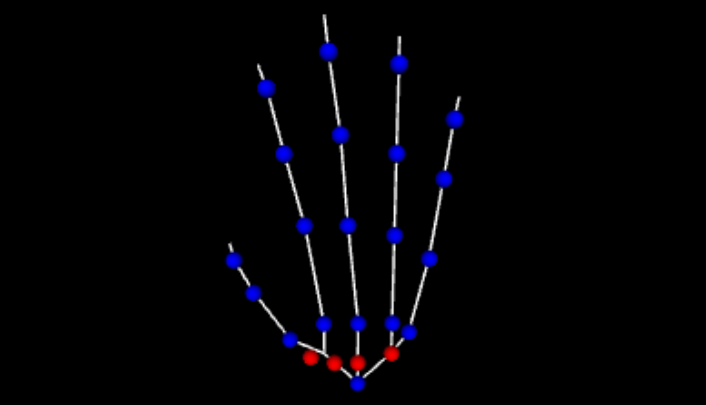
* Left hand, using high-fidelity definitions for HAnim version 2.0.
Related links: source HAnimModelHandLeft.java, X3D Resources, X3D Scene Authoring Hints, and X3D Tooltips.
This program uses the
X3D Java Scene Access Interface Library (X3DJSAIL).
It has been produced using the
X3dToJava.xslt
stylesheet
(version control)
which is used to create Java source code from an original .x3d model.
* @author Kwan Hee YOO, Don Brutzman and Joe Williams
*/
public class HAnimModelHandLeft
{
/** Default constructor to create this object. */
public HAnimModelHandLeft ()
{
initialize();
}
/** Create and initialize the X3D model for this object. */
public final void initialize()
{
try { // catch-all
x3dModel = new X3D().setProfile(X3D.PROFILE_IMMERSIVE).setVersion(X3D.VERSION_4_0)
.setHead(new head()
.addComponent(new component().setName("HAnim").setLevel(1))
.addMeta(new meta().setName(meta.NAME_TITLE ).setContent("HAnimModelHandLeft.x3d"))
.addMeta(new meta().setName(meta.NAME_DESCRIPTION).setContent("Left hand, using high-fidelity definitions for HAnim version 2.0"))
.addMeta(new meta().setName(meta.NAME_CREATOR ).setContent("Kwan Hee YOO, Don Brutzman and Joe Williams"))
.addMeta(new meta().setName(meta.NAME_CREATED ).setContent("26 January 2015"))
.addMeta(new meta().setName(meta.NAME_MODIFIED ).setContent("23 December 2021"))
.addMeta(new meta().setName(meta.NAME_TODO ).setContent("fix visible geometry for thumb and index finger, midcarpal_1 and midcarpal_2"))
.addMeta(new meta().setName(meta.NAME_IMAGE ).setContent("HAnimModelHandRightSegmentVisualizationError.png"))
.addMeta(new meta().setName(meta.NAME_ERROR ).setContent("not yet to scale, also relatively flat"))
.addMeta(new meta().setName(meta.NAME_WARNING ).setContent("TODO will X3D HAnim component add a new level to support LOA-4 functionality?"))
.addMeta(new meta().setName(meta.NAME_INFO ).setContent("TODO describe how to compute and apply offsets for center values whenever attaching this appendage to a body"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/working-groups/humanoid-animation-HAnim"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/documents/specifications/19774/V2.0"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#TheHands"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#f-HandJoints"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/concepts.html#Hierarchy4"))
.addMeta(new meta().setName(meta.NAME_REFERENCE ).setContent("https://www.web3d.org/specifications/X3Dv4/ISO-IEC19775-1v4-IS/Part01/components/hanim.html"))
.addMeta(new meta().setName(meta.NAME_SUBJECT ).setContent("X3D HAnim humanoid animation"))
.addMeta(new meta().setName(meta.NAME_TODO ).setContent("Integrate and confirm Segment/Joint names, Viewpoints."))
.addMeta(new meta().setName(meta.NAME_IDENTIFIER ).setContent("https://www.web3d.org/x3d/content/examples/HumanoidAnimation/Characters/HAnimModelHandLeft.x3d"))
.addMeta(new meta().setName(meta.NAME_GENERATOR ).setContent("X3D-Edit 3.3, https://savage.nps.edu/X3D-Edit"))
.addMeta(new meta().setName(meta.NAME_LICENSE ).setContent("../license.html")))
.setScene(new Scene()
.addChild(new WorldInfo().setTitle("HAnimModelHandLeft.x3d"))
.addChild(new HAnimHumanoid("hanim_Hand_Left").setName("Hand_Left").setLoa(4).setVersion("2.0")
.addComments(" original HAnimHumanoid info='\"authorName=Kwan Hee YOO, Don Brutzman and Joe Williams\"' ")
.setMetadata(new MetadataSet().setName("HAnimHumanoid.info").setReference("https://www.web3d.org/documents/specifications/19774/V2.0/Architecture/ObjectInterfaces.html#Humanoid")
.setMetadata(new MetadataString().setName("authorName").setValue(new String[] {"Kwan Hee YOO, Don Brutzman and Joe Williams"})))
.addSkeleton(new HAnimJoint("hanim_humanoid_root").setName("humanoid_root").setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addComments(" Might consider putting a HAnimSegment here, but that doesn't help with re-use of this hand model ")
.addChild(new HAnimJoint("hanim_l_radiocarpal").setName("l_radiocarpal").setDescription("connection joint of hand to leg above").setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal").setName("l_carpal")
.addChild(new Transform()
.addChild(new Shape("HAnimJointShape")
.setGeometry(new Sphere().setRadius(0.025))
.setAppearance(new Appearance("HAnimJointAppearanceBlue")
.setMaterial(new Material().setDiffuseColor(0.0,0.0,1.0)))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("RCToMC12").setDEF("RCToMC12").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.0,0.0,0.0,0.1,0.1,0.0})))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("RCToMC3").setDEF("RCToMC3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.0,0.0,0.0,0.0,0.07,0.0})))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("RCToMC45").setDEF("RCToMC45").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.0,0.0,0.0,-0.1,0.1,0.0}))))))
.addComments(" MC1 ")
.addChild(new HAnimJoint("hanim_l_midcarpal_1").setName("l_midcarpal_1").setCenter(0.14,0.09,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_trapezium").setName("l_trapezium")
.addChild(new Transform().setTranslation(0.14,0.09,0.0)
.addChild(new Shape("HAnimNewJointShape")
.setGeometry(new Sphere().setRadius(0.025))
.setAppearance(new Appearance("HAnimJointAppearanceRed")
.setMaterial(new Material().setDiffuseColor(1.0,0.0,0.0)))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC12toCMC1").setDEF("MC12toCMC1").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.1,0.1,0.0,0.2,0.15,0.0})))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC1toCMC1").setDEF("MC1toCMC1").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.1,0.1,0.0,0.1,0.2,0.0}))))))
.addComments(" thumb finger ")
.addChild(new HAnimJoint("hanim_l_carpometacarpal_1").setName("l_carpometacarpal_1").setCenter(0.2,0.15,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_metacarpal_1").setName("l_metacarpal_1")
.addChild(new Transform().setTranslation(0.2,0.15,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("CMC1toMCP1").setDEF("CMC1toMCP1").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.2,0.15,0.0,0.3,0.3,0.0}))))))
.addChild(new HAnimJoint("hanim_l_metacarpophalangeal_1").setName("l_metacarpophalangeal_1").setCenter(0.3,0.3,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_proximal_phalanx_1").setName("l_carpal_proximal_phalanx_1")
.addChild(new Transform().setTranslation(0.3,0.3,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MCP11toIP1").setDEF("MCP11toIP1").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.3,0.3,0.0,0.35,0.4,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_interphalangeal_1").setName("l_carpal_interphalangeal_1").setCenter(0.35,0.4,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_distal_phalanx_1").setName("l_carpal_distal_phalanx_1")
.addChild(new Transform().setTranslation(0.35,0.4,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("fingertip_l_carpal_interphalangeal_1").setDEF("fingertip_l_carpal_interphalangeal_1").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.35,0.4,0.0,0.36,0.45,0.0}))))))))))
.addComments(" MC2 ")
.addChild(new HAnimJoint("hanim_l_midcarpal_2").setName("l_midcarpal_2").setCenter(0.07,0.07,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_trapezoid").setName("l_trapezoid")
.addChild(new Transform().setTranslation(0.07,0.07,0.0)
.addChild(new Shape().setUSE("HAnimNewJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC2toCMC2").setDEF("MC2toCMC2").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.1,0.0,-0.1,0.2,0.0}))))))
.addComments(" index finger ")
.addChild(new HAnimJoint("hanim_l_carpometacarpal_2").setName("l_carpometacarpal_2").setCenter(0.1,0.2,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_metacarpal_2").setName("l_metacarpal_2")
.addChild(new Transform().setTranslation(0.1,0.2,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("CMC2toMCP2").setDEF("CMC2toMCP2").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.1,0.2,0.0,0.15,0.5,0.0}))))))
.addChild(new HAnimJoint("hanim_l_metacarpophalangeal_2").setName("l_metacarpophalangeal_2").setCenter(0.15,0.5,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_proximal_phalanx_2").setName("l_carpal_proximal_phalanx_2")
.addChild(new Transform().setTranslation(0.15,0.5,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MCP2toPIP2").setDEF("MCP2toPIP2").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.15,0.5,0.0,0.2,0.7,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_proximal_interphalangeal_2").setName("l_carpal_proximal_interphalangeal_2").setCenter(0.2,0.7,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_middle_phalanx_2").setName("l_carpal_middle_phalanx_2")
.addChild(new Transform().setTranslation(0.2,0.7,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("PIP2toDIP2").setDEF("PIP2toDIP2").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.2,0.7,0.0,0.24,0.87,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_distal_interphalangeal_2").setName("l_carpal_distal_interphalangeal_2").setCenter(0.24,0.87,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_distal_phalanx_2").setName("l_carpal_distal_phalanx_2")
.addChild(new Transform().setTranslation(0.24,0.87,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("fingertip_l_carpal_distal_interphalangeal_2").setDEF("fingertip_l_carpal_distal_interphalangeal_2").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.24,0.87,0.0,0.26,0.93,0.0})))))))))))
.addComments(" MC3 ")
.addChild(new HAnimJoint("hanim_l_midcarpal_3").setName("l_midcarpal_3").setCenter(0.0,0.07,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_capitate").setName("l_capitate")
.addChild(new Transform().setTranslation(0.0,0.07,0.0)
.addChild(new Shape().setUSE("HAnimNewJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC3toCMC3").setDEF("MC3toCMC3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.0,0.07,0.0,0.0,0.2,0.0}))))))
.addComments(" Middle fingle ")
.addChild(new HAnimJoint("hanim_l_carpometacarpal_3").setName("l_carpometacarpal_3").setCenter(0.0,0.2,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_metacarpal_3").setName("l_metacarpal_3")
.addChild(new Transform().setTranslation(0.0,0.2,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("CMC3toMCP3").setDEF("CMC3toMCP3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.0,0.2,0.0,0.03,0.5,0.0}))))))
.addChild(new HAnimJoint("hanim_l_metacarpophalangeal_3").setName("l_metacarpophalangeal_3").setCenter(0.03,0.5,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_proximal_phalanx_3").setName("l_carpal_proximal_phalanx_3")
.addChild(new Transform().setTranslation(0.03,0.5,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MCP3toPIP3").setDEF("MCP3toPIP3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.03,0.5,0.0,0.05,0.75,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_proximal_interphalangeal_3").setName("l_carpal_proximal_interphalangeal_3").setCenter(0.05,0.75,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_middle_phalanx_3").setName("l_carpal_middle_phalanx_3")
.addChild(new Transform().setTranslation(0.05,0.75,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("PIP3toDIP3").setDEF("PIP3toDIP3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.05,0.75,0.0,0.08,0.96,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_distal_interphalangeal_3").setName("l_carpal_distal_interphalangeal_3").setCenter(0.08,0.96,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_distal_phalanx_3").setName("l_carpal_distal_phalanx_3")
.addChild(new Transform().setTranslation(0.08,0.96,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("fingertip_l_carpal_distal_interphalangeal_3").setDEF("fingertip_l_carpal_distal_interphalangeal_3").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {0.08,0.96,0.0,0.09,1.05,0.0})))))))))))
.addComments(" MC45 ")
.addChild(new HAnimJoint("hanim_l_midcarpal_4_5").setName("l_midcarpal_4_5").setCenter(-0.1,0.1,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_hamate").setName("l_hamate")
.addChild(new Transform().setTranslation(-0.1,0.1,0.0)
.addChild(new Shape().setUSE("HAnimNewJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC45toCMC4").setDEF("MC45toCMC4").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.1,0.0,-0.1,0.2,0.0})))))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MC45toCMC5").setDEF("MC45toCMC5").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.1,0.0,-0.15,0.17,0.0}))))))
.addComments(" ring finger ")
.addChild(new HAnimJoint("hanim_l_carpometacarpal_4").setName("l_carpometacarpal_4").setCenter(-0.1,0.2,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_metacarpal_4").setName("l_metacarpal_4")
.addChild(new Transform().setTranslation(-0.1,0.2,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("CMC4toMCP4").setDEF("CMC4toMCP4").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.2,0.0,-0.1,0.47,0.0}))))))
.addChild(new HAnimJoint("hanim_l_metacarpophalangeal_4").setName("l_metacarpophalangeal_4").setCenter(-0.1,0.47,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_proximal_phalanx_4").setName("l_carpal_proximal_phalanx_4")
.addChild(new Transform().setTranslation(-0.1,0.47,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MCP4toPIP4").setDEF("MCP4toPIP4").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.47,0.0,-0.1,0.7,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_proximal_interphalangeal_4").setName("l_carpal_proximal_interphalangeal_4").setCenter(-0.1,0.7,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_middle_phalanx_4").setName("l_carpal_middle_phalanx_4")
.addChild(new Transform().setTranslation(-0.1,0.7,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("PIP4toDIP4").setDEF("PIP4toDIP4").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.7,0.0,-0.1,0.93,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_distal_interphalangeal_4").setName("l_carpal_distal_interphalangeal_4").setCenter(-0.1,0.93,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_distal_phalanx_4").setName("l_carpal_distal_phalanx_4")
.addChild(new Transform().setTranslation(-0.1,0.93,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("fingertip_l_carpal_distal_interphalangeal_4").setDEF("fingertip_l_carpal_distal_interphalangeal_4").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.1,0.93,0.0,-0.1,1.0,0.0}))))))))))
.addComments(" pinky finger ")
.addChild(new HAnimJoint("hanim_l_carpometacarpal_5").setName("l_carpometacarpal_5").setCenter(-0.15,0.17,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_metacarpal_5").setName("l_metacarpal_5")
.addChild(new Transform().setTranslation(-0.15,0.17,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("CMC5toMCP5").setDEF("CMC5toMCP5").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.15,0.17,0.0,-0.2,0.4,0.0}))))))
.addChild(new HAnimJoint("hanim_l_metacarpophalangeal_5").setName("l_metacarpophalangeal_5").setCenter(-0.2,0.4,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_proximal_phalanx_5").setName("l_carpal_proximal_phalanx_5")
.addChild(new Transform().setTranslation(-0.2,0.4,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("MCP5toPIP5").setDEF("MCP5toPIP5").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.2,0.4,0.0,-0.23,0.63,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_proximal_interphalangeal_5").setName("l_carpal_proximal_interphalangeal_5").setCenter(-0.23,0.63,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_middle_phalanx_5").setName("l_carpal_middle_phalanx_5")
.addChild(new Transform().setTranslation(-0.23,0.63,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("PIP5toDIP5").setDEF("PIP5toDIP5").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.23,0.63,0.0,-0.25,0.79,0.0}))))))
.addChild(new HAnimJoint("hanim_l_carpal_distal_interphalangeal_5").setName("l_carpal_distal_interphalangeal_5").setCenter(-0.25,0.79,0.0).setLlimit(new double[] {0.0,0.0,0.0}).setUlimit(new double[] {0.0,0.0,0.0})
.addChild(new HAnimSegment("hanim_l_carpal_distal_phalanx_5").setName("l_carpal_distal_phalanx_5")
.addChild(new Transform().setTranslation(-0.25,0.79,0.0)
.addChild(new Shape().setUSE("HAnimJointShape")))
.addChild(new Shape()
.setAppearance(new Appearance()
.setMaterial(new Material().setEmissiveColor(1.0,1.0,1.0)))
.setGeometry(new IndexedLineSet("fingertip_l_carpal_distal_interphalangeal_5").setDEF("fingertip_l_carpal_distal_interphalangeal_5").setCoordIndex(new int[] {0,1})
.setCoord(new Coordinate().setPoint(new MFVec3f(new double[] {-0.25,0.79,0.0,-0.26,0.85,0.0})))))))))))))
.addJoints(new HAnimJoint().setUSE("hanim_humanoid_root"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_distal_interphalangeal_2"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_distal_interphalangeal_3"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_distal_interphalangeal_4"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_distal_interphalangeal_5"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_interphalangeal_1"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_proximal_interphalangeal_2"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_proximal_interphalangeal_3"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_proximal_interphalangeal_4"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpal_proximal_interphalangeal_5"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpometacarpal_1"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpometacarpal_2"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpometacarpal_3"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpometacarpal_4"))
.addJoints(new HAnimJoint().setUSE("hanim_l_carpometacarpal_5"))
.addJoints(new HAnimJoint().setUSE("hanim_l_metacarpophalangeal_1"))
.addJoints(new HAnimJoint().setUSE("hanim_l_metacarpophalangeal_2"))
.addJoints(new HAnimJoint().setUSE("hanim_l_metacarpophalangeal_3"))
.addJoints(new HAnimJoint().setUSE("hanim_l_metacarpophalangeal_4"))
.addJoints(new HAnimJoint().setUSE("hanim_l_metacarpophalangeal_5"))
.addJoints(new HAnimJoint().setUSE("hanim_l_midcarpal_1"))
.addJoints(new HAnimJoint().setUSE("hanim_l_midcarpal_2"))
.addJoints(new HAnimJoint().setUSE("hanim_l_midcarpal_3"))
.addJoints(new HAnimJoint().setUSE("hanim_l_midcarpal_4_5"))
.addJoints(new HAnimJoint().setUSE("hanim_l_radiocarpal"))
.addSegments(new HAnimSegment().setUSE("hanim_l_capitate"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_distal_phalanx_1"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_distal_phalanx_2"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_distal_phalanx_3"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_distal_phalanx_4"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_distal_phalanx_5"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_middle_phalanx_2"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_middle_phalanx_3"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_middle_phalanx_4"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_middle_phalanx_5"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_proximal_phalanx_1"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_proximal_phalanx_2"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_proximal_phalanx_3"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_proximal_phalanx_4"))
.addSegments(new HAnimSegment().setUSE("hanim_l_carpal_proximal_phalanx_5"))
.addSegments(new HAnimSegment().setUSE("hanim_l_hamate"))
.addSegments(new HAnimSegment().setUSE("hanim_l_metacarpal_1"))
.addSegments(new HAnimSegment().setUSE("hanim_l_metacarpal_2"))
.addSegments(new HAnimSegment().setUSE("hanim_l_metacarpal_3"))
.addSegments(new HAnimSegment().setUSE("hanim_l_metacarpal_4"))
.addSegments(new HAnimSegment().setUSE("hanim_l_metacarpal_5"))
.addSegments(new HAnimSegment().setUSE("hanim_l_trapezium"))
.addSegments(new HAnimSegment().setUSE("hanim_l_trapezoid"))));
}
catch (Exception ex)
{
System.err.println ("*** Further hints on X3DJSAIL errors and exceptions at");
System.err.println ("*** https://www.web3d.org/specifications/java/X3DJSAIL.html");
throw (ex);
}
}
// end of initialize() method
/** The initialized model object, created within initialize() method. */
private X3D x3dModel;
/**
* Provide a
* shallow copy
* of the X3D model.
* @see X3D
* @return HAnimModelHandLeft model
*/
public X3D getX3dModel()
{
return x3dModel;
}
/**
* Default main() method provided for test purposes, uses CommandLine to set global ConfigurationProperties for this object.
* @param args array of input parameters, provided as arguments
* @see X3D.handleArguments(args)
* @see X3D.validationReport()
* @see CommandLine
* @see CommandLine.USAGE
* @see ConfigurationProperties
*/
public static void main(String args[])
{
System.out.println("Build this X3D model, showing validation diagnostics...");
X3D thisExampleX3dModel = new HAnimModelHandLeft().getX3dModel();
// System.out.println("X3D model construction complete.");
// next handle command line arguments
boolean hasArguments = (args != null) && (args.length > 0);
boolean validate = true; // default
boolean argumentsLoadNewModel = false;
String fileName = new String();
if (args != null)
{
for (String arg : args)
{
if (arg.toLowerCase().startsWith("-v") || arg.toLowerCase().contains("validate"))
{
validate = true; // making sure
}
if (arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_X3D) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_CLASSICVRML) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_X3DB) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_VRML97) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_EXI) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_GZIP) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_ZIP) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_HTML) ||
arg.toLowerCase().endsWith(X3D.FILE_EXTENSION_XHTML))
{
argumentsLoadNewModel = true;
fileName = arg;
}
}
}
if (argumentsLoadNewModel)
System.out.println("WARNING: \"HumanoidAnimation.Characters.HAnimModelHandLeft\" model invocation is attempting to load file \"" + fileName + "\" instead of simply validating itself... file loading ignored.");
else if (hasArguments) // if no arguments provided, this method produces usage warning
thisExampleX3dModel.handleArguments(args);
if (validate)
{
// System.out.println("--- TODO fix duplicated outputs ---"); // omit when duplicated outputs problem is solved/refactored
String validationResults = thisExampleX3dModel.validationReport();
// System.out.println("-----------------------------------"); // omit when duplicated outputs problem is solved/refactored
System.out.print("HumanoidAnimation.Characters.HAnimModelHandLeft self-validation test confirmation: ");
if (!validationResults.equals("success"))
System.out.println();
System.out.println(validationResults.trim());
// experimental: test X3DJSAIL output files
// Characters/HAnimModelHandLeft_JavaExport.* file validation is checked when building X3D Example Archives
String filenameX3D = "Characters/HAnimModelHandLeft_JavaExport.x3d";
String filenameX3DV = "Characters/HAnimModelHandLeft_JavaExport.x3dv";
String filenameJSON = "Characters/HAnimModelHandLeft_JavaExport.json";
thisExampleX3dModel.toFileX3D (filenameX3D);
thisExampleX3dModel.toFileClassicVRML(filenameX3DV);
// TODO thisExampleX3dModel.toFileJSON (filenameJSON);
}
}
}
{kind=link}